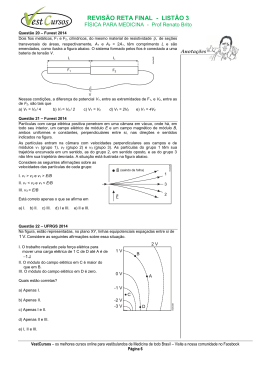
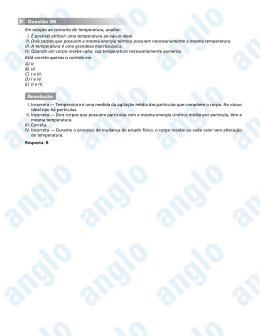
X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil FILTRAGEM ESTOCÁSTICA APLICADA A SISTEMAS MAX-PLUS LINEARES D IEGO F IGUEIRÊDO E S ILVA∗, R AFAEL S ANTOS M ENDES∗, L AURENT H ARDOUIN†, C ARLOS A NDREY M AIA‡, B ERTRAND C OTTENCEAU† ∗ † Faculdade de Engenharia Elétrica e de Computação - UNICAMP DCA/FEEC/UNICAMP-C.P. 6101 13083-970 Campinas - SP - Brasil Laboratoire d’Ingénierie des Systèmes Automatisés - ISTIA/Université d’Angers Av. Notre Dame du Lac 62 49000 Angers - França ‡ Depto. de Engenharia Elétrica - UFMG Av. Antônio Carlos 6627 - Pampulha 31270-010 Belo Horizonte - MG - Brasil Emails: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— This paper proposes a particle filter for linear max-plus systems. A brief introduction to discrete event systems is presented in a max-plus context. The paper describes some fundamental results in particle filtering and applies these results to the max-plus linear systems leading to a stochastic filtering algorithm. An example illustrates the method and some conclusions are drawn. Keywords— Stochastic Filtering, Discrete Event Systems, Max-plus Algebra, Particle Filters Resumo— Este trabalho propõe um filtro estocástico do tipo filtro de partículas para sistemas max-plus lineares. Uma pequena introdução aos sistemas a eventos discretos no contexto da abordagem max-plus é apresentada. Em seguida os fundamentos de filtros de partículas, aplicados aos sistemas max-plus, são descritos, chegando assim a um algoritmo de filtragem estocástica. Um exemplo ilustrativo é apresentado e são esboçadas conclusões. Palavras-chave— 1 Filtragem Estocástica, Sistemas a Eventos Discretos, Álgebra Max-plus, Filtros de Partículas Introdução O desenvolvimento das técnicas de filtragem estocástica (Brown and Hwang, 1997) vem permitindo os avanços em várias áreas de pesquisa, em especial na geração de tecnologia espacial e militar (Bar-Shalom et al., 2001). Pode-se citar particularmente o filtro de Kalman (Brown and Hwang, 1997), cuja presença se tornou indispensável em equipamentos eletrônicos de comunicação via frequência modulada (FM) e em sistemas de rastreamento aéreo e de navegação (BarShalom et al., 2001). Os Sistemas a Eventos Discretos (SED) (Cassandras and Lafortune, 1999) constituem uma classe de sistemas caracterizados pelo fato de sua dinâmica ser dirigida pela ocorrência de eventos, em oposição aos sistemas contínuos cuja dinâmica é determinada pela passagem do tempo. Num SED as mudanças de estado ocorrem única e exclusivamente devido à ocorrência de eventos. O estudo destes sistemas é de fundamental importância em diversas áreas como redes de computadores, sistemas de tráfego e no planejamento de atividades de carácter logístico, podendo-se destacar a sua aplicação nos sistemas de manufatura, onde é utilizado para otimizar o tempo de produção e o uso do estoque (Maia et al., 2005). Dentre os modelos existentes para o tratamento de tais sistemas, destacam-se as Redes de Petri (RP) (Murata, 1989) e a abordagem baseada na álgebra de ISSN: 2175-8905 - Vol. X dióides, ou mais simplesmente, na álgebra max-plus (Baccelli et al., 1992). Esta última é a abordagem utilizada neste trabalho. Um enfoque possível para os SED considera como variáveis de modelagem os “datadores”, isto é, as informações relativas aos instantes de ocorrência de eventos. Neste contexto, podem ocorrer situações práticas onde nem todos os datadores são diretamente observados, de forma análoga ao que ocorre em sistemas contínuos nos quais o estado não é totalmente observado. Além