Periféricos e Interfaces
had
2
A unidade central de processamento
2.1 Generalidades
A unidade central de processamento ou Central Processing Unit, é o componente mais
importante de um computador. Podem existir vários processadores num computador mas um
será o central – a CPU.
A CPU é um processador porque processa (calcula e move) dados. No caso geral, o
processador lê os dados da memória, efectua alguma operação com estes, e escreve os
resultados de novo na memória, possivelmente noutro endereço.
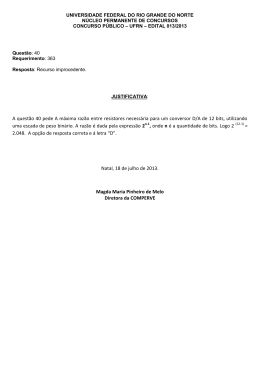
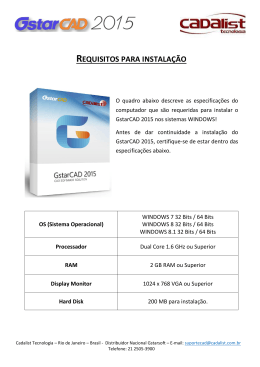
Fig. 2-1: Estrutura geral de um microprocessador (in Messmer, 2002)
Acima está representado o diagrama blocos genérico de um microprocessador. A unidade de
execução (EU) é responsável pelo processamento dos dados e é composta por uma unidade de
controlo (CU), uma unidade aritmética e lógica (ALU), e vários registos para operar os dados.
Estes são posições de memória dentro do núcleo do CPU, cujo acesso é muito mais rápido
que o acesso à memória principal e onde são executadas operações lógicas e aritméticas.
A unidade de bus (BU) estabelece a comunicação com o system bus (bus de dados, endereços
controlo), e deste modo com o exterior.
A unidade de endereçamento (AU), calcula o endereço de memória a aceder pela unidade de
bus. Este endereço é colocado no bus de endereços.
A unidade de bus acede às posições de memória, através do bus de dados, e coloca-as no
prefetch queue. A unidade de instrução (IU) lê a instrução do prefetch queue, descodifica-a e
transfere-a para a unidade de execução, onde é executada.
Para ser executada uma instrução poderão ser necessários operandos. Para os obter poderá ser
necessário aceder a dados na memória e colocá-los nos registos da unidade de execução. Estes
são acedidos também pela unidade de bus. Assim não existe distinção entre memória de
instruções e de dados. Ambos podem estar guardados no mesmo conjunto de chips de
memória, embora em endereços diferentes.
2.2 Evolução dos processadores
Quanto mais rápido o processador, mais rápido pode efectuar cálculo e movimentação de
dados, de modo que mais rápida será a execução de um programa. Existem várias meios de
aumentar o desempenho de um processador:
a) Aumentar a frequência de relógio
Deste modo mais instruções podem ser executadas por unidade de tempo. No entanto
aumentar a frequência implica uma maior dissipação de calor.
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 1/12
Periféricos e Interfaces
had
b) Aumentar a largura dos barramentos
Barramentos com um maior número de linhas permitem comunicar um maior número de
bits num ciclo. Um barramento de dados de 64 bits permite transferir o dobro dos dados
que um barramento de 32 bits na mesma unidade de tempo.
c) Optimização do desenho do processador
Pretende-se que possa ser efectuado um máximo de processamento num ciclo. Para isso
poderá ser necessário uma maior complexidade de desenho, o que implica mais
transístores por unidade de área. A escala de integração actual permite a inclusão num só
chip de mais que uma ALU e FPU. De facto alguns chips incluem várias unidades de
execução.
2.2.1 A lei de Moore
Em 1965, Gordon Moore, co-fundador da Intel, estimou que o número de transistores
possíveis de serem incluídos no chip do processador dobraria em cada 18 meses, dobrando
assim a velocidade.
