Agradecimentos
Ao Professor Doutor Manuel João Sepúlveda Mesquita de Freitas, pela orientação,
apoio e disponibilidade demonstrados ao longo do desenvolvimento deste trabalho.
Aos meus colegas e amigos de laboratório, João Pedro Monteiro, Eduardo Costa,
Marcos Pereira, Daniel Costa e Luís Pacheco pela amizade, pelo apoio, pela companhia
e interesse no desenvolvimento deste trabalho.
Aos sempre amigos André Nogueira e João Pedro Tinoco pela ajuda sempre pronta
que apresentaram em diversos momentos do desenvolvimento da dissertação.
À minha grande amiga Marta Alves pela sua importante ajuda na tradução do
resumo deste trabalho.
Aos técnicos do Departamento de Electrónica pela sua disponibilidade, simpatia e
ajuda.
Às empresas Microchip, Vishay e National Semiconductor pelo envio de amostras
gratuitas imprescindíveis para a implementação do trabalho.
Ao meu irmão, Ricardo Silva, e sua esposa, Paula Martins, por todo o apoio.
À minha namorada, Verónica Mendes pelo incentivo e apoio demonstrados.
Os maiores agradecimentos aos meus Pais, Fernando e Margarida Silva, por tudo
aquilo que me proporcionaram ao longo da minha vida. Pelo esforço feito em
determinados momentos, para que fosse possível frequentar um curso superior. Pelo
amor, pelo carinho e ajuda, Muito Obrigado.
iii
Resumo
Na produção de energia eléctrica o uso de alternadores trifásicos está normalmente
presente, onde a conversão de energia mecânica em energia eléctrica faz-se a partir da
interacção entre campos magnéticos existentes no seu funcionamento. Na constituição
do alternador aparecem duas partes distintas, o estator onde é alojado o enrolamento do
induzido e o rotor que acolhe o enrolamento do indutor. O enrolamento do indutor é
percorrido por uma corrente contínua de modo a proceder à excitação do alternador,
criando o campo magnético principal que, quando em movimento, induz forças
electromotrizes no enrolamento do induzido, desenvolvendo desta forma sistemas de
tensões.
Para a excitação do alternador existem diversas topologias, sendo escolhida a mais
conveniente dependendo do tipo de produção e instalação. Dos sistemas de excitação
destacam-se o sistema de excitação rotativo em corrente contínua, o sistema de
excitação rotativo em corrente alternada e o sistema de excitação estático, sendo o
último o mais usado. O sistema de excitação, qualquer que seja a sua topologia, tem por
objectivo proporcionar a excitação do alternador, injectando corrente contínua no
enrolamento do indutor, controlando-a de forma a manter a tensão gerada pelo sistema
com amplitude constante e alcançar a parte da potência reactiva apropriada entre
geradores que funcionem em paralelo. Tem ainda tarefas tais como, prevenir sobrecarga
térmica do gerador, evitar sub-excitação que proporcionaria perda de sincronismo,
acautelar sobre-excitação que poderia danificar os enrolamentos do induzido e proceder
à desexcitação do alternador em caso de paragem de produção.
No sistema de excitação estático, sistema adoptado neste trabalho, as tensões
necessárias para a excitação são obtidas nos terminais do alternador. Para o inicio da
produção, a energia remanescente tem um papel fundamental, pois é a partir desta que
se consegue a pré-excitação do alternador. Na constituição do sistema de excitação
estático proposto destacam-se, o conversor flyback que controla a corrente de excitação
e o microcontrolador, que procede à regulação da tensão através do controlador PI.
Serão apresentados neste trabalho os diversos elementos que constituem o sistema
de excitação, os esquemas dos circuitos de controlo e potência e o algoritmo de controlo
proposto, assim como todos os resultados obtidos.
Palavras-Chave: Alternador, Sistemas de Excitação, Regulador de Tensão
v
Abstract
In the generation of electric energy, three-phase alternators are a common use,
where the conversion of mechanical energy to electric energy is made from the
interaction between the existing magnetic fields. The alternator is composed of two
distinct parts: the stator, where the winding of the induced is stored and the rotor, that
takes the winding of the inductor. The winding of the inductor is fed by a direct current
to excite the alternator, creating the main magnetic field that, when moving,
electromotive forces are generated on the winding of the induced, therefore creating
system voltages.
There are various ways to excite the alternator and the most convenient one is
chosen for its production and installation form. The main excitation systems are the
direct current and alternating current rotating excitation systems as well as the static
excitation system, which is used the most. Despite its topology, the excitation system
excites the alternator by injecting a direct current in the winding of the inductor,
controlling it as to maintain the voltage generated by the system at a constant level, as
well as to reach the appropriate reactive power between the parallel generators. It also
prevents the thermal overload of the generator, avoids its sub-excitation that can lead to
loss of synchronism, inhibits the super-excitation that can damage the winding of the
induced and it de-excites the alternator in case the production ceases.
In the static excitation system, the system adopted in the present work, the voltage
needed for the excitation is obtained in the alternator’s terminal. The remaining energy
is very important to start the process, since it allows the pre-excitation of the generator.
The proposed static excitation system is based on the flyback converter, which controls
the excitation current and the microcontroller, which regulates the voltage through a PI
controller.
The various constituents of the excitation system, the diagrams of the controller and
power circuits, as well as the proposed control algorithm are presented, along with the
results.
Keywords: Alternator, Excitation Systems, Voltage Regulator
vii
Índice
Agradecimentos ............................................................................................................. iii
Resumo ............................................................................................................................ v
Abstract ......................................................................................................................... vii
Índice .............................................................................................................................. ix
Índice de Figuras ......................................................................................................... xiii
Lista de Símbolos Siglas e Acrónimos ....................................................................... xix
Capítulo 1 - Introdução .................................................................................................. 1
1.1
Descrição do Problema .................................................................................................. 1
1.2
Enquadramento .............................................................................................................. 2
1.3
Motivação do Trabalho .................................................................................................. 2
1.4
Objectivos do Trabalho.................................................................................................. 3
1.5
Organização da Dissertação ........................................................................................... 3
Capítulo 2 - Máquina Síncrona e Sistemas de Excitação ............................................ 5
2.1
Descrição da Máquina Síncrona .................................................................................... 5
2.2
Partes Construtivas da Máquina Síncrona ..................................................................... 6
2.2.1
Estator da Máquina Síncrona .................................................................................... 6
2.2.2
Rotor da Máquina Síncrona....................................................................................... 7
2.3
Princípio de Funcionamento da Máquina Síncrona ....................................................... 8
2.3.1
Funcionamento como Motor Síncrono ...................................................................... 8
2.3.2
Compensador Síncrono ............................................................................................. 9
2.3.3
Gerador Síncrono ou Alternador ............................................................................. 10
2.4
Potência da Máquina Síncrona .................................................................................... 12
2.5
Excitação do Alternador .............................................................................................. 14
2.5.1
Sistemas de Excitação do Alternador ...................................................................... 14
2.5.2
Sistema de Excitação Estático ................................................................................. 15
2.5.3
Considerações na Escolha do Sistema de Excitação ............................................... 16
Capítulo 3 - Constituição e Controlo do Sistema de Excitação Estático.................. 19
3.1
Divisão do Sistema de Excitação Estático ................................................................... 19
3.1.1
Transformador de Excitação ................................................................................... 19
3.1.2
Pré-Excitação do Alternador ................................................................................... 20
3.1.3
Conversor de Potência ............................................................................................. 20
ix
3.1.4
Desexcitação do Alternador .................................................................................... 21
3.1.5
Regulador Automático de Tensão ........................................................................... 22
3.1.5.1
Tipos de Reguladores de Tensão ......................................................................... 22
3.1.5.2
Tipos de Unidade de Medida............................................................................... 23
3.1.5.3
Tipos de Unidade de Regulação .......................................................................... 24
3.1.6
Controlo Protecção e Medida do Sistema de Excitação .......................................... 24
3.1.6.1
Controlo do Sistema de Excitação....................................................................... 24
3.1.6.2
Protecção do Sistema de Excitação ..................................................................... 25
3.1.6.3
Medida do Sistema de Excitação......................................................................... 25
3.2
Controlador Proporcional-Integral-Derivativo (PID) .................................................. 26
3.2.1
Acção Proporcional ................................................................................................. 27
3.2.2
Acção Proporcional-Integral ................................................................................... 28
3.2.3
Acção Proporcional Derivativa ............................................................................... 29
3.2.4
Acção Proporcional-Integral-Derivativa (PID) ....................................................... 29
3.3
Reguladores Automáticos de Tensão no Mercado....................................................... 30
3.3.1
Regulador R231 da Leroy Somer ............................................................................ 30
3.3.2
Regulador Unitrol 1000 da ABB .............................................................................. 31
3.3.3
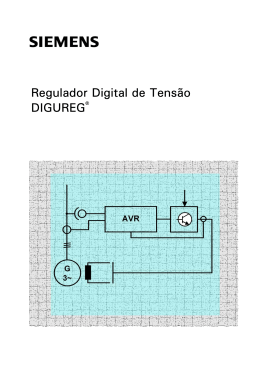
Regulador Digureg da Simens ................................................................................. 32
Capítulo 4 - Conversores Electrónicos de Potência ................................................... 35
4.1
Conversores CA/CC .................................................................................................... 35
4.1.1
Rectificador Monofásico Não Controlado em Ponte Completa .............................. 35
4.1.2
Rectificador Monofásico Semi-Controlado............................................................. 37
4.1.3
Rectificador Monofásico Totalmente Controlado ................................................... 38
4.1.4
Rectificador Trifásico Não Controlado em Ponte Completa ................................... 40
4.1.5
Rectificador Trifásico Semi-Controlado ................................................................. 42
4.1.6
Rectificador Trifásico Totalmente Controlado ........................................................ 44
4.2
Valor Médio da Tensão de Saída dos Rectificadores .................................................. 45
4.3
Topologia dos Conversores de Corrente Contínua ...................................................... 46
4.4
Conversores CC-CC sem isolamento .......................................................................... 46
4.4.1
Conversor Step-Down ............................................................................................. 46
4.4.2
Conversor Step-Up .................................................................................................. 47
4.4.3
Conversor Step-Up/Step-Down ............................................................................... 48
4.5
Conversores CC-CC com Isolamento .......................................................................... 48
4.5.1
Conversor Flyback .................................................................................................. 49
4.5.2
Conversor Forward ................................................................................................. 50
x
Capítulo 5 - Implementação do Regulador da Corrente de Excitação do Alternador
........................................................................................................................................ 55
5.1
Descrição do Sistema Desenvolvido............................................................................ 56
5.2
Circuito de Potência do Sistema de Excitação ............................................................. 56
5.2.1
Transformador de Excitação ................................................................................... 57
5.2.2
Rectificador Monofásico ......................................................................................... 58
5.2.3
Conversor Flyback .................................................................................................. 59
5.3
Circuito de Comando do Sistema de Excitação ........................................................... 61
5.3.1
Unidade de Medida ................................................................................................. 62
5.3.1.1
Sensor de Tensão de Efeito Hall ......................................................................... 63
5.3.1.2
Sensor de Corrente de Efeito Hall ....................................................................... 63
5.3.1.3
Circuito de Condicionamento de Sinal ................................................................ 64
5.3.2
Unidade de Controlo ............................................................................................... 66
5.3.3
Microcontrolador do Sistema Implementado .......................................................... 67
5.4
Alimentação do Circuito de Comando ......................................................................... 72
5.5
Algoritmo de Controlo do Sistema Implementado ...................................................... 74
5.5.1
Pré-Excitação do Alternador ................................................................................... 75
5.5.2
Controlo em Malha Fechada da Tensão de Saída ................................................... 76
5.6
Descrição do Sistema de Excitação Completo............................................................. 79
Capítulo 6 - Resultados Experimentais do Regulador Implementado..................... 81
6.1
Resultados do Circuito de Potência ............................................................................. 81
6.1.1
Rectificador Monofásico com Filtro Capacitivo ..................................................... 81
6.1.2
Conversor Flyback .................................................................................................. 82
6.1.3
Consumos do Circuito de Potência ......................................................................... 83
6.2
Resultados do Circuito de Comando ........................................................................... 84
6.2.1
Unidade de Medida ................................................................................................. 84
6.2.2
Unidade de Controlo ............................................................................................... 85
6.3
Resultados da Alimentação do Circuito de Comando ................................................. 86
6.3.1
Circuito de Medida/Microcontrolador..................................................................... 87
6.3.2
Circuito de Controlo ................................................................................................ 87
6.4
Resultados do Algoritmo de Controlo ......................................................................... 88
6.5
Resultados da Interface Sistema-Utilizador ................................................................. 89
6.5.1
Inicialização e Finalização do Processo de Geração ............................................... 89
6.5.2
Alteração do Valor de Referência ........................................................................... 91
xi
6.6
Mensagem de Erro do Sistema .................................................................................... 92
Capítulo 7 - Conclusões e Sugestões de Trabalho Futuro ......................................... 93
7.1
Conclusões ................................................................................................................... 93
7.2
Propostas de Trabalho Futuro ...................................................................................... 95
Referências Bibliográficas ........................................................................................... 97
ANEXOS ..................................................................................................................... A-1
ANEXO A - Circuito de Potência ........................................................................................... A-3
ANEXO B - Circuito da Unidade de Medida ......................................................................... A-5
ANEXO C - Circuito da Unidade de Controlo ....................................................................... A-7
ANEXO D - Circuito do Microcontrolador ............................................................................ A-9
ANEXO E - Circuitos de Alimentação da Unidade de Comando ......................................... A-11
ANEXO F - Código Implementado ...................................................................................... A-13
xii
Índice de Figuras
Figura 2.1 – Aspecto de uma máquina síncrona de baixa potência [3] ............................ 5
Figura 2.2 – Partes constituintes da máquina síncrona [6] ............................................... 6
Figura 2.3 – Estator da máquina síncrona [7] ................................................................... 7
Figura 2.4 - Rotor da máquina síncrona clássica: (a) pólos salientes (b) pólos lisos [5] . 7
Figura 2.5 – Interacção dos campos magnéticos no motor síncrono [4] .......................... 8
Figura 2.6 – Circuito equivalente do motor síncrono [4] ................................................. 9
Figura 2.7 – Representação vectorial do funcionamento do motor síncrono [5] ............. 9
Figura 2.8 – Funcionamento do compensador síncrono (a) motor funcionando como um
sistema com carga capacitiva ideal (b) motor funcionando como um sistema com carga
indutiva ideal [5]............................................................................................................. 10
Figura 2.9 – Curva de magnetização do alternador funcionando em vazio [11] ............ 11
Figura 2.10 – Circuito equivalente do alternador [4] ..................................................... 12
Figura 2.11 – Diagrama vectorial do alternador: (a) sobreexcitado (b) sub-excitado ... 12
Figura 2.12 – Triângulo de potências num sistema eléctrico sinusoidal ........................ 13
Figura 2.13 - Elementos de excitação de um alternador de baixa potência: (a) Anéis
Colectores (b) Escovas ................................................................................................... 14
Figura 2.14 – Excitatriz principal com controlo do reóstato de campo [13] .................. 15
Figura 2.15 – Sistema de excitação estático [14] ........................................................... 16
Figura 3.1 – Transformador de excitação do sistema de excitação estático ................... 20
Figura 3.2 – Diagrama de bloco de um conversor a tiristores [9] .................................. 21
Figura 3.3 – Diagrama de blocos do sistema de desexcitação [9] .................................. 21
Figura 3.4 – Representação do regulador de tensão aplicado ao sistema de excitação
estático ............................................................................................................................ 22
Figura 3.5 – Curva de capabilidade do alternador [4] .................................................... 26
Figura 3.6 – Diagrama de blocos do controlador PID [16] ............................................ 27
Figura 3.7 – Representação do controlador proporcional (P) [18] ................................. 27
Figura 3.8 – Representação do controlador proporcional-integral (PI) [18] .................. 28
xiii
Figura 3.9 – Representação do controlador proporcional-derivatico (PD) [18] ............. 29
Figura 3.10 – Representação do controlador proporcional-integral-derivativo (PID) ... 29
Figura 3.11 – Resposta esperada do controlador PID [16] ............................................. 30
Figura 3.12 – Regulador R231 da Leroy Somer ............................................................. 30
Figura 3.13 – Regulador Unitrol 1000 da ABB [19] ...................................................... 31
Figura 3.14 – Regulador Digureg da Siemens [20] ........................................................ 33
Figura 4.1 – Rectificador monofásico: (a) sem filtro (b) filtro capacitivo (c) filtro
indutivo ........................................................................................................................... 35
Figura 4.2 – Formas de onda da tensão na entrada e saída do rectificador monofásico
não controlado sem filtro ................................................................................................ 36
Figura 4.3 - Formas de onda da tensão de entrada e saída do rectificador monofásico não
controlado com filtro capacitivo ..................................................................................... 36
Figura 4.4 - Formas de onda da tensão de entrada e saída do rectificador monofásico não
controlado com filtro indutivo ........................................................................................ 36
Figura 4.5 – Ponte rectificadora monofásica semi-controlada: (a) sem filtro (b) filtro
capacitivo (c) filtro indutivo ........................................................................................... 37
Figura 4.6 – Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico semi-controlado sem filtro para um ângulo de 90º ..................................... 37
Figura 4.7 - Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico semi-controlado com filtro capacitivo para um ângulo de disparo dos
tiristores de 90º ............................................................................................................... 38
Figura 4.8 - Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico semi-controlado com filtro indutivo para um ângulo de disparo dos
tiristores de 90º ............................................................................................................... 38
Figura 4.9 – Ponte rectificadora monofásica totalmente controlada: (a) sem filtro (b)
filtro capacitivo (c) filtro indutivo .................................................................................. 39
Figura 4.10 – Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico totalmente controlado sem carga do lado CC para um ângulo de 120º ...... 39
Figura 4.11 - Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico totalmente controlado com filtro capacitivo para um ângulo de 120º ........ 39
xiv
Figura 4.12 - Formas de onda da tensão e corrente de entrada e saída do rectificador
monofásico totalmente controlado com filtro indutivo para um ângulo de 120º ........... 40
Figura 4.13 - Ponte rectificadora trifásica não controlada: (a) sem filtro (b) filtro
capacitivo (c) filtro indutivo ........................................................................................... 40
Figura 4.14 – Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico não controlado sem filtro do lado CC .............................................................. 41
Figura 4.15 - Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico não controlado com filtro capacitivo ................................................................ 41
Figura 4.16 – Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico não controlado com filtro indutivo ................................................................... 42
Figura 4.17 - Ponte rectificadora trifásica semi-controlada: (a) sem filtro (b) filtro
capacitivo (c) filtro indutivo ........................................................................................... 42
Figura 4.18 - Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico semi-controlado sem filtro para um ângulo de disparo de 120º ....................... 43
Figura 4.19 - Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico semi-controlado com filtro capacitivo para um ângulo de disparo de 90º ....... 43
Figura 4.20 - Formas de onda da tensão e corrente de entrada e saída do rectificador
trifásico semi-controlado com filtro indutivo para um ângulo de disparo de 120º ........ 44
Figura 4.21 - Rectificador trifásico totalmente controlado com filtro indutivo ............. 44
Figura 4.22 - Formas de onda da tensão e corrente de saída do rectificador totalmente
controlado com filtro indutivo com um ângulo de disparo de 30º ................................. 45
Figura 4.23 - Formas de onda da tensão e corrente de saída do rectificador totalmente
controlado com filtro indutivo para um ângulo de disparo de 60º ................................. 45
Figura 4.24 – Conversor Step-Down .............................................................................. 47
Figura 4.25 – Conversor Step-Up ................................................................................... 47
Figura 4.26 – Conversor Step-Up/Step-Down ................................................................ 48
Figura 4.27 – Conversor flyback nos estados: (a) semicondutor Q1 conduz (b)
semicondutor Q1 não conduz [22].................................................................................. 49
Figura 4.28 – Formas de onda do conversor Flyback [22] ............................................. 50
Figura 4.29 – Conversor Forward ideal [22] ................................................................. 51
Figura 4.30 – Conversor forward (representação prática) [22] ...................................... 52
xv
Figura 4.31 – Conversor forward representado com o circuito equivalente do
transformador [22] .......................................................................................................... 52
Figura 4.32 – Formas de onda do conversor forward [22] ............................................. 53
Figura 5.1 - Alternador HCM434D da Stamford acoplado ao motor de combustão ...... 55
Figura 5.2 – Diagrama de blocos simplificado do sistema de excitação implementado 56
Figura 5.3 – Circuito de potência com todos os elementos constituintes ....................... 57
Figura 5.4 – Transformador de excitação utilizado ........................................................ 57
Figura 5.5 - Rectificador monofásico implementado ligado a metade do enrolamento do
induzido .......................................................................................................................... 58
Figura 5.6 – Montagem do rectificador monofásico com filtro capacitivo .................... 58
Figura 5.7 – Área da janela (
) e área da secção transversal (
) do núcleo de ferrite
do transformador do conversor flyback [24]................................................................... 60
Figura 5.8 – Esquema do circuito do conversor flyback implementado......................... 61
Figura 5.9 – Circuito do conversor flyback implementado ............................................ 61
Figura 5.10 – Diagrama de blocos do circuito de comando ........................................... 62
Figura 5.11 – Placa da unidade de medida do circuito de comando .............................. 62
Figura 5.12 – Sensor de tensão de efeito Hall LV 25-P da LEM [26] ............................ 63
Figura 5.13 - Sensor de corrente de efeito Hall LA 55-P da LEM [27].......................... 64
Figura 5.14 – Circuito de condicionamento de sinal implementado [28] ...................... 65
Figura 5.15 – Placa do circuito de condicionamento de sinal ........................................ 66
Figura 5.16 – Diagrama funcional do driver HCPL-3120 [29] ...................................... 66
Figura 5.17 – Esquema do circuito de controlo implementado [29] .............................. 67
Figura 5.18 – Circuito de drive entre o circuito de comando e o circuito de potência ... 67
Figura 5.19 – Diagrama de blocos da utilização do microcontrolador ........................... 68
Figura 5.20 – Programador e depurador ICD2 ............................................................... 69
Figura 5.21 – Ambiente da ferramenta de programação MPLAB ................................. 70
Figura 5.22 – Esquema eléctrico da placa do microcontrolador PIC18F4331 ............... 70
Figura 5.23 – Desenho da placa de circuito impresso do microcontrolador PIC18F4331
e respectivas entradas e saídas ........................................................................................ 71
xvi
Figura 5.24 – Circuito do microcontrolador implementado ........................................... 71
Figura 5.25 – Circuito de alimentação do circuito do microcontrolador e préalimentação do circuito de medida ................................................................................. 72
Figura 5.26 – Circuito típico do IC MAX743CPE [32] ................................................. 73
Figura 5.27 – Desenho das placas de circuito impresso: (a) alimentação do circuito de
medida e microcontrolador, (b) alimentação do circuito de controlo ............................ 74
Figura 5.28 – Placas de alimentação do circuito de comando: (a) circuito de medida e
microcontrolador (b) circuito de controlo ...................................................................... 74
Figura 5.29 – Fluxograma da pré-excitação do alternador ............................................. 76
Figura 5.30 – Diagrama de blocos do controlador PI implementado ............................. 76
Figura 5.31 – Fluxograma do controlador PI do sistema de regulação .......................... 77
Figura 5.32 – Fluxograma do funcionamento do interface com o utilizador ................. 78
Figura 5.33 – Diagrama de blocos do sistema completo ................................................ 79
Figura 5.34 – Regulador da corrente de excitação implementado completo.................. 79
Figura 6.1 – Tensão no secundário do transformador e saída do rectificador monofásico
........................................................................................................................................ 82
Figura 6.2 – Tensão na entrada e saída do conversor flyback ........................................ 82
Figura 6.3 – Tensão no semicondutor quando em comutação (
) ............................ 83
Figura 6.4 – Valores na entrada do regulador da corrente de excitação: (a) Tensão e
corrente (b) Taxa de distorção harmónica ...................................................................... 83
Figura 6.5 – Medição do valor da corrente de excitação para 500 mA .......................... 84
Figura 6.6 – Medição do valor da corrente de excitação para 200 mA .......................... 84
Figura 6.7 – Medição do valor da tensão gerada (metade do enrolamento do induzido190 V) ............................................................................................................................. 85
Figura 6.8 – Medição do valor da tensão gerada (metade do enrolamento do induzido116 V) ............................................................................................................................. 85
Figura 6.9 – Sinal de PWM na saída do microcontrolador e aplicado ao MOSFET...... 86
Figura 6.10 – Tensão obtida para alimentação do circuito de medida/microcontrolador
........................................................................................................................................ 87
Figura 6.11 – Tensão obtida para alimentação do circuito de controlo .......................... 88
xvii
Figura 6.12 – Resposta do sistema ao controlador PI (colocação da corrente no valor de
referência) ....................................................................................................................... 89
Figura 6.13 - Resposta do sistema ao controlador PI a alterações da carga (a)Carga
aumenta (b) Carga diminui ............................................................................................. 89
Figura 6.14 – Valor da tensão retirada dos terminais do alternador antes do inicio do
processo .......................................................................................................................... 90
Figura 6.15 – Mensagem de inicio do processo ............................................................. 90
Figura 6.16 – Mensagem de fim de processo ................................................................. 91
Figura 6.17 – Mensagem de inicio de alteração do valor de referência ......................... 91
Figura 6.18 – Mensagem de fim de alteração do valor de referência ............................. 92
Figura 6.19 – Aviso de erro do sistema: (a) Sobreexcitação (b) Excesso de tensão nos
terminais do alternador ................................................................................................... 92
Figura A1 – Esquema eléctrico do circuito de potência ............................................... A-3
Figura B1 – Esquema eléctrico do circuito do sensor de tensão efeito Hall ................ A-5
Figura B2 – Esquema eléctrico do circuito somador .................................................... A-5
Figura B3 – Esquema eléctrico do circuito do sensor de corrente efeito Hall ............. A-6
Figura D1 – Esquema eléctrico do circuito do microcontrolador ................................ A-9
Figura
E1
–
Esquema
eléctrico
do
circuito
de
alimentação
unidade
de
medida/microcontrolador............................................................................................ A-11
Figura E2 – Esquema eléctrico do circuito de alimentação da unidade de controlo .. A-12
xviii
Lista de Símbolos Siglas e Acrónimos
THD
Resistência
I
Indutância
Transformador de Corrente
Capacidade
Transformador de Potencial
Tensão
Transformador de Excitação
Tensão do lado de corrente
Corrente Contínua
contínua
Corrente Alternada
Tensão eficaz
f.e.m.
