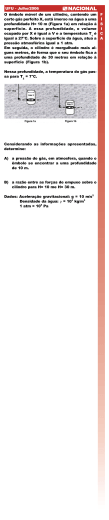
ACCIONAMENTOS ELECTRO-HIDRÁULICOS Monograma complementar à disciplina de Sistemas de Controlo de Superfícies de Comando de Voo DEEC/ENERGIA IST PAULO BRANCO 2 1 - Introdução Os conversores electromecânicos, dos quais fazem parte as máquinas eléctricas estudadas até agora, apresentam na maior parte das situações quando ligados aos accionamentos hidráulicos uma acção passiva em relação ao comando destes accionamentos. Em geral, uma máquina eléctrica ligada directamente à rede de energia impõe um determinado valor de pressão no fluido hidráulico, sendo o comando do accionamento hidráulico feito na maioria dos casos através do comando da abertura de uma servo-válvula. Actualmente, os accionamentos electro-hidráulicos procuram acabar com a acção passiva da máquina eléctrica de forma a juntar num só sistema de accionamento as vantagens dos sistemas hidráulicos e, por outro lado, o bom desempenho dinâmico do actuador eléctrico. A seguir, estabelecer-se-á a caracterização matemática simplificada de um accionamento electro-hidráulico através da elaboração do modelo matemático dos seus elementos principais. A figura 1(a) ilustra, através de um diagrama, os diferentes subsistemas que compõem o accionamento electro-hidráulico. A figura 1(b) apresenta uma fotografia de um protótipo laboratorial com a respectiva identificação dos seus principais elementos. Pelo diagrama da figura 1(a), verifica-se que o actuador hidráulico, constituído por um êmbolo linear de deslocamento máximo de 0,2m, recebe fluido de uma bomba hidráulica accionada por uma máquina síncrona de magnetos permanentes (220V/1,2Nm/±3000 r.p.m.). Esta máquina é comandada por um conversor electrónico constituído por um ondulador trifásico, além de existir um sistema de regulação da sua velocidade angular composto por um controlador ProporcionalIntegral (PI). Por fim, o accionamento electro-hidráulico pode apresentar uma segunda cadeia de regulação, composta por um controlador proporcional, e que efectua uma regulação grosseira da posição do êmbolo. O accionamento electro-hidráulico apresenta um conjunto de sensores que permitem a aquisição dos seguintes sinais: a posição do êmbolo (y), a velocidade de deslocamento linear do êmbolo (v), dois sensores de pressão (Pl1 e Pl2) em cada lado do êmbolo, e a medida da velocidade angular da máquina síncrona (ω) . 3 Sistema Electromecânico U Sistema Óleo-Hidráulico Bomba Hidráulica R S T Ondulador + PI ω Fx Máquina Síncrona + Pl1 v y Pl2 ω P y ref Êmbolo - (a) Computador Carga Pl2 v, y Pl1 Êmbolo Actuador hidráulico Bomba Máquina síncrona (b) Fig. 1 - (a) Esquema do accionamento electro-hidráulico. (b) Fotografia do protótipo laboratorial com a identificação dos elementos principais. 4 De seguida, apresentam-se os modelos matemáticos para os dois elementos principais do accionamento electro-hidráulico: a máquina síncrona de magnetos permanentes e o actuador hidráulico composto pela bomba hidráulica + êmbolo. Representação matemática da máquina síncrona de magnetos permanentes O modelo matemático mais utilizado para representar o comportamento eléctrico de uma máquina síncrona trifásica com um circuito de excitação no rotor inclui três enrolamentos no estator (indices 1, 2, 3) e um enrolamento no rotor (índice f) sendo o circuito de excitação alimentado por uma tensão contínua e colocado longitudinalmente no rotor. Como se referiu no estudo da modelização da máquina assíncrona trifásica, os modelos matemáticos obtidos tornam-se muito difíceis de serem manipulados, além de apresentarem os valores das indutâncias próprias e mútuas dependentes da posição do rotor relativo ao estator. O mesmo se passa com a modelização das máquinas síncronas trifásicas. Desta forma, o modelo das máquinas síncronas é obtido de modo similar ao desenvolvimento do modelo dq da máquina assíncrona pela utilização da transformação de Park. A transformação do sistema trifásico das tensões e correntes nas fases (índices 1, 2, 3) no novo referencial dq solidário com o rotor é efectuada por: udq = Tu123 (1) idq = Ti123 (2) onde a matriz de transformação T é dada por: 2π 4π θ − − cos( θ ) cos( θ ) cos( ) 2 3 3 T= 3 − sen(θ) − sen(θ − 2π ) − sen(θ − 4π ) 3 3 (3) Para estabelecer um modelo simplificado, mas representativo do comportamento dinâmico da máquina síncrona de magnetos permanentes, consideram-se as seguintes hipóteses: 1. Funcionamento da máquina síncrona com neutro isolado; 2. Máquina de topologia sinusoidal; 5 3. O valor do fluxo φ f associado aos magnetos permanentes é considerado constante; O modelo eléctrico da máquina síncrona de magnetos permanentes em coordenadas de Park é descrito pelas equações did 1 = (u + ωLq iq − Rid ) dt Ld d diq dt = 1 (u + ωLd id − Riq − ωφ f ) . Lq q (4) (5) As grandezas de entrada da máquina síncrona serão as tensões ud e uq obtidas pela aplicação da matriz de transformação T às tensões trifásicas u1 , u2 , u3 . As variáveis de estado eléctricas correspondem às correntes id e iq também obtidas pela aplicação da matriz de transformação T às correntes trifásicas i1 , i2 , i3 . Nas equações, os valores das resistências equivalentes do estator e rotor são consideradas iguais a R = Rd = Rq , os parâmetros Ld e Lq são os coeficientes constantes de auto-indução, φ f representa o valor constante do fluxo magnético associado aos magnetos permanentes no rotor, e ω é a velocidade angular do rotor. O binário electromagnético Te é dado pela equação [ ] Te = ( Ld − Lq )id + φ f iq , (6) a qual estabelece a ligação entre as variáveis eléctricas da máquina e a carga mecânica acoplada ao seu veio. No caso do accionamento electro-hidráulico, a carga mecânica aplicada irá corresponder ao binário resistente imposto pela bomba hidráulica à máquina síncrona. As equações que descrevem o comportamento das grandezas mecânicas são expressas por: dω 1 = (T − TH ) dt J e dθ =ω dt (7) (8) Nelas, TH significa o binário resistente exercido no veio da máquina, no caso do accionamento electro-hidráulico, o binário resistente oferecido pelo sistema 6 hidráulico à máquina síncrona, e J representa o valor do momento angular de inércia do conjunto máquina síncrona e bomba hidráulica. Representação matemática do sistema óleo-hidráulico Os sistemas óleo-hidráulicos apresentam, em geral, bombas hidráulicas, elementos de regulação como por exemplo válvulas limitadoras de pressão, elementos de distribuição como as servo-válvulas manuais ou eléctricas, e elementos denominados receptores representados pelos actuadores hidráulicos como, por exemplo, os cilindros lineares. No sistema óleo-hidráulico do accionamento em estudo, irão ser destacados dois elementos principais: a bomba hidráulica e o cilindro linear ou êmbolo. Bomba ω Carga Cilindro qb Fx Reservatório Fig. 2 - Representação do sistema óleo-hidráulico. O caudal volumétrico total fornecido pela bomba hidráulica ao êmbolo, qb , é uma função apenas da velocidade angular ω da bomba já que esta tem cilindrada constante: qb = qb (ω) (9) A figura a seguir ilustra o caudal debitado por uma bomba hidráulica em função da [ ] sua velocidade angular e para diferentes cilindradas ALL m3 / rad . 7 Fig. 3- Relações caudal-velocidade dependentes da cilindrada da bomba. Deste modo, para um determinado intervalo de velocidades ω [ rad / s] , o caudal possível de ser debitado pela bomba hidráulica com uma cilindrada constante é dada por: qb = ALLω (10) No entanto, devido a possíveis quedas de pressão no interior da bomba, ocorrem fugas de fluido devidas sobretudo às perdas de caudal através das folgas existentes na bomba. Este caudal de dispersão, q f , é proporcional à pressão Pl desenvolvida pela bomba. Isto é, q f = LPl , (11) onde L é designado por coeficiente de perdas. Uma variação ∆Vc de um determinado volume de óleo sobre pressão, V, é proporcional à diferença de pressão ∆Pl exercida sobre o volume, e proporcional também ao volume de fluido V considerado. A variação ∆Vc é dada pela equação ∆Vc = V ∆P , KB l (12) onde o termo K B é o módulo de Bulk do fluido utilizado. O caudal relativo à compressibilidade do fluido, qc , vai