Moore esperava que esta regra se aplicasse até 1975, no entanto ainda hoje se mantém válida
2.3 A familia de microprocessadores INTEL x86 e compatíveis
Na tabela seguinte têm-se uma breve descrição da evolução dos CPUs usados em PCs. As
gerações referem-se a gerações de PCs. Esta classificação não é única. De qualquer forma
primeira geração de PCs data de 1978. No entanto o protótipo do primeiro chip da Intel, o
4004, data 1971. A Intel desenvolveu também o 80186/88 como uma evolução do 8086/88
que não foram no entanto utilizados em PCs. Aliás não foi desenvolvido um coprocessador
matemático para este processador sendo usado o 8087. Já para os processadores 80286 e
80386 foram desenvolvidos coprocessadores matemáticos o 80287 e o 80387. A partir do
80486 a unidade de virgula flutuante (Floating Point Unit) foi incluída no chip do
processador.
Geração de
PC
1ª
2ª
3ª
4ª
5ª
5ª melhorada
6ª
6ª melhorada
7ª
8ª
Processadores
Ano
Nº de transistores
Intel 8088 e 8086
Intel 80286
Intel 80386
Intel 80486
Intel Pentium, Cyrix 6x86 e
AMD K5
Intel Pentium MMX,
IBM/Cyrix 6x86MX
Intel Pentium Pro, AMD K6,
Intel Pentium II, AMD K6-2
Intel Pentium III, AMD K6-3
Intel Pentium 4, AMD original
Athlon, Athlon Thunderbird,
Athlon XP
Intel Itanium, AMD Athlon 64,
Intel Petium 5, AMD Opteron
78-81
1984
87-88
90-92
93-95
29 K
134 K
275 K
1200 K
3100 K
http://w3.ualg.pt/~hdaniel/pin
97
4500 K – 6000 K
95-98
5500 K – 9300 K
99
99-2001
9300 K
22000K – 42000k
> 2002
PIN 2005-6
T02 - 2/12
Periféricos e Interfaces
had
Fig. 2-2: Intel 8086 e AMD Athlon
2.3.1 Arquitectura do 8086/8
O 8086 e o 8088 são dois processadores muito idênticos. Ambos tem uma arquitectura interna
de 16 bits, isto é os registos da unidade de execução são de 16 bits. O prefetch queue é de 6
bytes no 8086 e de 5 no 8088.
O bus de endereços é de 20 bits de modo que pode endereçar 220 = 1 MByte = 1024 KBytes =
1,048,576 bytes de memória.
Processadores mais recentes que mantêm compatibilidade com o funcionamento do 8086
usam o chamado modo real.
2.3.1.1
Endereçamento de memória
Endereçamento de memória é segmentado em blocos de 64 KBytes. Um segmento começa
sempre num endereço de memória múltiplo de 16. Para se aceder a uma posição de memória
dentro do segmento é utilizado um valor de offset. Este representa a distância em bytes que
vai do endereço de base do segmento, isto é o início do segmento, a uma outra localização de
memória dentro do limite de 64KBytes. Assim todas as posições de memória dentro de um
segmento podem ser endereçados por 16 bits, de modo que o offset varia entre 0000H a
FFFFH (0 a 65,355 em decimal).
Nesta arquitectura segmentada, o endereço de memória lógico é composto por um par
segmento:offset, ambos de 16 bits:
0000H-FFFFH : 0000H-FFFFH
segmento
offset
O endereço físico, é obtido deslocando o valor do segmento 4 bits para a esquerda e
adicionando o offset. Repare-se que o valor do segmento é assim multiplicado por 16, daí que
o inicio do segmento coincida com um endereço físico múltiplo de 16.
Exemplo:
endereço lógico: 1234H:0234H
+
12340H
0234H
12574H
http://w3.ualg.pt/~hdaniel/pin
(segmento deslocado 4 bits para a esquerda = x16)
(endereço físico de 20 bits)
PIN 2005-6
T02 - 3/12
Periféricos e Interfaces
had
2.3.1.2
Registos do processador
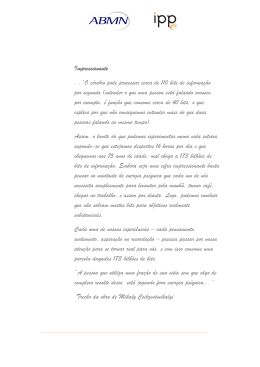
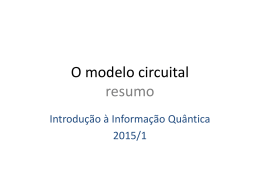
O 8086/88 tem 14 registos de 16 bits, como mostra a figura abaixo.