Força electromotriz
Tensão de pico
MS
Motor síncrono
Tensão composta
CS
Compensador Síncrono
Corrente
GS
Gerador Síncrono
Corrente eficaz
CPU
Central Processing Unit
Corrente de pico
MOSFET Metal Oxide Semiconductor
Field Effect Transistor
Corrente de excitação
Corrente na linha
GND
Graduated neutral density
(ground)
f
Frequência
rms
Root mean square
AmpOp
Amplificador Operacional
PWM
Pulse Width Modulation
CAD
Conversor Analógico
Digital
Potência activa
LCD
Liquid Crystal Display
PID
Proporcional Integral
Derivativo
Potência reactiva
Potência aparente
cos(ø)
Total Harmonic Distortion
PI
Proporcional Integral
º
Graus
Cosseno do desfasamento
entre a tensão e a corrente
Unidades:
Volt
Ampere
Rotações por minuto
Watt
Tesla
Ω
Volt Ampere
Ohm
Volt Ampere Reactivo
Henry
segundos
Farad
xix
Cavalo
nano (
)
Horse Power
pico (
)
mili (
kilo (
micro(
)
)
xx
)
Regulador da Corrente de Excitação de um Alternador
Capítulo 1
Introdução
Neste capítulo será feita uma abordagem à utilização da máquina síncrona na
geração de energia e a sua aplicação no trabalho proposto. Também conhecido como
alternador, no funcionamento como gerador, a máquina síncrona deve apresentar
valores de tensão constantes aos seus terminais ao longo do tempo. Para tal o uso de
reguladores de tensão torna-se indispensável para o ajuste e regulação da tensão gerada.
Pretende-se assim, perceber quais as motivações e importância da implementação de um
sistema de excitação e respectivo regulador de tensão para ajuste da corrente de
excitação do alternador. Serão ainda apresentados os principais objectivos e estrutura da
dissertação.
1.1 Descrição do Problema
A necessidade da obtenção de valores de tensão constantes na produção de energia,
mesmo quando o número de cargas oscila, envolve o uso de métodos capazes de o fazer
de forma eficaz. O uso de reguladores de tensão, que controlam a corrente de excitação
automaticamente, torna o uso de alternadores para pequenas produções mais fiáveis e
capazes de fornecer tensões dentro dos valores pretendidos, de acordo com a capacidade
de produção.
Neste trabalho está inerente a necessidade de controlar a tensão de saída de um
alternador, para valores fixos, garantindo assim o funcionamento dos dispositivos que se
pretende alimentar (Sistemas de Ar Condicionado). A não utilização de todos os
mecanismos de ar condicionado ao mesmo tempo, faz com que, a tensão não se
mantenha nos mesmos valores, ou seja, sempre que aumenta ou diminui o número de
cargas ligadas no sistema, a corrente necessária aumenta ou diminui, fazendo a tensão
diminuir ou aumentar respectivamente. Este aumento ou diminuição da tensão tem um
efeito não desejado nas cargas levando ao seu mau funcionamento e até mesmo a
avarias, daí a necessidade de manter a tensão dentro dos valores nominais das cargas.
O sistema de regulação de tensão deve ser independente de qualquer fonte externa.
Tanto o campo como todo o sistema de controlo deve ser alimentado a partir dos
terminais do alternador. Para tal, torna-se necessário o aproveitamento da energia
remanescente do alternador que fará o inicio da produção de energia conseguindo
alimentar todo o sistema, onde a partir do momento que a tensão gerada fica dentro dos
valores nominais, o sistema inicia a regulação da corrente de excitação.
Universidade do Minho
1
Introdução
1.2 Enquadramento
Os alternadores representam o grupo de máquinas eléctricas mais usadas para
produção de energia eléctrica em todo o mundo. Desde as grandes centrais
hidroeléctricas, térmicas e nucleares até pequenas produções como, mini hídricas e
accionamento a partir de motores de combustão, o seu uso está associado. Os sistemas
de excitação são parte integrante nas instalações de produção de energia, eles alimentam
o enrolamento do indutor, alojado no rotor, surgindo daqui um campo magnético
constante. Quando em movimento, o campo do rotor induz forças electromotrizes no
enrolamento do induzido, acolhido pelo estator, criando desta forma sistemas de
tensões. A intensidade do campo magnético do indutor determina, para uma
determinada carga e velocidade, a tensão aos terminais do alternador. A corrente de
excitação criadora do campo do indutor, antes dos sistemas actualmente empregues, era
feita a partir de fontes de corrente contínua externas e controlada por um reóstato,
necessitando que um operador ajustasse o valor deste para alterações na tensão de
geração.
Na produção de energia, independentemente da potência, a tensão deve apresentar
valores constantes ao longo do tempo, ou seja, se o número de cargas, por algum
motivo, aumenta ou diminui, a tensão a elas aplicada deve permanecer inalterada. Os
reguladores de tensão controlam a corrente de excitação do alternador actuando sobre o
sistema de excitação empregue conseguindo desta forma, o valor da tensão pretendida
aos seus terminais. O surgimento de reguladores de tensão automáticos deveu-se à
evolução da electrónica de potência que proporcionou novos métodos de controlo da
corrente de excitação das máquinas síncronas.
1.3 Motivação do Trabalho
A principal motivação deste trabalho baseia-se no desenvolvimento do
conhecimento adquirido ao longo dos últimos anos no curso de Electrónica Industrial e
Computadores. O interesse e especialização na área de Electrónica de Potência levaram
à elaboração deste trabalho, onde foram aplicadas experimentalmente várias soluções
estudadas nas diferentes unidades curriculares. O controlo da corrente de excitação de
um alternador, com o intuito de regular a tensão de saída, necessita de vários elementos
de forma a criar o campo do alternador e controla-lo. A qualidade da geração de
energia, tanto em grande como em pequena escala, depende da qualidade e precisão dos
sistemas de excitação empregues. Como tal, o estudo acerca da melhor forma de
excitação e funcionamento tornou-se uma motivação, assim como perceber o
2
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
funcionamento da máquina síncrona, principal elemento na produção de energia
eléctrica.
1.4 Objectivos do Trabalho
Com este trabalho pretende-se desenvolver e implementar um regulador electrónico
capaz de manter a tensão aos terminais de um alternador trifásico de 200 kVA
380/220 V, alimentado a partir do induzido do próprio alternador. O regulador deverá
ser o mais fiável possível, e no caso de falha deve desligar a alimentação da excitatriz.
De modo a implementar o regulador são seguidos os seguintes passos:
Desenvolvimento de um rectificador trifásico alimentado a 190 V (tensão obtida
de meio enrolamento do estator) para alimentar o regulador;
Desenvolvimento de um conversor electrónico de potência para controlar a
corrente contínua aplicada à excitatriz do alternador (35 W, 51 V, máximo);
Desenvolvimento de um sistema de aquisição de dados das tensões do gerador e
de todas as protecções adequadas ao sistema;
Implementação de um sistema de controlo e respectivas interfaces;
Testes experimentais ao sistema completo.
1.5 Organização da Dissertação
Esta dissertação divide-se em sete capítulos. Pretende-se, em cada capítulo,
demonstrar cada etapa efectuada ao longo da realização deste trabalho sendo este divido
num primeiro estudo teórico e seguidamente a implementação prática do sistema
pretendido. Assim, a dissertação encontra-se organizada da seguinte forma:
No capítulo um faz-se uma pequena introdução do trabalho mostrando onde ele se
enquadra e quais as motivações que levaram à proposta deste trabalho. São ainda
apresentados os objectivos propostos para a realização do mesmo.
No segundo capítulo apresentam-se a máquina síncrona, a sua constituição e
princípio de funcionamento. Ainda neste capítulo faz-se um estudo teórico dos sistemas
de excitação existentes assim como a melhor aplicação para cada um deles, onde serão
apresentadas as diferentes características e princípios de funcionamento
No capítulo três obtém-se uma descrição do sistema de excitação estático, as partes
constituintes, o controlo e funcionamento. Para o controlo descreve-se neste capítulo o
controlador padrão nos sistemas de excitação (controlador PID). No final deste capítulo
faz-se um pequeno estado da arte de alguns reguladores de tensão existentes no
mercado.
Universidade do Minho
3
Introdução
Seguidamente, no capítulo quatro, é feito um resumo sobre os conversores de
electrónica de potência quer de corrente alternada quer de corrente contínua, mostrando
a sua constituição e princípio de funcionamento.
O quinto capítulo apresenta a implementação prática do trabalho realizado,
descrevendo cada bloco que compõe o regulador de tensão proposto.
No capítulo seis apresentam-se os resultados obtidos para a excitação do alternador.
No sétimo capítulo, são feitas as conclusões finais de todo o trabalho e apresentado
o que mais se poderá fazer como trabalho futuro.
4
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Capítulo 2
Máquina Síncrona e Sistemas de Excitação
Neste capítulo pretende-se mostrar a constituição da máquina síncrona assim como o
seu funcionamento para os diferentes modos de operação, sendo dada maior importância
ao funcionamento como gerador (alternador). Será ainda abordado o modo de excitação
a partir do sistema de excitação estático como forma de criar o campo do alternador
possibilitando a produção de energia eléctrica. Desta forma espera-se provar a
necessidade do uso de reguladores de tensão na produção de energia como forma de
obter níveis de tensão constantes ao longo do tempo, quer em grande como em pequena
escala.
2.1 Descrição da Máquina Síncrona
A máquina síncrona (Figura 2.1) pela sua versatilidade pode ser considerada, das
famílias de máquinas eléctricas, a mais importante. Esta versatilidade prende-se com o
facto de ser possível a sua utilização como Motor Síncrono (MS), Compensador
Síncrono (CS) e Gerador Síncrono (GS), este último também conhecido como
alternador.
Figura 2.1 – Aspecto de uma máquina síncrona de baixa potência [1]
Devido a aspectos construtivos, à falta de binário de arranque e ao seu maior custo,
quando comparadas com outras máquinas eléctricas, são actualmente mais utilizadas
como geradores. Como motores as máquinas síncronas são geralmente utilizadas para
altas potências (acima dos 600 CV) devido à característica de apresentar velocidade
garantida em função da frequência como se pode verificar a partir da equação 2.1, em
que
é a frequência de funcionamento e
o número de pólos da máquina [2].
(2.1)
Universidade do Minho
5
Máquina Síncrona e Sistemas de Excitação
Ao apresentar factor de potência regulável, a máquina síncrona tem a possibilidade
de funcionar como compensador síncrono, capaz de corrigir o factor de potência de uma
instalação em substituição de bancos de condensadores. A utilização da máquina
síncrona como gerador é patente nas centrais eléctricas independentemente do seu tipo
(hidroeléctrica, térmica, etc.). A energia eléctrica disponível na rede pública é na sua
maioria produzida por geradores síncronos, em que energia mecânica é convertida em
energia eléctrica. São ainda utilizados na geração de energia nas centrais de pequeno
porte, aqui o GS não está ligado a um grande sistema mas funciona de forma isolada.
2.2 Partes Construtivas da Máquina Síncrona
A máquina síncrona apresenta na sua constituição mecânica duas partes distintas. O
estator [Figura 2.2 (a)], constituído basicamente por uma “carcaça”, suporta um núcleo
de material ferro-magnético no qual se encontra distribuído os enrolamentos do
induzido [3]. A Figura 2.2 (b) mostra o rotor da máquina síncrona onde está alojado o
enrolamento do indutor.
Figura 2.2 – Partes constituintes da máquina síncrona [4]
2.2.1 Estator da Máquina Síncrona
O estator da máquina síncrona é composto por chapas laminadas dotadas de
ranhuras axiais onde é acolhido o enrolamento do induzido (Figura 2.3) [3]. As chapas
oferecem características magnéticas de alta permeabilidade o que proporciona um
caminho de baixa relutância para o fluxo, diminuindo assim o fluxo disperso,
concentrando-o no entreferro (espaço físico entre o rotor e o estator). A construção do
estator a partir de chapas laminadas tem como finalidade diminuir as correntes parasitas
(correntes de Foucault), que estariam presentes em maior número caso a construção
fosse maciça.
Os enrolamentos do induzido são distribuídos espacialmente com um desfasamento
de 120º eléctricos entre fases. O número de enrolamentos por fase no estator depende do
6
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
número de pares de pólos do rotor, assim quando existem, por exemplo, dois pares de
pólos no rotor deverão existir dois enrolamentos por fase no estator da máquina
síncrona.
Núcleo do Estator
Carcaça
(Material Ferro-Magnético)
Enrolamento do
Estator (Induzido)
Figura 2.3 – Estator da máquina síncrona [5]
2.2.2 Rotor da Máquina Síncrona
O rotor pode também ser formado por chapas laminadas, geralmente do mesmo
material que o estator, nas quais é colocado o enrolamento do indutor. Dependendo da
sua aplicação o rotor da máquina síncrona pode ser de dois tipos diferentes, pólos
salientes (Figura 2.4(a)) ou pólos lisos (Figura 2.4(b)).
O rotor de pólos salientes é usado principalmente nas centrais hidroeléctricas, onde a
velocidade de rotação é baixa. Para se obter tensões a 50 Hz o número de pólos é
elevado (equação 2.1). Por sua vez, o rotor de pólos lisos é usado quando a máquina
opera com velocidades elevadas, ou seja, o número de pólos é pequeno. A sua utilização
está associada aos turbogeradores usados principalmente nas centrais térmicas [6].
Figura 2.4 - Rotor da máquina síncrona clássica:
(a) pólos salientes (b) pólos lisos [3]
Universidade do Minho
7
Máquina Síncrona e Sistemas de Excitação
2.3 Princípio de Funcionamento da Máquina Síncrona
Independentemente do seu modo de operação (MS, CS ou GS) o funcionamento da
máquina síncrona baseia-se na interacção entre campos magnéticos. O princípio de
funcionamento para cada um dos modos possíveis da máquina síncrona é explicado nos
itens seguintes com maior ênfase, como já referido, sobre o Alternador.
2.3.1 Funcionamento como Motor Síncrono
Um campo magnético rotativo está na base do funcionamento do motor síncrono.
Como se viu em 2.2.1, um conjunto de bobinas independentes, desfasadas de 120º
eléctricos, é colocado nas ranhuras do estator. Fazendo-se circular por estas, correntes
trifásicas desfasadas
de período no tempo, surge no estator um campo magnético
rotativo, onde a sua velocidade depende do valor da frequência aplicada às bobinas.
A Figura 2.5 esquematiza um motor síncrono com dois pólos. O campo
do rotor,
criado a partir da passagem de uma corrente contínua ( ) pelo enrolamento indutor,
tende a alinhar com o campo rotativo
, criado a partir do sistema trifásico de tensões
aplicado aos enrolamentos do induzido. Embora os dois campos não fiquem
perfeitamente alinhados a velocidade do campo
é igual à velocidade do campo
.
a
c
b'
'
c
b
a
'
Figura 2.5 – Interacção dos campos magnéticos no motor síncrono [2]
O esquema equivalente do motor síncrono, apenas para uma das fases do estator,
está representado na Figura 2.6. O enrolamento do rotor, alimentado com tensão
contínua ( ), cria o campo magnético principal. Assim, para cada fase do estator,
corresponde a equação 2.2 no qual não são consideradas as perdas magnéticas e as
perdas por atrito e ventilação.
(2.2)
8
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Na equação 2.2:
Amplitude da f.e.m.
Reactância do enrolamento do induzido
Resistência do induzido
Corrente de uma fase do induzido
Tensão aplicada ao enrolamento do induzido
Rf
Ls
RA
+
If
Vf
Ef
Lf
IA
V fase
Figura 2.6 – Circuito equivalente do motor síncrono [2]
A equação 2.2 pode ser vista vectorialmente na Figura 2.7. O campo magnético
criado no rotor corresponde a
enquanto o campo magnético do estator corresponde à
queda de tensão no enrolamento
que corresponde ao ângulo entre
. O ângulo de carga é representado por
e
, sendo
a velocidade angular do motor.
Assim, o campo magnético total resulta da soma vectorial do campo rotórico com o
campo estatórico, ou seja,
Figura 2.7 – Representação vectorial do funcionamento do motor síncrono [3]
2.3.2 Compensador Síncrono
Uma das vantagens da utilização da máquina síncrona prende-se com o facto de
poder funcionar com um factor de potência dependente apenas das condições de
excitação ( ). Desta forma, é possível regular a potência reactiva trocada com a rede
sendo nula a potência trocada entre veio e o exterior da máquina.
Universidade do Minho
9
Máquina Síncrona e Sistemas de Excitação
O funcionamento do compensador síncrono é o mesmo que o do motor ou gerador
síncrono funcionando em vazio, sendo que, a corrente contínua aplicada no enrolamento
indutor ( ) ajusta o valor de potência reactiva trocada com a rede. A Figura 2.8 mostra
o diagrama vectorial do funcionamento do compensador síncrono funcionando como
motor sem carga mecânica acoplada em que,
rede e
corresponde à corrente trocada com a
a tensão da rede, onde são desprezadas as perdas da máquina síncrona.
Figura 2.8 – Funcionamento do compensador síncrono
(a) motor funcionando como um sistema com carga capacitiva ideal (b) motor funcionando como um sistema
com carga indutiva ideal [3]
2.3.3 Gerador Síncrono ou Alternador
O GS ou alternador representa um subconjunto das máquinas rotativas capazes de
transformar energia mecânica, conseguida através de vários modos (Água, Vento,
Vapor, etc.), em energia eléctrica sob forças electromotrizes (f.e.m.) variáveis no tempo,
que por sua vez produzem sistemas de tensões e correntes [7].
A equação 2.3 mostra como se consegue obter o valor das f.e.m. no induzido do
alternador, em que, e representa a força electromotriz, v a velocidade de rotação, B a
densidade do fluxo magnético e l o comprimento do condutor.
(2.3)
A passagem de corrente contínua no enrolamento do indutor, como se viu em 2.3.1,
cria um campo magnético constante no rotor do alternador. Fazendo-se girar o rotor a
uma velocidade constante, são induzidas f.e.m nos enrolamentos do induzido. A tensão
induzida apresenta uma frequência directamente proporcional à velocidade e número de
pólos do rotor. A equação 2.4 mostra como se obtém a amplitude da f.e.m. induzida nas
fases do induzido [8].
(2.4)
Na equação 2.4:
10
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Amplitude da f.e.m.
Constantes resultantes da montagem dos enrolamentos da máquina
Número de espiras do enrolamento de uma fase
Frequência
Fluxo magnético
A amplitude da f.e.m. é proporcional ao fluxo magnético produzido pela corrente de
excitação e à velocidade de rotação. A Figura 2.9 representa a curva de magnetização do
alternador funcionando em vazio, ou seja, sem que lhe seja ligada qualquer carga
eléctrica [9].
Figura 2.9 – Curva de magnetização do alternador funcionando em vazio [9]
O circuito equivalente do alternador está representado na Figura 2.10. A excitação
da máquina síncrona faz-se a partir da corrente eléctrica indutora aplicada no rotor,
denominada corrente de campo. Pelo enrolamento do indutor (
faz-se passar uma
corrente contínua ( ), provida de uma fonte auxiliar. Esta corrente cria um campo
magnético principal que dá origem a um fluxo magnético, resultando daqui um campo
magnético variável no estator, quando o rotor gira. Desta forma, e para o funcionamento
como gerador obtém-se a equação 2.5.
(2.5)
Na equação 2.5:
Amplitude da f.e.m.
Reactância do enrolamento do induzido
Resistência do induzido
Universidade do Minho
11
Máquina Síncrona e Sistemas de Excitação
Corrente gerada
Tensão gerada
Rf
Ls
RA
+
If
Vf
Lf
IA
Ef
V fase
Figura 2.10 – Circuito equivalente do alternador [2]
Como
>>
(especialmente para máquinas de alta potência), para efeitos de
cálculo, pode desprezar-se a resistência do induzido, sendo que, na necessidade de se
saber qual o rendimento e perdas da máquina isto já não se poderá aplicar. Assim, a
equação 2.5 pode ser representada pela equação 2.6.
(2.6)
Da mesma forma que no MS, a equação 2.4 pode ser expressa vectorialmente. A
Figura 2.11 mostra o digrama vectorial do alternador desprezando a resistência do
induzido.
(a)
(b)
Figura 2.11 – Diagrama vectorial do alternador:
(a) sobreexcitado (b) sub-excitado
2.4 Potência da Máquina Síncrona
Um sistema eléctrico apresenta três tipos de potências, nomeadamente a potência
activa (W), a potência aparente (VA) e a potência reactiva (VAr). Estas potências
podem ser representadas vectorialmente a partir do triângulo de potências. A Figura
2.12 mostra o triângulo de potências num sistema eléctrico sinusoidal.
12
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Figura 2.12 – Triângulo de potências num sistema eléctrico sinusoidal
Num alternador, a potência máxima capaz de ser fornecida depende da sua
construção, onde, a potência mecânica estabelece o máximo esforço capaz de ser
fornecido pela máquina. Conhecendo-se as características de fabrico do alternador é
possível determinar o seu binário, velocidade e corrente nos enrolamentos do induzido
nominais. A potência mecânica no alternador é dada pela equação 2.7.
(2.7)
Onde:
Potência mecânica (CV)
Binário nominal (N.m)
Velocidade nominal (rpm)
Como se viu em 2.1 a velocidade do alternador depende do número de pólos da
máquina assim como da frequência de funcionamento. Sendo assim, a frequência de
geração será dada pela equação 2.8.
(2.8)
A potência activa do alternador obtém-se a partir da equação 2.9 em que
tensão composta aos terminais dos enrolamentos do induzido,
é a
a corrente na linha e
representa o ângulo entre a corrente na linha e a tensão simples.
(2.9)
A equação 2.10 representa a potência aparente nominal enquanto a equação 2.11
exprime a potência reactiva no alternador.
