MINISTÉRIO DA CIÊNCIA E TECNOLOGIA
INSTITUTO NACIONAL DE PESQUISAS ESPACIAIS
INPE-7503-TDI/718
QUALIDADE GEOMÉTRICA DE IMAGENS JERS-1 (SAR) E
RADARSAT (MODOS S2 E S3) EM AMBIENTE DE FLORESTA
TROPICAL (RONDÔNIA)
Nilo Sergio de Oliveira Andrade
Dissertação de Mestrado em Sensoriamento Remoto, orientada pelo Dr. Diogenes Salas
Alves, aprovada em 13 de outubro de 1999.
INPE
São José dos Campos
2000
528.711.7
ANDRADE, N. S. O.
Qualidade geométrica de imagens JERS-1 (SAR) e
RADARSAT (modos S2 e S3) em ambiente de floresta tropical (Rondônia) / N. S. O. Andrade. – São José dos Campos:
INPE, 1999.
203p. – (INPE-7503-TDI/718).
1.Radar de abertura sintética (SAR). 2.Ortorretificação.
3.Retificação. 4.Imageamento por radar. 5.Precisão geodésica. 6.Precisão geométrica. 7.Correção geométrica. 8.Medidas
em imagens de radar. 9.RADARSAT. I. Título
Aprovado pela Banca Examinadora em
cumprimento a requisito exigido para a
obtenção do Título de Mestre em
Sensoriamento Remoto.
Candidato: Nilo Sergio de Oliveira Andrade
São José dos Campos, 13 de outubro de 1999.
A minha esposa, Veruska, pelo apoio e
dedicação, e às minhas filhas Bianca e Beatriz
pela compreenção e carinho, dedico este
trabalho.
AGRADECIMENTOS
Ao Instituto Nacional de Pesquisas Espaciais pelo apoio de infra-estrutura
fornecido durante a realização deste trabalho;
Aos membros da banca examinadora pela predisposição em analisar este
trabalho e pelas sugestões recebidas.
Ao Instituto de Estudos Avançados pela oportunidade de executar este
trabalho;
Ao Dr. Diógenes S. Alves pela orientação, apoio, estímulo e,
principalmente, amizade e companheirismo;
Aos professores do Curso de Mestrado pelos conhecimentos transmitidos;
Ao Prof. Júlio Cesar Lima d’Alge pelo auxílio prestado na revisão do texto,
orientação e sugestões apresentadas;
A todos aqueles que, de alguma forma, contribuíram para a realização deste
trabalho.
Ao programa ADRO, através da proposta 364 do INPE – “Development of
RADARSAT Applications in Brazilian Amazon”), pelo fornecimento das imagens de
radar da Radarsat.
Ao programa Global Rain Forest Mapping Project “GRFM” pelo
fornecimento das imagens de radar Jers-1.
À Fapesp (Projeto 95/2432-5) e Finep (0816/95) Contrato 6.6.96.04+4.00)
pelo apoio financeiro.
RESUMO
As imagens de radares de abertura sintética apresentam distorções
geométricas que são causadas por diversas fontes. Este trabalho tem como objetivo
quantificar a qualidade geométrica de imagens dos satélites RADARSAT, tipo path
image, no modo standard de imageamento, com posições de feixe S2 e S3 e JERS-1,
com nível de processamento 2.1, adquiridas na região de Ariquemes – RO. Um
conjunto de pontos de controle, coletados com o uso de GPS foram adquiridos na área
de estudo e processados diferencialmente, a fim de serem utilizados na avaliação da
qualidade geométrica das imagens SAR. Os erros planimétricos e altimétricos destes
pontos foram da ordem de 1,11 metros e 2,19 metros, respectivamente. Os pontos foram
utilizados para avaliação das características geométricas das imagens, pela análise das
distâncias lineares e ângulos formados pelos mesmos. As imagens não corrigidas
geometricamente apresentaram erros relativos de escala e rotação da ordem de 2 pixels.