corresponder então à variação do volume ∆Vc com o tempo, sendo expresso pela relação 8 ∆Vc V dPl = K B dt ∆t → 0 ∆t qc = lim (13) O fluido fornecido ao êmbolo causa uma variação no seu volume dada pela multiplicação da sua área útil, C p , e o deslocamento ∆y efectuado. O caudal qo fornecido vai pois corresponder a uma variação do volume do êmbolo no tempo, sendo expresso pela equação dy qo = C p = C pv dt (14) O caudal de fluido entregue ao êmbolo, qo , vai pois corresponder , pela lei de conservação da massa, ao caudal total debitado pela bomba, qb , subtraindo-se as fugas de fluido na bomba, q f , e o caudal relativo ao efeito de compressibilidade do fluido, qc , como mostra a relação qo = qb − qc − q f (15) Substituindo-se as expressões de cada caudal na relação acima, chega-se à expressão dPl K B = (qb − LPl − C p v ) (16) dt V O modelo que descreve o comportamento das grandezas mecânicas do sistema hidráulico, posição (y) e velocidade linear do êmbolo (v), é representado pelas equações dv 1 = (C P − Bv − Fx ) dt M p l dy =v dt (17) (18) Neste sistema de equações, M representa o valor da massa do êmbolo, B representa o coeficiente de atrito no êmbolo, Fx é a determinada força externa exercida sobre o êmbolo, e o termo C p Pl a força desenvolvida pelo êmbolo sendo esta proporcional à diferença de pressão Pl multiplicada pela área útil do êmbolo C p . A potência fornecida ao actuador hidráulico, qb Pl , é igual à potência mecânica no motor, TH ω. Como o caudal qb depende de ω por qb = ALLω , o binário resistente imposto pelo sistema hidráulico ao motor, TH , torna-se uma função da diferença de pressão Pl exercida sobre o êmbolo e da cilindrada da bomba, no caso constante, como indicado em TH = A LL Pl (12) 9 2 - Comportamento dinâmico do accionamento electro-hidráulico Esta é a primeira etapa a ser considerada no processo de modelização do accionamento, devendo as variáveis serem escolhidas com base no conhecimento disponível sobre o sistema. Este conhecimento pode ser obtido, como verificamos anteriormente no capítulo 4, das leis físicas que comandam o comportamento do sistema e utilizadas na construção de um modelo matemático aproximado que caracterize o sistema. Na obtenção do modelo matemático do accionamento electro-hidráulico consideram-se três subsistemas que interagem entre si: o subsistema eléctrico representado pelo conjunto do conversor electrónico e a máquina síncrona de magnetos permanentes; o subsistema óleo-hidráulico composto pela bomba, circuito hidráulico e o êmbolo; e o subsistema mecânico representado pela carga acoplada ao êmbolo. O subsistema eléctrico é representado por um diagrama de blocos na figura 6.3 constituído pelo conversor electrónico e a máquina síncrona de magnetos permanentes. O conversor é responsável por controlar a velocidade (ω) da máquina síncrona de forma a seguir a referência de velocidade imposta (ωref ) utilizando um regulador PI. A figura 6.4 ilustra o controle da velocidade do motor, efectuado pelo regulador PI, velocidades ±2000 r.p.m. ωref para um sinal de referência tipo escalão entre o intervalo de Conversor electrónico ω id iq Máquina síncrona de magnetos permanentes TH Fig. 4 - Diagrama representativo do subsistema eléctrico. ω 10 ωref ω 3000 2000 1000 ωref ,ω [r.p.m.] 0 -1000 -2000 -3000 0 1 2 3 4 5 6 7 8 9 10 Tempo [s] Fig. 5 - Evolução do sinal de velocidade da máquina síncrona (ω) para um sinal de referência (ωref ) tipo escalão utilizando-se o regulador PI do conversor electrónico. Pela caracterização matemática realizada na secção 4.2 para o subsistema eléctrico, considerando-se como hipóteses simplificadoras a actuação perfeita dos reguladores de corrente e de velocidade do motor, o subsistema eléctrico pode ser descrito pela relação (6.1). ωref → ω (13) O subsistema óleo-hidráulico é composto pela bomba e pelo circuito hidráulico. Da mesma maneira que para o subsistema eléctrico, os seus elementos são representados na forma de blocos funcionais conforme ilustrado na figura 6.5. O bloco representativo da bomba hidráulica é