(2.10)
(2.11)
Universidade do Minho
13
Máquina Síncrona e Sistemas de Excitação
No alternador a potência activa gerada depende apenas das condições de excitação,
partindo do princípio que este gira à velocidade de sincronismo respeitando os valores
fixados pelo fabricante. O valor da corrente de excitação ( ) ajusta os valores da tensão
gerada alterando o valor das f.e.m. aplicadas ao enrolamento do induzido. Assim, o
valor da potência de saída do alternador é determinado a partir da equação 2.12, onde ,
como já referido, representa o ângulo entre
e
, sendo conhecido como ângulo de
carga.
(2.12)
2.5 Excitação do Alternador
A excitação do alternador faz-se a partir da injecção de corrente contínua no
enrolamento do indutor através de escovas e anéis colectores (Figura 2.13). A utilização
destes elementos possibilita que a corrente flua no enrolamento do indutor com o
alternador em movimento possibilitando desta forma a geração de energia.
Figura 2.13 - Elementos de excitação de um alternador de baixa potência:
(a) Anéis Colectores (b) Escovas
2.5.1 Sistemas de Excitação do Alternador
Antes da utilização dos sistemas de excitação empregues actualmente esta era feita a
partir de um gerador de corrente contínua, acoplado ao eixo do alternador. Este tipo de
excitação é conhecida como excitatriz de corrente contínua e apresenta inconvenientes,
tais como:
Elevada quantidade de escovas;
Arcos eléctricos nos comutadores durante as variações de carga;
Dificuldade em acoplar a máquina de corrente contínua ao eixo do alternador.
14
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Para além dos inconvenientes citados, existe ainda necessidade de manutenções
periódicas nas escovas, obrigando à interrupção da geração de energia eléctrica durante
o período de manutenção. A Figura 2.14 mostra a configuração clássica de um sistema
de excitação com excitatriz de corrente contínua, onde a corrente de excitação é ajustada
a partir do reóstato, a fim de se obter a tensão de saída desejada. A excitatriz CC é
alimentada a partir de uma fonte externa.
Comutador
Disjuntor
de Campo
Anéis
Deslizantes
Gerador
Exc. CC
Reóstato de
Campo
Tensão
de Saída
Transformador de
Potêncial
Regulador de Tensão
Controlo
Manual
Figura 2.14 – Excitatriz principal com controlo do reóstato de campo [10]
Actualmente, o uso de excitatrizes de corrente contínua é desinteressante. Posto isto,
a utilização de outro tipo de excitação torna-se mais rentável, robusta, eficaz e precisa.
Os diversos tipos de sistemas de excitação consideram três grupos fundamentais: o
sistema de excitação rotativo em corrente contínua, o sistema de excitação rotativo em
corrente alternada e o sistema de excitação estático [7]. Contudo, pelo facto do seu
baixo custo e bom desempenho, o sistema de excitação estático aparece praticamente
em todas as novas instalações [7] [11]. O sistema de excitação estático foi também o
utilizado na implementação deste trabalho
2.5.2 Sistema de Excitação Estático
O desenvolvimento da tecnologia dos semicondutores durante a década de sessenta
proporcionou o desenvolvimento dos sistemas de excitação. O uso de semicondutores
reduziu significativamente o tempo de resposta do sistema, assim como melhorou a
qualidade e intensidade do campo (“field forcing”) [10].
A Figura 2.15 apresenta o diagrama de blocos do sistema de excitação estático.
Aqui, a corrente necessária para alimentar o campo indutor deriva da própria tensão
gerada do alternador. A energia necessária à excitação é retirada dos enrolamentos do
induzido a partir de um transformador de excitação, sendo posteriormente rectificada e
aplicada ao enrolamento indutor através de duas escovas instaladas sobre os anéis
colectores do rotor [7]. O alternador, mesmo não sendo excitado, apresenta aos seus
terminais um certo valor de tensão, resultante da indução remanescente do alternador.
Universidade do Minho
15
Máquina Síncrona e Sistemas de Excitação
Como o sistema de excitação é alimentado a partir do próprio alternador, esta energia
remanescente proporciona o inicio de excitação do campo.
TC
Alternador
TP
TE
Regulador Automático de
Tensão
TC - Transformador de Corrente
TP - Transformador de Potencial
TE - Transformador de Excitação
Figura 2.15 – Sistema de excitação estático [11]
O sistema de excitação estático apresenta vantagens relativamente aos sistemas de
excitação rotativa. Em relação ao tempo de resposta na regulação esta diminui, pois, a
actuação do sistema é feita directamente no campo do alternador, reduzindo o
comprimento total da unidade isto porque, os elementos intermediários deste tipo de
excitação deixam de ser necessárias. Apesar de tudo, a excitação estática também
apresenta algumas desvantagens. O facto do fluxo de corrente ser controlado por
semicondutores introduz deformações nesta, distorcendo a tensão gerada no alternador.
Outra desvantagem da utilização deste sistema, prende-se com o facto de, tal como na
excitação contínua, serem necessárias escovas e anéis colectores para a alimentação do
campo do alternador [11].
2.5.3 Considerações na Escolha do Sistema de Excitação
A escolha adequada do sistema de excitação depende do tipo de instalação. Para
diferentes formas de geração de energia o alternador difere, quer na construção quer na
potência nominal.
O sistema de excitação rotativa em corrente contínua é cada vez menos utilizado
devido às constantes paragens para manutenção e ao desgaste mecânico, especialmente
nas escovas. Nas novas instalações este tipo de excitação é desaconselhável, quer se
trate de uma central térmica quer de uma central hidroeléctrica. A utilização deste
sistema faz-se notar em sistemas antigos. Na necessidade de aumentar a potência do
alternador pode tornar-se viável a continuidade da excitação rotativa CC, trocando-se
apenas alguns dos componentes essenciais, como por exemplo, trocar o regulador de
tensão por um microprocessador com uma excitatriz estática de pequena potência
(excitatriz piloto) para alimentar o campo da excitatriz rotativa de corrente contínua.
16
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Por outro lado, o sistema de excitação rotativa CA (brushless) é muito utilizado,
principalmente em alternadores que apresentam velocidades de rotação elevadas
(turbogeradores). Quando se trata de alternadores hidráulicos o uso desta topologia deve
ser repensada, isto porque, pode tornar-se dispendioso e demasiado pesado todo o
conjunto: sistema de excitação e rotor. Apesar de tudo, a excitação brushless apresenta
algumas características interessantes:
Ausência de escovas e anéis colectores;
Anulação de interferências criadas a partir de mau contacto;
Forma de onda de saída sinusoidal (ausência de deformações);
Manutenção reduzida: apenas cuidados de lubrificação;
Nos sistemas de excitação estático, a corrente do enrolamento do indutor é
controlada através de componentes semicondutores accionados por um Regulador
Automático de Tensão (AVR). Os mecanismos intermediários, tais como, excitatrizes
de corrente contínua ou de corrente alternada são suprimidos. O sistema de excitação
estático poderá ser utilizado em qualquer instalação, quer hidráulica quer térmica. As
vantagens deste tipo de sistema são:
Possibilidade de reduzir o tempo de resposta de recuperação da tensão do
conjunto alternador e sistema de excitação, dado que não existe um componente
de atraso na malha de excitação (excitatriz brushless);
Permite a medição da temperatura do rotor através da variação da resistência de
campo, pois o sistema de excitação contém informações em tempo real da
corrente e também da tensão do rotor. Assim sendo, é possível supervisionar a
resistência do enrolamento do campo que é directamente proporcional à
temperatura do rotor;
Implementação da protecção de falha à terra do rotor, que apenas é possível com o
acesso do enrolamento do rotor, como acontece neste tipo de excitação;
Aumento da capacidade de controlo de oscilações (tensão e potência);
Em caso de manutenção, esta pode ser efectuada com a máquina em
funcionamento;
Permite a modificação dos parâmetros que influenciam a resposta do sistema com
o gerador em serviço, no caso de conter um regulador micro processado;
Proporciona um incremento na facilidade de aquisição de dados para o sistema de
protecção e supervisão, como por exemplo, a detecção de falha à terra no sistema
indutor.
Universidade do Minho
17
Máquina Síncrona e Sistemas de Excitação
Depois de vistas as características de cada um dos sistemas de excitação conclui-se
que, a escolha de um sistema de excitação recai sobre apenas duas: o sistema de
excitação rotativa CA com rectificadores rotativos (brushless) e o sistema de excitação
estática. Contudo, pelo facto do seu baixo custo e bom desempenho, o sistema de
excitação estática aparece praticamente em todas as novas instalações [7] [11].
18
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Capítulo 3
Constituição e Controlo do Sistema de
Excitação Estático
O sistema de excitação estático apresentado no capítulo anterior é constituído por
equipamentos electrónicos, que em conjunto, fazem a regulação da tensão de saída do
alternador. Neste capítulo será demonstrada a constituição deste sistema de excitação
uma vez que este foi o tipo de excitação escolhida para este trabalho. Ainda neste
capítulo serão abordados alguns equipamentos de regulação existentes no mercado.
3.1 Divisão do Sistema de Excitação Estático
O sistema de excitação estático apresenta na sua constituição básica seis elementos
distintos:
1. Transformador de excitação
2. Pré-Excitação do alternador
3. Conversor de Potência
4. Desexcitação do alternador
5. Regulador de Tensão
6. Controlo, protecção e medição
3.1.1 Transformador de Excitação
O transformador de excitação (TE), conectado aos terminais da máquina síncrona,
tem como finalidade a alimentação do conversor de potência que fará a respectiva
excitação do alternador. No caso do funcionamento como motor ou compensador, o
sistema de excitação é alimentado por uma fonte independente.
A tensão de saída do transformador é determinada de acordo com o valor da tensão
de pico exigida pelo conversor de potência. No caso da corrente, esta define-se de
acordo com a corrente de excitação (campo) máxima do alternador.
O TE pode ser construído em líquido isolante ou seco dependendo das condições da
instalação. Podem ainda, ser utilizados três transformadores monofásicos, quando os
condutores de saída do gerador forem individualmente blindados. No que diz respeito à
ligação, esta deve ser feita em estrela-triângulo, sendo em triângulo no secundário
(Figura 3.1). Desta forma consegue-se confinar os harmónicos de terceira ordem ao
triângulo, não havendo propagação para o lado primário.
Universidade do Minho
19
Constituição e Controlo do Sistema de Excitação Estático
A utilização de um transformador trifásico, em detrimento de três monofásicos, é
preferível. O menor custo e a facilidade na montagem das interligações eléctricas são as
vantagens da sua utilização [11].
F1
F2
F3
Transformador
Alternador
Figura 3.1 – Transformador de excitação do sistema de excitação estático
3.1.2 Pré-Excitação do Alternador
Para o inicio do processo de geração de energia é necessário criar uma corrente de
excitação, independente da tensão nos terminais do alternador, por um período entre dez
a trinta segundos. A fonte auxiliar, para o arranque da produção, pode ser obtida tanto
pelos serviços auxiliares de corrente alternada como a partir de baterias. Dependendo da
qualidade das fontes, podem ser usadas ambas de uma forma redundante. A corrente de
pré-excitação deve garantir o disparo dos semicondutores do conversor de potência.
A partir do momento em que a tensão terminal da máquina seja suficiente, inicia-se
o processo de disparo do ou dos semicondutores (dependendo do conversor a usar)
colocando a tensão terminal nos valores nominais em vazio.
Quando o alternador a usar for de pequeno/médio porte é mais rentável obter a
corrente inicial de excitação a partir da tensão obtida a partir da indução remanescente.
Esta forma de pré-excitação pode apresentar algumas deficiências, nomeadamente a
perda da indução remanescente, devendo ser previstos meios para o seu
restabelecimento [11].
3.1.3 Conversor de Potência
A corrente de campo necessária à excitação do alternador é fornecida pelo conversor
de potência. Este ajusta o valor da corrente de campo a partir do controlo dos
semicondutores existentes. Os diferentes tipos de conversores de potência serão
estudados no capítulo seguinte. Apesar de se poderem usar diferentes conversores de
potência, a configuração com mais ampla faixa de operação e padrão para a maioria das
20
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
aplicações é a ponte rectificadora trifásica totalmente controlada, isto porque, em caso
de desexcitação a tensão da ponte pode ser invertida de maneira a reduzir rapidamente a
corrente de excitação e impedir o surgimento de sobretensões no campo. A utilização da
ponte transistorizada apenas é possível para corrente de campo até cerca de 50 A por
razões tecnológicas [11].
Equipamento do impulso de
disparo
Ponte de
Tiristores
Unidade de
Supervisão
Figura 3.2 – Diagrama de bloco de um conversor a tiristores [7]
3.1.4 Desexcitação do Alternador
O equipamento de desexcitação é composto basicamente pelo disjuntor de campo e
por uma resistência de descarga do campo (Figura 3.3). A utilização de um disjuntor
trifásico no lado CA pode apresentar algumas vantagens, relativamente ao disjuntor de
campo CC, tais como, menor manutenção devido ao menor desgaste dos pólos do
disjuntor CA, este disjuntor é encontrado mais facilmente no mercado e oferece mais
garantias quanto à segurança operacional porque o circuito de potência fica totalmente
separado após a abertura do disjuntor CA [11].
A desexcitação do enrolamento de campo é ainda mais importante para alternadores
de elevada potência. A energia armazenada no rotor tem que ser descarregada sempre
que se interrompe a corrente de excitação, caso contrário, aparecerão tensões elevadas
que podem danificar o equipamento de excitação e o enrolamento indutor.
DC
+
TD
TSC
EI
RD
DC - Disjuntor de Campo
TD - Tiristor de Descarga
TSC - Tiristor sobre tensão de campo
RD - Resistência de Descarga
EI - Enrolamento indutor (Campo)
Figura 3.3 – Diagrama de blocos do sistema de desexcitação [7]
Universidade do Minho
21
Constituição e Controlo do Sistema de Excitação Estático
3.1.5 Regulador Automático de Tensão
O regulador automático de tensão consiste em duas unidades distintas: a unidade de
medida e a unidade de regulação. A função da unidade de medida consiste em detectar
variações na tensão de saída do alternador e produzir um sinal que opere sobre a
unidade de regulação. A unidade de regulação recebe o sinal medido e actua sobre o
conversor de potência de maneira a colocar os valores da tensão do alternador dentro
dos limites previamente definidos [12]. A Figura 3.4 mostra o diagrama do
funcionamento do regulador automático de tensão, onde, a tensão gerada pelo alternador
é medida pelo transformador de potencial (TP), o seu valor é enviado para o regulador
de tensão. Aqui, as unidades de medida e controlo reagem de maneira a enviar para o
conversor de potência o sinal adequado à regulação da tensão de saída do alternador.
Posto isto, a corrente de campo é ajustada dentro dos limites impostos por todo o
sistema de geração de energia.
Transformador de
Excitação
Regulador de
Tensão
U
#
Equipamento de
disparo dos
Tiristores
Alternador
Figura 3.4 – Representação do regulador de tensão aplicado ao sistema de excitação estático
3.1.5.1 Tipos de Reguladores de Tensão
Os reguladores de tensão podem ainda ser divididos em dois tipos: analógicos e
digitais. Ambos apresentam características próprias que devem ser tomadas em conta na
escolha da melhor solução.
No caso dos reguladores analógicos pode-se esperar maior confiabilidade sempre
que não haja redundância total no canal de controlo. Em sistemas multi-processados,
onde o controlo automático e manual estão no mesmo CPU, se não houver redundância
de CPU, perde-se todo o sistema de excitação no caso de falha. Nos sistemas
analógicos, como o controlo automático é fisicamente independente do manual, isto não
acontece. Em sistemas de grande potência (em torno de 5 MVA), a escolha de
22
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
reguladores analógicos pode se tornar economicamente vantajosa, a sua escolha deverá
ser decidida tendo em atenção uma análise de custos de todo o equipamento [11].
Nos
mais
recentes
sistemas
de
excitação,
os
reguladores
digitais
ou
micro-processados, são a escolha mais óbvia. Estes reguladores apresentam diversas
vantagens relativamente aos anteriores, sendo elas:
Possibilidade de ajustes idênticos nas várias unidades que compõe uma central de
produção de energia;
Maior precisão nos ajustes;
Maior facilidade no projecto, pois a lógica do sistema de regulação é efectuado
em software amigável;
Menor quantidade de componentes activos, diminuindo desta forma a
possibilidade de falhas e necessidade de ajustes, tais como, potenciómetros,
botões de comando, medidores, reóstatos, etc;
Menor tempo de fabrico, devido à montagem do sistema de excitação ser
facilitada pela menor quantidade de fios e componentes;
Menor tempo de teste, comissionamento e start-up devido ao software de
detecção de defeitos e a não necessidade de trocas de componentes para ajuste dos
parâmetros.
3.1.5.2 Tipos de Unidade de Medida
Todas as unidades de medida, usadas nos reguladores automáticos de tensão, devem
apresentar uma referência para comparação com a tensão de saída do alternador. A
diferença entre as duas será recebida a partir do sinal de saída da unidade de medida,
sendo que, a sua precisão depende directamente da precisão da referência. Sendo assim,
este torna-se o critério mais importante na escolha da referência [12].
A unidade de medida pode ser dividida em dois tipos distintos: unidade de medida
descontínua e unidade de medida contínua.
Unidade de Medida Descontínua - Neste tipo de unidade de medida, existe uma
variação constante no sinal de saída sempre que a tensão se encontra fora dos
limites pré-estabelecidos. Por outro lado, se a tensão se mantiver dentro desses
limites, não é produzido qualquer sinal na unidade.
Unidade de Medida Contínua - A alteração da tensão de saída, para fora dos
valores pretendidos, provoca uma variação proporcional no sinal de saída da
unidade.
Universidade do Minho
23
Constituição e Controlo do Sistema de Excitação Estático
3.1.5.3 Tipos de Unidade de Regulação
Em qualquer sistema a unidade de regulação é usada para controlar ou sub-controlar
outras unidades. Assim como na unidade de medida, também a unidade de regulação
pode ser dividida em dois tipos distintos: Unidade de regulação descontínua e Unidade
de Regulação Contínua.
Unidade de Regulação Descontínua - Neste tipo, a taxa de variação da tensão de
saída é muitas vezes constante durante o funcionamento da unidade de medição.
Quando a unidade de medição termina a sua tarefa, a unidade de regulação
permanece na sua nova configuração independentemente de qualquer sinal.
Unidade de Regulação Contínua - A alteração do sinal proveniente da unidade
de medição deve originar proporcionalmente uma variação na tensão de saída da
unidade de regulação.
3.1.6 Controlo Protecção e Medida do Sistema de Excitação
De maneira a que seja possível o ajuste da tensão sem problemas quer para o
alternador quer para todo o sistema é necessário ter em atenção tanto o controlo, como a
medida e principalmente a protecção de todo o sistema.
3.1.6.1 Controlo do Sistema de Excitação
O controlo do sistema de excitação pode ser feito de dois modos distintos,
automático e manual.
No modo automático a tensão de saída do alternador é regulada sempre que saia dos
valores pré-definidos. Este controlo é efectuado a partir da realimentação da tensão
vinda do estator do alternador. Quando surgirem variações de carga o ajuste é efectuado
por uma malha de regulação PID. Onde P é a componente proporcional que corresponde
à amplitude do sinal de controlo, I é a componente integral que corresponde às
variações lentas da tensão e D corresponde a componente diferencial e responde às
variações rápidas da tensão. O comportamento do controlador PID será descrito ainda
neste capítulo [11].
Quanto ao modo manual este ajuste é feito por um operador. A finalidade deste
modo de operação prende-se com o facto de dar continuidade a toda a operação caso
exista algum defeito no controlo automático. O controlo manual é feito através de um
controlo em malha aberta para o valor desejável de referência da tensão aos terminais do
alternador, feita a partir da realimentação da corrente ou tensão do campo. Desta forma
apenas se consegue manter a corrente ou tensão de campo constantes. No caso de
24
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
alterações na carga é necessário o ajuste manual para correcção dos desvios
relativamente ao valor desejado. O controlo manual não é utilizado em alternadores que
estejam sujeitos a frequentes variações de carga, pois isso levaria a constantes ajustes da
corrente de excitação [11].
3.1.6.2 Protecção do Sistema de Excitação
O sistema de excitação deve incluir protecções contra curto circuitos, quer na
excitação quer aos terminais do alternador. Também os semicondutores devem ser
salvaguardados com protecção contra picos de tensão provenientes das comutações.
A protecção contra curto circuitos é efectuada a partir de fusíveis ultra-rápidos
capazes de fechar o circuito sempre que haja situação de defeito, protegendo desta
forma, todos os elementos do sistema. Contudo, a protecção contra curto-circuitos no
estator da máquina, para além do uso de fusíveis, deve ser efectuada por software
parando rapidamente a alimentação do campo do indutor e, em caso de alternadores de
grande potência, passando à desexcitação do mesmo.
3.1.6.3 Medida do Sistema de Excitação
Na regulação da tensão gerada no alternador é necessário, como visto anteriormente,
a obtenção do valor da tensão aos terminais da máquina. O valor desta tensão pode ser
obtido directamente a partir de um sensor de tensão de efeito Hall ou ainda a partir de
um transformador de potencial ligados em paralelo com os terminais do alternador. Para
além da tensão é importante a medição de outros valores de todo o sistema de geração
de energia. A corrente de excitação e a corrente gerada devem ser adquiridas,
conseguindo-se daqui, quer proteger todos os elementos contra curto-circuitos, como
calcular potências quer de excitação quer de produção. A medição das correntes pode
ser obtida também, a partir de sensores de corrente de efeito Hall assim como por
transformadores de corrente ligados em série com o circuito onde se pretende obter os
valores de corrente.
Todo o sistema de protecção deve ter em conta a curva de capabilidade do
alternador, esta delimita a região de operação do gerador síncrono definindo até que
ponto pode funcionar sem destruição dos seus enrolamentos, relacionando a potência
activa (P) com a potência reactiva do alternador (Q). A Figura 3.5 mostra a
representação simplificada de uma curva de capabilidade de um alternador, onde, AB
representa a limitação da corrente de campo, BC e DE a limitação da corrente no
estator, CD representa a limitação da fonte de energia mecânica e por último EF e FG a
limitação de sub-excitação. No desenho do sistema de excitação, a curva de
Universidade do Minho
25
Constituição e Controlo do Sistema de Excitação Estático
capabilidade é extremamente importante. A partir do conhecimento dos limites do
alternador, é possível proceder à excitação e obter a tensão de saída sem que haja
qualquer problema tanto no circuito de excitação como no circuito de geração.
Figura 3.5 – Curva de capabilidade do alternador [2]
3.2 Controlador Proporcional-Integral-Derivativo (PID)
O controlador PID é provavelmente o controlador mais utilizado actualmente em
processos industriais. A sua simplicidade e confiabilidade são características que fazem
deste controlador o mais empregado em sistemas onde, o controlo rigoroso de uma
grandeza se torna essencial [13].
A função de transferência que define o controlador PID é representada pela
equação 3.1.
(3.1)
Onde:
Ganho proporcional
Tempo integral
Tempo derivativo
Considerando
como a entrada do controlador PID e sendo a saída
, obtém-
se a equação 3.2 [14].
(3.2)
O controlador PID engloba três dos mais importantes controladores numa única
estrutura. A estrutura paralela do controlador PID é representada na Figura 3.6, onde
representa o erro entre a variável a controlar e a variável de referência e
éa
saída do controlador PID [13].
26
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
1
E(s)
1
sTi
U (s)
Kp
sTd
Figura 3.6 – Diagrama de blocos do controlador PID [13]
A resposta do controlador depende da acção de cada um dos seus componentes. Nos
tópicos seguintes serão apresentadas as contribuições para o sistema de cada elemento
do controlador PID. Antes da apresentação de cada uma das acções, é importante definir
algumas siglas que ajudam à interpretação deste controlador, sendo dado exemplos no
contexto deste trabalho.
PV – Variável de processo. Variável que é controlada no processo;
Exemplo: Tensão de saída do alternador.
SV ou SP – Variável de referência. Valor desejado para saída do processo;
Exemplo: Valor da tensão desejado aos terminais do alternador.
MV – Variável manipulada. Variável sobre a qual o controlador actua para
controlo do processo;
Exemplo: Valor da corrente de excitação do alternador.
