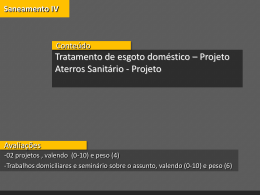
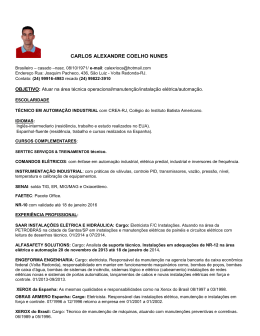
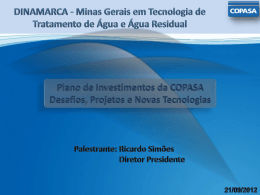
VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental X-006 – OPERAÇÃO QUASE AUTOMÁTICA DE UMA ESTAÇÃO DE TRATAMENTO DE ESGOTO SANITÁRIO Celso José Munaro(1) Graduação em Engenharia Elétrica pela Universidade Federal de Santa Maria (UFSM), Santa Maria, RS, Brasil, em 1987. Mestrado e Doutorado em Engenharia Elétrica pela Universidade Estadual de Campinas (UNICAMP), Campinas, SP, Brasil, em 1990 e 1994, respectivamente. Desde 1992 é professor do Departamento de Engenharia Elétrica da Universidade Federal do Espírito Santo (UFES). Suas áreas de interesse envolvem controle de processos e sistemas de automação industrial. Paulo Faria Santos Amaral Graduou-se em Engenharia Eletrônica pelo Instituto Tecnológico de Aeronáutica (ITA), São José dos Campos, SP, Brasil, em 1976 e obteve os títulos de Mestre em Engenharia Elétrica pelo Instituto Nacional de Pesquisas Espaciais (INPE) em 1979 e Doutor em Engenharia Elétrica na Escola Politécnica da USP, em 1985. É professor do Departamento de Engenharia Elétrica da UFES e suas áreas de interesse envolvem robótica e sistema microprocessados. Wagner Teixeira da Costa Graduou-se em Engenharia Elétrica pela Universidade Federal do Espírito Santo (UFES), Vitória, ES, Brasil, em 2001 e atualmente é aluno do Mestrado em Engenharia Elétrica da UFES. Ricardo Franci Gonçalves Engenheiro Civil e Sanitarista – UERJ (1984), Pós-graduado em Eng a de Saúde Pública -ENSP/RJ (1985), DEA - Ciências do Meio Ambiente - Univ. Paris XII, ENGREF, ENPC, Paris (1990), Doutor em Engenharia do Tratamento e Depuração de Água – INSA de Toulouse, França (1993), Prof. Adjunto do DHS e do PMEA - UFES. Leonardo Pereira Bastos Engenheiro Eletricista pela Universidade Federal do Espírito Santo (1997), mestrando do Programa de PósGraduação em Engenharia Elétrica pela Universidade Federal do Espírito Santo. Rodrigo Ramos Engenheiro Eletricista pela Universidade Federal do Espírito Santo (1998), mestrando do Programa de PósGraduação em Engenharia Mecânica pela Universidade Federal do Espírito Santo. Endereço(1): Av. Fernando Ferrari, s/n – Campus Universitário de Goiabeiras – Prédio CT II – Vitória – ES – CEP: 29090-900 - Brasil - Tel: (27) 3335-2190 - e-mail: [email protected] RESUMO Um sistema para operação quase automática de uma ETE compacta tipo reator anaeróbio seguido de biofiltros aerados submersos é apresentado. O termo quase é incluído porque apenas uma das operações que deve ser realizada de forma rotineira não foi automatizada. As operações executadas bem como eventos de interesse e medições são registrados e disponibilizados através de relatórios ao operador acessados remotamente. Falhas em equipamento são comunicadas e sempre que possível resolvidas localmente pelo sistema. A solução proposta reduz custos com pessoal enquanto melhora a qualidade do tratamento, pela supervisão constante do processo. PALAVRAS-CHAVE: Automação industrial, Tratamento de esgoto sanitário, Telemetria, Instrumentação. INTRODUÇÃO Novas estações de tratamento de esgoto sanitário (ETEs) compactas, combinando reatores anaeróbios e aeróbios em série, apresentam-se como excelente alternativa para áreas urbanas de pequeno e médio porte, tendo nível de aceitação crescente no Estado do Espírito Santo. Em menos de 2 anos foram 29 ETEs compactas implantadas no Espírito Santo e demais Estados [1]. Sistemas de automação têm sido pesquisados e desenvolvidos para atender as necessidades particulares neste tipo de processo, para os quais sistemas usuais de automação industrial tornam-se inviáveis quando estações de pequeno porte são consideradas [2]. O sistema de automação desejado deve realizar todas as operações de rotina, emitir relatórios de operação e enviar alarmes a um operador remoto em caso de falha em algum equipamento, de modo que a ETE possa ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 1 VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental operar quase sem a presença de um operador. O presente artigo descreve