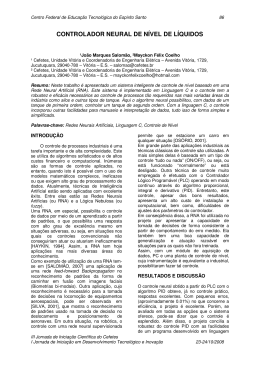
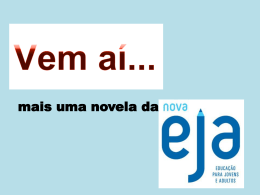
ESTIMAÇÃO DE PRESSÃO DIFERENCIAL EM BOMBAS CENTRÍFUGAS SUBMERSAS COM USO DE REDES NEURAIS ARTIFICIAIS WENDERSON L. GANDA1, HANS R. KULITZ2, JEAN C. D. DE ARAÚJO1, JOÃO M. SALOMÃO2, RODRIGO V. ANDREÃO2. 1. Unidade de Operações do Espírito Santo, Petrobras Av. Nossa Senhora da Penha, nº1.688, Barro Vermelho, Vitória-ES. CEP 29057-550. E-mails: [email protected] e [email protected] 2. Coordenadoria de Pós-Graduação em Engenharia Elétrica, Instituto Federal do Espírito Santo Av. Vitória, nº1729, Jucutuquara, Vitória-ES. CEP 29040-780. E-mail: [email protected], [email protected] e [email protected] Abstract This work develops an Intelligent System based on Artificial Neural Networks to solve the differential pressure estimation problem in electrical submersible pumps that are used in oil offshore production. Classical solution techniques for this problem, like using abacus or flow simulators presents errors that make it difficult to use these tools in simulation problems. In this context, this work aims anticipate the results of scientific development for determination of performance degradation of electrical submersible pumps through the application of neural network algorithm. Using large samples of field data with great representation, this work is a low computational cost alternative to determine the differential pressure in the presence of gas in viscous fluids. Keywords Artificial Neural Networks. Oil and Gas Multiphase Flow. Electrical Submersible Pumps. Resumo Este trabalho desenvolve um Sistema Inteligente baseado em Redes Neurais Artificiais (RNA) para solucionar o problema de estimação de pressão diferencial em bombas centrífugas submersas utilizadas na produção marítima de petróleo. Técnicas clássicas de solução deste problema, como o uso de ábacos e através de simuladores de escoamento apresentam erros que dificultam o uso destas ferramentas em problemas de simulação. Neste cenário, este trabalho busca antecipar o resultado do desenvolvimento científico para a determinação da degradação do desempenho em bombas centrífugas submersas através da aplicação de algoritmos de rede neural. Fazendo-se valer da abundância de dados de campo com grande representatividade, este trabalho representa uma alternativa de baixo custo computacional para a determinação do diferencial de pressão na presença de gás e fluidos viscosos. Palavras-chave Redes Neurais Artificiais, Escoamento Multifásico de Petróleo e Gás Natural. Bombeio Centrífugo Submerso. 1 Introdução As redes neurais são um sistema de processamento de informações distributivo, não digital e intensivamente paralelo. Baseado no sistema neural humano, uma rede neural artificial, ou simplesmente, rede neural é um sistema que adquire, armazena e usa o conhecimento experimental a fim de aprender um dado comportamento. Este conhecimento é apresentado para a rede na forma de dados e numa rede neural típica é dividido em conjuntos de treinamento e de teste. O conjunto de treinamento é usado para que a rede aprenda um dado comportamento e o conjunto de teste é utilizado para verificar se o treinamento da rede foi eficaz. As redes neurais podem ajudar os engenheiros e pesquisadores em alguns problemas fundamentais de engenharia onde a computação e modelagens convencionais tem sido incapazes de solucionar adequadamente, principalmente onde uma grande quantidade de dados históricos está disponível. A rede neural tem se mostrado uma grande ferramenta de reconhe- cimento de padrões complexos, além de determinação, predição e estimação de variáveis em diversos problemas e sistemas. Dentre as possíveis aplicações do uso de redes neurais na solução de problemas de engenharia de petróleo, este trabalho tem como objetivo apresentar o estudo sobre o desenvolvimento de um estimador de pressão diferencial em sistemas de bombeio centrífugo submerso submarino (BCSS) baseado em redes neurais, pois técnicas clássicas de solução deste problema têm se mostrado não confiáveis em relação