Erro ou Desvio – Diferença entre o valor de referência e a variável de
processo;
Exemplo: Diferença entre a tensão desejada aos terminais do alternador e o valor
instantâneo medido.
3.2.1 Acção Proporcional
Neste tipo de controlador, a relação entre o sinal de saída e o sinal de entrada está
representada na Figura 3.7. O controlador proporcional não representa mais que um
amplificador com ganho ajustável, onde,
SP
E(s)
representa o ganho proporcional.
U(s)
Kp
Gp
Figura 3.7 – Representação do controlador proporcional (P)
Universidade do Minho
27
Constituição e Controlo do Sistema de Excitação Estático
Pela transformada inversa de Laplace do diagrama da Figura 3.7 obtém-se a
equação 3.3.
(3.3)
No controlador proporcional existe um erro residual permanente sempre que ocorre
uma modificação dos parâmetros do sistema a controlar. Este erro, dependente de
e
dos parâmetros do sistema, pode ser minimizado com o aumento do ganho, contudo,
este aumento conduz ao aumento do tempo de estabelecimento de PV e até mesmo à
instabilidade do sistema.
3.2.2 Acção Proporcional-Integral
Enquanto no controlador proporcional, a saída apenas era dada em função do erro,
no controlador proporcional-integral a saída é função do erro mas também do integral
do erro. Por integral do erro entende-se o somatório da diferença entre SV e PV (Erro)
desde o instante inicial do processo. O diagrama de blocos deste controlador encontra-se
na Figura 3.8.
SP
E(s)
Kp
Kp
Ti s
U(s)
Gp
Figura 3.8 – Representação do controlador proporcional-integral (PI)
Da mesma forma que no controlador proporcional, pela transformada inversa de
Laplace resulta a equação 3.4, em que
(tempo integral), representa o tempo
necessário para que a contribuição da acção integral iguale a da acção proporcional.
(3.4)
Ao adicionar um pólo na origem da função de transferência do controlador
proporcional-integral, elimina-se o erro estacionário, independentemente do sistema a
controlar. Por outro lado, o tempo de estabelecimento aumenta e a estabilidade relativa
piora. O ganho da acção proporcional deve ser reduzido sempre que esta seja combinada
com a acção integral.
O controlador PI é muito utilizado quando existem frequentes variações dos
parâmetros do sistema, contudo, estas alterações devem ser lentas para evitar oscilações
produzidas pela acção integral.
28
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
3.2.3 Acção Proporcional Derivativa
No controlador PD, o sinal de controlo (
) é proporcional ao erro e à taxa com
que o erro se altera. O facto do sinal de controlo ser proporcional à taxa de variação do
erro, implica que o modo derivativo nunca possa ser usado sozinho, uma vez que só
responde a regimes transitórios. A Figura 3.9 mostra a representação deste controlador.
SP
E(s)
K p 1 Td s
U(s)
Gp
Figura 3.9 – Representação do controlador proporcional-derivatico (PD)
Pela transformada inversa de Laplace tem-se a equação 3.5.
(3.5)
Com a inclusão do modo derivativo ao proporcional obtém-se um controlador muito
sensível, uma vez que, ao responder à taxa de variação do erro, efectua correcções
mesmo antes de este ser elevado. Apesar de este controlador não afectar directamente o
erro estacionário, adiciona amortecimento ao sistema (melhora a estabilidade)
permitindo assim o uso de valores de
mais elevados, o que por sua vez, implica um
menor erro estacionário.
3.2.4 Acção Proporcional-Integral-Derivativa (PID)
Este controlador, muito utilizado em vários processos, resulta da combinação das
várias acções descritas. Pode dizer-se que resulta num compromisso entre as vantagens
e desvantagens do controlador PI e do controlador PD.
Desta forma, pode concluir-se que, o modo integral é usado na eliminação do erro
estacionário causado por grandes variações dos parâmetros do sistema, enquanto, o
modo derivativo permite o aumento do ganho (
) e diminui as oscilações do sistema
aumentando desta forma a sua velocidade de resposta. A Figura 3.10 mostra o diagrama
de blocos do controlador PID.
SP
E(s)
1
K p 1
Td s
Ti s
U(s)
Gp
Figura 3.10 – Representação do controlador proporcional-integral-derivativo (PID)
Universidade do Minho
29
Constituição e Controlo do Sistema de Excitação Estático
Pela transformada inversa de Laplace tem-se a equação 3.6.
(3.6)
Para o controlador PID é esperada a resposta apresentada na Figura 3.11, onde a
variável manipulada é ajustada para o valor da variável de referência através das acções
dos diferentes elementos que compõem o controlador. Assim, a partir do controlador
PID consegue-se uma resposta precisa e suave na saída do processo onde este é
aplicado.
Figura 3.11 – Resposta esperada do controlador PID [13]
3.3 Reguladores Automáticos de Tensão no Mercado
Existem no mercado várias soluções que possibilitam a regulação da tensão aos
terminais de alternadores, quer de grande como pequena potência. Neste tópico será
feito um estado da arte onde serão apresentados alguns equipamentos existentes no
mercado.
3.3.1 Regulador R231 da Leroy Somer
A empresa Leroy Somer apresenta vários reguladores de tensão, entre eles, o
regulador R231 (Figura 3.12) para excitatrizes rotativas CC.
Figura 3.12 – Regulador R231 da Leroy Somer
30
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
As principais características deste regulador automático de tensão são:
Regulação de tensão da ordem dos
;
Gama de detecção/alimentação de 85 a 139 V (50/60 Hz);
Tempo de resposta rápida (500 ms) para uma amplitude de variação de tensão
transitória de
;
Regulação da tensão de saída;
Regulação da estabilidade de saída;
Protecção da alimentação por fusível de 8 A, acção lenta (tolerância de 10 A
durante 10 s);
Frequência: 50/60 Hz
Protecção contra baixa velocidade do alternador;
Permite regulação à distância.
3.3.2 Regulador Unitrol 1000 da ABB
A ABB também se dedica à produção de reguladores de tensão para máquinas
síncronas. O Unitrol 1000 representa uma proposta da empresa para alternadores de
pequeno porte para excitatrizes estáticas. Trata-se de um equipamento pequeno mas
muito eficaz na regulação da tensão. A Figura 3.13 mostra o aspecto deste regulador.
Figura 3.13 – Regulador Unitrol 1000 da ABB [15]
O regulador Unitrol 1000 apresenta as seguintes características:
Regulador de tensão com algoritmo PID;
Regulador de factor de potência com algoritmo PID;
Regulador de potência reactiva com algoritmo PID;
Regulador de corrente de excitação (controlo manual) com algoritmo PI;
Valores digitais de referência internos;
Transferência entre todos os modos de operação;
Universidade do Minho
31
Constituição e Controlo do Sistema de Excitação Estático
Função soft-start;
Compensador de corrente reactiva, para operação de linha;
Distribuição de potência reactiva entre as máquinas em paralelo através do RS
485;
Comunicação série Modbus;
Limitador Volts/Hertz;
Limitador de corrente de excitação mínima;
Limitador de corrente máxima de excitação em três níveis temporizados
(dependente da temperatura);
Limitador de corrente reactiva em função da potência activa (P/Q);
Limitador da tensão do estator;
Limitador de corrente do estator (dependente da temperatura);
Distribuição de potência reactiva Mestre/Escravo;
Detecção de subtensão para disparar uma corrente externa e suportar
curto-circuitos;
Controle da tensão de saída em circuito aberto, para fins de teste;
Função teste em degrau integrada;
Modo Stand-by para o sistema de canal redundante;
Sinais de Alarmes e Trip;
3.3.3 Regulador Digureg da Simens
A Siemens desenvolveu um regulador de tensão para geradores de pequeno porte
com excitatrizes rotativas CA (brushless). O regulador Digureg compreende na sua
constituição um regulador de tensão integrado e uma secção de potência formando uma
unidade compacta.
O regulador digureg apresentado na Figura 3.14 apresenta os seguintes limitadores
necessários para a regulação da tensão [16]:
Sobreexcitação;
Subexcitação;
Corrente de Field Forcing Limiter;
Corrente estática;
Tensão/Frequência (V/Hz).
Para além dos limitadores descritos, o regulador Dirureg apresenta as seguintes
características [16]:
Monitorização dos diodos rotativos de excitatrizes sem escovas;
32
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Estabilizador do sistema de potência (PSS);
Sincronizador automático (substitui um relé de sincronismo).
O regulador possui as seguintes formas de interface:
Contactos livres de potencial;
Comunicação serial PROFIBUS DP ou ModBUS;
Figura 3.14 – Regulador Digureg da Siemens [16]
Universidade do Minho
33
Regulador da Corrente de Excitação de um Alternador
Capítulo 4
Conversores Electrónicos de Potência
Os conversores electrónicos de potência são parte integrante dos sistemas de
excitação, estes modelam a corrente criadora do campo do indutor. Dependendo do tipo
de excitatriz, a alimentação dos conversores pode ser feita a partir de corrente alternada
ou corrente contínua. Como a corrente criadora do campo do alternador é contínua
torna-se necessário rectificar e/ou ajustar essa corrente.
Assim, neste capítulo apresentar-se-ão os diferentes conversores electrónicos de
potência capazes de converter corrente alternada em corrente contínua (CA/CC) e
conversores que possibilitam o ajuste da corrente contínua (CC/CC).
4.1 Conversores CA/CC
Os conversores CA/CC convertem a corrente proveniente de sistemas alternados em
corrente contínua a partir de pontes rectificadoras que podem ser não controladas ou
controladas (rectificadores). Os rectificadores podem ser monofásicos ou trifásicos
dependendo da aplicação.
4.1.1 Rectificador Monofásico Não Controlado em Ponte
Completa
O rectificador monofásico não controlado utiliza diodos como elementos de
rectificação. A Figura 4.1 apresenta o esquema eléctrico do rectificador não controlado.
AC
AC
(a)
AC
(b)
(c)
Figura 4.1 – Rectificador monofásico:
(a) sem filtro (b) filtro capacitivo (c) filtro indutivo
Dependendo do tipo de filtro do lado CC do rectificador, este apresenta diferentes
tipos de forma de onda, tanto à entrada como à saída. Compreende-se como filtro,
capacitivo e indutivo. A Figura 4.2 mostra as formas de onda do rectificador
monofásico não controlado sem filtro do lado CC.
Universidade do Minho
35
Conversores Electrónicos de Potência
Tensão de Entrada
Corrente de Entrada
Tensão de Saída
Corrente de Saída
V
A
V
A
Figura 4.2 – Formas de onda da tensão na entrada e saída do rectificador monofásico não controlado sem
filtro
Caso o filtro do lado CC do rectificador seja capacitivo, este apresenta na entrada e
na saída as formas de onda da tensão e corrente da Figura 4.3
Tensão de Entrada
Corrente de Entrada
Tensão de Saída
Corrente de Saída
V
A
V
A
Figura 4.3 - Formas de onda da tensão de entrada e saída do rectificador monofásico não controlado com filtro
capacitivo
No caso do filtro do lado CC ser indutivo, o rectificador apresenta as formas de onda da
Figura 4.4.
Tensão de Entrada
Corrente de Entrada
V
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.4 - Formas de onda da tensão de entrada e saída do rectificador monofásico não controlado com filtro
indutivo
36
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
4.1.2 Rectificador Monofásico Semi-Controlado
O rectificador monofásico semi-controlado comporta diodos e tiristores como
elementos de rectificação. Da mesma forma que os rectificadores não controlados, a
saída dos rectificadores depende do tipo de filtro a utilizar. A principal vantagem do uso
de rectificadores semi-controlados é o facto de ser possível o ajuste do valor médio da
tensão de saída a partir do controlo do ângulo de disparo dos tiristores, apenas da parte
positiva da tensão de entrada. A parte negativa da tensão de entrada continuará a ser
rectificada a partir dos diodos que compõe o rectificador. A Figura 4.5 mostra o
esquema eléctrico do rectificador semi-controlado para os diferentes tipos de carga.
AC
AC
(a)
AC
(b)
(c)
Figura 4.5 – Ponte rectificadora monofásica semi-controlada:
(a) sem filtro (b) filtro capacitivo (c) filtro indutivo
Da mesma forma que no rectificador não controlado, o rectificador semi-controlado
apresenta diferentes formas de onda de acordo com o filtro do lado CC. A
Figura 4.6 apresenta as formas de onda da tensão e corrente na entrada e saída do
rectificador quando este não apresenta qualquer filtro na sua saída.
Tensão de Entrada
Corrente de Entrada
V
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.6 – Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico
semi-controlado sem filtro para um ângulo de 90º
Para um rectificador semi-controlado com filtro capacitivo obtém-se as formas de
onda das tensões e correntes da Figura 4.7.
Universidade do Minho
37
Conversores Electrónicos de Potência
Tensão de Entrada
Corrente de Entrada
V
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.7 - Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico
semi-controlado com filtro capacitivo para um ângulo de disparo dos tiristores de 90º
Para um rectificador monofásico semi-controlado com filtro indutivo resulta as
formas de onda da Figura 4.8.
Tensão de Entrada
Corrente de Entrada
Tensão de Saída
Corrente de Saída
V
A
V
A
Figura 4.8 - Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico
semi-controlado com filtro indutivo para um ângulo de disparo dos tiristores de 90º
4.1.3 Rectificador Monofásico Totalmente Controlado
O rectificador monofásico totalmente controlado, ao contrário do semi-controlado,
utiliza apenas tiristores como elementos de rectificação. A utilização de apenas estes
elementos possibilita o ajuste do valor médio da tensão de saída do rectificador,
podendo ser controlado quer a parte positiva quer a parte negativa da tensão de entrada.
Desta forma, consegue-se obter uma variação do valor médio da parte CC do
rectificador, desde zero até ao valor máximo da tensão de entrada. A Figura 4.9
apresenta a topologia do rectificador monofásico totalmente controlado para os
diferentes tipos de filtros.
38
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
AC
AC
(a)
AC
(b)
(c)
Figura 4.9 – Ponte rectificadora monofásica totalmente controlada:
(a) sem filtro (b) filtro capacitivo (c) filtro indutivo
Para o funcionamento do rectificador sem filtro do lado CC, resultam as formas de
onda da Figura 4.10.
Tensão de Entrada
Corrente de Entrada
Tensão de Saída
Corrente de Saída
V
A
V
A
Figura 4.10 – Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico totalmente
controlado sem carga do lado CC para um ângulo de 120º
Da mesma forma que os rectificadores apresentados anteriormente, também aqui, o
tipo de filtro do lado CC pode variar. O resultado da rectificação totalmente controlada
para uma saída com filtro capacitivo está representado na Figura 4.11.
Tensão de Entrada
Corrente de Entrada
V
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.11 - Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico totalmente
controlado com filtro capacitivo para um ângulo de 120º
Universidade do Minho
39
Conversores Electrónicos de Potência
Quando o rectificador passa a ter filtro indutivo, este apresenta as formas de onda da
tensão e corrente de entrada e saída da Figura 4.12.
Tensão de Entrada
Corrente de Entrada
V
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.12 - Formas de onda da tensão e corrente de entrada e saída do rectificador monofásico totalmente
controlado com filtro indutivo para um ângulo de 120º
Como se pôde verificar, em qualquer dos rectificadores, as formas de onda variam
consoante o filtro que é aplicada ao rectificador. No caso de uma saída apenas com
carga resistiva, as formas de onda na saída mantêm-se iguais às da tensão de entrada,
quer para o rectificador não controlado quer a partir do momento de abertura dos
tiristores no rectificador controlado. Quando o filtro é capacitivo ou indutivo, as formas
de onda da tensão ou corrente diminuem o ripple. No caso de um filtro capacitivo é o
ripple da tensão que diminui, diminuindo o ripple da corrente quando o filtro for
indutivo.
4.1.4 Rectificador Trifásico Não Controlado em Ponte
Completa
O rectificador trifásico não controlado apresenta um funcionamento semelhante ao
rectificador monofásico. A Figura 4.13 mostra a topologia do rectificador trifásico não
controlado com ligação a diferentes tipos de filtros do lado CC.
(a)
(b)
(c)
Figura 4.13 - Ponte rectificadora trifásica não controlada:
(a) sem filtro (b) filtro capacitivo (c) filtro indutivo
40
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Ao acrescentar-se um braço no rectificador torna-se possível a rectificação da tensão
vinda de alimentações trifásicas, apresentando um menor ripple na corrente ou tensão,
quando utilizados filtros indutivos ou capacitivos, que os rectificadores monofásicos. As
formas de onda da entrada e saída da corrente e tensão do rectificador trifásico não
controlado estão representadas na Figura 4.14.
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.14 – Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico não controlado
sem filtro do lado CC
As formas de onda das tensões e correntes para um filtro capacitivo apresentam a
forma representada na Figura 4.15.
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.15 - Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico não controlado
com filtro capacitivo
No caso de o filtro do lado CC do rectificador ser indutivo, ao contrário de um
alisamento da tensão, tem-se uma diminuição do ripple da corrente na saída do
rectificador. Para um rectificador trifásico não controlado com filtro indutivo, as formas
de onda são apresentadas na Figura 4.16.
Universidade do Minho
41
Conversores Electrónicos de Potência
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.16 – Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico não controlado
com filtro indutivo
4.1.5 Rectificador Trifásico Semi-Controlado
Da mesma forma que o rectificador monofásico semi-controlado, o rectificador
trifásico semi-controlado apresenta tiristores e diodos como elementos de rectificação.
O valor médio da tensão pode variar, dentro da parte positiva da tensão de entrada, de
acordo com o ângulo de disparo dos tiristores. A rectificação da parte negativa da tensão
de entrada, tal como no monofásico, fica a cargo dos diodos. A Figura 4.17 apresenta a
topologia do rectificador trifásico semi-controlado para diferentes tipos de filtro.
(a)
(b)
(c)
Figura 4.17 - Ponte rectificadora trifásica semi-controlada:
(a) sem filtro (b) filtro capacitivo (c) filtro indutivo
Na inexistência de qualquer filtro do lado CC, o rectificador apresenta as formas de
onda da Figura 4.18.
42
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.18 - Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico semi-controlado
sem filtro para um ângulo de disparo de 120º
No caso dos rectificadores trifásico semi-controlado é importante salientar que entre
0º e 30º, tendo como referência o ciclo da tensão de linha ao qual está conectado, o
tiristor não pode entrar em condução, pois, durante esse intervalo de tempo o mesmo
está inversamente polarizado. No entanto, é possível efectuar um controlo no
accionamento entre 30º e 210º, resultando daqui uma faixa de controlo de 180º.
As formas de onda da entrada e saída do rectificador trifásico semi-controlado para
um filtro capacitivo estão representadas na Figura 4.19.
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.19 - Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico semi-controlado
com filtro capacitivo para um ângulo de disparo de 90º
Para além do filtro referido, tal como nos outros rectificadores, há ainda a
possibilidade de o rectificador trifásico semi-controlado apresentar filtro indutivo. Na
Figura 4.20 são apresentadas as formas de onda das tensões e correntes na entrada e na
saída do rectificador apresentado.
Universidade do Minho
43
Conversores Electrónicos de Potência
Vab
Vbc
Vca
Ia
Ib
Ic
V
V
V
A
A
A
Tensão de Saída
Corrente de Saída
V
A
Figura 4.20 - Formas de onda da tensão e corrente de entrada e saída do rectificador trifásico semi-controlado
com filtro indutivo para um ângulo de disparo de 120º
4.1.6 Rectificador Trifásico Totalmente Controlado
Como visto no Capítulo 3, o rectificador trifásico totalmente controlado é o
conversor de potência padrão em quase todos os sistemas de excitação. Até aqui
descreveu-se o comportamento das diferentes topologias de rectificadores quando
utilizados diferentes filtros. No estudo do rectificador trifásico totalmente controlado
mostrar-se-á o comportamento do rectificador com filtro indutivo, uma vez que, o
enrolamento do indutor, onde será aplicada corrente contínua, apresenta comportamento
indutivo. Serão apresentadas formas de onda para diferentes ângulos de disparo dos
tiristores que compõe exclusivamente o rectificador trifásico totalmente controlado. O
valor da corrente criadora do campo do alternador vai depender do ângulo definido para
o disparo dos tiristores, ou seja, ao alterar-se o valor médio da tensão de saída do
rectificador consegue-se aumentar ou diminuir o valor da corrente de excitação,
necessária para criar o campo, e assim manter o valor da tensão gerada dentro dos
valores pretendidos. A Figura 4.21 mostra o rectificador em questão alimentando uma
carga indutiva.
Sistema
Trifásico
Figura 4.21 - Rectificador trifásico totalmente controlado com filtro indutivo
44
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
O valor médio da corrente de saída para diferentes ângulos de disparo será mostrado
nas seguintes figuras. Assim, a Figura 4.22 apresenta os valores da tensão e corrente de
saída para um ângulo de 30º.
Vab
Vbc Vca
Tensão de Saída
V
V
V
V
A
Corrente de Saída
Figura 4.22 - Formas de onda da tensão e corrente de saída do rectificador totalmente controlado com filtro
indutivo com um ângulo de disparo de 30º
Para um ângulo de disparo de 60º tem-se as formas de onda da Figura 4.23.
Vab
Vbc
Vca
Tensão de Saída
V
V
V
V
A
Corrente de Saída
Figura 4.23 - Formas de onda da tensão e corrente de saída do rectificador totalmente controlado com filtro
indutivo para um ângulo de disparo de 60º
Ao alterar-se o valor do ângulo de disparo dos tiristores verifica-se que o valor
médio da corrente de saída do rectificador altera-se. O valor da corrente de saída pode
alterar entre 0 e o valor máximo fornecido pela fonte, esta característica faz do
rectificador trifásico totalmente controlado o mais usado em sistemas de excitação.
4.2 Valor Médio da Tensão de Saída dos Rectificadores
O valor médio da tensão na saída do rectificador monofásico não controlado é
calculado a partir da equação 4.1 onde
Universidade do Minho
é o valor máximo da tensão de entrada,
45
Conversores Electrónicos de Potência
o valor médio da tensão de saída,
rectificador e
.e
o número de pulsos da tensão de saída do
os limites de integração da tensão de entrada.
(4.1)
4.3 Topologia dos Conversores de Corrente Contínua
Diversas aplicações exigem o ajuste da tensão contínua para o seu normal e correcto
funcionamento. Existem circuitos electrónicos capazes de aumentar ou diminuir a
tensão contínua aplicada às cargas, a esses circuitos dá-se o nome de conversores CCCC, podendo ser de dois tipos diferentes:
Conversores CC-CC sem Isolamento
Conversores CC-CC com Isolamento
A principal diferença entre os dois tipos de conversores está no isolamento entre a
entrada e saída. Nos conversores sem isolamento não existe qualquer isolamento o que,
em caso de avaria dos componentes que os constituem poderá a afectar e danificar as
cargas onde estes são empregues. No caso de conversores CC-CC isolados existe
isolamento entre a entrada e a saída, feito através de um transformador de frequência
[17].
4.4 Conversores CC-CC sem isolamento
Sempre que não seja necessário o isolamento entre a entrada e a saída do conversor,
pode-se utilizar este tipo de topologia pois apresenta uma construção relativamente
simples e um bom desempenho. As principais montagens dos conversores sem
isolamento são:
Conversor Step-Down (diminui a tensão de entrada)
Conversor Step-Up (aumenta a tensão de entrada)
Conversor Step-Up/Step Down (aumenta ou diminui a tensão de entrada)
4.4.1 Conversor Step-Down
A utilização deste conversor está associado a aplicações onde seja necessário o
ajuste da tensão de uma fonte de corrente contínua, para valores menores que os
fornecidos. O circuito da Figura 4.24 ilustra o esquema eléctrico deste tipo de
conversor.
46
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Q1
L1
+
Vd
C1
D1
C2
R1
V0
-
Figura 4.24 – Conversor Step-Down
A tensão de saída é controlada a partir do interruptor Q1 colocado em série com a
fonte. A relação entre a tensão de entrada (
) e a tensão de saída ( ) é dada em função
da razão cíclica (D) de acordo com a equação 4.2 [18].
(4.2)
A saída do conversor é pulsada, daí estes conversores serem conhecidos como fontes
comutadas. Por este facto, este tipo de conversores pode tornar-se impróprio para
dispositivos sensíveis, este problema é ultrapassado usando um filtro LC de modo a
filtrar a corrente vinda do conversor, conseguindo-se desta forma uma saída constante
[17] [18].