disso, é comum que os datadores não observados tenham seus valores influenciados por variáveis aleatórias, que combinadas com os aspectos estruturais do sistema provocam variações aleatórias nos instantes de ocorrência dos eventos. O presente trabalho pretende abordar exatamente esta situação, tratando do problema de obter estimativas ótimas, num contexto ruidoso, de instantes de ocorrência de eventos não-observáveis em SED. Estas estimativas deverão ser obtidas de modo análogo ao utilizado nos filtros de Kalman para sistemas contínuos, isto é, a partir de observações de algumas variáveis do sistema, obter-se-ão estimativas de outras variáveis não-observadas sujeitas a perturbações estocásticas previamente modeladas. A técnica de filtragem conhecida como “Filtro de Partículas” será utilizada neste trabalho. Os filtros de partículas utilizam o conceito de simulação de Monte-Carlo, isto é, produzem uma aproximação de uma distribuição proba- 1388 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil bilística através de um grande número de amostras às quais são atribuídos pesos. Estas amostras evoluem de acordo com a dinâmica do sistema e têm seus pesos atualizados a partir da existência de medidas das saídas do sistema. O artigo está organizado como segue. Na seção 2 os sistemas max-plus são brevemente descritos, definindo-se também o cenário de perturbações que afetam o sistema. A seção 3 descreve o princípio de funcionamento do filtro de partículas e a maneira pela qual ele pode ser aplicado aos sistemas maxplus lineares com perturbação. Finalmente, na seção 4 apresentam-se alguns resultados de simulação numérica e na seção 5 esboçam-se algumas conclusões. 2 Álgebra Max-Plus É possível modelar um sistema a eventos discretos como uma rede de Petri (Baccelli et al., 1992). Uma rede de Petri é um objeto abstrato constituído de um grafo bi-partido e de uma marcação (função). No grafo os nós podem ser de dois tipos: lugares e transições. A marcação associa a cada lugar um número inteiro (diz-se que o lugar contém fichas). As transições estão relacionadas aos eventos do sistema e os lugares definem condições para que estes eventos ocorram. Uma transição pode disparar se os lugares acima dela contêm fichas. Neste trabalho consideraremos RP p-temporizadas, nas quais os lugares têm um tempo de permanência mínimo para as fichas. O disparo de uma transição altera a marcação da rede, redefinindo as condições de disparo e produzindo a dinâmica do sistema. Neste contexto, os recursos do sistema são representados por fichas nas diversas posições do processo de produção, as durações das atividades são representadas pelo tempo de permanência das fichas nos lugares e as ocorrências dos eventos são representadas pelos disparos das transições, que consomem fichas nos lugares anteriores à transição e produzem fichas nos lugares seguintes à transição. Uma classe importante de redes de Petri são os Grafos de Eventos Temporizados (GET), caracterizados por apresentarem um único arco de entrada e um único arco de saída em cada lugar. Na figura 1 apresenta-se um grafo de eventos temporizado. Figura 1: Exemplo de Grafo de Eventos Temporizado ISSN: 2175-8905 - Vol. X Nesta figura é importante observar a existência de transições não condicionadas por nenhuma outra transição do sistema (transição u na figura) e transições que não condicionam nenhuma outra transição do sistema (transição z na figura). Estas transições são chamadas respectivamente de entrada e de saída do sistema; as outras transições são chamadas de internas ou transições de estado. Assume-se que apenas as transições de saída