As mesmas imagens depois de geometricamente corrigidas (geocodificadas e ortoretificadas) apresentaram redução dos erros relativos de escala e rotação da ordem de
1/3 do pixel (4,17 metros). A Qualidade Geométrica Absoluta das imagens foi avaliada
pela sobreposição e análise visual de feições lineares adquiridas com GPS (estradas),
sobre as imagens corrigidas. Um conjunto de pontos de teste foi utilizado para avaliar a
exatidão absoluta e relativa das imagens de radar que sofreram correção geométrica
através do processo de geocodificação e orto-retificação. Os resultados obtidos com o
cálculo da exatidão absoluta e relativa destas imagens ratificam os resultados obtidos a
partir da avaliação da qualidade geométrica das mesmas, visto que os resultados são
bastantes similares. A partir do cálculo da exatidão absoluta das imagens geocodificadas
e orto-retificadas conclui-se que os erros de localização absoluta são menores do que
um pixel, variando de 5,42 metros a 12,24 metros para as imagens geocodificadas e de
5,62 metros a 11,72 metros para as imagens orto-retificadas. As imagens com as
características das utilizadas neste estudo, ou seja, ângulos de incidência variando de
24º a 31º (RADARSAT S2), 30º a 37º (RADARSAT S3) e 32º a 38º (JERS-1),
adquiridas em regiões com moderada variação altimétrica (a área de estudo apresenta
variações de 100 a 376 metros), apresentaram erros geométricos compatíveis com os
erros aceitáveis para a confecção de cartas-imagem nas escalas de 1:40.000, 1:25.000 ou
1:20.000, dependendo da classe da carta a ser produzida.
GEOMETRIC QUALITY OF JERS-1 (SAR) AND RADARSAT (BEAM
POSITIONS S2 AND S3) IMAGES IN TROPICAL FOREST ENVIRONMENT
(RONDÔNIA)
ABSTRACT
Synthetic aperture radar images reveal geometric distortions, which are
caused by different sources. The aim of this dissertation is to quantify the geometric
quality of some of these images – SGF product type (path image), standard beam mode,
beam positions S2 and S3 Radarsat images, and JERS-1 images level 2.1, acquired in
the region of Ariquemes - RO. A set of control points were acquired by using a GPS
receiver in the area of study and differentially corrected. The planimetric and altimetric
errors of these points are about 1,11 and 2,19 meters, respectively. These points were
used as ground truth and compared with geometric properties (linear distances and
angles) measured over the images. The uncorrected images presented relative scale and
rotation errors of about 2 pixels. The images were geometrically corrected (geocoded
and ortho-rectified) and had their geometric characteristics analyzed. The reduction of
the relative scale and rotation errors obtained with the processes of geometric correction
of the images were of 1/3 of pixel (4,17 meters). Visual inspection of an overlay of the
SAR images and a GPS collected road network indicated a reasonable degree of
coincidence. A set of testing points was used to evaluate the absolute and relative
accuracies of the images after geometric correction by geocoding and orthorectification. Results obtained with the calculation of the absolute accuracy of the
geocoded and ortho-rectified images showed errors of absolute localization smaller than
a pixel, varying from 5,42 meters to 12,24 meters to geocoded images and from 5,62
meters to 11,72 meters to the ortho-rectified ones. The images with viewing angles
ranging from 24º in the near range to 31º in the far range (RADARSAT S2), 30º in the
near range to 37º in the far range (RADARSAT S3) and 32º in the near range to 38º in
the far range (JERS-1), acquired in regions with moderate altimetric variation (the area
of study presents altimetric variations from 100 to 376 meters), presented geometric
errors acceptable for mapping at 1:40.000, 1:25.000 or 1:20.000 scales depending on the
class of the mapping product to be obtained.
SUMÁRIO
Pag.
LISTA DE FIGURAS
LISTA DE TABELAS
LISTA DE SÍMBOLOS
CAPÍTULO 1 – INTRODUÇÃO......................................................................................... 27
1.1 – Sensoriamento Remoto moderno e os radares de abertura sintética................................. 27
1.2 – Objetivos....................................................................................................................... 28
1.3 – Justificativa ................................................................................................................... 29
1.4 – Estruturação do Trabalho............................................................................................... 31
CAPÍTULO 2 – CONCEITOS DE IMAGEAMENTO POR RADAR ............................... 33
2.1 – Princípios Básicos do Radar .......................................................................................... 33
2.2 – Características da Radiação Eletromagnética na Faixa das Microondas .......................... 34
2.3 – Radar Aerotransportado de Visada Lateral (SLAR)........................................................ 38
2.3.1 – Radar de Abertura Real (RAR) ................................................................................... 39
2.3.2 – Resolução Espacial no RAR ....................................................................................... 40
2.3.3 – Radar de Abertura Sintética (SAR) ............................................................................. 45
2.3.4 – Resolução Espacial no SAR........................................................................................ 45
2.4 – Características das Imagens de Radar ............................................................................ 50
2.4.1 – Speckle....................................................................................................................... 52
2.4.2 – Processamento multivisada ......................................................................................... 53
2.4.3 – Formatos das imagens SAR ........................................................................................ 53
2.4.4 – Efeitos Relacionados à Geometria............................................................................... 54
2.4.4.1 – Linha de Visada....................................................................................................... 54
2.4.4.2 – Distorção de escala em imagens slant-range ............................................................ 55
Pag.