4.4.2 Conversor Step-Up
A alteração da disposição dos elementos, que compõe o conversor não isolado, faz
com que outras topologias sejam possíveis de realizar. O conversor Step-Up possibilita
o ajuste da tensão de saída para valores superiores à tensão de entrada. O esquema
eléctrico simplificado deste conversor é apresentado na Figura 4.25.
D1
+
L1
Q1
Vd
C1
C2
R1
V0
-
Figura 4.25 – Conversor Step-Up
Com esta disposição dos elementos é possível, a partir da razão cíclica ( ), ajustar a
tensão de saída. A relação entre a tensão de entrada e saída do conversor é dado pela
equação 4.3 [18].
(4.3)
Universidade do Minho
47
Conversores Electrónicos de Potência
4.4.3 Conversor Step-Up/Step-Down
Quando se pretende obter uma tensão estável, necessário para cargas sensíveis a
alterações da fonte de alimentação, este conversor apresenta-se como a melhor escolha.
Sempre que a fonte de tensão contínua não se apresenta constante o conversor
step-up/step-down mantém a tensão de saída no valor pretendido para uma tensão de
entrada variável. A Figura 4.26 mostra a configuração deste conversor.
Q1
D1
+
C1
Vd
L1
C2
R1
V0
-
Figura 4.26 – Conversor Step-Up/Step-Down
A tensão de saída depende do valor da razão cíclica ( ) onde, para valores inferiores
a 0,5
, em que
é período da onda quadrada aplicada ao semicondutor, coloca na
saída valores inferiores à tensão de entrada. Para valores de razão cíclica superiores a
0,5
, a saída é superior à entrada. A relação da tensão de saída com a tensão de entrada
é expressa a partir da equação 4.4 [17].
(4.4)
O conversor Step-Up/Step-Down é construído usando um Step-Up e um Step-Down
em cascata [17].
4.5 Conversores CC-CC com Isolamento
Os conversores CC-CC com isolamento são muito utilizados em situações onde o
isolamento galvânico entre a entrada e saída seja importante. O isolamento é conseguido
a partir de um transformador em modo de comutação com uma frequência superior à de
alimentação. Ao utilizar um transformador de alta frequência, este pode apresentar
dimensões reduzidas, tanto mais reduzidas quanto maior for a frequência de comutação.
Existem diversos conversores isolados sendo que os dois principais são o conversor
Flyback e o conversor Forward. Existem ainda outros conversores, sendo que qualquer
um deles deriva destes dois sendo eles:
48
Double-Ended;
Full Bridge;
Push-Pull;
Half Bridge
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
4.5.1 Conversor Flyback
O conversor flyback deriva do conversor step-up/step-down visto em 4.4.3, onde o
elemento indutor é substituído por um transformador de alta frequência proporcionando
desta forma o isolamento entre a entrada e a saída do conversor CC-CC. A Figura 4.27
mostra o conversor flyback onde os dois enrolamentos que constituem o transformador
estão representados pelo circuito equivalente [18].
D1
N1 : N 2
+
Lm
+
v1
+
v2
-
-
Vd
+
V0
-
(a)
Q1
N1 : N 2
+
Lm
Vd
Q1
D1
+
v1
-
+
v2
V0
-
+
-
(b)
Figura 4.27 – Conversor flyback nos estados:
(a) semicondutor Q1 conduz (b) semicondutor Q1 não conduz [18]
Quando o interruptor Q1 conduz, pela polaridade dos enrolamentos do
transformador, o diodo D1 encontra-se inversamente polarizado. A corrente contínua
faz aumentar o fluxo magnético na indutância do primário, magnetizando o núcleo do
transformador que aumenta linearmente desde o valor inicial
. A equação 4.5
define o fluxo armazenado no núcleo desde o instante inicial 0 até o interruptor Q1 abrir
(
),
define o número de espiras do primário do transformador [18].
(4.5)
O pico de fluxo no final de
é dado pela equação 4.6.
(4.6)
Quando
acaba o interruptor Q1 deixa de conduzir interrompendo a corrente
contínua de magnetização. A energia armazenada no núcleo do transformador flui agora
no enrolamento secundário através do diodo D1. A tensão no enrolamento secundário é
Universidade do Minho
49
Conversores Electrónicos de Potência
inversa à tensão de saída (
) fazendo com que o fluxo diminuía também de
forma linear durante o tempo que o interruptor Q1 não conduz. A equação 4.7 define
como o fluxo diminui no secundário, onde
representa o período de comutação do
interruptor [18].
(4.7)
A Figura 4.28 mostra as formas de onda do comportamento do conversor flyback.
Figura 4.28 – Formas de onda do conversor Flyback [18]
Da mesma forma que nos conversores CC-CC não isolados, a tensão de saída é
ajustada de acordo com a razão cíclica ( ) aplicada ao interruptor. No conversor
flyback, para além da razão cíclica também a relação de transformação do transformador
( ) vai definir o valor da tensão de saída do conversor. Assim, a equação 4.8 mostra a
relação entre a tensão de saída e a tensão de entrada.
(4.8)
4.5.2 Conversor Forward
O conversor forward deriva do conversor step-down apresentado em 4.4.1. Também
este conversor proporciona isolamento galvânico entre a entrada e saída do conversor
através de um transformador de frequência. A Figura 4.29 apresenta uma idealização
deste tipo de conversor.
50
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
N1 : N 2
L
D1
vL
+
+
-
+
V0
D2
-
Vd
Q1
Figura 4.29 – Conversor Forward ideal [18]
Quando o interruptor Q1 conduz, D1 fica directamente polarizado e D2
inversamente polarizado. A tensão na indutância
será, em função da relação de
transformação ( ), dada pela equação 4.9. A tensão
é positiva ou seja a corrente na
bobina ( ) aumenta.
(4.9)
Quando o interruptor passa para o estado de não condução, a corrente na bobina ( )
circula através do diodo
e a tensão aos terminais da indutância altera o sinal. A
equação 4.10 mostra isso mesmo.
(4.10)
Com a troca de sinal da tensão
, a corrente
diminui linearmente. A equação 4.11
mostra o rácio da tensão de saída num conversor forward que é proporcional à razão
cíclica , similarmente ao conversor Step-Down [18].
(4.11)
Na implementação prática do conversor forward, a corrente de magnetização deve
ser tomada em consideração de maneira a proporcionar o correcto funcionamento do
conversor. Caso contrário, a energia armazenada no núcleo do transformador pode levar
à falha do conversor forward. Para uma aproximação prática deste conversor supõe-se
que a energia magnética armazenada no transformador é recuperada e volta para a
entrada do conversor. A Figura 4.30 mostra uma aproximação ao comportamento real
do transformador no conversor forward [18].
Universidade do Minho
51
Conversores Electrónicos de Potência
iL
D1
+
+
vL
+
-
V0
D2
N3
N1
Vd
N2
-
D3
Figura 4.30 – Conversor forward (representação prática) [18]
Para o estudo do conversor forward, nos diferentes estados do seu funcionamento,
torna-se necessário perceber o seu comportamento nesses mesmos estados. Para tal usase o circuito da Figura 4.31 onde o transformador é representado pelo seu circuito
equivalente, onde, as indutâncias parasitas são desprezadas para o estudo.
i3
iL
i1
+
Vd
Lm
im
isw
D1
+
v1
-
i2
+
-
V0
D2
-
N3
+
-
-
voi
vL
-
N2
N1
+
+
Ideal
v sw
D3
Figura 4.31 – Conversor forward representado com o circuito equivalente do transformador [18]
Quando o interruptor se encontra no estado de condução tem-se a equação 4.12.
(4.12)
A corrente
aumenta linearmente desde zero até que o interruptor passe para o
estado de não condução, nesse instante
apresenta o seu valor máximo. A partir daqui
, onde todas as correntes do circuito apresentam as direcções representadas na
Figura 4.31 e onde
inversamente polarizado,
. Pelo facto de nesse instante
e por esse motivo obtém-se a corrente
4.13) que é a corrente que flui pelo diodo
se encontrar
(equação
para a fonte que alimenta o conversor.
(4.13)
Durante o intervalo
da Figura 4.32, quando a corrente
flui, a tensão no
primário do transformador bem como da indutância de magnetização
é dada pela
equação 4.15.
52
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
(4.15)
Uma vez concluída a desmagnetização do núcleo do transformador, a corrente de
magnetização fica com o valor de zero assim como a tensão no enrolamento do primário
do transformador. O intervalo de tempo
onde
pode ser obtido a partir da equação 4.16,
é o período da onda quadrada aplicada ao semicondutor utilizado no conversor
forward e D a razão cíclica dessa mesma onda quadrada.
(4.16)
Para ser garantida a total desmagnetização do transformador do conversor, a
definição do valor máximo da razão cíclica torna-se indispensável. A equação 4.17
mostra como se calcula o valor máximo admitido pelo conversor.
(4.17)
A Figura 4.32 apresenta as formas de onda para o funcionamento do conversor
forward.
v1
Vd
0
N1
Vd
N3
t
tm
t on
toff
Ts
isw
i1
im
t
i1 im
iL
t
Figura 4.32 – Formas de onda do conversor forward [18]
Universidade do Minho
53
Regulador da Corrente de Excitação de um Alternador
Capítulo 5
Implementação do Regulador da Corrente de
Excitação do Alternador
Neste capítulo serão descritos os passos que conduziram à implementação do
regulador da corrente de excitação de um alternador, nomeadamente o circuito de
potência e o circuito de comando e regulação. O alternador para o qual se pretende o
controlo da tensão de saída é o HCM434D da Stamford accionado por um motor de
combustão rodando à velocidade nominal de sincronismo do alternador. Este alternador
apresenta na ficha técnica 200 kVA 380/190 V e está representado na Figura 5.1 Apesar
da tensão nominal do alternador ser de 380 V pretende-se que o sistema implementado
seja capaz de proporcionar uma variação da tensão de saída do alternador entre 360 e
400 V.
Motor de
Combustão
Alternador
Figura 5.1 - Alternador HCM434D da Stamford acoplado ao motor de combustão
O circuito de potência consiste basicamente no transformador de excitação, no
rectificador monofásico e no conversor flyback que alimentará o enrolamento do
indutor. O circuito de comando engloba a unidade medida e a unidade de controlo. Na
Universidade do Minho
55
Implementação do Regulador da Corrente de Excitação do Alternador
unidade de medida constam sensores de tensão e corrente de efeito Hall para a medição
dos valores da tensão de saída do alternador e da corrente de excitação, enquanto a
unidade de controlo apresenta o drive do semicondutor (MOSFET). Todos os sinais
recebidos da unidade de medida, assim como os sinais enviados para a unidade de
controlo provêm do microcontrolador que é o centro de todo o sistema. Tanto o circuito
de potência como o circuito de comando foram previamente montados e testados em
breadboard com todo o sistema em funcionamento, excepto a ligação ao enrolamento
indutor. Posteriormente, foram projectados os esquemáticos dos circuitos da unidade de
controlo e da unidade de medida com as respectivas alimentações e desenvolvidas as
placas de circuito impresso. A placa do circuito de potência foi desenvolvida numa
placa perfurada standard.
5.1 Descrição do Sistema Desenvolvido
Para a construção do regulador foram seguidos vários passos até à implementação
do mesmo. O diagrama simplificado do regulador proposto é apresentado na Figura 5.2,
onde a cada bloco corresponde um elemento constituinte do sistema de excitação.
Apesar de inicialmente ter sido proposto a utilização de um rectificador trifásico
optou-se pela utilização de um monofásico por motivos que se prendem com o material
e inexistência de alimentação trifásica no laboratório para testes.
Induzido do
Alternador
Transformador
de Excitação
(monofásico)
Rectificador
Monofásico
Conversor
Flyback
Enrolamento
Indutor do
Alternador
Figura 5.2 – Diagrama de blocos simplificado do sistema de excitação implementado
5.2 Circuito de Potência do Sistema de Excitação
Neste item é apresentado e descrito o circuito de potência, nomeadamente, o
transformador de excitação, o rectificador monofásico e respectivo filtro assim como o
conversor flyback. Todos estes elementos constituem o circuito que irá criar o campo do
alternador, através da injecção de corrente contínua no enrolamento do indutor. Na
Figura 5.3 está apresentado o circuito de potência com todos os elementos que o
constituem.
56
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Conversor
Flyback
Rectificador
Monofásico
Transformador
de Excitação
Figura 5.3 – Circuito de potência com todos os elementos constituintes
5.2.1 Transformador de Excitação
O transformador de excitação é ligado entre duas fases do alternador, obtendo-se a
tensão necessária para a alimentação do campo. A Figura 5.4 mostra o transformador
utilizado para alimentar o sistema de excitação.
Figura 5.4 – Transformador de excitação utilizado
Como a ligação do transformador faz-se no ponto médio do enrolamento do
induzido consegue-se obter uma tensão de alimentação de 190 V. A potência máxima
admissível para a excitação é de 35 W logo, o transformador deve ser dimensionado
para conseguir fornecer esta potência sem danificar os enrolamentos. O transformador
apresenta uma relação de transformação de·
Universidade do Minho
com uma potência de 50 VA.
57
Implementação do Regulador da Corrente de Excitação do Alternador
5.2.2 Rectificador Monofásico
Como a corrente criadora do campo do alternador é contínua, sendo a tensão aos
terminais do gerador alternada, torna-se necessário a sua rectificação a fim de poder ser
aplicada ao conversor flyback para posterior injecção no enrolamento do indutor. Como
dito em 5.1 substitui-se o rectificador trifásico, definido inicialmente, por um
rectificador monofásico não controlado com filtro capacitivo capaz de colocar na saída
uma tensão contínua com o menor ripple possível. A Figura 5.5 mostra o esquema
eléctrico do rectificador monofásico implementado.
Rectificador Monofásico não
Controlador com Filtro Capacitivo
+
Transformador de
Excitação
V0 (Conversor Flyback)
Metade do
Enrolamento do
Induzido
-
Figura 5.5 - Rectificador monofásico implementado ligado a metade do enrolamento do induzido
Pretende-se desta forma rectificar a tensão proveniente do secundário do TE (32 V),
isto porque a tensão de alimentação do circuito de potência é retirada de metade do
enrolamento do induzido onde haverá uma variação na tensão entre 180 e 200 V.
Utilizou-se a ponte rectificadora TS4B05G da Taiwan Semiconductor Company, Ltd
(TSA) de 600 V/4 A para a rectificação. A Figura 5.6 mostra a montagem do
rectificador monofásico [19]. A tensão de saída do rectificador em vazio é igual ao pico
da tensão de entrada e calcula-se a partir da equação 5.1.
(5.1)
Filtro do
Rectificador
Rectificador
TSB05G
Figura 5.6 – Montagem do rectificador monofásico com filtro capacitivo
58
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
5.2.3 Conversor Flyback
A tensão aplicada ao enrolamento indutor resulta da razão cíclica ( ) na gate do
semicondutor utilizado no conversor flyback. O projecto do conversor resulta
essencialmente do dimensionamento do transformador, pois é a partir deste que a
energia proveniente do rectificador monofásico será transferida para a saída do
conversor. O conversor flyback, visto em 4.5.1, apresenta isolamento galvânico entre a
entrada e saída, o que fornece ao sistema mais uma protecção. Em caso de avaria do
interruptor, a alimentação do campo do alternador é cessada não havendo sobre
excitação.
O transformador do conversor flyback, como se viu em 4.5.1, armazena energia
durante o estado a on do semicondutor, transferindo a energia armazenada no núcleo
para a saída durante o estado a off. O transformador deve ser capaz de suportar a energia
aplicada sem destruir os enrolamentos que o constituem. Para tal tornou-se necessário o
cálculo da indutância de magnetização do primário do transformador para a carga
máxima e tensão mínima da entrada. A equação 5.2 mostra como se conseguiu obter o
valor da indutância do primário do transformador [20].
(5.2)
Onde:
Tensão mínima da entrada: devido ao campo magnético remanescente do
entreferro (
90 V)
Razão cíclica máxima admissível pelo conversor (60%)
Frequência de comutação (50 kHz)
Potência de entrada (
)
Factor de ripple (0,4-0,8 para a Europa)
Para o desenho do transformador, as características do núcleo de ferrite usado, foram
aspectos importantes a ter em conta. O conhecimento destas características possibilitou
o cálculo do número mínimo de espiras para o primário do transformador, que se obtém
a partir da equação 5.3 [20].
(5.3)
Onde:
Indutância de magnetização do primário (equação 5.2)
Universidade do Minho
59
Implementação do Regulador da Corrente de Excitação do Alternador
Corrente máxima pulsada admitida pelo semicondutor (datasheet do
MOSFET)
Saturação da densidade de fluxo do núcleo de ferrite (obtida a partir do
datasheet do núcleo de ferrite)
Área da secção transversal do núcleo (obtido a partir do datasheet)
O número de espiras do secundário depende do valor da relação de transformação
pretendida. Neste trabalho optou-se por uma relação de transformação de 1:1, logo o
número de espiras do secundário é igual ao número de espiras obtidas para o primário.
A Figura 5.7 mostra a área de janela (
) e a área da secção transversal (
) do núcleo
de ferrite para um transformador flyback.
Figura 5.7 – Área da janela (
) e área da secção transversal (
) do núcleo de ferrite do transformador do
conversor flyback [20]
O conversor flyback recebe a tensão do rectificador transferindo-a para a saída
(enrolamento do indutor), sendo o seu valor definido pela razão cíclica do PWM (pulsewidth modulation). Como a relação de transformação do transformador flyback é de 1:1,
para uma razão cíclica de 50%, surgirá na saída do conversor uma tensão igual à tensão
de entrada. Ao diminuir a razão cíclica do valor de PWM na gate do semicondutor, a
tensão de saída diminui, se por outro lado o valor da razão cíclica aumenta, o valor da
tensão de saída aumenta, de acordo com a equação 4.12 vista no capítulo anterior. De
notar que, para este trabalho, por razões que se prendem com a construção do
transformador, a razão cíclica máxima admitida pelo conversor é de 60%. Desta forma
consegue-se uma tensão máxima na saída de 51 V para uma tensão de entrada de 42 V,
que é a tensão à saída do rectificador para a tensão de geração nominal.
Na Figura 5.8 pode-se observar o esquema do circuito do conversor flyback. A
bobina L1 tem como função evitar as variações bruscas da corrente, fornecendo na saída
do conversor uma corrente com um ripple pequeno. O circuito constituído por Cs, Rs e
Ds protege o MOSFET contra picos de tensão resultantes da comutação deste devido às
indutâncias (incluindo as parasitas) existentes no circuito, este tem o nome de circuito
Snubber.
60
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
1:1
D1
L1
+
C1
Cs
V0
Rs
T1
Vrect
Ds
PWM
Q1
Figura 5.8 – Esquema do circuito do conversor flyback implementado
Características do MOSFET utilizado [21]:
Referência – IRFPE40
Tensão máxima drain-source – 800V
Corrente máxima pulsada na drain – 22A
– 2Ω
A Figura 5.9 mostra o circuito implementado do conversor flyback numa placa
perfurada, onde se pode verificar todos os elementos constituintes do mesmo.
IRFPE40
Circuito
Snubber
Transformador
Flyback
Figura 5.9 – Circuito do conversor flyback implementado
5.3 Circuito de Comando do Sistema de Excitação
O circuito de comando, composto por diferentes circuitos individuais, é responsável
pela aquisição da tensão aos terminais do alternador e da corrente de excitação assim
como do comando do MOSFET, tudo isto, feito a partir de uma unidade central, o
Universidade do Minho
61
Implementação do Regulador da Corrente de Excitação do Alternador
microcontrolador. O diagrama de blocos da Figura 5.10 apresenta a constituição do
circuito de comando.
Unidade de Medida
Unidade de Controlo
Sensor de
Tensão
Microcontrolador
Circuito de
Drive do
MOSFET
Gate do
Mosfet
Sensor de
Corrente
Figura 5.10 – Diagrama de blocos do circuito de comando
O circuito de comando pode ser dividido em duas unidades distintas: a unidade de
medida e a unidade de controlo. A conjugação das duas unidades proporciona o
funcionamento do regulador da corrente de excitação conforme o pretendido.
5.3.1 Unidade de Medida
A unidade de medida consiste basicamente na medição e processamento do valor da
tensão aos terminais do alternador e da corrente contínua de excitação do mesmo. É a
partir das medições destes valores que o sistema de controlo actualiza constantemente o
valor da tensão de saída do alternador, precavendo qualquer mau funcionamento com a
medição da corrente de excitação. Para tal utilizaram-se sensores de efeito Hall para as
respectivas medições. Uma das mais-valias destes sensores é a possibilidade de
permitirem medições de valores em CA e CC. A Figura 5.11 mostra a placa da unidade
de medida do circuito de comando.
Leitura e alimentação
do sensor de corrente
Sensor de Corrente
Sensor de tensão
Entrada da tensão aos
terminais do alternador
Figura 5.11 – Placa da unidade de medida do circuito de comando
62
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
5.3.1.1 Sensor de Tensão de Efeito Hall
O sensor de tensão de efeito Hall utilizado para a medição da tensão do alternador
foi o LV 25-P da LEM, cuja representação está na Figura 5.12 (a). A Figura 5.12 (b)
mostra o esquemático das ligações externas do sensor. A tensão e corrente nominais
são, respectivamente, 500 V e 10 mA e apresenta uma razão de conversão de
2500:1000. A alimentação pode ser: -15 V, GND e +15 V ou -12 V,GND, e +12 V. A
resistência
deve ser dimensionada de modo que a corrente que nela passe não exceda
o valor nominal do sensor (10 mA). Da mesma forma, a resistência
, deve ser
calculada para que a sua tensão esteja dentro dos valores especificados no datasheet
[22].
(a)
(b)
Figura 5.12 – Sensor de tensão de efeito Hall LV 25-P da LEM [22]
Os valores das resistências
e
podem ser calculados de acordo com as
equações 5.4 e 5.5.
(5.4)
(5.5)
O valor máximo de tensão que o sensor consegue ler está representado por
sendo
a corrente nominal no primário do sensor. A resistência
,
deve ser
projectada para o nível de tensão desejado no terminal M. Como o microcontrolador
utilizado compreende nas suas entradas valores de tensão entre 0 e 5 V, o valor máximo
admitido no terminal M é de 5 V.
5.3.1.2 Sensor de Corrente de Efeito Hall
Para a medição da corrente de excitação do alternador utilizou-se o sensor de
corrente de efeito Hall LA 55-P da LEM, cuja representação está na Figura 5.13 (a).
Universidade do Minho
63
Implementação do Regulador da Corrente de Excitação do Alternador
Como o valor máximo da corrente de excitação é de 690 mA e o sensor tem capacidade
de leitura até 50 A (rms), para uma medição mais precisa de valores baixos de corrente,
tornou-se necessário adicionar enrolamentos no primário do sensor (50 voltas). O sensor
de corrente apresenta uma razão de conversão de 1:1000. Da mesma forma que o sensor
de tensão, o sensor de corrente pode ser alimentado: -15 V, GND e +15 V ou
-12 V,GND, e +12 V. A Figura 5.13 (b) mostra o esquema das ligações do sensor [23].
(a)
(b)
Figura 5.13 - Sensor de corrente de efeito Hall LA 55-P da LEM [23]
A resistência
deve ser projectada para o nível de tensão desejado no terminal M,
da mesma forma que no sensor de tensão. A equação 5.6 mostra como se calcula a
resistência
, onde,
corresponde à máxima tensão desejada no terminal M e
à
corrente nominal no secundário do sensor.
(5.6)
5.3.1.3 Circuito de Condicionamento de Sinal
Para que os valores da tensão medidos nos terminais do alternador possam ser
interpretados e convertidos para o microcontrolador, é necessário adapta-los para os
níveis de tensão por ele admitidos (0-5 V). O conversor analógico digital (CAD) apenas
converte valores positivos, sendo indispensável a deslocação do sinal, uma vez que na
saída do sensor, os valores podem ser positivos ou negativos, pois trata-se de uma
tensão alternada. Para o deslocamento do sinal utilizou-se um circuito muito simples:
trata-se da implementação de um circuito somador. Este circuito é constituído por um
amplificador operacional e resistências dimensionadas para que se consiga obter os
valores de tensão dentro dos níveis desejados. A Figura 5.14 apresenta o esquema do
circuito implementado.