do sistema são observadas no contexto de filtragem desenvolvido na próxima seção. Pode-se associar a cada transição de um GET uma seqüência crescente de números inteiros {x(k)}, para k = 0, 1, 2, . . ., onde cada elemento da série representa o instante do k-ésimo disparo dessa transição. Supondo agora conhecida a seqüência associada às transições de entrada de um GET, é possível determinar as seqüências de disparo de todas as transições do GET. De fato, considerando novamente o GET da figura 1, é possível escrever as seguintes relações entre os instantes de disparo das transições: x1 (k) = 1 + x2 (k − 1) (1a) x2 (k) = max{2 + x2 (k − 1); u(k)} (1b) z(k) = max{2 + x1 (k); 1 + x2 (k)} (1c) Renomeando o operador max como sendo ⊕ e o operador + como sendo ⊗, pode-se reescrever: x1 (k) = 1 ⊗ x2 (k − 1) (2a) x2 (k) = 2 ⊗ x2 (k − 1) ⊕ u(k) (2b) z(k) = 2 ⊗ x1 (k) ⊕ 1 ⊗ x2 (k) (2c) ou, em forma matricial: xk = A ⊗ xk−1 ⊕ B ⊗ uk zk = C ⊗ xk (3) sendo: −∞ 1 −∞ ; B= ; C= 2 1 −∞ 2 0 T xk = x1 (k) x2 (k) ; uk = u(k) e zk = z(k) A= Tem-se portanto um sistema de equações recursivas lineares numa nova álgebra. De modo geral, um semi-anel idempotente (ou dióide) é caracterizado por um conjunto e duas operações (soma e produto), notado (D, ⊕, ⊗), tal que a soma seja associativa, comutativa e idempotente (a ⊕ a = a), e o produto seja associativo (mas não necessariamente comutativo) e distributivo à esquerda e à direita em relação à soma. Além disso, devem existir elementos neutros para ambas as operações, notados por ε (elemento nulo) e por e (elemento unitário), e o elemento nulo deve ser absorvente em relação ao produto. Isto é, ∀a ∈ D, a ⊕ ε = a, a ⊗ e = a, a ⊗ ε = ε. É imediato perceber que o conjunto Z ∪ {−∞} munido das duas operações ⊕ ≡ max e ⊗ ≡ + é um dióide, no qual ε = −∞ e e = 0. Um dióide é completo se ele for fechado em relação a somas infinitas e se o produto for 1389 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil distributivo em relação a somas infinitas. A estrutura (Z ∪ {−∞} ∪ {∞}, max, +) é um dióide completo usualmente denominado Max-plus e notado por Zmax . Este exemplo utiliza o que se convenciona chamar de datadores, isto é, sequências crescentes {x(k)} que representam as datas ou instantes de ocorrência dos disparos da transição x. Observa-se que, formalmente, as equações 3 são muito similares às equações de estado em sistemas com dinâmica contínua. Os sistemas abordados neste trabalho são, por definição os sistemas a eventos discretos que podem ser descritos pelas equações 3 admitindo-se em geral que xk ∈ Rn×1 , uk ∈ Rp×1 e zk ∈ Rq×1 e que as matrizes A, B e C tem dimensões apropriadas. Além disso, duas hipóteses adicionais são consideradas. Por um lado admite-se que a matriz C contém exatamente um elemento e em cada linha, sendo todos os outros iguais a havendo no máximo um elemento e em cada coluna. Esta hipótese não é restritiva pois qualquer sistema do tipo da equação 3 pode ser colocado nesta forma pela inclusão de linhas e colunas nas matrizes A e B (Hardouin et al., 2010). Em outras palavras assume-se que a matriz C tem a matriz identidade como sub-matriz e que algumas das variáveis internas são diretamente observadas. Pode-se portanto reescrever o modelo dado pela equação 3 da seguinte forma: xk = A ⊗ xk−1 ⊕ B ⊗ uk (4) x00k zk = 0 0 xk A sendo xk = e A = . A partir destas x00k A00 equações é possível escrever: zk = A00 ⊗ xk−1 ⊕ B ⊗ uk (5) Por outro lado, assume-se que as perturbações que afetam o sistema atuam exclusivamente nos elementos da matriz A e da matriz B, admitindo-se que os elementos aij e bij destas matrizes são variáveis aleatórias