aos erros de estimação obtidos. O método de elevação artificial por emprego de bombas centrífugas submersas submarinas em poços offshore tem recebido expressiva atenção, sobretudo, em poços produtores de óleos tipicamente viscosos e/ou dependentes de complementação de energia na forma de pressão. Neste sentido, o desenvolvimento de técnicas alternativas ao modelo homogêneo para a determinação do diferencial de pressão das bombas centrífugas tem sido objeto de estudo de diversos pesquisadores principalmente no final da primeira metade do século anterior. Dentre as dificuldades para a realização da tarefa de estimar a pressão diferencial ao longo do equipamento destacam-se as perdas por fricção, resultantes da dissipação de energia em razão da interação entre os fluidos viscosos e os componentes da bomba e as perdas devido às diferenças entre as velocidades entre as fases líquida e gasosa no escoamento bifásico, ambas interferindo de forma significativa no desempenho dos equipamentos. Em relação às perdas por viscosidade, desenvolvimentos iniciados por Stepanoff (1940 e 1957) e mais tarde continuados por outros autores foram publicados em formas de ábacos pelo Hydraulic Institute (1955) e constituem atualmente o algoritmo mais encontrado em simuladores comerciais de escoamento multifásico. Alvos de críticas na academia e na indústria, as cartas do Hydraulic Institute apresentam baixa aderência entre dados de campo e os calculados e motivaram o desenvolvimento de uma nova linha de pesquisa na última década, onde Solano (2008) propôs a caracterização da perda de desempenho em bombas centrífugas através de números adimensionais. Atualmente, estudos vêm sendo propostos de forma a continuar o trabalho de Solano através de realização de novos experimentos (Paternost, 2013) ou através de modelos tridimensionais do equipamento utilizando CFD (Computional Fluid Dynamics). Para a determinação da perda de desempenho por acúmulo de gás em impelidores e difusores, interpretações mecanicistas e empíricas de experimentos receberam atenção de pesquisadores como Lea e Bearden (1980), Turpin et al. (1986) e Estevam (2002). No entanto, apesar da extensão dos trabalhos, os resultados restringem-se a prever a validade do modelo homogêneo para diferentes frações de gás, ou ainda, prever o início dos fenômenos conhecidos como surging ou o bloqueio por gás propriamente dito. Estudos combinados buscando compreender a perda de desempenho tanto por efeitos viscosos quanto pela presença do gás têm sido alvo de pesquisas nos últimos anos, porém, sem aplicabilidade significativa para a indústria. Neste cenário, este trabalho busca antecipar o resultado do desenvolvimento científico para a determinação da degradação do desempenho em bombas centrífugas submersas através da aplicação de algoritmos de rede neural. Fazendose valer da abundância de dados de campo com grande representatividade, este trabalho apresenta uma alternativa de baixo custo computacional para a determinação do diferencial de pressão na presença de gás e fluidos viscosos. 2 Métodos 2.1 Redes Neurais Artificiais O uso de inteligência artificial na solução de problemas abrange diversas áreas de estudo, desde biologia e medicina até engenharia aeroespacial. A partir dos anos 1990, houve uma retomada no interesse de estudos envolvendo RNA e suas aplicações devido ao desenvolvimento de novos algoritmos de solução e atualmente, é consenso que existe um potencial imenso para o uso de RNA em vários problemas de engenharia aplicada. As principais características das RNA são: • • • • Adaptação por experiência: as adaptações dos parâmetros internos da rede, tipicamente seus pesos sinápticos, são ajustados de acordo com a apresentação sequencial de exemplos (dados de treinamento) relacionados ao comportamento do processo, tornando possível assim, a aquisição do conhecimento por experimentação; Habilidade de generalização: após etapa de treinamento da rede, essa é capaz de generalizar o conhecimento adquirido, possibilitando estimar soluções que são até então, desconhecidas