64
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Rf
R1
v1
i1
if
+15V
R2
v2
-
V0
i2
+
-15V
Figura 5.14 – Circuito de condicionamento de sinal implementado [24]
Como se pode verificar, o circuito apresenta duas entradas (
saída ( ) depende das entradas e dos valores das resistências (
). O sinal de
) que são as
responsáveis pelo ganho do somador. Sabendo-se que a entrada inversora é um ponto de
terra virtual, as correntes do circuito ( ,
e
) podem ser calculas a partir das
equações 5.7, 5.8 e 5.9.
(5.7)
(5.8)
Pela soma das correntes calculadas obtém-se a corrente
a partir da equação 5.9.
(5.9)
Sabendo que a tensão de saída ( ) do circuito somador é dada pela equação 5.10,
pode-se obter
, em relação a
,
e
, a partir da equação 5.11.
(5.10)
(5.11)
A tensão na saída é a soma pesada das tensões de entrada. O peso de cada parcela
dessa soma pode ser ajustado pelo valor da resistência correspondente. Este método
torna os cálculos de dimensionamento do circuito bastante simples, uma vez que se
pode ajustar o ganho de cada entrada de forma separada [24]. O maior problema na
implementação deste circuito é o facto de este apresentar uma configuração inversora,
tornando a tensão do sinal de saída negativa para valores positivos nas entradas. Como o
sensor tanto funciona para valores negativos como positivos, invertendo-se as ligações,
o problema da inversão do sinal no somador fica resolvido. Para o deslocamento do
Universidade do Minho
65
Implementação do Regulador da Corrente de Excitação do Alternador
sinal, ao contrário de se somar um valor positivo soma-se um valor negativo. Desta
forma consegue-se obter um sinal de saída positivo. A Figura 5.15 mostra o circuito
somador implementado.
15V
GND
v2
AmpOp
Figura 5.15 – Placa do circuito de condicionamento de sinal
Para dimensionar o circuito somador teve-se em atenção que o valor máximo da
tensão de saída ( ) deveria ser o máximo admitido pelo microcontrolador (5 V) e que,
para uma tensão de 0 V deveria corresponder metade do valor máximo, ou seja, 2,5 V.
Na escolha dos valores das resistências do circuito começou-se por definir o valor da
resistência
. O valor da resistência
é dimensionado de forma a ajustar o valor de
tensão que se pretende somar na saída. Na entrada
aplicou-se uma tensão igual à
tensão de alimentação negativa do amplificador operacional (AmpOp). Os valores das
resistências a utilizar determinou-se a partir das equações 5.10 e 5.11.
5.3.2 Unidade de Controlo
O valor da corrente injectada no enrolamento do indutor é controlado a partir da
razão cíclica aplicada ao MOSFET, através do PWM gerado no microcontrolador.
Como o PWM não pode ser aplicado directamente ao conversor flyback tornou-se
necessário a implementação de um circuito de interface entre o microcontrolador e o
conversor. O circuito em causa é constituído por um acoplador óptico que oferece
isolamento galvânico entre o circuito de comando e o circuito de potência. O acoplador
utilizado foi o HCPL3120 da Hewlett Packard, este assegura ainda a comutação do
MOSFET, circuito de driver. A Figura 5.16 mostra o digrama funcional do driver
utilizado.
Figura 5.16 – Diagrama funcional do driver HCPL-3120 [25]
66
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Para que o isolamento entre o circuito de comando e o circuito de potência seja
completamente assegurado, as massas de ambos devem ser diferentes, logo é necessário
o uso de diferentes fontes de alimentação nos dois circuitos.
Como mencionado, o HCPL-3120 para além de oferecer isolamento entre os
circuitos de comando e potência, possibilita a obtenção de níveis de tensão adequados
para a comutação eficaz do MOSFET. No funcionamento do MOSFET, é necessário
que a tensão da gate seja superior à tensão da source para abrir um canal no MOSFET,
que proporcione a passagem de corrente. Para que o MOSFET deixe de conduzir é
impreterível que a tensão na gate seja inferior à tensão de threshold (
mínima
), que é a tensão
para que haja canal. Normalmente a comutação dos MOSFET faz-se entre
12 V, pois desta forma, o semicondutor interrompe o circuito mais rapidamente que a
comutação entre (0 e 12 V). A tensão máxima gate-source (
) é dada pelo datasheet
do fabricante. A Figura 5.17 apresenta o esquema do circuito implementado.
+5V
270
+5V
+12V
Sinal de
Controlo
(PWM)
10
Conversor
Flyback
100nF
-12V
Figura 5.17 – Esquema do circuito de controlo implementado [25]
A Figura 5.18 mostra o interface entre o circuito de comando e o circuito de
potência implementado.
Circuito de Drive
Figura 5.18 – Circuito de drive entre o circuito de comando e o circuito de potência
5.3.3 Microcontrolador do Sistema Implementado
O microcontrolador é parte essencial na regulação da corrente de excitação do
alternador. É a partir deste que todos os sinais são processados, tanto os sinais recebidos
Universidade do Minho
67
Implementação do Regulador da Corrente de Excitação do Alternador
da unidade de medida como o sinal enviado para a unidade de controlo. Os sinais
recebidos dos sensores de tensão e corrente são recebidos pelo microcontrolador através
do CAD, este converte os sinais analógicos em digitais de maneira a efectuar o controlo
do sistema, enviando para a unidade de controlo um sinal capaz de regular a tensão de
saída do alternador, assim como evitar sobretenções na geração e sobre excitação. O
diagrama de blocos representativo da utilização do microcontrolador encontra-se na
Figura 5.19.
Unidade de
Medida
CAD
PWM
Unidade de
Controlo
PIC 18F4331
Figura 5.19 – Diagrama de blocos da utilização do microcontrolador
A escolha do microcontrolador a utilizar na implementação baseou-se sobretudo nas
necessidades do projecto. O microcontrolador PIC18F4331, produzido pela Microchip,
foi a escolha para o controlo do sistema. Este microcontrolador é disponibilizado
gratuitamente pelo fabricante, o que se tornou também, um aspecto importante na sua
escolha. O software necessário na sua programação é também fornecido gratuitamente.
Apenas o programador não foi conseguido gratuitamente, mas o seu custo tornou-se
vantajoso quando comparado com outros do mesmo género. Para além dos aspectos
económicos, outra vantagem da utilização deste microcontrolador é a necessidade de
poucos componentes e um circuito de baixa complexidade para o seu funcionamento e
programação, podendo ainda ser programado no próprio circuito onde opera.
Em termos de características técnicas, o microcontrolador PIC 18F4331 apresenta-se
como uma boa opção para controlo de processos, especialmente para electrónica de
potência, pois apresenta um módulo de PWM especialmente dedicado para esta área da
electrónica. Destaca-se ainda a boa funcionalidade e precisão do CAD que possui.
Para este trabalho utilizou-se uma saída de PWM de maneira a gerar o sinal de
controlo para o MOSFET do conversor flyback, utilizou-se também duas entradas para
conversão analógica digital, estas recebem os sinais provenientes dos sensores de
corrente e tensão. Utilizou-se ainda as entradas para interrupções externas como forma
de se poder fazer o interface entre o utilizador e o sistema, para alterações dos
parâmetros pré-definidos. Ainda para o interface com o utilizador, foram configurados
portos do microcontrolador para ligação de um LCD (Liquid Crystal Display), que para
68
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
além do interface, permite a monitorização quer da tensão gerada quer da corrente de
excitação do alternador.
Para a inicialização do módulo PWM deve-se ter em conta a frequência de
funcionamento pretendida. O valor da frequência e razão cíclica do PWM podem ser
actualizadas em tempo real, embora neste trabalho apenas se altere o valor da razão
cíclica. Quanto às saídas de PWM podem ser usadas oito em modo independente ou no
máximo quatro em modo complementar, ou seja, para cada uma das quatro saídas
existem outras quatro invertidas.
O CAD existente no PIC18F4331 apresenta uma resolução de 10 bits e permite
obter 200000 amostras por segundo (apenas num canal), ou seja, uma amostra a cada
. Pode-se ainda efectuar duas leituras simultâneas, pois este microcontrolador
apresenta duas entradas sample and hold, o que se torna bastante útil para a medição da
tensão gerada e corrente de excitação no mesmo instante [26].
Para se proceder à programação do microcontrolador é necessário um circuito de
interface que permite a ligação entre ele e o computador. Para este trabalho utilizou-se o
programador ICD2 In-Circuit Debugger & Programmer da Figura 5.20.
Figura 5.20 – Programador e depurador ICD2
Para se poder desenvolver programas e enviá-los para o microcontrolador é
necessário um software de desenvolvimento. Utilizou-se a ferramenta fornecida
gratuitamente pela Microchip, o MPLAB. Os microcontroladores da família PIC podem
ser programados tanto em linguagem Assembly como em linguagem C, sendo que, no
desenvolvimento do sistema proposto, utilizou-se a linguagem C por se tratar de uma
linguagem de alto nível o que possibilita mais rapidez de implementação, tornando o
código mais perceptível. Para a utilização desta linguagem é necessário um compilador
adequado que funcione a partir da ferramenta de programação MPLAB. Para tal,
utilizou-se o compilador CCS C Compiler que apresenta várias bibliotecas de fácil
utilização para os diferentes módulos do PIC18F4331. A Figura 5.21 mostra um
projecto elaborado no MPLAB.
Universidade do Minho
69
Implementação do Regulador da Corrente de Excitação do Alternador
Figura 5.21 – Ambiente da ferramenta de programação MPLAB
Depois de escolhido o microcontrolador, definidos quais os módulos e entradas
necessárias na elaboração do projecto e de perceber o funcionamento de cada um deles,
procedeu-se à elaboração do circuito do microprocessador. Em primeiro lugar
projectou-se o circuito de maneira a que todos os elementos necessários para o correcto
funcionamento do regulador fossem introduzidos no mesmo esquema sendo depois
desenhada a placa de circuito impresso, através da ferramenta de projecto de circuitos
(Eagle), também esta disponibilizada gratuitamente. A Figura 5.22 mostra o esquema
eléctrico das ligações do microcontrolador, enquanto a Figura 5.23 apresenta a placa de
circuito impresso resultante.
MCRL
10 K
PGD
Valor da Tensão
Valor da Corrente
5V
18pF
18pF 20 MHz
INT0
LCD_enable
LCD_rs
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
PIC 18F4331
Reset Manual
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
PGC
PGC
PWM
5V
1K
LCD_B7
LCD_B6
LCD_B5
LCD_B4
INT2
INT1
LCD_rw
Figura 5.22 – Esquema eléctrico da placa do microcontrolador PIC18F4331
Da Figura 5.22 é de salientar o uso de uma resistência de pull-down na saída PWM
do PIC18F4331. Esta garante que, quando não existir qualquer sinal, o semicondutor do
conversor flyback mantém-se no estado de não condução, precavendo curto-circuitos no
70
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
circuito de potência. A inclusão de um reset manual, tem como finalidade reiniciar o
sistema caso se torne necessário. As interrupções externas são utilizadas na interface
com o utilizador, para o inicio e fim do processo e para a alteração do valor de
referência da tensão de geração, estas foram definidas de maneira a actuarem no sistema
sempre que ocorra uma transição descendente no sinal correspondente a cada uma delas,
ou seja, sempre que a tensão na entrada do pino alterar de +5 V para 0 V. As ligações
efectuadas aos pinos MCLR, PGD, PGC e PGM têm como função o interface entre o
computador pessoal e o microcontrolador. É a partir destes pinos que se procede à sua
programação. Para além das ligações efectuadas, foram precavidos pinos do
microcontrolador para qualquer necessidade no desenvolvimento do processo de
geração de energia.
Figura 5.23 – Desenho da placa de circuito impresso do microcontrolador PIC18F4331 e respectivas entradas e
saídas
Todo o circuito do microcontrolador, interface com o utilizador e o LCD para
monitorização podem ser vistos na Figura 5.24.
Interrupções
Externas
Circuito do
Microcontrolador
LCD
Figura 5.24 – Circuito do microcontrolador implementado
Universidade do Minho
71
Implementação do Regulador da Corrente de Excitação do Alternador
5.4 Alimentação do Circuito de Comando
Como referido anteriormente, o sistema implementado deve ser totalmente
autónomo no controlo da corrente de excitação do alternador, retirando todas as
alimentações necessárias ao funcionamento dos terminais do alternador. Para tal
tornou-se necessário o projecto de um método capaz de fornecer ao circuito de comando
as tensões necessárias para o seu funcionamento. Tanto a partir da indução
remanescente, para o inicio do processo, como com o sistema já em operação, o circuito
de comando deve garantir o correcto funcionamento de todo o procedimento.
Desta forma, desenvolveu-se um circuito capaz de aplicar à unidade de medida
tensões de
15 V, e garantir que a tensão no circuito do microcontrolador é de
5 V,
qualquer que seja o valor da tensão de geração. Da mesma forma, deve-se garantir que
ao circuito de controlo são aplicadas tensões entre
12 V, para que seja possível a
comutação do semicondutor presente no conversor flyback. O princípio de
funcionamento dos dois circuitos desenvolvidos, alimentação do circuito de
medida/circuito do microcontrolador e circuito de controlo, é o mesmo. A construção de
duas alimentações diferentes deveu-se ao facto de ser necessário o isolamento entre o
circuito de potência e o circuito de comando. Sendo os dois circuitos de igual
constituição, apenas diferindo a tensão fornecida, mostrar-se-á apenas como se
conseguiu obter a alimentação do circuito de medida/circuito do microcontrolador,
sendo posteriormente apresentados os resultados de ambos os circuitos. Para a
alimentação do circuito de medida desenvolveu-se, em primeiro lugar, um conversor
step-down ajustável capaz de apresentar na sua saída uma tensão constante desde o
inicio do processo, a partir da energia remanescente, até que o alternador forneça a
tensão nominal de funcionamento. O circuito desenvolvido encontra-se na Figura 5.25
Feedback
L1
Output
Vin
68uH
LM2592HV-5.0
Vin_min=90V
Vin_max=200V
Cin
D1
On/Off
330uF
Vout = 5V
Cout
GND
330uF
15,3:1
Figura 5.25 – Circuito de alimentação do circuito do microcontrolador e pré-alimentação do circuito de
medida
O regulador utilizado para o desenvolvimento do circuito anterior foi o LM2592HV5.0 da National Semiconductor. Este regulador mantém a tensão de saída constante
72
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
(+5 V), para uma variação da tensão de entrada entre 7 e 60 V e consegue-se fornecer à
carga corrente entre 0,2 e 2 A [27].
O circuito da figura anterior permite obter uma tensão fixa dentro da gama de
tensões fornecidas pelo alternador. Com a tensão obtida consegue-se alimentar o
circuito do microcontrolador mas são ainda precisas outras duas tensões para a
alimentação do circuito de medida (+15 V/-15 V). Para se conseguir obter as tensões
pretendidas utilizou-se um IC (Integrate Circuit) da Maxim, o MAX743CPE. Este IC
permite o controlo de uma fonte comutada de maneira a criar duas saídas com tensões
de sinais opostos para uma entrada de tensão de +5 V. Permite a saída de +15/-15 V ou
+12/-12 V, dependendo da ligação feita. A Figura 5.26 mostra o esquema típico do
regulador utilizado.
Figura 5.26 – Circuito típico do IC MAX743CPE [28]
Como referido anteriormente, a alimentação do circuito de medida tem a mesma
constituição que o circuito de controlo. Para o circuito de medida as tensões de saída
pretendidas são +15 V e -15 V, enquanto para o circuito de controlo as tensões
esperadas são -12 V e +12 V. Para se conseguir as tensões para o circuito de medida,
ligou-se o pino onze do IC (
) à massa, enquanto, que no circuito de controlo esse
mesmo pino foi ligado a +5 V.
Da conjugação dos dois circuitos descritos, resultou a alimentação de todo o sistema
de comando a partir dos enrolamentos do induzido, podendo desta forma iniciar-se o
processo de geração de energia sem o auxílio de fontes externas. A partir destes
circuitos foram desenvolvidas as placas de circuito impresso, tanto para a alimentação
do circuito de medida, como do circuito do microcontrolador e também do circuito de
controlo. O desenho destas placas, tal como na placa do microcontrolador, foi
desenvolvido a partir da ferramenta de desenho de circuitos Eagle. A Figura 5.27
mostra o desenho das placas implementadas.
Universidade do Minho
73
Implementação do Regulador da Corrente de Excitação do Alternador
(a)
(b)
Figura 5.27 – Desenho das placas de circuito impresso:
(a) alimentação do circuito de medida e microcontrolador, (b) alimentação do circuito de controlo
As placas de circuito impresso resultantes encontram-se na Figura 5.28.
LM2592HV-5.0
LM2592HV-5.0
MAX743CPE
MAX743CPE
(a)
(b)
Figura 5.28 – Placas de alimentação do circuito de comando:
(a) circuito de medida e microcontrolador (b) circuito de controlo
5.5 Algoritmo de Controlo do Sistema Implementado
Para o correcto funcionamento do sistema implementado, quer no inicio do processo
quer na regulação da tensão de saída do alternador, tornou-se necessária a programação
do microcontrolador. Como no inicio do processo é fundamental colocar a tensão aos
terminais da máquina dentro de valores nominais (380 V) e só depois proceder ao
controlo da corrente de excitação, serão apresentados dois algoritmos diferentes um para
cada etapa. Será ainda apresentado o controlador PI implementado para o controlo da
tensão de saída.
74
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
5.5.1 Pré-Excitação do Alternador
Antes de se proceder à regulação da tensão de saída do alternador, é necessário
injectar uma corrente contínua no enrolamento do indutor capaz de colocar aos
terminais da máquina a tensão desejada para o funcionamento. Esta etapa do
funcionamento do regulador de tensão é conhecida como pré-excitação. Para se cumprir
esta etapa recorreu-se à indução remanescente existente no entreferro do alternador,
aplicando aos terminais do enrolamento do indutor a máxima tensão possível fornecida
pelo conversor flyback. A máxima tensão possível consegue-se a partir do máximo valor
admissivel de razão cíclica de PWM aplicado à gate do MOSFET. Com o
funcionamento do conversor no seu valor máximo, é injectada uma corrente no
enrolamento do indutor que vai aumentando à medida que a tensão aos terminais do
alternador aumenta. Quando a tensão no enrolamento do induzido atinge o valor
pretendido (380 V) dá-se inicio ao controlo da tensão de saída em malha fechada, ou
seja, inicia-se o controlador PI.
Antes de se iniciar a excitação do alternador, o microcontrolador deve iniciar todos
os valores, variáveis e módulos a utilizar, necessários para o funcionamento e
monitorização do sistema, tanto para a pré-excitação como para posterior controlo da
tensão de saída. Para a medição dos valores da corrente de excitação e tensão gerada é
iniciado o CAD em modo de leitura simultânea de forma que ambas as grandezas
possam ser medidas no mesmo instante. O módulo PWM é iniciado com uma
frequência de 50 kHz e definido qual o valor máximo de razão cíclica. Para posterior
controlo da tensão de saída é iniciado o Timer1 que dará o período de amostragem. O
timer foi definido para um período de contagem de 1 ms. As interrupções externas
existentes no microcontrolador foram também definidas, sendo necessárias para o
interface entre o sistema e o utilizador. Para além disto, foram definidas variáveis
auxiliares necessárias para o correcto funcionamento do programa. A Figura 5.29
apresenta o fluxograma do algoritmo proposto para a pré-excitação do alternador.
Universidade do Minho
75
Implementação do Regulador da Corrente de Excitação do Alternador
Inicio
Inicia ADC
Inicia Timer1
Duty=valor_max
Não
Tensão >= 380V
Sim
Inicia Controlador PI
Figura 5.29 – Fluxograma da pré-excitação do alternador
5.5.2 Controlo em Malha Fechada da Tensão de Saída
Para o controlo em malha fechada da tensão de saída do alternador usou-se o
controlador padrão para os sistemas de excitação, o controlador PID. Para este trabalho
usaram-se apenas as acções proporcional-integral. Esta opção deveu-se principalmente à
facilidade de implementação, quando comparado com a inclusão da acção derivativa.
A tensão de saída depende da corrente de excitação, variável manipulada, controlada
a partir do PWM aplicado ao conversor flyback. É a partir da alteração desta variável
que se consegue a tensão de saída (variável de processo) desejada, definida a partir da
variável de referência inicializada para o valor desejado da tensão de saída. É a partir do
erro (diferença entre a variável de referência e variável de manipulada) que a variável
manipulada será alterada. A Figura 5.30 mostra o diagrama de blocos do controlador PI
apresentado.
E SV MV
Tensão de
Referência
Tensão de
Saída
+
SP
Kp
PWM
MV
Et
Figura 5.30 – Diagrama de blocos do controlador PI implementado
76
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Após da inicialização do microcontrolador e do alternador apresentar aos seus
terminais a tensão pretendida, obtida a partir da pré-excitação, torna-se necessário a sua
regulação. Esta regulação fez-se a partir do controlador PI, onde para variações da
tensão de saída o valor da corrente de excitação aumenta ou diminui de acordo com a
alteração registada aos terminais do alternador. Da diferença entre a variável de
referência e a variável manipulada, resulta o erro do sistema. É a partir deste erro que se
consegue a acção proporcional para colocar a variável manipulada no valor da variável
de referência. A acção integral proporciona ao sistema uma aproximação ao valor da
tensão desejada de uma maneira mais suave, tornando o sistema mais estável,
diminuindo também o erro residual presente quando se usa apenas a acção proporcional.
O ganho das acções proporcional e integral deve ser definido para que o sistema
apresente uma resposta o mais rápida e estável possivel.
Depois do alternador se encontrar na sua tensão nominal, inicia-se o processo de
regulação da tensão para quando existirem variações na carga ligada ao alternador. A
Figura 5.31 representa o fluxograma resultante do controlo e como proceder a alterações
dos parâmetros do sistema, com regulador de tensão em funcionamento.
Inicio
Definir Valor de Referência (380V)
Declarar e inicializar temporizadores (Timer’s) e variaveis auxiliares
Inicializar ADC e vector para medição a parir da média deslizante
Configurar PWM
Inicializa Interrupções Externas (INT0,INT1,INT2)
Aguarda Ocorrencia da
Interrupção 0
(INT0)
Pré Excitação do Alternador
Leitura dos Valores da
Tensão e Corrente
Determinar parâmetros
do controlador
Diminui Razão
Ciclica
Aumenta Razão
Ciclica
Não
Não
Erro=0
?
Erro>0
?
Sim
Sim
Figura 5.31 – Fluxograma do controlador PI do sistema de regulação
Universidade do Minho
77
Implementação do Regulador da Corrente de Excitação do Alternador
Como dito anteriormente o sistema deve ser capaz de fornecer tensões de geração
entre 380 e 400 V. Para tal e para definir o inicio e final do processo de geração
utilizou-se as interrupções externas permitidas pelo microcontrolador. É a partir destas
que se define quando se inicia a pré-excitação e posterior controlo em malha fechada do
valor da tensão aos terminais do alternador. Ao ser activada a interrupção externa 0
(INT0) pela primeira vez, o sistema é iniciado como referido anteriormente. No caso de
anteriormente ter sido activada a interrupção externa 1 (INT1) é incrementado numa
unidade o valor de referência para a tensão aos terminais do alternador. No caso da
interrupção externa 2 (INT2), o processo é semelhante ao anterior com a diferença que,
ao contrário do anterior, ao ser activada sem a anterior activação da interrupção INT1 o
sistema cessa a excitação do alternador, no caso da anterior activação de INT1 é
incrementado o valor de referência da tensão de geração numa unidade. A interrupção
externa 1 apenas inicia e finaliza a alteração do valor da tensão de referência para a
tensão gerada. O fluxograma da Figura 5.32 mostra como foi feito este interface com o
utilizador.