2.4.4.3 – Sombreamento (Shadowing) .................................................................................... 57
2.4.4.4 – Encurtamento (Foreshortening) ............................................................................... 60
2.4.4.5 – Inversão (Layover)................................................................................................... 61
2.4.5 – Efeitos de Movimento................................................................................................. 62
2.4.5.1 – Variação de Velocidade ........................................................................................... 63
2.4.5.2 – Desvio Lateral ou Vertical ....................................................................................... 63
2.4.5.3 – Guinada da Plataforma (Yaw)................................................................................... 63
2.4.5.4 – Arfagem da Plataforma (Pitch)................................................................................. 63
2.4.5.5 – Rolamento da Plataforma (Roll) ............................................................................... 64
CAPÍTULO 3 – SISTEMAS DE RADAR ESTUDADOS................................................... 65
3.1 – SAR/JERS-1 ................................................................................................................. 65
3.1.1 – A plataforma............................................................................................................... 65
3.1.2 – O sensor ..................................................................................................................... 66
3.1.3 – Aspectos geométricos dos produtos JERS-1................................................................ 67
3.2 – RADARSAT ................................................................................................................. 68
3.2.1 – Modos de Operação ou Imageamento.......................................................................... 75
3.2.2 – Níveis de processamento............................................................................................. 78
3.2.3 – Aspectos geométricos dos produtos RADARSAT ....................................................... 80
3.2.4 - Escala dos produtos RADARSAT ............................................................................... 82
3.2.5 – Termos relativos aos produtos RADARSAT ............................................................... 83
CAPÍTULO 4 – GEOCODIFICAÇÃO DE IMAGENS ..................................................... 87
4.1 – Uso de polinômios de mapeamento para correção geométrica de imagens ...................... 88
4.1.1 – Polinômios de mapeamento e pontos de controle......................................................... 90
4.1.2 – Reamostragem e interpolação ..................................................................................... 91
4.1.3 – Escolha dos pontos de controle ................................................................................... 93
4.2 – Registro de imagens SAR .............................................................................................. 95
Pag.
CAPÍTULO 5 – ORTO-RETIFICAÇÃO DE IMAGENS .................................................. 97
5.1 – Modelos de Grade.........................................................................................................104
5.1.1 – Grades Regulares Retangulares..................................................................................105
5.1.2 – Grades Irregulares Triangulares .................................................................................109
CAPÍTULO 6 – MATERIAIS E MÉTODOS ....................................................................111
6.1 – Materiais ......................................................................................................................111
6.2 – Área de estudo..............................................................................................................112
6.2.1 – Características da área de estudo ................................................................................113
6.3 – Organização do trabalho ...............................................................................................115
6.4 – Trabalho de campo .......................................................................................................116
6.5 – Metodologia .................................................................................................................118
6.5.1 – Processamento dos dados de campo ...........................................................................118
6.5.2 – Processamento das Imagens de Radar ........................................................................119
6.5.3 – Avaliação da Qualidade Geométrica das Imagens de Radar adquiridas .......................120
6.5.4 – Geocodificação das Imagens de Radar .......................................................................122
6.5.4.1 – Avaliação da Qualidade Geométrica das Imagens de Radar Geocodificadas ............125
6.5.4.2 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Geocodificadas......126
6.5.5 – Orto-retificação das Imagens de Radar.......................................................................130
6.5.5.1 – Avaliação da Qualidade Geométrica das Imagens de Radar Orto-retificadas............134
6.5.5.2 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Orto-retificadas .....135
CAPÍTULO 7 – RESULTADOS E DISCUSSÃO ..............................................................137
7.1 – Avaliação dos erros relativos aos pontos de controle .....................................................137
7.2 – Avaliação da Qualidade Geométrica das Imagens de Radar Jers-1 e Radarsat................138
7.2.1 – Análise linear das Imagens de Radar Jers-1 e Radarsat...............................................138
7.2.2 – Análise angular das Imagens de Radar adquiridas ......................................................142
7.3 – Geocodificação das Imagens de Radar ..........................................................................144
Pag.