independentes entre si com distribuições uniformes e conhecidas. No contexto deste trabalho o problema de filtragem consiste portanto em obter estimativas para os estados não diretamente observados x0k conhecendose uma sequência de medidas zj e de entradas uj , j = 1, . . . , k e a distribuições de probabilidade dos elementos das matrizes A e B. 3 Filtros de Partículas aplicados a Sistemas Max-Plus Os Filtros de Partículas utilizam uma representação por partículas da densidade de probabilidade do estado do sistema para realizar uma estimação sequencial de Monte-Carlo1 deste estado. Uma representação por partículas é um conjunto de amostras da variável que se deseja estimar, amostradas de acordo com 1 Uma estimação sequencial de Monte-Carlo é uma técnica para a implementação de um filtro Bayesiano recursivo através de simulações de Monte-Carlo (Ristic et al., 2004) ISSN: 2175-8905 - Vol. X uma densidade chamada "densidade de importância". O método de R Monte-Carlo é baseado no seguinte fato. Seja I = g(x) dx uma integral que se deseja avaliar e π(x) uma densidade de probabilidade tal que g(x) = f (x) · π(x). Se for possível sortear N amostras da variável x de acordo com a densidade π(x) PN {xi , i = 1, . . . , N }, então IN = N1 i=1 f (xi ) é uma estimativa não-polarizada da integral I. Além disso, se as amostras da variável x forem sorteadas segundo uma outra densidade q(x), similar2 a π(x), PN i i i então IN = i=1 f (x ) · w(x ), sendo w(x ) = 1 N w̃(xi ) PN j j=1 w̃(x ) e w̃(xi ) = π(xi ) q(xi ) . A densidade q(x) é a densidade de importância. Considerando agora um sistema max-plus linear conforme descrito na seção anterior, seja Xk = {xj }, j = 0, . . . , k o conjunto de todos os valores das variáveis de estado x até o instante k e seja Zk definido de modo análogo. Uma abordagem comum para o problema de filtragem consiste em realizar o cálculo da probabilidade p(Xk |Zk ) a partir da probabilidade p(Xk−1 |Zk−1 ) e do valor da medida zk . Contudo, levando em conta a equação 4 e que os elementos da matriz A são variáveis aleatórias independentes, concluise que, dado xk−1 , os vetores x0k e x00k = zk são independentes. Em outras palavras: p(X0 k |Xk−1 , zk ) = p(X0 k |Xk−1 ). A melhor estimativa que se pode ter do estado x0k depende exclusivamente da estimativa do estado xk−1 . Por este motivo busca-se neste trabalho um procedimento recursivo para a obtenção da probabilidade p(Xk−1 |Zk ), em função da probabilidade p(Xk−2 |Zk−1 ) e da medida zk . A representação para as densidades de probabilidade acima é feita através do conceito de "partículas", isto é, supõe-se a existência de um conjunto de amostras (ou partículas) {Xik−1 }, i = 1, . . . , N amostrado segundo a densidade de importância q(Xk−1 |Zk ) com os respectivos pesos {wki } que representam a probabilidade p(Xk−1 |Zk ), isto é: p(Xk−1 |Zk ) ∼ = N X wki · δ(Xk−1 − Xik−1 ) (6) i=1 Conforme a discussão ao início desta seção temse que: p(Xik−1 |Zk ) wki ∝ q(Xik−1 |Zk ) Deseja-se portanto, a partir de uma representação de p(Xk−2 |Zk−1 ) (do tipo definido pela equação 6) e da medida zk , obter uma representação por partículas para p(Xk−1 |Zk ). Para obter fórmulas recursivas adequadas, deve-se escolher uma densidade de importância que satisfaça a seguinte condição de fatorização: q(Xk−1 |Zk ) , q(xk−1 |Xk−2 , Zk ) · q(Xk−2 |Zk−1 ). (7) 2 Uma densidade de probabilidade q(x) é similar a π(x) se ∀x : π(x) > 0 ⇒ q(x) > 0. 