Interrupção 0
(EXT0)
Interrupção 2
(EXT2)
Não
Ocorreu
INT1
Inicia
Processo
Finaliza
controlo PI
Sim
Não
Ocorreu
INT1
Sim
Decrementa
Valor de
Referencia
Incrementa
Valor de
Referencia
Saída da
Interrupção
(EXT0)
Saída da
Interrupção
(EXT2)
Interrupção 1
(EXT1)
Finaliza
Alteração do
Valor de
Referencia
Não
Sim
1ª Vez ?
Inicia Alteração
do Valor de
Referencia
Saída da
Interrupção
(EXT1)
Figura 5.32 – Fluxograma do funcionamento do interface com o utilizador
78
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
5.6 Descrição do Sistema de Excitação Completo
Para uma melhor percepção dos vários blocos que compõem o sistema de excitação
desenvolvido veja-se o diagrama de blocos da Figura 5.33. Como se pode verificar, o
rectificador monofásico é alimentado a partir dos terminais do alternador. A tensão
rectificada é aplicada ao conversor flyback, este controla a tensão aplicada ao
enrolamento indutor a partir do sinal recebido do circuito de comando, constituído pela
unidade de medida e pela unidade de controlo, onde, o microcontrolador comanda todo
o processo.
Induzido do
Alternador
Enrolamento Indutor
do Alternador
Sensor de
Tensão
Rectificador
Monofásico
Circuito
Somador
Filtro
Capacitivo
Microcontrolador
Conversor
Flyback
Drive do
MOSFET
Sensor de
Corrente
Figura 5.33 – Diagrama de blocos do sistema completo
A Figura 5.34 apresenta a montagem completa do regulador.
Figura 5.34 – Regulador da corrente de excitação implementado completo
Universidade do Minho
79
Regulador da Corrente de Excitação de um Alternador
Capítulo 6
Resultados Experimentais do Regulador
Implementado
Neste capítulo são apresentados os resultados obtidos do regulador de tensão
implementado. Depois de finda a implementação prática e respectivos testes era
esperado o teste com o sistema completo, regulador de tensão/alternador e verificar o
funcionamento da geração de tensão em malha fechada. Por razões alheias ao trabalho,
o teste com o sistema completo não foi possível, por esse motivo, todos os resultados
apresentados ao longo deste capítulo foram obtidos apenas de testes laboratoriais onde
se apresentarão os resultados para cada bloco constituinte do regulador apresentado.
6.1 Resultados do Circuito de Potência
O circuito de potência, como visto anteriormente, é composto pelo transformador de
excitação, rectificador monofásico e respectivo filtro, e pelo conversor flyback. Neste
item serão mostrados os resultados obtidos no circuito de potência.
6.1.1 Rectificador Monofásico com Filtro Capacitivo
Com o rectificador monofásico esperava-se a conversão da tensão retirada aos
terminais do alternador para uma tensão contínua, para posterior aplicação no conversor
flyback. A Figura 6.1 mostra a tensão no secundário do TE e a tensão na saída do
rectificador. Como se pode verificar, a tensão de saída do transformador, depois da
passagem pelo rectificador e respectivo filtro, apresenta uma tensão contínua, cujo valor
é aproximadamente o valor de pico da tensão na entrada do rectificador. Com o filtro
capacitivo consegue-se diminuir o ripple fazendo com que a tensão contínua fornecida
apresente uma forma de onda sem grandes oscilações. A medição feita resultou da
aplicação da tensão máxima no primário do TE que não é mais que a tensão máxima
admissível, ou seja 200 V, que corresponde à tensão máxima possível de geração
(400 V), isto porque, como se referiu, a tensão do sistema é retirada de metade do
enrolamento do induzido.
Universidade do Minho
81
Resultados Experimentais do Regulador Implementado
Tensão
Rectificada
Tensão no
Secundário do TE
Figura 6.1 – Tensão no secundário do transformador e saída do rectificador monofásico
6.1.2 Conversor Flyback
O conversor flyback permite colocar na saída uma tensão superior ou inferior à da
entrada dependendo da razão cíclica aplicada no semicondutor. A Figura 6.2 apresenta
as formas de onda na entrada e na saída do conversor para uma razão cíclica de 45%.
Tensão de
Entrada
Tensão de
Saída
Figura 6.2 – Tensão na entrada e saída do conversor flyback
Ainda no conversor flyback, para a protecção do semicontrolador, desenvolveu-se
um circuito de snubber capaz de evitar excesso de tensão no semicondutor, o que
poderia levar ao seu mau funcionamento e até à avaria. A Figura 6.3 apresenta os
resultados obtidos da tensão
82
no MOSFET utilizado no conversor flyback.
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Figura 6.3 – Tensão no semicondutor quando em comutação (
Como se pode verificar, na tensão
)
existem picos de tensão de baixo valor,
mostrando-se aqui o bom funcionamento do circuito de snubber utilizado para a sua
extinção.
6.1.3 Consumos do Circuito de Potência
Todo o sistema implementado obtém as tensões de funcionamento dos terminais do
alternador, como tal, torna-se interessante conhecer as tensões e correntes para os
valores nominais. A partir daqui consegue-se obter as potências do sistema, podendo-se
ainda verificar a THD (taxa de distorção harmónica) do sistema implementado medida
no primário do TE. A Figura 6.4 (a) apresenta a tensão e corrente consumidas pelo
regulador da corrente de excitação, a medição foi feita tendo em conta a tensão máxima
possível de ser gerada (400 V), com o conversor a funcionar para fornecer ao
enrolamento do indutor a corrente nominal de funcionamento em vazio (
400 mA). A
Figura 6.4 mostra o conteúdo harmónico do regulador implementado.
(a)
(b)
Figura 6.4 – Valores na entrada do regulador da corrente de excitação:
(a) Tensão e corrente (b) Taxa de distorção harmónica
Universidade do Minho
83
Resultados Experimentais do Regulador Implementado
6.2 Resultados do Circuito de Comando
Como referido anteriormente, o circuito de comando divide-se em duas unidades
distintas, a unidade de medida e a unidade de controlo. Na unidade de medida estão
presentes os elementos capazes de medir e calcular a tensão no enrolamento do induzido
e a corrente de excitação. No circuito de controlo apresenta-se o isolador óptico que
possibilita o isolamento entre o circuito de comando e circuito de potência assim como
o drive que actua sobre o MOSFET do conversor flyback.
6.2.1 Unidade de Medida
Da unidade de medida esperava-se a correcta obtenção dos valores da corrente de
excitação e da tensão aos terminais da máquina. A Figura 6.5 e Figura 6.6 apresentam
os resultado da medição da corrente de excitação do alternador para dois valores
diferentes, o que mostra a medição correcta do valor da corrente.
Figura 6.5 – Medição do valor da corrente de excitação para 500 mA
Figura 6.6 – Medição do valor da corrente de excitação para 200 mA
84
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Para além da corrente de excitação obteve-se o valor da tensão nos terminais do
alternador. É a partir desta tensão que o sistema ajusta a geração para o valor
pretendido, definido pela referência. A Figura 6.7 e a Figura 6.8 mostram os resultados
obtidos para a medição da tensão nos terminais do alternador, também para dois valores
diferentes o que prova o bom resultado do circuito de medida.
Figura 6.7 – Medição do valor da tensão gerada (metade do enrolamento do induzido-190 V)
Figura 6.8 – Medição do valor da tensão gerada (metade do enrolamento do induzido-116 V)
6.2.2 Unidade de Controlo
A unidade de controlo tem como função aplicar ao conversor flyback um sinal de
PWM, com o valor de razão cíclica definido pelo algoritmo de controlo, capaz de
colocar aos terminais do alternador uma tensão constante. No microcontrolador é gerado
esse sinal e enviado para a unidade de controlo, que a partir do drive é aplicado à gate
do MOSFET do conversor flyback.
Universidade do Minho
85
Resultados Experimentais do Regulador Implementado
O sinal gerado no microcontrolador (PWM) apresenta uma tensão de 0 ou 5 V. Ao
ser enviado para o drive (HCPL3120), o sinal é alterado para níveis de tensão
compreendidos entre
12 V de maneira a poder ser aplicado na gate do MOSFET.
Desta forma, quando na saída do microcontrolador o sinal de PWM se encontra no nível
baixo (0 V), a saída do drive do MOSFET acha-se também no nível baixo (-12 V),
mantendo o semicondutor no estado de não condução. Por outro lado, se na saída do
microcontrolador for apresentado um sinal no nível lógico alto (+5 V) é aplicado ao
conversor flyback um sinal no nível lógico alto (+12 V), procedendo à magnetização do
núcleo do transformador a partir da passagem de corrente possibilitada pelo estado de
condução do MOSFET. A Figura 6.9 apresenta o sinal de PWM à saída do
microcontrolador e na gate do semicondutor do conversor.
Saída do
Microcontrolador
Saída do Drive
do Mosfet
Figura 6.9 – Sinal de PWM na saída do microcontrolador e aplicado ao MOSFET
6.3 Resultados da Alimentação do Circuito de Comando
Como referido anteriormente, a tensão do circuito de comando deverá ser obtida a
partir do enrolamento do induzido, obtendo-se os valores de tensão necessários para o
inicio do processo (a partir da indução remanescente) e garantindo o funcionamento de
todo o sistema quando o alternador apresentar a tensão de geração pretendida. Para que
fosse possível o isolamento entre o circuito de potência e o circuito de comando, foi
necessária a obtenção de fontes independentes para o circuito de medida/alimentação do
microcontrolador e para o circuito de controlo. Posto isto, obtiveram-se os seguintes
resultados.
86
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
6.3.1 Circuito de Medida/Microcontrolador
Para o circuito de medida resultaram valores de tensão capazes de alimentar tanto o
sensor de tensão como o sensor de corrente ( 15 V), enquanto para a alimentação do
microcontrolador alcançou-se a tensão necessária (+5 V). Estes valores mantêm-se
constantes desde o inicio do processo até à tensão máxima de geração retirada de
metade do enrolamento do induzido. Na Figura 6.10 pode-se verificar que as tensões de
saída do circuito de alimentação mantêm-se constantes desde o valor da tensão obtida
através da indução remanescente até à tensão máxima admitida.
Ponto da tensão
obtida da indução
remanescente
Figura 6.10 – Tensão obtida para alimentação do circuito de medida/microcontrolador
6.3.2 Circuito de Controlo
Da mesma forma que para o circuito de medida/microcontrolador, para o circuito de
controlo obtiveram-se as tensões necessárias para possibilitar a comutação do MOSFET
do conversor flyback ( 12 V). Também aqui, estes valores devem manter-se constantes
em todo o processo de geração de energia. Como já referido, esta alimentação se obtém
a partir dos terminais do alternador. A Figura 6.11 mostra as tensões obtidas a para o
circuito de controlo.
Universidade do Minho
87
Resultados Experimentais do Regulador Implementado
Figura 6.11 – Tensão obtida para alimentação do circuito de controlo
Na figura anterior pode-se verificar que, a partir do momento que, aos terminais do
alternador se consegue obter um valor de tensão de cerca de 98 V (indução
remanescente), tem-se na saída da alimentação do circuito de controlo duas tensões
distintas ( 12 V) que se mantêm no mesmo valor desde esse ponto até ser obtida a
tensão máxima de geração (200 V).
6.4 Resultados do Algoritmo de Controlo
Neste item apresentar-se-á o resultado do controlador PI aplicado ao controlo da
corrente de saída do conversor flyback. Como não foi possível efectuar os testes com o
sistema completo, optou-se apenas por verificar o comportamento do controlador para a
corrente de excitação ao invés da tensão aos terminais do alternador. Desta forma,
definiu-se um valor de corrente de referência (400 mA) para o qual o sistema se deve
manter qualquer que seja a carga na saída. A Figura 6.12 apresenta o resultado do
sistema quando aplicado o controlador PI, para a colocação da corrente de saída no
valor de referência. Por outro lado pretende-se que o sistema mantenha a corrente de
saída dentro dos valores pretendidos mesmo com alterações da carga. A Figura 6.13
apresenta o resultado para variação da carga quer esta diminuía ou aumente, mostrando
o comportamento do sistema para estas alterações. Quando a carga ligada à saída do
conversor flyback aumenta, o valor do erro é positivo. O valor da razão cíclica aumenta
de maneira a aplicar à carga maior tensão, aumentando desta forma a corrente injectada
88
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
na carga. Da mesma forma, quando o valor da carga diminui o erro passa a ter valor
negativo diminuindo o valor da razão cíclica do PWM, fazendo com que a tensão
aplicada à carga diminui-a fazendo a corrente voltar ao valor de referência.
Corrente na Carga
Figura 6.12 – Resposta do sistema ao controlador PI (colocação da corrente no valor de referência)
(a)
(b)
Figura 6.13 - Resposta do sistema ao controlador PI a alterações da carga
(a)Carga aumenta (b) Carga diminui
6.5 Resultados da Interface Sistema-Utilizador
O interface entre o sistema e utilizador fez-se a partir das interrupções externas, para
inicio e fim do processo e alteração do valor da tensão pretendida aos terminais do
alternador. Para além das interrupções externas, usou-se um LCD para tornar o interface
mais fácil e perceptível. Neste item apresentar-se-ão os diferentes resultados para o
interface.
6.5.1 Inicialização e Finalização do Processo de Geração
Quando a energia remanescente surge nos terminais da máquina, o circuito de
comando inicia as suas funções. A medição dos valores da corrente de excitação e
Universidade do Minho
89
Resultados Experimentais do Regulador Implementado
tensão no enrolamento do induzido são mostradas no LCD. A Figura 6.14 mostra o
LCD antes do inicio do processo de geração de energia.
Figura 6.14 – Valor da tensão retirada dos terminais do alternador antes do inicio do processo
Como se pode verificar, o LCD mostra apenas a tensão obtida aos terminais do
alternador, obtida a partir da energia remanescente do entreferro. Neste momento ainda
não se iniciou o processo de pré-excitação para posterior controlo da tensão de saída. É
a partir da interrupção externa que se envia para o microcontrolador o sinal para o inicio
do processo. Quando a interrupção externa0 (EXT0) é chamada dá-se o inicio do
processo, fazendo-se a pré-excitação e dando inicio ao controlador PI, para que, no final
da pré-excitação o sistema se mantenha nos valores pretendidos. A Figura 6.15 mostra a
mensagem no LCD quando se inicia a regulação da corrente de excitação.
Figura 6.15 – Mensagem de inicio do processo
Da mesma forma, para suspender a corrente de excitação do alternador, recorre-se à
interrupção externa 2 (EXT2), desta forma o sistema termina o processo de regulação de
tensão mostrando a mensagem da Figura 6.16.
90
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Figura 6.16 – Mensagem de fim de processo
6.5.2 Alteração do Valor de Referência
Durante o processo de geração de energia é possível a alteração do valor de
referência para o controlo da tensão de saída. A alteração deste valor fez-se a partir das
interrupções do microcontrolador. A interrupção externa 1 (EXT1) inicia a alteração do
valor, sendo este decrementado ou incrementado, dentro do limite pré-estabelecido
(360-400 V), a partir das interrupções EXT0 e EXT2, respectivamente. A Figura 6.17
mostra a mensagem para o inicio da alteração do valor de referência, enquanto a Figura
6.18 mostra a mensagem que indica a alteração do valor de referência. A partir daqui o
processo de regulação continua normalmente, agora para o novo valor de tensão.
Figura 6.17 – Mensagem de inicio de alteração do valor de referência
Universidade do Minho
91
Resultados Experimentais do Regulador Implementado
Figura 6.18 – Mensagem de fim de alteração do valor de referência
6.6 Mensagem de Erro do Sistema
Sempre que existir excesso de tensão nos terminais do alternador, assim como a
corrente de excitação for superior aos valores admitidos, o processo deve ser parado e
enviado para o LCD uma mensagem de erro. Esta mensagem alerta o utilizador o tipo
do problema existente. Quando existir um excesso de tensão nos terminais do
alternador, depois de parado o processo é envidada para o LCD a mensagem da Figura
6.19 (a). Se surgir uma sobreexcitação do alternador é enviada a mensagem da Figura
6.19 (b).
(a)
(b)
Figura 6.19 – Aviso de erro do sistema:
(a) Sobreexcitação (b) Excesso de tensão nos terminais do alternador
92
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Capítulo 7
Conclusões e Sugestões de Trabalho Futuro
7.1 Conclusões
O principal objectivo deste trabalho consistia na implementação de um regulador
capaz de colocar na saída de um alternador trifásico uma tensão alternada constante em
amplitude, independentemente da quantidade de cargas alimentadas. Todo o sistema
implementado deveria funcionar autonomamente sem auxílio de qualquer fonte externa
aproveitando a de indução remanescente do alternador, sendo conseguidas tanto a
corrente de excitação, como todas as alimentações necessárias ao funcionamento a partir
dos enrolamentos do induzido.
Numa fase inicial, fez-se um estudo sobre a máquina síncrona. Este estudo
proporcionou um conhecimento mais aprofundado acerca da construção, funcionamento
e características da máquina síncrona, e como a sua utilização na geração de energia é
patente na grande parte das centrais que convertem energia mecânica em energia
eléctrica. Para além do estudo sobre a máquina síncrona, pesquisou-se acerca das
formas de excitação da mesma. Desta pesquisa resultaram quais os sistemas existentes,
qual o funcionamento de cada, e de que forma devem ser usados consoante as suas
vantagens e desvantagens. Daqui concluiu-se que, para a maioria das novas instalações,
a excitação estática é a mais utilizada, qualquer que seja a construção da máquina
síncrona e o sistema de geração onde será aplicado. Esta escolha resulta da facilidade de
implementação mas mais importante ainda, das suas vantagens a nível económico,
quando comparada com os outros sistemas de excitação.
De maneira a perceber como é constituído o sistema de excitação escolhido para
implementação, foi feito um estudo sobre a constituição do sistema de excitação
estático. A partir daqui, percebeu-se quais os elementos que o constituem assim como a
forma de controlo mais adequada para o sistema em questão. Sendo o controlador PID o
mais usado em sistemas de excitação, tornou-se necessário o seu estudo, onde se
verificou qual a contribuição de cada acção deste, para o correcto funcionamento da
regulação da tensão de saída do alternador. Para além disso, foi feito um pequeno estado
da arte, onde se pôde conhecer alguns equipamentos destinados à excitação e regulação
do alternador.
Para a implementação do regulador, a pesquisa acerca da forma como converter a
tensão alternada, obtida dos terminais do alternador, em tensão e corrente contínua
Universidade do Minho
93
Conclusões e Sugestões de Trabalho Futuro
necessária para a excitação, foi um passo importante. O estudo acerca dos conversores
de potência possibilitou um maior conhecimento das diferentes topologias e controlo
dos conversores, tanto dos CA/CC como dos CC/CC. Para o estudo dos conversores
CA/CC, aliás o conversor padrão na maioria dos sistemas de excitação, percebeu-se o
seu funcionamento, principalmente o rectificador totalmente controlado, como forma de
aplicar corrente contínua no enrolamento do indutor criador do campo de excitação do
alternador. O conversor CA/CC torna-se assim uma excelente escolha, isto porque,
permite alterar o valor médio da tensão de saída desde zero até ao valor máximo da
tensão a rectificar. Quanto aos conversores CC/CC, fez-se um estudo das diferentes
topologias dos conversores, onde se verificou que existem conversores que possibilitam
o isolamento galvânico entre a entrada e a saída. Desta forma, estes conversores
tornam-se também uma boa escolha na implementação do regulador de tensão. Para
além de possibilitar o ajuste da corrente de excitação, proporciona ao sistema maior
protecção, uma vez que, em caso de avaria do semicondutor presente na constituição do
conversor, não surge excesso de corrente no enrolamento do indutor, nem a consequente
sobretensão no induzido, capaz de danificar os equipamentos ligados.
O sistema de excitação implementado permite, com o respectivo controlador, regular
a tensão de saída gerada para qualquer valor de carga. A pré-excitação deste é também
assegurada, tanto a nível de hardware como de software, tornando o sistema apenas
dependente da energia vinda dos terminais do alternador. Para o inicio do processo de
geração de energia, a tensão necessária para colocar o alternador nos valores nominais
em vazio consegue-se a partir da indução remanescente do entreferro do alternador.
Quanto a nível de comando do sistema, este pode-se dividir em duas unidades distintas,
a unidade de medida e a unidade de controlo. O interface entre as duas unidades é feito
a partir do microcontrolador. A partir da unidade de medida são obtidos os valores
instantâneos da corrente de excitação e da tensão no enrolamento do induzido. É a partir
destas leituras que o microcontrolador actua sobre a unidade de controlo, de maneira a
alterar, se necessário, o valor da corrente de excitação. Para a comutação do
semicondutor (circuito de controlo) utilizou-se o módulo PWM existente no
microcontrolador. O envio do sinal de PWM fez-se a partir de um drive especialmente
dedicado para o controlo de MOSFET, proporcionando ainda o isolamento entre o
circuito de comando e o circuito de potência. Em relação ao controlo da tensão de saída
do alternador em malha fechada, este fez-se com o controlador PI. A utilização de
apenas estas duas acções, ao invés do controlador PID, fez-se pelo facto de apresentar
uma fácil implementação e uma boa resposta a alterações da carga a alimentar.
94
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Apesar de não ter sido possível obter os resultados com todo o sistema em
funcionamento, foram efectuados testes para cada bloco constituinte do sistema de
excitação implementado. Os resultados obtidos em cada um deles foram os esperados,
conseguindo-se obter à saída do conversor uma variação de tensão capaz de ser aplicada
ao enrolamento do indutor para criação do campo do alternador. Também para o
circuito de comando foram alcançados os objectivos propostos, conseguindo-se obter os
valores da tensão e corrente correctamente e aplicando ao semicondutor do conversor
flyback os sinais necessários para o seu correcto funcionamento. Para o controlo e
regulação da tensão de saída do alternador, apesar de não ter sido testado nesse sentido,
o controlador PI mostrou-se eficaz no controlo da corrente de saída do conversor,
conseguindo obter-se uma resposta de acordo com o esperado. O interface entre o
utilizador assim como o sistema de protecção e aviso de mau funcionamento do sistema
apresentam um funcionamento eficaz.
Fazendo uma apreciação global de todo o trabalho realizado, pode concluir-se que
foram atingidos todos os objectivos, uma vez que, por falta de disponibilidade dos
serviços técnicos da Universidade do Minho para o teste de todo o sistema em
funcionamento, não foi possível apenas concluir este objectivo. Apesar de tudo, depois
de efectuados testes a todo o sistema implementado, verificou-se que a ligação deste ao
alternador seria possível e apresentaria uma boa resposta de acordo com os resultados
obtidos.
7.2 Propostas de Trabalho Futuro
O trabalho realizado, apesar de ter sido implementado com um TE e um rectificador
monofásico, tornava-se mais vantajoso uso de alimentação trifásica por vários motivos.
A obtenção da tensão aos terminais do alternador a partir das três fases faria com que,
não existissem desequilíbrios e apresentasse menor ripple na tensão de saída, apesar de
o regulador apresentar uma baixa potência de funcionamento. Para além disso, a
utilização de um transformador trifásico com ligação estrela triangulo (triangulo do lado
secundário), em detrimento do monofásico confinaria os harmónicos de terceira ordem
ao secundário do transformador, não havendo propagação para os terminais do
alternador. Para além da substituição de uma alimentação trifásica, poderá se extinguir o
TE.
A utilização de um núcleo de ferrite para o transformador do conversor flyback de
maiores dimensões permite que haja mais espiras, o que possibilitará a obtenção da
tensão para o rectificador directamente dos terminais do alternador. Contudo esta
solução poderá não ser aconselhável, pois com a ligação directamente do rectificador ao
Universidade do Minho
95
Conclusões e Sugestões de Trabalho Futuro
alternador vai existir propagação de harmónicos de terceira ordem, o que não acontecia
com o transformador ligado da forma recomendada.
Outro aspecto que poderá ser melhorado é o controlo do sistema. A integração da
acção derivativa no controlo proporcionará uma resposta mais rápida e eficaz do sistema
para variações rápidas da tensão de geração.