pela rede; Organização de dados: capacidade de realizar sua organização interna visando à possibilidade de agrupamento de padrões que apresentam similaridades; Facilidade de prototipagem: a implementação da maioria dos modelos de RNA pode ser facilmente prototipada em hardware ou em software, pois após o treinamento, os seus resultados são normalmente obtidos por algumas operação matemáticas elementares. A representação básica de um neurônio artificial está descrita na Figura 1. Os sinais de entrada externos à rede são representados pelo conjunto ( x1 , x2 , x3 ,..., xn ) . As ponderações exercidas pelas junções sinápticas são representados pelo pesos sinápticos ( w1 , w2 , w3 ,..., wn ) . A relevância de cada entrada é executada pela multiplicação da entrada pelo peso. A saída do neurônio u será a soma das entradas ponderadas pelos pesos. Figura 1. Neurônio Artificial A variável θ é chamada de limiar de ativação ou bias e representa o patamar apropriado para que o resultado produzido pelo somador possa gerar um valor de disparo em direção à saída do neurônio. A saída do somador u é chamada de potencial de ativa- ção e é calculado pela equação 1. Se o valor de u é positivo, então o neurônio produz um potencial excitatório. Caso contrário, o potencial será inibitório. A função g(.) é chamada de função de ativação e seu objetivo é limitar a saída do neurônio dentro de um intervalo de valores. A saída y, dada pela equação 2, será então o valor final produzido pelo neurônio em relação a um determinado conjunto de sinais de entrada. volvimento deste algoritmo o início da grande popularidade das RNA PMC a partir de 1986, com publicação do livro Parallel Distributed Processing, por Rumelhart et al., conforme Silva et al. (2010). n u = ∑ wi .xi − θ (1) i =1 y = g (u ) (2) As principais funções de ativação mais utilizadas são as funções logística e tangente hiperbólica, descritas pelas equações 3 e 4, respectivamente: Figura 2. Topologia da Rede Perceptron Multicamadas g (u ) = 1 1 + e − βu (3) g (u ) = 1 − e − βu 1 + e − βu (4) Em que β representa a inclinação da função frente ao seu ponto de inflexão. Na etapa de treinamento, basicamente os valores dos pesos e limiar são incrementados ou decrementados, proporcionalmente aos valores da entrada, se a saída produzida coincide ou não com a saída desejada. Este processo é repetido para todas as amostras de treinamento até que a saída produzida pelo Perceptron seja similar à saída desejada para cada amostra. As regras de ajuste podem ser descritas pela equação 5. w ← w + η.(d ( k ) − y ).x ( k ) (5) Em que: [ x ( k ) = − 1 x1k x2k ] ... xnk é a k-ésima amos- tra de treinamento; d (k ) é o valor desejado para k-ésima amostra de treinamento; y é a saída produzida pela rede; η é uma constante que define a taxa de aprendizagem da rede. A rede do tipo Perceptron Multicamadas (PMC) é a forma mais usual de RNA utilizada para resolver uma imensa variedade de problemas. Possui como característica principal a presença de ao menos uma camada intermediária de neurônios situada entre a entrada e a saída. A topologia básica de uma rede PMC é mostrada na Figura 2. A rede PMC é do tipo feedforward (o fluxo de sinais se dá da entrada para saída) e o treinamento se dá de forma supervisionada, através do algoritmo backpropagation (a atualização dos pesos sinápticos se dá da saída para entrada). É atribuído ao desen- O treinamento é feito em duas etapas: Na primeira, os dados são apresentados à rede e esta produz a resposta na camada de saída (propagação forward). A seguir, a saída obtida é comparada à saída desejada para esta entrada de dados. Caso não seja correta, o erro é calculado e propagado a partir da camada de saída até a camada de entrada. Os pesos das camadas internas vão sendo gradativamente ajustadas em função dos pesos das camadas adiante e o erro é retropropagado (propagação backward). 