responsável pelo caudal de fluido qb que é fornecido ao circuito hidráulico. De forma simplificada, a taxa de caudal volumétrico qb fornecido pela bomba pode ser directamente relacionada com a velocidade angular da bomba (ωb ) , como se indica em (6.3). ωb → qb (14) 11 v ω Bomba hidráulica qb Fx Piston Pl y ωb Fig. 6 - Diagrama representativo do subsistema óleo-hidráulico. Do modelo matemático estabelecido anteriormente na secção 4.2 para o subsistema hidráulico, pode-se estabelecer a relação (6.4) em que o sinal de posição do êmbolo ( y ) é função do caudal da bomba ( qb ), da diferença de pressão exercida sobre o êmbolo ( Pl ) , e por último da sua velocidade de deslocamento (v). ( qb , Pl , v ) → y (15) Além disso, os resultados experimentais mostraram que, quando Fx = 0.0 , isto é, a carga é inercial pura, a variável pressão não desempenha um papel significativo. Além de se desprezar os efeitos do atrito, verifica-se pela equação (6.5) que o sinal da diferença de pressão ( Pl ) sobre o êmbolo terá uma magnitude muito reduzida, podendo então ser desprezada da relação (6.4). M M dv = C p Pl − Fx dt dv = C p Pl dt ( Fx ≈ 0) ( dv ≈ 0 → Pl ≈ 0) dt (16) Tomando-se em consideração as hipóteses anteriores, a relação (6.4) fica simplificada na relação (6.6). ( qb , v ) → y (17) A análise sobre os dois subsistemas que compõem o accionamento electro-hidráulico permitiu caracterizá-lo pelo conjunto de relações descrito em (6.7). Considerando as hipóteses de que o controlador de velocidade do motor síncrono tem um bom desempenho e se pode considerar que ωref = ω , assim como a velocidade angular da bomba (ωb ) é também considerada igual à velocidade da máquina síncrona (ω) acoplada a ela, obtém-se a relação final (6.8) para representar o sistema electrohidráulico quando não há uma carga significativa acoplada. 12 ωref → ω ωb → qb (qb , v ) → y (18) (ω, v ) → y (19) Contudo, caso haja uma carga Fx significativa aplicada ao êmbolo, o sinal da diferença de pressão ( Pl ) já não poderá ser desprezado, tornando-se importante para a descrição da dinâmica do sistema. Assim, a relação final deverá conter também a informação do sinal ( Pl ) , ficando estabelecida a relação (6.9). (20) (ω, v , Pl ) → y Considerando-se o sistema global composto pelo accionamento electro-hidráulico e a acção reguladora do controlador proporcional para o comando da posição do êmbolo, a relação (6.9) passa a ser representada pela relação (6.10), passando-se a considerar também o sinal de referência da posição do êmbolo yref . (21) y = f ( yref , ω, v , Pl ) y ref 0.2 y ,y [m] y ref 0.1 0 5 0 10 15 Tempo [min] 20 25 30 (a) ω [r.p.m.] 2000 0 -2000 0 5 10 15 Tempo [min] 20 25 30 20 25 30 (b) v [m/s] 0.1 0 -0.1 0 5 10 15 Tempo [min] (c) Fig. 7 - Conjunto de treino obtido do sistema electro-hidráulico. (a) Evolução do sinal de referência ( yref ) e do sinal de posição ( y ) do 13 êmbolo. (b) Evolução do sinal de velocidade angular da bomba hidráulica (ω) . (c) Evolução do sinal de velocidade do êmbolo (v ) . Considerações a respeito da implementação dos controladores Montagem laboratorial Para a implementação das três topologias de controlo com aprendizagem da posição do accionamento electro-hidráulico, utilizou-se um computador pessoal PC386 a 33 MHz e uma interface de aquisição de sinais conforme se ilustra na figura 7.1. Todos os cálculos do algoritmo de controlo são realizados em tempo-real através da sua programação em linguagem C, utilizando os sinais recolhidos do sistema de accionamento pela placa de aquisição de sinais (A/D-D/A). Cada ciclo de operação do controlador compreende: - leitura dos sinais do sistema electro-hidráulico: O conjunto de variáveis recolhido consiste: no sinal de posição e de velocidade do êmbolo, y e v respectivamente, a velocidade angular do motor considerada igual à da bomba hidráulica, ω, e o sinal de referência para a posição do êmbolo, yref , fornecido por um gerador de sinais ao computador através da porta A/D da placa de aquisição de sinais (figura 7.1); - realização do algoritmo de controlo: Neste ciclo de operação, o conjunto de sinais recolhidos do sistema é codificado num conjunto de regras através do algoritmo de aprendizagem implementado no computador, o algoritmo fuzzy simplificado ou o algoritmo de aprendizagem supervisionada (neuro-fuzzy). Estas regras são relacionadas com aquelas já contidas na relação inversa de maneira a actualizá-las, optimizando-se o conhecimento em forma de regras já acumulado. - mecanismo de inferência: Após se modificar, ou incluir novas regras na relação inversa, o sistema de controlo aplica o mecanismo de inferência sobre a base de regras por forma a gerar o sinal de compensação; 14 PC386 Computador Controlador com Aprendizagem Carga inercial Pl v y, v Placa de A/D aquisição Êmbolo Pl D/A y Circuito hidráulico y ref Gerador de sinais ω Conversor electrónico + PI Bomba ωref Motor ω y ref + P ω p y + ω comp ωref Cadeia de retroacção Fig. 8 - Representação do controlador de posição para o sistema electrohidráulico implementado. A figura 7.2 apresenta os resultados do sistema electro-hidráulico com o regulador proporcional incorporado para uma referência sinusoidal de posição ( yref ). A figura mostra a evolução da posição do êmbolo e do sinal de referência (figura 7.2(a)), o respectivo sinal da velocidade angular da bomba hidráulica (figura 7.2(b)), e a velocidade de deslocamento do êmbolo (figura 7.2(c)). Constata-se pelos resultados da figura 7.2(a) que, quando em cadeia fechada, o êmbolo segue o sinal de referência ( yref ) com um atraso assimétrico, além de apresentar um erro de posição acentuado também motivado pela utilização de um regulador proporcional. Deve-se o aparecimento desta evolução assimétrica no comportamento do accionamento electro-hidráulico à característica não-linear da bomba. Quando a bomba hidráulica apresenta valores de velocidade no intervalo da zona-morta, destacada na figura 7.2(b), o sistema electromecânico torna-se desacoplado do sistema hidráulico, o que torna praticamente nulo o caudal debitado 15 pela bomba, não havendo diferença de pressão no êmbolo suficiente ao seu deslocamento. A figura 7.2(c) indica os períodos em que o êmbolo está parado, correspondentes àqueles em que a bomba funciona no interior da zona-morta. No sentido de se obter uma melhor visualização do efeito que a zona-morta provoca na evolução do accionamento, destaca-se na figura 7.3 um intervalo de funcionamento do sistema electro-hidráulico nesta região. A figura apresenta o intervalo de velocidades correspondente ao funcionamento da bomba na zona-morta, além de mostrar os intervalos em que ocorre o desacoplamento entre o subsistema electromecânico e o subsistema hidráulico, e nos quais o êmbolo apresenta velocidade nula. yref y yref ,y [m] 0.2 0.1 0 0 2 4 6 8 12 10 Tempo [s] 14 16 18 20 (a) ω [r.p.m.] Zona-morta 2000 } 0 -2000 0 2 4 6 8 12 14 16 18 20 12 10 Tempo [s] 14 16 18 20 10 Tempo [s] (b) v [m/s] 0.2 0 -0.2 0 2 4 6 8 (c) Fig. 9 - Resultados experimentais do comportamento do sistema electrohidráulico em cadeia fechada com o regulador proporcional. (a) Evolução da posição do êmbolo ( y ) e do sinal de referência ( yref ) . (b) Sinal da velocidade angular da bomba hidráulica (ω) . (c) Velocidade de deslocamento do êmbolo (v ) . 16 ω [r.p.m.] 2000 0 -2000 Zona morta [-700, 900] 6 4 2 0 Regiões de desacoplamento entre o sistema electromecânico e o sistema hidráulico v [m/s] 0.2 0 -0.2 6 4 2 0 Fig. 10 - Detalhe da evolução do sinal de velocidade angular da bomba e do sinal de velocidade de deslocamento do êmbolo, destacando-se o efeito exercido sobre o comportamento do sistema pela característica não-linear da bomba hidráulica. yref ,y (m) 0.2 0.1 0 0 2 4 6 8 10 12 Tempo (s) 14 16 18 20 2 4 6 8 12 10 Tempo (s) 14 16 18 20 2 4 6 8 10 12 Tempo (s) 14 16 18 20 14 16 18 20 erro (m) 0.04 0.02 0 -0.02 -0.04 ω 0 (r.p.m.) 2000 0 -2000 0 v (m/s) 0.2 0 -0.2 0 2 4 6 8 12 10 Tempo (s) 17 Situacao: neste caso o sistema está a funcionar somente com o regulador proporcional K=2.07. Percebe-se que o sistema em si não é simétrico na subida e descida.
Baixar