novos resultados adicionados àqueles apresentados em [2], permitindo verificar que apenas a remoção de sólidos no gradeamento do esgoto que chega à ETE ainda carece da presença de um operador humano. DESCRIÇÃO DO SISTEMA DE AUTOMAÇÃO DESENVOLVIDO O sistema de automação apresentado nesta proposta foi estudado e desenvolvido especialmente para ETEs. Os equipamentos especificados atendem requisitos de baixo custo, proteção contra ambientes agressivos, confiabilidade e facilidade de operação. Assim, tem-se garantido um sistema que possa ser instalado em ETEs de pequeno porte, localizadas remotamente e operadas por pessoas que não possuam conhecimento técnico em automação. Biogás Esgoto Efluente Elevatória UASB Biofiltro Lodo Descartado Aerador Lodo da Lavagem A figura 1 mostra a estrutura geral da ETE a ser operada automaticamente. Figura 1: Diagrama de blocos da ETE A estação elevatória recebe o esgoto e que é bombeado para o reator anaeróbio (Upflow Unaerobic Sludge Blanket - UASB). A elevatória também recebe o esgoto de lavagem dos biofiltros aerados submersos – BF, que deve retornar ao UASB. No reator UASB ocorre a remoção de matéria orgânica da ordem de 70% com o tempo de detenção hidráulico médio de 8,0 horas. A remoção da matéria orgânica no reator ocorre com subseqüente liberação de biogás (CH4, CO2 H2S e NH3, além de outros). O biogás é coletado em uma câmara de gás existente no interior do reator, de onde é canalizado até a área de beneficiamento, que fica próxima ao leito de secagem. Após a lavagem, o gás é queimado, e o calor resultante da queima poderá ser aproveitado para a higienização do lodo. O pós-tratamento do efluente anaeróbio é realizado nos biofiltros aerados submersos, objetivando a remoção de matéria orgânica e sólidos suspensos remanescentes, de forma a compatibilizar o efluente tratado aos padrões de lançamento fixados pela legislação ambiental. As britas comerciais tipos três, dois, um e zero foram utilizadas em diferentes alturas como material suporte no biofiltros. A maioria dos BFs dispõem de um sistema de aeração artificial, sendo que na ETE compacta desenvolvida, os BFs possuem um sistema de aeração tipo Venturi, no qual uma bomba succiona o efluente aeróbio, capta ar nas imediações dos orifícios e injeta água e ar dissolvido na base dos biofiltros. O ar é captado nas imediações dos principais pontos de emissão de compostos odorantes (caixa de areia, elevatória, leito de secagem) e re-introduzido nos BFs, constituindo num processo de. A vazão de ar necessária para os BFs foi projetada a partir de uma taxa de 18 Nm3 de ar/kg de DBO5 removido. Os BFs são interligados na sua parte superior, o que permite a utilização do efluente tratado na operação de lavagem, que é realizada em fluxo descendente sem a injeção de ar. No sistema proposto o lodo de excesso produzido nos biofiltros é recirculado para o UASB, onde ocorre a digestão e adensamento pela via anaeróbia. O excesso de lodo produzido no UASB, que apresenta elevado grau de estabilização e adensamento, é descartado por gravidade e disposto em leitos de secagem para desidratação. Assim o reator UASB é a única fonte de emissão de lodo. O lodo desidratado pode ainda ser reutilizado, após passar por etapas de estabilização e higienização com cal, ou pasteurização. ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 2 VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental O sistema de automação proposto deve realizar todas as ações necessárias para garantir a correta operação da ETE, de forma a: • garantir a execução automática das operações normais, como lavagem dos biofiltros, descarte de lodo do UASB, controle das bombas da elevatória e das bombas de aeração do biofiltro; • monitorar o funcionamento dos equipamentos utilizados na automação, gerando alarmes em caso de falhas; • permitir, quando requisitado pelo usuário, a operação manual de todos os equipamentos da ETE, com supervisão ou não do controlador programável; • registrar, em intervalos de tempo pré-programados pelo usuário, a informação de vazão afluente aos reatores UASB. Na figura 2 