2.2 Sistemas de Bombeio Centrífugo Submerso Submarino (BCSS) A produção de poços de petróleo se dá de dois modos básicos: Em elevação natural e elevação artificial. Na elevação natural, o reservatório tem energia suficiente para fazer com que o fluido escoe desde o fundo do poço até a plataforma de produção sem outros meios auxiliares. Os poços que produzem deste modo são chamados de surgentes. No caso da elevação artificial, é necessário aumentar a energia dentro do poço para que o fluido possa escoar até a unidade de produção. Atualmente os principais meios de elevação artificial offshore são o gas-lift e o bombeio centrífugo submerso submarino (BCSS). Caso os poços sejam surgentes para o leito marinho, equipamentos podem ser instalados no fundo do mar para providenciar a elevação artificial até a plataforma, como nos casos do skid-BCS e do módulo de bombeio em poço falso (MOBO). O sistema de BCSS é basicamente uma bomba centrífuga de múltiplos estágios, acionada por um motor elétrico, sendo este conjunto motor-bomba fixado na extremidade da coluna do poço. Dessa forma, o conjunto fica submerso no óleo do reservatório e o seu funcionamento cria um incremento de pressão no fundo do poço de modo a se obter a vazão desejada de óleo na superfície. Pode produzir uma gama variada de vazões (60 a 4500 m³/dia) e até 5000 m de profundidade. O sistema BCSS é dividido em dois grupos de componentes: equipamentos de subsuperfície e equipamentos de superfície. No arranjo típico, os equipamentos de subsuperfície são motor, selo, intake/separador, bomba centrífuga de multi-estágios, cabo elétrico e acessórios. Os equipamentos de superfície são os que compõem o sistema de acionamento elétrico, sistema de controle, sistema de proteção e acessórios zados para a etapa de treinamento da rede e 3376 foram utilizados para teste. As principais características deste processo de produção por BCSS foram: • • 2.3 Estimação da pressão diferencial em BCSS com rede PMC De acordo com Silva et. al (2009), uma rede PMC com uma camada escondida pode mapear qualquer função contínua real, devido a uma superposição de funções de ativação devidamente ponderadas. As etapas para solução deste problema são: definição das variáveis de entrada para a RNA; coleta dos dados; separação de uma parte dos dados para treinamento e outra para teste; treinamento da rede, teste e avaliação dos resultados. De acordo com as variáveis disponíveis para coleta e com a literatura sobre o tema, foram definidas as seguintes variáveis de entrada: Pressão de Sucção da BCSS, Temperatura na Sucção da BCSS, Corrente no Motor da BCSS, Frequência da BCSS, Vazão Bruta de Líquido e Razão Água/Óleo do fluido (BSW). Os BCSS estudados neste trabalho estão instalados em MOBOs, no entanto, o mesmo tratamento poderia ser dado para BCSS instalados em fundo de poço. Os sensores de pressão e temperatura de sucção se encontram instalados dentro do poço, na sucção da BCSS. A corrente no motor e a frequência de giro da BCSS são obtidas no inversor de frequência que aciona o motor e que fica na plataforma. Estes dados foram capturados do sistema de aquisição de dados Plant Information (PI). A vazão bruta de líquido e o BSW são obtidos nos testes de produção que ocorrem periodicamente na plataforma. A topologia da rede escolhida foi a PMC, com uma camada escondida, conforme mostrado na Figura 4. • • • • A bomba utilizada é a M675 com 48 estágios; As vazões brutas são da ordem de 2300 m³/d a 4300 m³/d; O BSW variou entre 0 e 80%; As temperaturas do fluido na sucção variam entre 68 e 78 °C e as pressões de sucção variam entre 56 e 95 bar; A razão gás-óleo (RGO) foi na média 47 m³/m³; O diferencial de pressão fornecido pela BCS variou entre 60 a 133 bar e a frequência de operação variou entre 52 a 59 Hz; Antes de executar o treinamento é necessário normalizar os dados. A equação 6 é utilizada para executar a normalização sobre a variável x. xnorm = x − xmin xmax − xmin Para montagem da rede foi utilizado o toolbox nntool do MATLAB®. A rede foi treinada com 20 neurônios na camada escondida. 