1390 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil A densidade q(xk−1 |Xk−2 , Zk ) deve ser utilizada para expandir a partícula Xik−2 para Xik−1 , incluindo um novo estado xik−1 . A equação de atualização do respectivo peso wki é obtida a seguir. Tem-se: p(Xk−1 |Zk ) = = p(Xk−1 |zk , Zk−1 ) p(zk |Xk−1 , Zk−1 ) · p(Xk−1 |Zk−1 ) = , (8) p(zk |Zk−1 ) wki mas dado que: p(Xk−1 |Zk−1 ) = = p(xk−1 |Xk−2 , Zk−1 ) · p(Xk−2 |Zk−1 ) ∼ (9) = p(xk−1 |xk−2 ) · p(Xk−2 |Zk−1 ), pode-se substituir (9) em (8) obtendo-se a seguinte expressão: p(Xk−1 |Zk ) = p(zk |xk−1 ) · p(xk−1 |xk−2 ) · p(Xk−2 |Zk−1 ) p(zk |Zk−1 ) p(zk |xk−1 ) · p(xk−1 |xk−2 ) · p(Xk−2 |Zk−1 ). ∼ = ∝ Mas: wki Esta escolha permite avançar o contador k no processo de filtragem simplesmente multiplicando-se (⊗) uma nova realização das matrizes A e B por cada partícula xik−2 , i = 1, . . . , N e pelos valores conhecidos de uk−1 , expandindo assim a partícula Xik−2 para Xik−1 . Esta etapa é similar, em filtragem de Kalman, ao procedimento de previsão do estado. A substituição da equação 11 na equação 10 resulta em: ∝ p(Xik−1 |Zk ) q(Xik−1 |Zk ) ∝ p(zk |xik−1 ) · p(xik−1 |xik−2 ) · p(Xik−2 |Zk−1 ) q(xik−1 |Xik−2 , Zk ) · q(Xik−2 |Zk−1 ) ∝ p(zk |xik−1 ) · p(xik−1 |xik−2 ) i · wk−1 , q(xik−1 |Xik−2 , Zk ) i = wk−1 · p(zk |xik−1 ). Esta equação é utilizada para atualizar os pesos das partículas no momento em que a medida zk se torna disponível. Em filtragem de Kalman isto equivale ao procedimento de atualização das previsões, isto é, o procedimento de correção da estimativa feita no procedimento de previsão, à luz de uma nova medida. Levando-se em conta que tanto a medida zk quanto a partícula xik−1 e as variáveis de entrada uk são conhecidas no momento deste cálculo, conclui-se que a atualização deve ser feita por: wki i = wk−1 · V (ηk , zk ), = i wk−1 p(zk |xik−1 ) · p(xik−1 |xik−2 ) . · q(xik−1 |Xik−2 , Zk ) Admite-se ainda: q(xik−1 |Xik−2 , Zk ) = q(xik |xik−2 , zk ) e finalmente: wki = i wk−1 · p(zk |xik−1 ) · p(xik−1 |xik−2 ) .(10) q(xik−1 |xik−2 , zk ) Desde que respeitada a condição de similaridade citada no início desta seção, em princípio a função de densidade de importância pode ser escolhida com liberdade. Entretanto, segundo (Ristic et al., 2004) esta escolha é um aspecto crítico em filtros de partículas. Mostra-se em (Doucet and Andrieu, 2000) que a escolha ótima é dada por: qopt (xik−1 |xik−2 , zk ) = p(xik−1 |xik−2 , zk ). Visando a simplicidade do algoritmo, neste trabalho adotar-se-á uma escolha sub-ótima para a densidade de importância dada por: q(xik−1 |xik−2 , zk ) = p(xik−1 |xik−2 ). (11) ISSN: 2175-8905 - Vol. X (13) sendo a função de verossimilhança V (η, z) deduzida T no apêndice (equação 15) e ηkT = [xiT k−1 | uk ]. Observa-se que o procedimento de previsão baseado na equação 11 não depende da ocorrência da késima medida zk . Portanto nada impede que seja realizado logo após a atualização da estimativa de Xk−1 , resultando, conforme discutido anteriormente, na melhor estimativa possível para xk dadas as medidas em k. A estimativa de xk é portanto dada por: Portanto: wki (12) x̂k = N X xik · wki . (14) i=1 É usual na evolução de um algoritmo de filtragem por partículas a observação de um fenômeno de colapso de probabilidades no qual ao longo das iterações, muitas partículas adquirem pesos muito baixos e poucas assumem peso não desprezível. A ocorrência deste fato leva a um mal-condicionamento da representação por partículas da densidade de probabilidade de Xk . Para evitar este problema, quando se detecta que o número efetivo de partículas que representa a função de densidade de probabilidade é muito baixo, utiliza-se um procedimento de reamostragem de partículas, que pode ser resumido como segue. Cada partícula é clonada um número de vezes proporcional ao seu peso. Como o número