pode-se observar os equipamentos necessários ao acionamento e à captura dos sinais utilizados pelo sistema de automação proposto. Na tabela 1 pode ser vista a legenda utilizada para os equipamentos mostrados na figura 1. Os sensores de nível são instalados na elevatória, no leito de secagem, nos biofiltros e no clarificador (reservatório de saída), sendo que há sensores redundantes para detectar uma eventual falha nos mesmos. A medição de corrente nas bombas permite detectar se as mesmas estão operando e se esta operação ocorre em uma faixa prevista pelo fabricante. Assim, falhas podem ser previstas antes que ocorram. As quatro válvulas para lavagem dos biofiltros bem como a válvula para descarte de lodo do UASB foram automatizadas utilizando um cilindro pneumático acionado por ar comprimido. A figura 3 permite ver este acionamento em detalhe. Uma falha no acionamento é detectada através de uma micro-chave magnética. Um compressor com reservatório garante o acionamento destas válvulas que têm 6 polegadas de diâmetro. Tal solução representou uma redução significativa no custo das válvulas. As duas bombas da elevatória (B1 e B2) se revezam no bombeamento do esgoto para o UASB, e, em caso de falha de uma delas, a operação continua normalmente. As duas bombas de aeração (A1 e A2) operam de forma similar, injetando uma mistura de água e ar na base dos biofiltros. O compressor com reservatório (C1) fornece o ar comprimido para as válvulas. Uma eventual falha é detectada através do monitoramento de um pressostato, durante a qual nenhum acionamento de válvula é realizado. O medidor de vazão, com registro dos dados, permite acompanhar a quantidade de esgoto tratado na ETE, além de permitir verificar falhas no sistema de envio de esgoto à ETE. Figura 2: Diagrama da ETE com os equipamentos da automação Tubulação de ar para as válvulas Tubulação de ar para os BFs Válvulas automatizadas dos BFs Lodo de lavagem dos BFs BF 1 C1 A1 CP1 BF 2 A2 BF 4 Ar + Água para aeração P1 Casa das bombas UASB para o Leito de Secagem BF 3 Efluente final bombeado pelas bombas A1 e A2 Válvula automatizada do UASB Elevatória B1 N1 B2 N2 N3 CP2 Eletrodutos Medidor de vazão Esgoto afluente ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 3 VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental Tabela 1: Legenda para a figura 2 B1 Bomba 1 da elevatória B2 Bomba 2 da elevatória C1 N1 N2 N3 A1 A2 Compressor 1 para as válvulas Sensor de nível 1 da elevatória Sensor de nível 2 da elevatória Sensor de nível 3 da elevatória Bomba 1 para aeração do BF Bomba 2 para aeração do BF P1 V1 V2 V3 V4 V5 CP1 CP2 Painel de comando 1 Válvula automatizada do BF 1 Válvula automatizada do BF 2 Válvula automatizada do BF 3 Válvula automatizada do BF 4 Válvula automatizada do UASB Controlador programável 1 Controlador programável 2 As tubulações mostradas na figura 2 são utilizadas para a passagem da linha de ar comprimido e dos sinais elétricos necessários ao sistema de controle, composto de dois controladores programáveis. O controlador programável 1 (CP1) é instalado junto ao painel de comando com as atribuições de efetuar todas as rotinas de controle e supervisão da ETE. Ele se comunica com o controlador programável 2 (CP2), instalado no topo da ETE, que efetua as medições de vazão de esgoto, registra estas medidas bem como eventos importantes da ETE (operações executas e falhas), além de permitir a comunicação remota via telefonia celular (ou rádio). A interação local do operador com o sistema de automação é feita através de uma interface homem-máquina (IHM), composta de um teclado e mostrador digital, podendo assim alterar parâmetros de operação da ETE, além de iniciar operações e ligar ou desligar equipamentos. A IHM também permite informar a um operador as operações que estão sendo executadas bem como falhas em equipamentos. Figura 3: Detalhe do acionamento pneumático das válvulas A comunicação remota descrita foi implementada via telefonia celular, dado seu baixo custo. Um telefone celular convencional pré-pago foi instalado no interior do controlador programável 2, se comunicando