3 Resultados Após a etapa de treinamento, foi executada a etapa de teste do funcionamento da rede neural, sendo apresentado a esta um conjunto de dados não utilizados na etapa de treinamento. Para avaliar o desempenho da rede na etapa de teste, foram calculados o erro absoluto médio (EAM), o erro absoluto médio percentual (EAMP), o erro máximo absoluto percentual e o coeficiente de correlação (R). As respectivas equações estão descritas a seguir: 1 n xi − yi ∑ n i =1 xi (7) 1 n xi − yi .100 ∑ n i =1 xi (8) EAM = EAM = x − yi .100 EMAP = max i xi Figura 4. Topologia da rede PMC utilizada Foram coletados 12376 conjuntos de dados de cincos poços de produção. Destes, 9000 foram utili- (6) (9) n R= ∑ (x i i =1 n ∑ (x i =1 i − x )( yi − y ) − x) 2 n ∑ (y i =1 (10) − y) 2 i Em que x e y são os valores reais e estimados e x e y são as suas respectivas médias. O número de amostras é n. Os resultados dos cálculos são mostrados na Tabela 1. Tabela 1. Erros e Coeficiente de Correlação para os dados testados na RNA. Parâmetro Valor EAM (bar) 0,3381 EAMP 0,46% EMAP 9,87% R 0,9982 A Figura 5 mostra o gráfico de dispersão, que relaciona os dados estimados com os valores reais. Assim como o coeficiente de correlação indica que quanto mais próximo de 1, melhor é a estimação, quanto mais próxima da reta unitária, melhor é a estimação indicada pelo gráfico de dispersão. diferencial de pressão em BCSS para uma dada faixa de condições operacionais. No simulador Marlim II, a BCSS foi interligada a um duto a montante e outro a jusante com 1m de comprimento cada. Para a BCSS considerou-se o escoamento bifásico sem equilíbrio de fases e correção da viscosidade pelo Hydraulic Institute (HI). Utilizou-se a curva da bomba M675A existente no simulador, com 48 estágios e a frequência (Hz) de cada caso e foram informados a pressão a montante e a vazão bruta. O modelo do fluido utilizado foi o blackoil. No simulador Olga®, a BCSS foi interligada a um duto a montante e outro a jusante com 1m de comprimento cada. Foi informado ao simulador a pressão de descarga e a vazão bruta da fonte de massa e foi utilizado o modelo composicional do fluido. A curva de desempenho da bomba M675A operando com água foi inserida no simulador manualmente. Foi necessário ainda utilizar uma válvula associada a um controlador de pressão para impor a pressão de descarga da BCSS. Para o modelo calculado em planilha Excel, o modelo de fluido utilizado foi o blackoil, com correção de viscosidade pelo Hydraulic Institute (HI). Supôs-se solubilização do gás entre os estágios e a viscosidade dinâmica foi calculada utilizando tabelas de PVT (análise do comportamento de fases do fluido multifásico). O resumo com os resultados obtidos no estudo de Borges e Pedroso (2014) estão descritos na Tabela 2: Tabela 2. Resultados da estimação com simuladores. Diferença entre o Valor Real e o Resultado do Simulador Figura 5. Gráfico de dispersão dos dados testados na RNA. 4 Discussões Borges e Pedroso (2014) desenvolveram um estudo para estimar o valor do diferencial de pressão em BCSS utilizando dois tipos diferentes de simuladores e cálculos com correlações em uma planilha. O objetivo do estudo foi comparar a capacidade de previsão dos simuladores com dados de campo obtidos a partir dos Boletins de Produção, buscando determinar se existe um simulador mais indicado para estimar o Marlim Olga Excel Nº de Casos % Nº de Casos % Nº de Casos % Até 5 bar 5 14,7 11 32,4 8 23,5 5 a 10 bar 7 20,6 3 8,8 3 8,8 10 a 15 bar 3 8,8 3 8,8 6 17,6 15 a 20 bar 5 14,7 6 17,6 3 8,8 Mais de 20 bar 14 41,2 11 32,4 14 41,2 Total 34 100 34 100 34 100 O simulador Olga® obteve os melhores resultados neste teste, no entanto, em quase 50% dos casos ele apresentou um erro de ao menos 15 bar. Por outro lado, de acordo com os resultados da Tabela 1, o erro máximo absoluto na RNA deste trabalho foi de 9,49 bar e o erro médio absoluto foi de 0,33 bar. Sendo assim, este comparativo mostra que a RNA obtida neste trabalho possui desempenho bastante superior para estimação da pressão diferencial em BCSS em relação aos simuladores comumente utilizados na indústria de óleo e gás no Brasil. 