total de partículas deve permanecer igual a N , resulta que as patículas com peso muito baixo não terão clones, sendo assim abandonadas. Após o procedimento de clonagem, os pesos das partículas sobreviventes são reajustados, assumindo o valor 1/N . Este procedimento é formalmente descrito em (Ristic et al., 2004). Finalmente, é possível sintetizar o algoritmo proposto para filtragem por partículas de sistemas maxplus da seguinte forma: 1391 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil 1. k=0; 2. Inicializar N partículas, X0i , i = 1, . . . , N ; 3. Para cada k: Ler a medida zk ; i Atualizar os pesos de Xk−1 (eq. 13); Se necessário, reamostrar; Gerar as partículas para k (eq. 4); Estimar xk (eq. 14); 4. Fim Na próxima seção um exemplo permite avaliar o desempenho do algoritmo de filtragem proposto. 4 Resultados Consideremos o sistema descrito pela matriz A abaixo, proposto em (Loreto et al., 2010). Supõe-se que as entradas sejam nulas (sistema autônomo) e que os estados de número 3, 6 e 8 sejam diretamente observados. Os elementos (2, 1), (5, 2), e (5, 4) da matriz A são variáveis aleatórias uniformemente distribuídas segundo os valores entre colchetes. Os outros valores são determinísticos. ε ε 4 ε ε ε 2 ε ε [1, 7] ε ε ε ε ε ε 3 ε ε 5 ε ε ε ε ε ε 1 4 ε ε ε ε 3 ε ε ε [3, 5] ε [1, 3] ε ε ε ε ε A= ε ε ε 5 ε 4 ε ε ε ε ε ε ε 4 ε ε ε ε 3 ε ε ε ε 3 ε 5 ε ε ε ε ε ε ε 2 ε ε ε A este sistema foi aplicado o filtro de partículas descrito anteriormente e comparado com o observador de estado proposto em (Hardouin et al., 2010), caracterizado por determinar um limite inferior para cada variável de estado. As figuras 2 e 3 e as tabelas comparativas dos erros médio e máximo para cada estado são apresentadas a seguir. Figura 2: Trajetória da transição 2 ISSN: 2175-8905 - Vol. X Figura 3: Trajetória da transição 5 Erro Médio Est. Filt. Obs. x1 0,00 0,00 x2 1,19 2,61 x3 0,00 0,00 x4 0,00 0,00 x5 0,58 3,17 x6 0,00 0,00 x7 0,00 0,00 x8 0,00 0,00 x9 0,00 0,00 Erro Máximo Est. Filt. Obs. x1 0,00 0,00 x2 2,44 5,85 x3 0,00 0,00 x4 0,00 0,00 x5 1,25 5,66 x6 0,00 0,00 x7 0,00 0,00 x8 0,00 0,00 x9 0,00 0,00 Observa-se que, exceto os estados 2 e 5, todos os outros são observados e filtrados com precisão. As figuras mostram que nos trechos selecionados as estimativas produzidos pelo filtro de partículas são em geral mais próximas do estado real que o seu limiar inferior. Este fato é confirmado pelas estimativas de erro dos dois algoritmos mostradas nas tabelas. 5 Conclusão Neste trabalho desenvolveu-se um algoritmo de filtragem estocástica para sistemas max-plus lineares baseado na técnica conhecida como filtro de partículas. Mostrou-se uma maneira simples de realizar a amostragem por importância, baseada na geração de previsões a partir de partículas do estado no valor precedente de contagem. Mostrou-se também como atualizar os pesos das partículas a partir da obtenção de uma nova medida, utilizando unicamente a função de verossimilhança obtida a partir da probabilidade da medida condicionada ao estado. Uma expressão para esta função de verossimilhança foi deduzida para o caso max-plus linear em que as perturbações estocásticas estão associadas aos elementos das matrizes A e B do modelo dinâmico do sistema, sendo variáveis aleatórias uniformemente distribuídas. Os resultados apresentados mostram que as técnicas de filtragem de partículas aplicadas a sistemas max-plus lineares, embora envolvendo uma escolha sub-ótima da densidade de 1392 X SBAI – Simpósio Brasileiro de Automação Inteligente 18 a 21 de setembro de 2011 São João del-Rei - MG - Brasil importância, levam a estimativas