Fig. 2-3: Registos do 8086/88 (in Tischer and Jennrich 1996)
2.3.1.2.1
Registos de uso geral
Os registos AX, BX, CX e DX são usados para armazenamento de dados e servem de
operandos para passagem de parâmetros para as funções da BIOS ou do sistema operativo.
AX – também chamado de acumulador, normalmente acumula os resultados de um cálculo.
É necessário quando se fazem multiplicações e divisões
BX – também chamado base, pode ser usado para guardar um endereço base de um conjunto
de dados contíguos para acesso indexado a posições de memória, como por exemplo um
array. Pode também ser usado como operando.
CX – também chamado de contador. Pode ser usado na implementação de ciclos e como
operando.
DX – também chamado dados, guarda dados de uso geral.
Como mostra a figura acima, estes quatro registos podem ser acedidos como dois registos de
8 bits. A parte alta, isto é os 8 bits mais significativos identificados por *H e a parte baixa, os
8 bits menos significativos por *L. Assim em assembler segundo a sintaxe AT&T:
mov
mov
mov
$0, %ax
$0, %ah
$0, %al
; coloca um zero no registo de 16 bits ax
; coloca um zero no parte alta de ax
; coloca um zero no parte baixa de ax
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 4/12
Periféricos e Interfaces
had
Abaixo apresenta-se um exemplo de acesso indexado a um espaço de memória contíguo, por
exemplo um array. Este segmento de código coloca zeros num conjunto de 10 posições de
memória. São apresentadas duas versões de acordo com a sintaxe AT&T e a sintaxe INTEL:
AT&T syntax
INTEL syntax
mov
mov
$10, %cx
$address, %bx
mov
inc
dec
jnz
$0, (%bx)
%bx
%cx
loop
loop:
mov
mov
cx, 10
bx, address
mov
inc
dec
jnz
0, [bx]
bx
cx
loop
; offset of array
loop:
Nota: Para se embeber código assembler no código fonte C, compilado com gcc, deve ser
usada a sintaxe AT&T.
2.3.1.2.2
Registos de segmento e de offset
Os registos CS, DS, SS e ES. Endereçam o inicio de um segmento de memória de 64 KBytes.
Como já visto o endereço fisico é obtido multiplicado o valor nestes endereços por 16.
CS – também chamado de segmento de código. Em conjunto com o registo de offset IP ou
instruction pointer, indica o endereço da próxima instrução a ser executada:
CS:IP = CS*16+IP
DS – também chamado de segmento de dados. Associado ao registo de offset SI ou source
index é usado para acesso dados.
DS:SI
SS – também chamado de segmento do stack ou da pilha. Associado ao registo de offset SP
ou stack pointer, indica o topo do stack.
DS:0000H
DS:SP
base do stack
topo do stack
ES – também chamado de segmento extra. Permite acesso a posições de memória num
segmento normalmente de dados, quando associado ao registo de offset DI ou destination
index:
ES:SI
É assim comum organizar um programa em 3 segmentos de dados. Uma para o código, outro
para os dados e outro para a pilha. No entanto deste modo só se acede um máximo de
3*64KBytes de memória. Pode-se ainda usar o segmento extra de modo a aceder a
4*64KBytes de memória, isto é 256 KBytes de memória de um total de 1024 KBytes
endereçáveis.
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 5/12
Periféricos e Interfaces
had
Para aceder à restante memória pode-se manipular por exemplo o segmento de dados.