7.4 – Avaliação da Qualidade Geométrica das Imagens de Radar Geocodificadas ..................144
7.4.1 – Análise Linear das Imagens de Radar Geocodificadas ................................................144
7.4.1.1 – Avaliação das Imagens de Radar Geocodificadas quanto à escala de aplicação ........147
7.4.1.2 – Avaliação da Qualidade Geométrica Absoluta das Imagens de Radar Geocodificadas ...148
7.4.2 – Análise Angular das Imagens de Radar Geocodificadas .............................................156
7.5 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Geocodificadas ...........158
7.6 – Orto-retificação das Imagens de Radar..........................................................................161
7.7 – Avaliação da Qualidade Geométrica das Imagens de Radar Orto-retificadas..................162
7.7.1 – Análise Linear das Imagens de Radar Orto-retificadas ...............................................162
7.7.1.1 – Avaliação da Qualidade Geométrica Absoluta das Imagens de Radar Orto-retificadas ...165
7.7.2 – Análise Angular das Imagens de Radar Orto-retificadas .............................................171
7.8 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Orto-retificadas ...........173
7.9 – Cálculo da Precisão do Modelo Digital de Elevação......................................................177
CAPÍTULO 8 – CONCLUSÕES E RECOMENDAÇÕES................................................181
REFERÊNCIAS BIBLIOGRÁFICAS ...............................................................................185
APÊNDICE A – TABELAS DETALHADAS DOS MODOS DE OPERAÇÃO DO
RADARSAT ............................................................................................189
APÊNDICE B – CARACTERÍSTICAS DAS IMAGENS RADARSAT UTILIZADAS ..197
APÊNDICE C – CARACTERÍSTICAS DAS IMAGENS JERS-1 UTILIZADAS...........201
APÊNDICE D – DILUIÇÃO DE PRECISÃO DOS DADOS DO GPS .............................203
GLOSSÁRIO.......................................................................................................................205
LISTA DE FIGURAS
Pag.
2.1 – Elementos básicos de um sistema de radar. .................................................................... 33
2.2 – Efeito de nuvens na transmissão das microondas do espaço para a superfície ................. 34
2.3 – Efeito da chuva na transmissão das microondas do espaço para a superfície. .................. 35
2.4 – Penetração dos sinais de radar na vegetação, em função da umidade e do ângulo de
incidência...................................................................................................................... 36
2.5 – Penetração dos sinais de radar no solo, em função do conteúdo volumétrico de água, da
freqüência e do tipo de solo. .......................................................................................... 37
2.6 – Espectro de microondas. ................................................................................................ 37
2.7 – Classificação dos sensores de microondas...................................................................... 39
2.8 – Ilustração do imageamento por radar com visada lateral................................................. 40
2.9 – A ambigüidade no imageamento por radar com visada vertical....................................... 41
2.10 – O imageamento com visada lateral e suas dimensões básicas........................................ 41
2.11 – Parâmetros de resolução da imagem de radar. .............................................................. 42
2.12 – Exemplo de resolução RAR com os seguintes parâmetros: h = 7.5 km, τ= 100 ns e
βh = 3 mrad (0.17º). .................................................................................................... 44
2.13 – Concepção de uma antena sintética de radar................................................................. 46
2.14 – Geometria típica de um sistema SLAR......................................................................... 51
2.15 – Efeito da linha de visada no sombreamento do radar. ................................................... 55
2.16 – Imagem em formato ground-range versus slant-range. ................................................ 55
2.17 – Sombreamento (shadowing)......................................................................................... 57
2.18 – Resoluções no solo e declive do terreno. ...................................................................... 58
2.19 – Encurtamento (foreshortening). ................................................................................... 61
2.20 – Inversão (layover)........................................................................................................ 61
2.21 – Distorções causadas por efeitos de movimento da plataforma não compensados........... 64
3.1 – A plataforma do JERS-1. ............................................................................................... 66
3.2 – O satélite RADARSAT.................................................................................................. 69
Pag.