5 Conclusão Agradecimentos Os métodos tradicionais, como o do Hydraulic Institute (1955) e Turzo et al. (2000), utilizam a vazão, o head e a eficiência da bomba operando com água para encontrar fatores de correção que alteram as características como vazão, head, eficiência e potência para o caso da bomba operando com o petróleo, ou seja, os fatores simulam o efeito da degradação que ocorre na bomba devido à viscosidade do fluido (Sirino, 2013). Especialistas vêm questionando a validade do uso dos ábacos do Hydraulic Institute devido a alguns fatores, dentre eles: Agradecemos ao colega Engenheiro Otavio Ciribelli Borges da Petrobras pelo apoio no desenvolvimento deste trabalho e a Petrobras pela disponibilização dos dados. • • • O modelo foi feito para bombas centrífugas de superfície de apenas um estágio (do tipo rotor e voluta) que são construtivamente diferentes das bombas de BCSS; A correção é baseada em apenas um ponto operando com água e para uma rotação específica; Dados da literatura mostram erros, em alguns casos consideráveis, quando da utilização destes métodos para BCSS. O resultado ruim dos simuladores pode ser explicado pelo fato de se basearem nas correções do Hydraulic Institute, e sendo assim, ainda não levam em conta a correta degradação por viscosidade e a presença de gás livre nas bombas, devido principalmente a dificuldades do equacionamento e por não existir correlações práticas que levem em conta estes fenômenos, desqualificando estes simuladores para estimação do desempenho das BCSS. As RNA, por outro lado, por adquirirem o conhecimento e modelarem estes efeitos durante o treinamento, podem ser a opção de simulador para este problema. Neste trabalho foram desenvolvidos sistemas inteligentes baseados em redes neurais artificiais que podem ser utilizados como ferramentas de simulação e estimação de um problema de escoamento de petróleo. O sistema neural desenvolvido possui uma grande quantidade de informação cedida à rede para treinamento, para que pudesse representar amplamente o comportamento do sistema estudado, com mais de 9000 conjuntos de dados. Isso confere robustez e confiabilidade no desempenho das redes produzidas, conforme também pode ser observado nos gráficos de dispersão e nos erros calculados da rede testada. O desempenho da rede neural obtido neste trabalho foi bem melhor do que o obtido com simuladores padrões da indústria. A estimação de diferencial de pressão em BCSS obteve erro médio de 0,46 % e correlação de 0,9982, enquanto que o erro médio dos simuladores convencionais foi de mais de 20%. Referências Bibliográficas Borges, O. C. e Pedroso, M. C. (2014). Previsores de Head: Olga x Marlim x Excel. Vitória. Petrobras, 2014. 16 p. Estevam, V. (2002). Uma Análise Fenomenológica da Operação de Bomba Centrífuga com Escoamento Bifásico. Tese de Doutorado. Universidade Estadual de Campinas. 142 p. HYDRAULIC INSTITUTE (1955). Effects of Liquid Viscosity on Rotodynamic (Centrifugal and Vertical) Pump Performance. 22 p. Lea, J. F e Bearden, J. L (1980). Effect of Gaseous Fluids on Submersible Pump Performance. SPE 9218 General. 7 p. Paternost, G. M. (2013). Estudo Experimental Sobre Bomba Centrífuga Operando com Fluido Viscoso e Escoamento Bifásico Gás-Líquido. Dissertação de Mestrado. Universidade Estadual de Campinas. Campinas. 174 p. Sirino, T. (2013) Estudo Numérico da Influência da Viscosidade no Desempenho de uma Bomba Centrífuga Submersa. Dissertação de Mestrado. Universidade Tecnológica Federal do Paraná. Curitiba, 118 p. Solano, E. (2009). Viscous Effects on the Performance of Electro Submersible Pumps (ESP’s). Dissertação de Mestrado. The University of Tulsa. Oklahoma. 112 p. Stepanoff, A. J. (1957). Centrifugal end Axial Flow Pumps – Theory, Design and Application.2. ed. New York: John Wiley & Sons. 454 p. Turpin, J.L., Lea, J.F., Bearden, J. L. Gas (1986). Liquid Flow Through Centrifugal Pumps – Correlation of Data. 3rd International Pump Symposium, Texas A&M, 1986. 7 p. Turzo, Z.; Takacs, G. e Zsuga, J (2000). Equations Correct Centrifugal Pump Curves for Viscosity. Oil & Gas Journal. ABI/INFORM Global. 57 61 p.
Baixar