Supondo que é necessário guardar dados na memória numa quantidade superior à capacidade
de um segmento, por exemplo 32+64 KBytes, tem de se usar dois segmentos, por exemplo:
FFFFFH
Segmento da pilha
Memória disponível
38000H
30000H
Segmento de dados B (32 Kbytes)
Memória disponível
1FFFFH
Segmento de dados A (64 KBytes)
10000H
Segmento de código
00000H
Se DS = 1000H para aceder ao segmento de dados A, então deverá ter o valor DS = 3000H
para que se possa aceder aos dados no segmento B. (Repare-se que os endereços físicos são
obtidos multiplicado o conteudo do registo de segmento por 16, isto é 10H.) No entanto o
conjunto de instruções do 8086 não permite que manipulação directa dos registos de
segmentos, tal como:
mov
$3000H, %ds ; erro
É no entanto possível colocar o valor dos registos na pilha e recuperá-los. Tal é efectuado pelo
scheduler de um sistema operativo multi-tarefa quando troca o processo que vai usar o CPU.
deste modo é possível alterar DS para apontar o segmento de dados B do seguinte modo:
mov
push
pop
$3000H, %ax
%ax
%ds
2.3.1.2.3
Registo de flag
Consiste numa colecção de bits (flags) de estado e controlo do sistema: 6 flags de estado e 3
de controlo. 7 bits não são usados. Algumas flags de uso comum são a carry flag (CF) e a zero
flag (ZF). A principal uso da primeira é assinalar quando o resultado de uma operação
excedeu a gama de valores dos dados. A segunda quando o resultado de uma operação foi
zero.
2.3.1.3
Armazenamento de dados na memória
A contrário dos registos, os valores de 16 bits, também chamados words, são guardados na
memória segundo segundo uma organização chamada little endian, onde o byte menos
significativo é colocado na posição de memória mais baixa. A mesma organização é usada
para valores de 32 bits, as double words. Oposto a esta têm-se a organização big endian
onde o armazenamento é efectuado ao contrário.
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6 T02 - 6/12
Periféricos e Interfaces
had
Assim o número A02BH será guardado na memória como:
Endereço de memória
valor
00F05H
A0H
00F04H
2BH
00F03H
??
00000H
??
A02BH
Embora os compiladores e interpretadores tornem a organização de memória transparente
para o programador, quando se programa em assembler é preciso tomar tal em atenção.
2.3.2 Evolução do 8086
Os processadores apresentados a seguir são evoluções do 8086. Cada novo processador
acrescenta inovações tecnológicas em relação ao seu predecessor, mantendo a
compatibilidade com todos os anteriores. A seguir apresenta-se um resumo das principais
inovações relativamente ao modelo anterior:
2.3.2.1
80186/88
O 80186 e 80188 diferem no mesmo que o 8086 para o 8088: o 80186 tem um bus de dados
de 16 bits e o 80188 tem um bus de dados de 8 bits. No chip deste processador foi no entanto
adicionado, em relação ao 8086/88:
- um controlador de interrupções
- um controlador DMA
- um timer.
O conjunto de instruções é maior e foi optimizado para melhorar o desempenho.
2.3.2.2
80286
O bus de endereços é de 24 bits o que permite endereçar 16 MBytes de memória (224 bytes).
Foi o primeiro processador da Intel a funcionar em modo protegido, isto é o acesso à memória
pode ser protegido como será descrito mais adiante. Esta característica é bastante utilizada nos
sistemas operativos actuais para impedir que programas em modo de utilizador possam aceder
à memória do kernel (ou núcleo do sistema operativo) garantindo assim a integridade do
sistema. Para operar em modo protegido tem mais 5 registos.
Em modo real, funciona como o 8086, acedendo apenas a 1 MByte de memória.
2.3.2.3
80386
O 80386 foi o primeiro microprocessador de 32 bits a ser usado nos PC’s em finais dos anos
80 do século passado. As principais inovações são:
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 7/12
Periféricos e Interfaces
had
- Registos de 32 bits
- Bus de dados de 32 bits
- Bus de endereços de 32 bits, o que permite endereçar 4 GBytes de memória (232 bytes).
- Prefetch queue de 16 bytes.
- Unidade de gestão de memória com suporte para segmentação e paginação.
- Tem mais 4 registos de controlo para o modo protegido e 8 registos de debug no modo
protegido e modo virtual 8086.
- Arquitectura em pipeline
As diferentes unidades do 386 podem, de certa forma operar em paralelo, uma vez que as
instruções são passadas por uma espécie de linha de montagem e tratadas por partes. Assim
durante a execução de uma instrução, a próxima instrução a ser executada é descodificada e a
instrução seguinte é colocada no prefetch queue. Consegue-se assim um paralelismo que
optimiza o desempenho.