3.3 – Órbita Dawn-Dusk......................................................................................................... 70
3.4 – Cobertura típica disponível do RADARSAT usando a largura de faixa de 500 km: (a)
América do Norte, cobertura de um dia; (b) América do Norte, cobertura de três dias; e (c)
Amazônia, um exemplo de cobertura equatorial para três dias. Em todos os casos, os
dados de imagem disponíveis são mostrados em amarelo. .............................................. 72
3.5 – Modos de operação do RADARSAT SAR. .................................................................... 75
3.6 – Modos de operação do RADARSAT SAR. .................................................................... 76
3.7 – Processo de geração e processamento das imagens SAR. ............................................... 78
4.1 – Sistemas de coordenadas definidos para a imagem e o mapa, juntamente com a
especificação de pontos de controle no terreno............................................................... 89
4.2 – Uso de polinômios de mapeamento para localizar pontos na imagem, correspondentes às
posições da grade definida sobre o mapa........................................................................ 91
4.3 – Determinação dos valores de nível de cinza por a) vizinho mais próximo, b) interpolação
bilinear e c) interpolação por convolução cúbica. i, j, etc são valores discretos de u e v .
..................................................................................................................................... 93
4.4 – Ilustração de curvas de ajuste para reforçar o comportamento potencialmente pobre de funções
matemáticas de ordem mais elevadas, quando usadas como extrapoladoras. ........................ 94
6.6 – Etapas para orto-retificação de Imagens de Radar. ......................................................... 98
5.1 – Superfície e grade regular correspondente no espaço tridimensional XYZ. .....................105
5.2 – Exemplo de mapa de isolinhas com alguns pontos amostrados. .....................................107
5.3 – Superfície e grade irregular triangular correspondente...................................................109
6.1 – Localização da área de estudo.......................................................................................113
6.2 – Fluxograma das principais etapas do trabalho. ..............................................................115
6.3 – Etapas anteriores ao trabalho de campo.........................................................................116
6.4 – Imagem Landsat-TM com os pontos de GPS coletados em campo. Sistema de Projeção
UTM – Datum SAD-69. ..................................................................................................123
6.5 – Fatores que afetam o cálculo da exatidão absoluta das imagens de radar........................129
6.7 – Imagem em Nível de Cinza com as feições lineares e pontos sobrepostos......................132
Pag.
6.8 – Relacionamento entre o ângulo de incidência das imagens de radar (graus), a precisão do
modelo digital de elevação (metros) e o erro planimétrico das imagens de radar ortoretificadas.....................................................................................................................133
7.1 – Erro de posicionamento 3D dos GCP’s. ........................................................................137
7.2 – Erro de posicionamento Horizontal dos GCP’s. ............................................................138
7.3 – Erro associado à identificação de um ponto qualquer na imagem de radar. ....................140
7.4 – Erro geométrico relativo de escala (total) das imagens de radar não corrigidas e
geocodificadas..............................................................................................................146
7.5 – Parte da Imagem Jers-1 de 28/05 geocodificada e com as estradas sobrepostas. Projeção
UTM – Datum SAD-69. ..................................................................................................149
7.6 – Área de 5x5 Km da Jers-1 de 28/05 geocodificada e com estrada sobreposta.................149
7.7 – Área de 1x1 Km da Jers-1 de 28/05 sem (a) e com (b) estrada sobreposta......................150
7.8 – Parte da Imagem Jers-1 de 11/07 geocodificada e com as estradas sobrepostas. Projeção
UTM – Datum SAD-69. ..................................................................................................150
7.9 – Área de 5x5 Km da Jers-1 de 11/07 geocodificada e com estrada sobreposta.................151
7.10 – Área de 1x1 Km da Jers-1 de 11/07 sem (a) e com (b) estrada sobreposta....................151
7.11 – Parte da Imagem Radarsat de 19/08 geocodificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1996. ...........................................152
7.12 – Área de 5x5 Km da Radarsat de 19/08 geocodificada e com estrada sobreposta.