próximas aos valores reais do estado do sistema. Estudos estão em curso visando a utilização da amostragem ótima, que tem como contrapartida maior complexidade tanto na fase de previsão como na fase de atualização. Agradecimentos Este trabalho é parte das atividades do projeto CAPES/COFECUB 642/09 e contou com o financiamento do CNPq através do projeto PIBIC (Programa Institucional de Bolsas de Iniciação Científica - Unicamp) Referências Baccelli, F., Cohen, G., Olsder, G. and Quadrat, J. (1992). Synchronization and Linearity: An Algebra for Discrete Event Systems, John Wiley and Sons, New York. Bar-Shalom, Y., Li, X. and Kirubarajan, T. (2001). Estimation with Applications to Tracking and Navigation, Artech House, Norwood. Brown, R. and Hwang, P. (1997). Introduction to Random Signals and Applied Kalman Filtering, John Wiley and Sons, New York. Cassandras, C. G. and Lafortune, S. (1999). Introduction to Discrete Event Systems, Kluwer Academic Publishers. Doucet, A., G. S. and Andrieu, C. (2000). On sequential monte-carlo sampling methods for bayesian filtering, Statistics and Computing 10: 197–208. Hardouin, L., C.A.Maia, Cottenceau, B. and Lhommeau, M. (2010). Observer design for (max,+) linear systems, IEEE Trans. on Automatic Control 55-2: 538–543. Loreto, M. D., Gaubert, S., Katz, R. D. and Loiseau, J. (2010). Duality between invariant spaces for max-plus linear discrete event systems, SIAM J. on Control and Optimaztion 48-8: 5606–5628. Maia, C., Santos-Mendes, R., Luders, R. and Hardouin, L. (2005). Estratégias de controle por modelo de referência de sistemas a eventos discretos max-plus lineares, SBA 16(3): 263–278. Murata, T. (1989). Petri nets : properties, analysis and applications., Proceedings of the IEEE 77(4): 541–580. Ristic, B., Arulampalam, S. and Gordon, N. (2004). Beyond the Kalman Filter - Particle Filters for Tracking Applications, Artech House. ISSN: 2175-8905 - Vol. X Apêndice: Cálculo da função de verossimilhança Consideremos a equação max-plus z = A00 ⊗ x ⊕ B ⊗ u, sendo x ∈ Rn×1 , z ∈ Rq×1 , u ∈ Rp×1 , A00 ∈ Rq×n e B ∈ Rq×p . Definindo η T = [xT | uT ], e H = [A00 | B], tem-se z = H ⊗ η, sendo η ∈ Rr×1 , H ∈ Rq×r e r = n + p. Supõe-se que os elementos da matriz H, notados por hij , sejam variáveis aleatórias independentes e uniformemente distribuídas entre hij e hij , sendo suas funções de probabilidade acumulada e de densidade de probabilidade respectivamente dadas por: 0 se τ ≤ hij τ −hij se hij < τ ≤ hij Fij (τ ) = hij −hij 1 se τ > hij 1 se hij < τ ≤ hij hij −hij pij (τ ) = 0 se τ ≤ hij ou τ > hij Determina-se a seguir a densidade de probabilidade da variável aleatória z, condicionada pelo vetor η, isto é, pz (t|η), sendo t = [t1 . . . tq ]T ∈ Rq×1 . Em razão da independência dos elementos de H tem-se que: P [z ≤ t] = P [z1 ≤ t1 e . . . e zq ≤ tq ] = q Y P [zi ≤ ti ] i=1 Porém: P [zi ≤ ti ] = P [max(hij + ηj ) ≤ ti ] j = P [hi1 ≤ ti − η1 e . . . e hir ≤ ti − ηr ] r Y Fij (ti − ηj ) = j=1 Portanto a função de probabilidade acumulada conjunta do vetor z, condicionada por η, é dada por: Fz (t|η) = q Y r Y Fij (ti − ηj ) i=1 j=1 Derivando-se sucessivamente em relação a t1 . . . tq obtém-se a densidade de probabilidade procurada: pz (t|η) = = q r Y ∂ Y ( Fij (ti − ηj )) ∂ti j=1 i=1 q X r r Y Y ∂ ( (Fij (ti − ηj )) Fik (ti − ηk )) ∂ti i=1 j=1 k6=j q X r r Y Y = ( pij (ti − ηj ) Fik (ti − ηk )) i=1 j=1 k6=j Se o vetor z for conhecido, a função acima é chamada de função de verossimilhança de η. Neste caso, substituindo-se t pelo valor conhecido de z, obtém-se: q X r r Y Y V (η, z) = ( pij (zi − ηj ) Fik (zi − ηk )) i=1 j=1 k6=j (15) 1393
Download