- Modo virtual 8086
O modo virtual 8086, permite emular múltiplas máquinas virtuais 8086 com 1 MByte de
memória cada, sendo os endereços físicos de 1 MByte mapeados para qualquer zona dos 4
GBytes. Assim um sistema operativo multitarefa pode executar vários programas feitos para o
8086, cada um com o seu 1 MBytes independente. O modo virtual 8086 surgiu porque na
altura do aparecimento do 80386, ainda havia muitos programas a correr sobre o MS-DOS,
que é um sistema operativo que necessita de se executar em modo real.
O modo virtual 8086 é usado, por exemplo, por uma janela de MSDOS a correr sobre o
Windows, de modo que múltiplas janelas MSDOS emulam múltiplos sistemas 8086
concorrentes. No linux é usado no emulador de DOS: DOSEMU.
- Modo protegido
Foi originalmente implementado no 80286 para proteger de acessos inválidos e incorrectos as
diferentes tarefas num sistema operativo multitarefa (OS/2, Linux, Windows NT, Windows
2000). Para conseguir isso, o hardware do processador verifica todos os acessos aos dados e
ao código feitos por um programa e utiliza 4 níveis de privilégios para fornecer direitos de
acesso.
De um modo simplificado, o cálculo do endereço de memória físico a partir do endereço
lógico, no modo protegido, segue o diagrama seguinte:
Fig. 2-4: Cálculo do endereço físico no modo protegido (segmentos)
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 8/12
Periféricos e Interfaces
had
O endereço lógico é formado por um selector guardado num registo de segmento, DS para o
segmento de dados, e um offset. O selector indica o descriptor de segmento na tabela de
descriptores. Esta normalmente reside na memória baixa e pode ser inicializada pelo sistema
operativo no boot.
No descriptor seleccionado existe informação sobre o endereço de base do segmento, bem
como a protecção deste. O offset é então somado ao endereço de base para se obter o
endereço físico.
O 80386 permite ainda indexar a memória através de páginas. Neste caso o endereço lógico é
transformado num endereço linear, composto por 3 campos:
DIR
PÁGINA
OFFSET
Directório de páginas
Tabela de páginas
Página de memória
entrada
entrada
endereço fisíco
Fig. 2-5: Cálculo do endereço físico no modo protegido (páginas)
O campo DIR indica uma entrada no directório de páginas. Essa entrada indica uma tabela de
páginas. Usando o campo Página acede-se a uma outra entrada, agora na tabela de página, que
indica a posição da página na memória física. Somando o OFFSET ao endereço base da
página têm-se o endereço físico.
De um modo geral, os registos de 32 bits mantém o nome dos anteriores precedidos por um e
de extended. Assim para colocar valores de 32 bits no acumulador pode-se usar a seguinte
sintaxe:
mov
$F000A000H, %eax
O programa seguinte exemplifica uma chamada ao sistema operativo Linux para imprimir
uma string na consola, em código assembler de 32, embebido em código ANSI C.
Neste simples exemplo, as variáveis partilhadas pelo código C e assembler são globais. Se
não fôr esse o caso ter-se-á de usar outra técnica para partilhar variáveis entre o código C e
assembler:
/* Global variables*/
char msg[]="Hello, world!\n";
int len=15;
int main() {
asm (
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 9/12
Periféricos e Interfaces
had
"movl
"movl
"movl
"movl
"int
);
return 0;
}
len, %edx
$msg, %ecx
$1, %ebx
$4, %eax
$0x80
#message length\n"
#pointer to message to write\n"
#file handle (stdout)\n"
#system call number (write)\n"
#call kernel\n"
2.3.2.4
80486
O 80486 consiste num processador 386 melhorado, tendo sido o primeiro processador da Intel
a incluir um coprocessador matemático no próprio chip. Os processadores anteriores podiam
utilizar um coprocessador matemático, que consistia noutro chip colocado num slot especifico
da motherboard.
CPU
coprocessador
8086/88
8087
80186/88
8087
80286
80287
80386
80387
Incluí ainda memória cache de 8 KBytes, para código e dados, no chip.