Copyright CSA 1996. .............................................................................................152
7.13 – Área de 1x1 Km da Radarsat de 19/08 sem (a) e com (b) estrada sobreposta. Copyright
CSA 1996. .................................................................................................................153
7.14 – Parte da Imagem Radarsat de 04/07 geocodificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1997. ...........................................153
7.15 – Área de 5x5 Km da Radarsat de 04/07 geocodificada e com estrada sobreposta.
Copyright CSA 1997. .............................................................................................154
7.16 – Área de 1x1 Km da Radarsat de 04/07 sem (a) e com (b) estrada sobreposta. Copyright
CSA 1997. .................................................................................................................154
7.17 – Parte da Imagem Radarsat de 07/09 geocodificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1997. ...........................................155
Pag.
7.18 – Área de 5x5 Km da Radarsat de 07/09 geocodificada e com estrada sobreposta.
Copyright CSA 1997. .............................................................................................155
7.19 – Área de 1x1 Km da Radarsat de 07/09 sem (a) e com (b) estrada sobreposta. Copyright
CSA 1997. .................................................................................................................156
7.20 – Erro geométrico relativo de rotação das imagens de radar não corrigidas e
geocodificadas............................................................................................................157
7.21 – Erro geométrico relativo de escala das imagens de radar avaliadas. .............................165
7.22 – Imagem Jers-1 de 28/05 orto-retificada e com as estradas sobrepostas. Projeção UTM –
Datum SAD-69............................................................................................................166
7.23 – Área de 5x5 Km da Jers-1 de 28/05 orto-retificada e com estrada sobreposta...............166
7.24 – Área de 1x1 Km da Jers-1 de 28/05 sem (a) e com (b) estrada sobreposta....................166
7.25 – Imagem Jers-1 de 11/07 orto-retificada e com as estradas sobrepostas. Projeção UTM –
Datum SAD-69............................................................................................................167
7.26 – Área de 5x5 Km da Jers-1 de 11/07 orto-retificada e com estrada sobreposta...............167
7.27 – Área de 1x1 Km da Jers-1 de 11/07 sem (a) e com (b) estrada sobreposta....................167
7.28 – Imagem Radarsat de 19/08 orto-retificada e com as estradas sobrepostas. Projeção UTM –
Datum SAD-69............................................................................................................168
7.29 – Área de 5x5 Km da Radarsat de 19/08 orto-retificada e com estrada sobreposta. .........168
7.30 – Área de 1x1 Km da Radarsat de 19/08 sem (a) e com (b) estrada sobreposta. ..............168
7.31 – Imagem Radarsat de 04/07 orto-retificada e com as estradas sobrepostas. Projeção UTM –
Datum SAD-69............................................................................................................169
7.32 – Área de 5x5 Km da Radarsat de 04/07 orto-retificada e com estrada sobreposta. .........169
7.33 – Área de 1x1 Km da Radarsat de 04/07 sem (a) e com (b) estrada sobreposta. ..............169
7.34 – Imagem Radarsat de 07/09 orto-retificada e com as estradas sobrepostas. Projeção UTM –
Datum SAD-69............................................................................................................170
7.35 – Área de 5x5 Km da Radarsat de 07/09 orto-retificada e com estrada sobreposta. .........170
7.36 – Área de 1x1 Km da Radarsat de 07/09 sem (a) e com (b) estrada sobreposta. ..............170
7.37 – Erro geométrico relativo de rotação das imagens de radar avaliadas. ...........................173
Pag.
7.38 – Relacionamento entre o ângulo de visada das imagens de radar (graus), a precisão do
modelo digital de elevação (metros) e o erro planimétrico das imagens de radar ortoretificadas...................................................................................................................177
7.39 – Erro Planimétrico inerente às imagens orto-retificadas, utilizando-se um modelo digital
de elevação com precisão altimétrica de 15 metros. ....................................................179
LISTA DE TABELAS
Pag.