Por último, sugere-se o desenvolvimento de um sistema de comunicação entre o
sistema e o computador através da comunicação porta série (RS32). O microcontrolador
utilizado apresenta um módulo destinado para tal, sendo a implementação da
comunicação bastante simples e rápida. Depois de conseguida a comunicação, sugere-se
o desenvolvimento de um programa em LabView para monitorização dos valores do
sistema (tensão gerada, corrente fornecida, corrente de excitação, potências e taxa de
distorção harmónica), ou seja, desenvolver um sistema de monitorização de qualidade
da energia gerada. Para além da monitorização, todos os sinais de inicio e fim de
geração, e alteração dos parâmetros do controlador, poderão ser feitos a partir de um
computador pessoal. Para além disso poderá ainda ser desenvolvido um sistema de
comunicação em rádio frequência para o controlo e monitorização do sistema à
distância.
96
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
Referências Bibliográficas
[1]
“Geradores Para Grupos Geradores - Geração, Transmissão e Distribuição De
Energia,”
Disponível
Online
em
13
Janeiro
2010
em
http://www.weg.net/br/Produtos-e-Servicos/Energia/Geracao-Transmissao-eDistribuicao-de-Energia/Geradores-para-Grupos-Geradores.
[2]
V.D. Toro, "Basic Electric Machines", Prentice-Hall, 1990.
[3]
G. Marques, "Máquinas Síncronas", Foxit Reader, 2001.
[4]
Professor Alexandre Ribeiro, "Introdução às Máquinas Girantes", São Paulo:
2005.
[5]
“Fujian Yinjia Electromechanical Co., Ltd.,” Disponível Online em 13 Janeiro
2010 em http://www.bombascenters.es/15a-Stator.html.
[6]
J.L. Afonso, "Máquinas Síncronas", Apontamentos da UC de Máquinas
Eléctricas,Universidade do Minho, 2007.
[7]
T. Moreira, “Estudo e Enquadramento do Sistema de Excitação do Alternador no
Aproveitamento Hidroeléctrico de Caniçada,” Tese de Mestrado Integrado em
Engenharia Electrónica Industrial e Computadores,Universidade do Minho,
2010.
[8]
S.J. Chapmann, "Electric Machinery Fundamentals", McGraw-Hill, 1991.
[9]
J. Natureza, “Máquina Síncrona, Segunda Parte,” Apontamentos das Aulas de
Máquinas Electricasda Faculdade de Engenharia da FAAP, 2010.
[10] A. Costa and S. Simões, "Sistemas de Excitação de Geradores Síncronos",
Florianópolis: 2000.
[11] Comité Nacional Brasileiro de Produção e Transmissão de Energia Eléctrica,
"Guia para Especificação de Sistemas de Excitação", FT: 1998.
[12] Tan Kok Heng, “Design an Automatic Voltage Regulator for Laboratory
Synchronous Machine,” 2002.
[13] B. Copeland, “The Design of PID Controllers using Ziegler Nichols Tuning,”
Response, 2008.
[14] E. Electrotécnica, “Métodos de Sintonização de Controladores PID Método de
Sintonização de Ziegler-Nichols de Malha Fechada,” Intituto Politécnico de
Tomar, 2005.
[15] U. Unitrol, “Unitrol ® 1000,” 2000.
[16] Siemens, "Boletim informativo sobre sistemas de excitação e regulação de
tensão", São Paulo: 2007.
Universidade do Minho
97
Referências Bibliográficas
[17] D.W.Hart, "Introdution to Power Electronics", Prentice-Hal, 1997.
[18] N. Mohan, T.M. Underland, and W. Robbins, "Power Electronics Converters,
Applications, and Design", New York: John Wiley & Sons, Inc, 1995.
[19] "TS4B01G THRU TS4B07G", datasheet.
[20] “Application Note AN4137 Design Guidelines for Off-line Flyback Converters,”
2003.
[21] "IRFPE40", datasheet.
[22] "Voltage Transducer LV 25-P", datasheet.
[23] "Current Transducer LA 55-P", datasheet.
[24] J.G. Rocha, "MOSFETS e Amplificadores Operacionais", Porto: Netmove
Comunicação Global, Lda, 2005.
[25] "HCPL-3120", Technical Data.
[26] "PIC 18F4331", datasheet, 2007.
[27] "LM2592HV SIMPLE SWITCHER Power Converter 150 kHz 2A Step-Down
Voltage Regulator", datasheet.
[28] "MAX743CPE", datasheet.
98
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
ANEXOS
ANEXO A - Circuito de Potência ................................................................................ A-3
ANEXO B - Circuito da Unidade de Medida ............................................................... A-5
ANEXO C - Circuito da Unidade de Controlo ............................................................. A-7
ANEXO D - Circuito do Microcontrolador .................................................................. A-9
ANEXO E - Circuitos de Alimentação da Unidade de Comando .............................. A-11
ANEXO F - Código Implementado ............................................................................ A-13
Universidade do Minho
A-1
Regulador da Corrente de Excitação de um Alternador
ANEXO A
Circuito de Potência
Foi construído o circuito de potência responsável por fornecer ao enrolamento do
indutor a corrente de excitação necessária à criação do campo magnético do alternador.
O circuito em causa divide-se em três elementos distintos, o transformador de excitação,
o rectificador monofásico de onda completa com filtro capacitivo e o conversor flyback.
O esquema eléctrico adoptado encontra-se na Figura A1.
1:1
TS4B05G
TE
2,2 nF
4700 uF
63V
2 mH
4700 uF
63V
Induzido
10 K
F1
3A
100uH
UF5404
330 nF
100V
Indutor
2,2 mH
UF5408
T1
20k
1 : 6,4
PWM
IRFPE40
Figura A1 – Esquema eléctrico do circuito de potência
O circuito de potência pode fornecer ao enrolamento do indutor até 51 V / 700 mA.
Como a potência máxima admitida pela excitatriz é de 35 W, estes valores representam
os valores máximos admitidos para proceder à excitação do alternador.
Universidade do Minho
A-3
Regulador da Corrente de Excitação de um Alternador
ANEXO B
Circuito da Unidade de Medida
Foi construído um circuito capaz de receber os sinais dos sensores de corrente e
tensão efeito Hall e envia-los para o microcontrolador. No caso do sensor de corrente o
sinal medido é enviado directamente para o CAD para posterior interpretação, enquanto
o sinal do sensor de tensão terá que ser ajustado, a partir do circuito somador, de
maneira a ser admitido pelo microcontrolador. A Figura B1 apresenta o circuito
implementado para o sensor de tensão utilizado.
+15 V
420k
22 nF
420 V
(máx)
+
+HT
v_medido
LV 25-P
-HT
M
-
200
22 nF
-15 V
Figura B1 – Esquema eléctrico do circuito do sensor de tensão efeito Hall
Como referido, no caso do sensor de tensão, é necessário o uso de um circuito
somador de maneira que o sinal medido da tensão gerada possa ser recebido pelo
microcontrolador. A Figura B2 mostra o circuito somador implementado.
10 K
-15 V
+15 V
62 K
+
CAD
v_medido
10K
-15 V
Figura B2 – Esquema eléctrico do circuito somador
Universidade do Minho
A-5
Anexos
Para o sensor de corrente efeito Hall foi implementado o circuito da Figura B3. A
corrente máxima de leitura corresponde à corrente máxima fornecida pelo circuito de
potência (700 mA).
+15 V
I MAX 700mA
100 nF
N=50 Voltas
22 uF
+
CAD
LA 55-P
M
100 nF
100
22 uF
-15 V
Figura B3 – Esquema eléctrico do circuito do sensor de corrente efeito Hall
A-6
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
ANEXO C
Circuito da Unidade de Controlo
Para o correcto funcionamento do semicondutor usado no conversor flyback,
utilizou-se um drive capaz de aplicar à gate do MOSFET as tensões necessárias para a
sua comutação. Para além disso, proporciona o isolamento galvânico entre o circuito de
comando e o circuito de potência. A Figura C1 mostra o esquema eléctrico do circuito
da unidade de controlo.
+5 V
270
+5 V
+12 V
2
3
4
8
HCPL-3120
1
PWM
10
MOSFET
7
100 nF
6
5
-12 V
Figura C1 – Esquema eléctrico do circuito de controlo
A alimentação do lado primário do drive é a mesma que do circuito do
microcontrolador, enquanto a alimentação do secundário é obtida de outra fonte
independente, mas referenciada ao circuito de potência de forma a ser possível a
comutação do semicondutor do conversor flyback.
Universidade do Minho
A-7
Regulador da Corrente de Excitação de um Alternador
ANEXO D
Circuito do Microcontrolador
O circuito do microcontrolador recebe os sinais provenientes do circuito de medida e
de acordo com esses valores, interage com o circuito de controlo de maneira a ser
possível a correcta e eficaz excitação do alternador. Para além da função de controlo
permite a interface com o utilizador tanto a nível de alteração de parâmetros como
monitorização dos valores da tensão gerada e da corrente de excitação. O esquema
eléctrico utilizado para o circuito do microcontrolador encontra-se na Figura D1.
MCRL
10 K
PGD
Valor da Tensão
Valor da Corrente
5V
18pF
18pF 20 MHz
INT0
LCD_enable
LCD_rs
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
PIC 18F4331
Reset Manual
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
PGC
PGC
PWM
5V
1K
LCD_B7
LCD_B6
LCD_B5
LCD_B4
INT2
INT1
LCD_rw
Figura D1 – Esquema eléctrico do circuito do microcontrolador
Universidade do Minho
A-9
Regulador da Corrente de Excitação de um Alternador
ANEXO E
Circuitos de Alimentação da Unidade de
Comando
A alimentação dos diferentes circuitos da unidade de comando é obtida a partir dos
terminais do alternador. O circuito de alimentação deve manter as tensões necessárias
para o correcto funcionamento desde o inicio do processo (tensão obtida da indução
remanescente) até que o alternador produza a tensão nominal de funcionamento.
As alimentações necessárias para os diferentes circuitos que constituem a unidade de
medida são:
Unidade de Medida
15 V
Unidade de Controlo
12 V
Circuito do Microcontrolador +5 V
Para a alimentação da unidade de medida/circuito do microcontrolador
implementou-se o circuito representado na Figura E1.
BU1006
Vout = 5V
Vin_min=90V
Vin_max=200V
330 uF
Feedback
Output
Vin
GND
On/Off
LM2592HV-5.0
68 uF
EGP20A
+5V
330 uF
100uH
15,3:1
0.01uF
16
2
15
3
14
4
5
10uF
1uF
6
7
8
MAX 743 CPE
0.1uF
1
+15 V
IN5817
100uF
13
12
100uF
-15 V
11
10
9
IN5817
0.01uF
100uF
100uH
Figura E1 – Esquema eléctrico do circuito de alimentação unidade de medida/microcontrolador
A tensão necessária para a alimentação do microcontrolador é retirada da saída do
regulador LM2592HV, enquanto para os sensores a tensão necessária obtém-se da saída
do MAX743CPE.
Para a alimentação do circuito de comando seguiu-se a mesma implementação do
circuito anterior com a diferença que para o circuito de comando, são necessários níveis
Universidade do Minho
A-11
Anexos
de tensão de
12 V. A Figura E2 mostra o circuito implementado para a alimentação da
unidade de controlo.
BU1006
Vin_min=90V
Vin_max=200V
330 uF
Feedback
Output
Vin
GND
On/Off
LM2592HV-5.0
68 uF
EGP20A
+5V
330 uF
100uH
15,3:1
0.01uF
16
2
15
3
14
4
5
10uF
1uF
6
7
8
MAX 743 CPE
0.1uF
1
+15 V
IN5817
100uF
13
12
100uF
-15 V
11
10
IN5817
9
0.01uF
100uF
100uH
Figura E2 – Esquema eléctrico do circuito de alimentação da unidade de controlo
A-12
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
ANEXO F
Código Implementado
O código foi desenvolvido em linguagem C de forma a proceder ao controlo da
corrente de excitação do alternador. A partir dos valores recebidos da unidade de
medida são determinadas as acções proporcional e integral para o controlador. A partir
dos resultados obtidos pelo controlador é enviado para o conversor flyback o sinal de
PWM necessário para o ajuste da corrente de excitação para o valor de referência.
//********************José Miguel Leite da Silva****************************************************
//**********************Controlo Automático da Tensão de Saída de um Alternador*********************
//
Utiliza 3 entradas analogicas que vao corresponder a 1 tensão e 1 corrente, outra ainda que corresponde à definição do
valor de referência
//
//
A placa a ser utilizada pode ter ganho na entrada ADC..........(verificar)
//
A saída utilizada será o power PWM1 pino 34
//
//
//
// ADC-->1024=200V
// ADC-->1024=0.74A
//
//
// A definição dos pinos utilizados para o lcd são os seguintes
//
pino
//
D0 enable
19
//
D1 rs
20
//
D2 rw
21
//
D4 D4
27
//
D5 D5
28
//
D6 D6
29
//
D7 D7
30
//
//
//200V ==> 1023 ==> 5V
//0.74A ==> 1023 ==> 5V
//PWM1 ira corresponder ao mosfet que força a corrente de excitação
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#include <18f4331.h>
#device ADC=10
#use delay(clock=20000000)
#fuses HS,NOWDT,PUT,NOLVP
#include <stdio.h>
#include <math.h>
Universidade do Minho
A-13
Anexos
#include <lcdd.c>
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
///////////////Definir Pinos do LCD//////////////////////////////////////////////
#define B4
PIN_D4
#define B5
PIN_D5
#define B6
PIN_D6
#define B7
PIN_D7
#define enable
PIN_D0
#define rw
PIN_D2
#define rs
PIN_D1
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
//Definição do modo do ADC
#byte ADCON1 = 0xFC1
#byte ADRESL = 0xFC3
#byte ADRESH = 0xFC4
#byte ADCHS = 0xF99
#bit ADC_FIFOEN = ADCON1.4
#bit ADC_BFEMT = ADCON1.3
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//////////////DECLARAÇÃO DE VARIAVEIS/////////////////////////////////////////////////////////////////////////////////////
signed long int duty=0, i=0, pi_i, integral_i, erroIexc;
long Iexc, Vin, result0, result1, aux=0, conta=0, Iref=400;
int ON=0, aux1=0;
float corrente, tensao, media_V, media_I, soma_I=0, soma_V=0;
int32 vector_I[]={0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
int32 vector_V[]={0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
//-----------------------------------------------------------------------------------------------------------------------//------------------------------------------------------------------------------------------------------------------------
#INT_AD
void trata_ADC()
//Rotina de Serviço à interrupção AD
{
aux++;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//+++++++++++++++++++++++++Inicia Leitura Do conversor
AD++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// Wait for the first A/D result to become available in the fifo.
// Then read it.
while(ADC_BFEMT);
result0 = make16(ADRESH, ADRESL);
// Wait for the 2nd A/D result to become available in the fifo.
// Then read it.
while(ADC_BFEMT);
result1 = make16(ADRESH, ADRESL);
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/////Média Deslizante Tensão e Corrente//////////////////////////
A-14
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
//tensao
soma_V=soma_V+result0-vector_V[i];
//soma dos valores do vector
media_V=soma_V/51;
//media dos valores medidos
vector_V[i]=result0;
//Actualiza o Vector
tensao=((media_V*199.6)/637);
//Determinda o Valor da tensão instantanea
Vin=ceil(tensao);
//Valor da Tensão a Usar
//Corrente
soma_I=soma_I+result1-vector_I[i];
media_I=(soma_I/51);
vector_I[i]=result1;
corrente=((media_I*0.71)/(973));
//valor da corrente instantânea
Iexc=ceil(corrente*1000);
//valor da corrente para usar*/
i=i+1;
//quando vector preenchido aponta para a posição 0
if(i>50)
i=0;
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//+++++++++++++++++Inicia o tratamento dos valores medidos nos sensores+++++++++++++++
if(aux==1000)
{
aux=0;
if(Iexc<=0)
//Se por algum motivo o valor da corrente der negativo define-se como sendo 0
Iexc=0;
if(Iexc>700)
//Se o valor da corrente de excitação for superio a 700 ma o sitema é desligado
{
setup_timer_1 (T1_DISABLED);
set_power_pwm0_duty(0);
//Desativa Controlo PID
//Termina conversão de
Energia do Flyback
duty=0;
//Coloca o Valor do Duty em 0
disable_interrupts ( INT_EXT | INT_EXT1 | INT_EXT2 | INT_TIMER1);
//Desabilita todas as Interrupções
lcd_clean();
lcd_gotoxy(1,1);
printf(lcd_putc,"**Erro - Excitacao**");
lcd_gotoxy(5,3);
printf(lcd_putc,"Prima Off");
do{}while(input(PIN_C5));
reset_cpu();
}
if(Vin>220)
//Se o valor da tensão for superio a 220 V o sitema é desligado
{
setup_timer_1 (T1_DISABLED);
set_power_pwm0_duty(0);
//Desativa Controlo PID
//Termina conversão de
Energia do Flyback
duty=0;
//Coloca o Valor do Duty em 0
disable_interrupts ( INT_EXT | INT_EXT1 | INT_EXT2 | INT_TIMER1);
//Desabilita todas as Interrupções
lcd_clean();
lcd_gotoxy(1,1);
printf(lcd_putc,"****Erro - Tensao***");
lcd_gotoxy(5,3);
printf(lcd_putc,"Prima Off");
do{}while(input(PIN_C5));
Universidade do Minho
A-15
Anexos
reset_cpu();
}
//Escreve os Valores da Tensão do Gerador e Corrente de Excitação no LCD
lcd_clean();
lcd_gotoxy(1,1);
printf(lcd_putc,"----Modo Leitura----");
lcd_gotoxy(3,3);
printf(lcd_putc,"V_Gerador = %ld V", Vin);
lcd_gotoxy(3,4);
printf(lcd_putc,"Iexc = %ld mA",Iexc);
}
read_adc(ADC_START_ONLY);
// Set the GO bit in ADCON0
}
//---------------------------------------------------------------------------------------------------------------------------//----------------------------------------------------------------------------------------------------------------------------
#INT_EXT
void trata_ext0()
{
delay_ms(500);
if(aux1==0&&ON==0)
{
integral_i=0;
//coloca o valor do erro integral em zero
ON=1;
////////////////////////////////////////////////////////////////////////////////
//+++++++++++++++++++++++++++++++Inicia Timer 1++++++++++++++++++++++++
setup_timer_1(T1_INTERNAL | T1_DIV_BY_1);
set_timer1(65536-50000);
lcd_clean();
lcd_gotoxy(5,2);
printf(lcd_putc"P.I.D. ON");
delay_ms(1000);
}
if(aux1==1)
{
Iref=Iref-1;
if(Iref<=180)
Iref=180;
lcd_gotoxy(2,1);
printf(lcd_putc,"Alterar Referencia");
lcd_gotoxy(5,3);
printf(lcd_putc,"V_Saida = %ld",Iref);
}
}
//------------------------------------------------------------------------------//-------------------------------------------------------------------------------
#INT_EXT1
//Rotina de Serviço à interrupção Externa 2
void trata_ext2()
A-16
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
{
delay_ms(500);
if(aux1==0)
{
aux1=1;
lcd_clean();
disable_interrupts ( INT_AD | INT_TIMER1);
//Desabilita Interrupções Conversor AD e Timer1
lcd_gotoxy(2,1);
printf(lcd_putc,"Alterar Tensao");
lcd_gotoxy(5,3);
printf(lcd_putc,"V_saida = %ld",Iref);
}
else
{
aux1=0;
integral_i=0;
//reinicializa erro integral
lcd_clean();
lcd_gotoxy(2,1);
printf(lcd_putc,"Referencia Alterada");
lcd_gotoxy(2,3);
printf(lcd_putc,"Novo Valor = %ld",Iref);
delay_ms(1500);
enable_interrupts ( INT_AD | INT_TIMER1);
//Reabilita todas as Interrupções
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
///Definir Externas como transição alto para baixo///////////////////////////////////////
ext_int_edge ( 0, H_TO_L);
ext_int_edge ( 1, H_TO_L);
ext_int_edge ( 2, H_TO_L);
}
}
//------------------------------------------------------------------------------//-------------------------------------------------------------------------------
#INT_EXT2
//Rotina de Serviço à interrupção Externa 1
void trata_ext1()
{
delay_ms(500);
if(aux1==0)
{
setup_timer_1 (T1_DISABLED);
set_power_pwm0_duty(0);
//Desativa Controlo PID
//Termina conversão de Energia do Flyback
duty=0;
//Coloca o Valor do Duty em 0
lcd_clean();
//Comunica com o utilizador o termino da conversão
lcd_gotoxy(5,2);
printf(lcd_putc,"P.I.D. OFF");
ON=0;
delay_ms(1000);
}
Universidade do Minho
A-17
Anexos
if(aux1==1)
{
Iref=Iref+1;
if(Iref>200)
Iref=200;
lcd_gotoxy(2,1);
printf(lcd_putc,"Alterar Referencia");
lcd_gotoxy(5,3);
printf(lcd_putc,"V_saida = %ld",Iref);
}
}
//------------------------------------------------------------------------------//-------------------------------------------------------------------------------
#INT_TIMER1
void trata_timer1()
{
//reinicia a contagem do timer 1 em 50000 mais a contagem que já passou desde a entrada na ISR
set_timer1((65536-50000)+get_timer1());
conta++;
if(conta==50)
//1 segundo conta==100
{
conta=0;
/////////////////////////////////////////////////////////////////////////////////
//+++++++++++++++Determinar Parametros Do Controlador PI+++++++++++++++++++++++++
//erro da corrente de Excitação
erroIexc=Iref-Iexc;
//limite erro de excitação
if( erroIexc>=-3 && erroIexc<=3)
erroIexc=0;
//integral do erro
integral_i = integral_i + erroIexc;
//limite do integral
if(integral_i>60) integral_i=60;
if(integral_i<-60) integral_i=-60;
//proporcional integral
pi_i= (0.1*erroIexc) + (0.5*integral_i);
//limite do proporcional integral
if(pi_i>5)
{pi_i=5;}
if(pi_i<-5)
{pi_i=-5;}
//Determinar valor do duty cicle
duty=duty+pi_i;
//Defenir os valor máximo admissivel para duty cicle duty=214
if(duty<=0){duty=0;}
A-18
Departamento de Electrónica Industrial
Regulador da Corrente de Excitação de um Alternador
if(duty>=210){duty=210;}
//definir valor POWER PWM
set_power_pwm0_duty(duty);
}
}
//------------------------------------------------------------------------------//-------------------------------------------------------------------------------
void main(void)
{
lcd_init();
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/////////////Definição do PWM e frequencia////////////////////////////////////
// Setup_power_pwm_pins(PWM_ODD_ON,PWM_ODD_ON,PWM_ODD_ON,PWM_ODD_ON);
setup_power_pwm_pins( PWM_ODD_ON, PWM_OFF,PWM_OFF,PWM_OFF);
//
PPWM channels 0 and 1 are both on and always opposite values
setup_power_pwm( PWM_CLOCK_DIV_4|PWM_FREE_RUN,1,0,100,0,1,0);
//Freq:50Khz
//Coloca PWM em 0
set_power_pwm0_duty(duty);
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////Definir Interrupões Necessárias/////////////////////////////////////////
enable_interrupts (GLOBAL);
enable_interrupts (INT_EXT);
//Global
//Externa 0
enable_interrupts (INT_EXT1);
//Externa 1
enable_interrupts (INT_EXT2);
//Externa 2
enable_interrupts (INT_AD);
//Conversor Analógico Digital
enable_interrupts (INT_TIMER1); //Timer 1
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////
///Definir Como transição alto para baixo///////////////////////////////////////
ext_int_edge ( 0, H_TO_L);
ext_int_edge ( 1, H_TO_L);
ext_int_edge ( 2, H_TO_L);
////////////////////////////////////////////////////////////////////////////////
//+++++++++++++++++++++++++++++++Inicia ADC++++++++++++++++++++++++
// Select pins AN0 and AN1, in Groups A and B, respectively.
setup_adc_ports(sAN0 | SAN1);
// Tell ADC to read continuously from input Groups A and B.
setup_adc(ADC_CLOCK_INTERNAL | ADC_CONT_AB);
delay_us(10);
// Tell the ADC to put the conversion results in the fifo.
ADC_FIFOEN = 1;
read_adc(ADC_START_ONLY); // Set the GO bit in ADCON0
//******************************************************************************
Universidade do Minho
A-19
Anexos
while(1);
//Aguarda ocorencia de interrupções
}
A-20
Departamento de Electrónica Industrial
Baixar