2.3.2.5
Pentium
É um processador de 32 bits, superescalar, o que significa que pode executar mais de uma
instrução por ciclo de relógio. Para isso contém:
- Dois pipelines de inteiros e um pipeline floating-point, que em determinadas circunstâncias
conseguem executar duas instruções no mesmo ciclo de relógio.
- Duas caches separadas (uma para código e outra para dados) com 8 KBytes cada uma.
- Bus de dados externo de 64 bits.
2.3.2.6
Pentium Pro
- Cache adicional para código montada na motherboard (L2), e ligada directamente ao CPU,
com capacidade de 256 ou 512 KBytes.
- Bus de endereços de 36 bits, para um espaço físico de endereçamento de 64 GBytes.
- Permite multiprocessamento com 2 ou 4 processadores Pentium Pro, sem lógica adicional.
2.3.2.7
Pentium II
Basicamente consiste num Pentium PRO com suporte para a tecnologia MMX já existente no
Pentium MMX. MMX significa multimedia extensions, e consiste num conjunto de instruções
dedicado para implementação de aplicações multimedia e 3D.
A principal característica deste tipo de aplicações é que operam sobre uma grande de
pequenos pacotes de dados, por exemplo a manipulação de bits numa imagem 3D. A
arquitectura MMX permite recolher uma série de pacotes de dados e processar uma mesma
instrução em todos esses dados ao mesmo tempo (SIMD – single instruction multiple data).
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 10/12
Periféricos e Interfaces
had
2.3.2.8
Pentium III
Consiste num desenvolvimento do Pentium II com um maiot conjunto de instruções, que
incluem uma versão estendida das instruções MMX presentes no Pentium II.
Foi também optimizado desempenho da FPU. Os registos passam a ter u comprimento de 128
bits. Dispõe também de um pipeline com 10 estágios
2.3.2.9
AMD Athlon (K7)
Normalmente é mais rápido que um Pentium III para a mesma frequência de relógio. Dispõe
de 3 pipelines de inteiros independentes. O Cache no chip do processador tem uma
capacidade de 128 KBytes
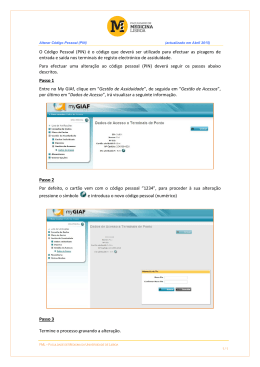
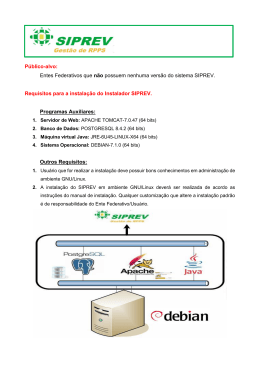
2.3.2.10 Pentium IV
Este processador é baseado na tecnologia Hyper-Threading, onde thread refere-se a uma série
de instruções. Dispõe de um pipeline com 20 estágios. Em alguns casos esta tecnologia
permite processar duas threads em simultâneo, de modo que o processador actua como dois
processadores virtuais. Deste modo num sistema operativo multitarefa é possível executar
dois processos em simultâneo.
O desenvolvimento seguinte consiste num chip com dois núcleos de modo que cada um pode
actuar como dois processadores virtuais sendo possível processar 4 threads em simultâneo.
Exemplo de processadores dual core são o AMD Opteron e o Intel Pentium ”Smithfield”.
Fig. 2-6: Processador dual core com Hyper Threading
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 11/12
Periféricos e Interfaces
had
2.4 Bibliografia
Costa, Ana Paula e José Bastos (2004, 2005) “Resumos das aulas teóricas de Periféricos e
Interfaces 2004-2005 “, http://www.deei.fct.ualg.pt/PIn_2005/Anuncios/
Karbo, Michael (2005). “PC Architecture”, http://www.karbosguide.com
Messmer, Hans-Peter (2002). “The Indispensable PC Hardware Book 4th edition”, AddisonWesley
Tischer, Michael e Bruno Jennrich, (1996). “PC Intern - The Encyclopedia of System
Programming 6th edition”, Abacus
http://w3.ualg.pt/~hdaniel/pin
PIN 2005-6
T02 - 12/12
Baixar