2.1 – Designação de bandas e fraqüências .............................................................................. 38
3.1 – Principais características do JERS-1 .............................................................................. 66
3.2 – Principais características do SAR/JERS-1...................................................................... 67
3.3 – Nível de precisão geométrica das imagens JERS-1 (processamento dos dados) .............. 68
3.4 – Tempo de revisita do RADARSAT (dias) ...................................................................... 71
3.5 – Características do sensor RADARSAT SAR.................................................................. 73
3.6 – Características da plataforma ......................................................................................... 73
3.7 – Características da órbita................................................................................................ 73
3.8 – Características dos produtos RADARSAT .................................................................... 74
3.9 – Lista de produtos da RADARSAT ................................................................................. 74
3.10 – Características dos modos de imageamento.................................................................. 77
3.11 – Nível de precisão geométrica das imagens RADARSAT.............................................. 81
3.12 – Fatores de escala topográfica (TSF) para as diversas posições dos modos de
imageamento do RADARSAT..................................................................................... 82
6.1 – Número de pontos de controle por imagem ...................................................................121
6.2 – Pontos de controle adquiridos na imagem LANDSAT-TM............................................124
7.1 – Erro geométrico relativo de escala das imagens de radar não corrigidas geometricamente
.................................................................................................................................139
7.2 – Erro geométrico relativo de escala (TOTAL) das imagens de radar não corrigidas
geometricamente ..........................................................................................................141
7.3 – Erro geométrico relativo de rotação das imagens de radar não corrigidas geometricamente
.................................................................................................................................142
7.4 – Análise da variação angular em função do posicionamento dos pixels nas imagens de radar
.................................................................................................................................143
7.5 – Erros quadráticos médios residuais obtidos após a geocodificação das imagens de radar
.................................................................................................................................144
7.6 – Erro geométrico relativo de escala das imagens de radar geocodificadas .......................145
7.7 – Erro geométrico relativo de escala (TOTAL) das imagens de radar geocodificadas .......145
Pag.
7.8 – Redução do erro geométrico relativo de escala (TOTAL) das imagens de radar
geocodificadas em relação às imagens não corrigidas ...................................................146
7.9 – Erro geométrico relativo de rotação das imagens de radar geocodificadas .....................156
7.10 – Percentual de redução do erro geométrico relativo de rotação das imagens de radar
geocodificadas em relação às imagens não corrigidas .................................................157
7.11 – Exatidão absoluta das imagens de radar geocodificadas (Erro de Localização Absoluta)
..................................................................................................................................158
7.12 – Exatidão relativa das imagens de radar geocodificadas (Erro Relativo de Escala e de
Rotação).....................................................................................................................159
7.13 – Exatidão relativa das imagens de radar geocodificadas (Erro Relativo de Escala TOTAL)
..................................................................................................................................159
7.14 – Erros quadráticos médios residuais obtidos com a orto-retificação das imagens de radar
..................................................................................................................................161
7.15 – Percentual de redução do erro quadrático médio residual TOTAL (x,y) das imagens ortoretificadas em relação às imagens geocodificadas .......................................................161
7.16 – Erro geométrico relativo de escala das imagens de radar orto-retificadas .....................162
7.17 – Erro geométrico relativo de escala (TOTAL) das imagens de radar orto-retificadas .....163
7.18 – Redução do erro geométrico relativo de escala (TOTAL) das imagens de radar ortoretificadas em relação às imagens não corrigidas e geocodificadas ..............................164
7.19 – Percentual de redução do erro geométrico relativo de escala (TOTAL) entre as imagens
de radar não corrigidas, geocodificadas e orto-retificadas............................................164
7.20 – Erro geométrico relativo de rotação das imagens de radar orto-retificadas ...................171
7.21 – Redução do erro geométrico relativo de rotação das imagens de radar orto-retificadas em
relação às imagens não corrigidas e geocodificadas ....................................................172
7.22 – Percentual de redução do erro geométrico relativo de rotação entre as imagens de radar
não corrigidas, geocodificadas e orto-retificadas .........................................................172
7.23 – Exatidão absoluta das imagens de radar orto-retificadas (Erro de Localização Absoluta)
..................................................................................................................................173
7.24 – Exatidão absoluta das imagens de radar geocodificadas e orto-retificadas (Erro de
Localização Absoluta) ................................................................................................174
7.25 – Exatidão relativa das imagens de radar orto-retificadas (Erro Relativo de Escala e de
Rotação).....................................................................................................................175
Pag.