com este via saída serial RS232. Um programa é instalado em um computador conectado a uma linha telefônica via modem. Ao ser executado, este programa disca o número do telefone celular, se conecta ao controlador programável e a partir de então, passa-se a ter acesso à operação da ETE como se estivesse conectado localmente. O sistema de telemetria está funcional para o sistema digital utilizado pela empresa Telefônica Celular (CDMA), uma das operadoras de telefonia celular do estado do Espírito Santo. É exigência para o funcionamento do sistema de telemetria que o sinal no local da ETE seja digital e tenha uma boa intensidade. ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 4 VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental OPERAÇÃO DA ETE AUTOMATIZADA Resultam do sistema de automação descrito: • Automação das operações: - lavagem dos biofiltros (BFs), em intervalos pré-programados; controle das duas bombas da elevatória (B1 e B2), com alternância de funcionamento das mesmas, visando o equilíbrio do número de horas de trabalho; controle das duas bombas de aeração (A1 e A2), com alternância de funcionamento das mesmas, evitando que um deles não venha a funcionar quando necessário. • Supervisão dos equipamentos com possibilidade de detecção de falhas: - bombas de aeração (A1 e A2); bombas da elevatória (B1 e B2); válvulas automatizadas dos biofiltros (V1, V2, V3 e V4); válvula automatizada do UASB (V5); chaves-bóia (N1, N2, N3 e N4); compressor utilizado na automação das válvulas automatizadas. • Disponibilização de três opções de funcionamento do sistema de automação: - quase automático, com todas as operações sendo realizadas automaticamente; supervisão, registrando as medições de vazão de esgoto e os eventos ocorridos, mas não efetuando controles, com exceção da alternância das bombas da elevatória; manual, com todos os sistemas de automação desligados e as operações sendo realizadas manualmente por um operador. - No modo de operação quase automático, cabe ao operador efetuar a limpeza periódica do gradeamento e a substituição de algum equipamento defeituoso. Deve ainda se dirigir à ETE toda vez que houver falhas de operação, comunicadas via ligação telefônica. Para operar no modo manual, uma chave localizada no painel deve ser acionada. Todos equipamentos passam a ser acionados diretamente pelo operador. CONCLUSÃO Em laboratório, todos os algoritmos de controle e de detecção de falhas foram testados e apresentam-se funcionando. Esses algoritmos são os programas que são executados nos controladores programáveis CP1 e CP2. Na ETE experimental da UFES, fez-se o teste em campo dos controladores e automatizou-se a válvula de descarte de um dos BFs. Na ETE comercial de Canivete, em Linhares - ES, um controlador programável está instalado e operando há um ano. Este controlador efetua medições da vazão afluente e possui implementada a telemetria utilizando um telefone celular digital pré-pago. Possíveis problemas em bombas podem ser detectados e um operador pode ser contatado através de uma ligação telefônica feita pelo próprio controlador. Todos os equipamentos foram aprovados nos testes de confiabilidade, facilidade de operação e resistência ao ambiente agressivo. Assim, no aspecto técnico, a automação completa de uma ETE está pronta. No momento, aguarda-se apenas financiamento para sua implementação em uma ETE comercial. ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 5 VI Simpósio Ítalo Brasileiro de Engenharia Sanitária e Ambiental REFERÊNCIAS BIBLIOGRÁFICAS 1. BF,S.S.,SANT´ANA,T.D., WANKE,R.,DA SILVA, G.M., SALIM, F.P.C., NARDOTTO, J.I.,NETTO, E.S.,PEGORETTI, J.M. Novas ETEs compactas associando reatores anaeróbios e aeróbios em série. XXVII CONGRESSO INTERAMERICANO DE ENGENHARIA SANITÁRIA E AMBIENTAL. João Pessoa, PB, 2001. 2. MUNARO,C.J., BASTOS,L.P. Sistema de Automação de baixo custo para estações compactas de tratamento de esgoto sanitário. XXVII CONGRESSO INTERAMERICANO DE ENGENHARIA SANITÁRIA E AMBIENTAL. João Pessoa, PB, 2001. ABES - Associação Brasileira de Engenharia Sanitária e Ambiental 6
Download