7.26 – Exatidão relativa das imagens de radar orto-retificadas (Erro Relativo de Escala TOTAL)
..................................................................................................................................175
7.27 – Exatidão relativa das imagens de radar geocodificadas e orto-retificadas (Erro Relativo
de Escala TOTAL) .....................................................................................................176
7.28 – Exatidão relativa das imagens de radar geocodificadas e orto-retificadas (Erro Relativo
de Rotação) ................................................................................................................177
7.29 – Precisão do Modelo Digital de Elevação .....................................................................178
7.30 – Comparação das valores obtidos para a precisão planimétrica das imagens de radar ortoretificadas, a partir de um modelo digital de elevação com precisão de 15 metros, com o
erro geométrico relativo de escala (TOTAL) das imagens orto-retificadas...................180
LISTA DE SÍMBOLOS
Latinos
a hs
- "Fator de estreitamento da abertura de iluminação" associado à antena sintetizada
a hr
- "Fator de estreitamento da abertura de iluminação" associado à antena real
Ba
- Largura da banda azimutal, kHz
B
- Largura de banda, KHz
c
- Velocidade da luz, 3x108 m/s
fp
- Taxa de repetição de pulso, (pulsos. s-1)
h
- Altura de vôo, m
L
- Comprimento da antena real, m
Lp
- Comprimento da antena sintetizada, m
nl
- Número de looks
rap
- Melhor resolução alcançável, m
ra
- Resolução em azimute, m
rLV
- Resolução na linha de visada, m
rt
- Resolução transversal, m
R
- Distância na linha de visada, m
R0
- Distância na linha de visada, considerando um alvo perpendicular à antena, m
Ri
- Distância exata entre o radar e o alvo pontual, m
Rt
- Distância na linha de visada para a antena de transmissão, m
Rr
- Distância na linha de visada para a antena de recepção, m
Tp
- Período de repetição do pulso, ns
Gregos
βh
- Largura horizontal do feixe do radar, mrad (ou graus)
βr
- Largura horizontal do feixe da antena de abertura real, mrad (ou graus)
βs
- Largura horizontal do feixe da antena de abertura sintética, mrad (ou graus)
βv
- Largura vertical do feixe do radar, mrad (ou graus)
β hr
- Largura horizontal do feixe do radar da antena física do SAR, mrad (ou graus)
β hs
- Largura horizontal do feixe do radar da antena sintetizada, mrad (ou graus)
∆ϕ r
- Mudança de fase associada à abertura real
∆ϕ s
- Mudança de fase associada à abertura sintética
∆t
- Diferença de tempo entre a emissão e a recepção do pulso de radar, ns
θ
- Ângulo de incidência, graus
λ
- Comprimento de onda, m
σ
- Seção transversal do radar, m2
σi
- Seção transversal do radar para um alvo pontual, m2
τ
- Duração do pulso de radar, ns
v
- Velocidade da plataforma, m/s
ϕ
- Ângulo de depressão, graus
ϕi
- Fase associada com o processo de espalhamento de um alvo pontual i
CAPÍTULO 1
INTRODUÇÃO
1.1 - Sensoriamento Remoto moderno e os radares de abertura sintética
"Sensoriamento Remoto (SR) é a ciência e a arte de obter informação acerca de um
objeto, área ou fenômeno, através da análise de dados adquiridos por um dispositivo que
não está em contato com o objeto, área ou fenômeno sob investigação" (Lillesand e
Kiefer, 1994). Também pode ser entendido como o conjunto de atividades que têm por
objetivo determinar propriedades de alvos pela detecção, registro e análise da radiação
eletromagnética por eles refletida e/ou emitida (Lillesand e Kiefer, 1994).
O SR moderno é o descendente natural da fotografia convencional, tendo surgido com a
evolução das técnicas que permitem detectar e registrar diversas formas de radiação
eletromagnética além da luz visível.
O primeiro processo de imageamento físico, a fotografia, estava bastante relacionado
com o tipo de visão humana. Duas câmaras, colhendo a mesma imagem de diferentes
posições podiam igualmente ser utilizadas para reconstituir a visão estereoscópica dos
olhos. Contudo, a fotografia oferecia a vantagem de permitir que medidas fossem
realizadas dentro da imagem, a fim de que se entendessem as propriedades geométricas
do objeto imageado.
O termo inicialmente utilizado para medidas em imagens fotográficas foi iconometria.
Este termo foi posteriormente substituído pelo termo mais específico fotogrametria
(Leberl, 1990b).
Desde o início da fotogrametria, mais e mais aplicações surgiram, as quais necessitavam
de medidas radiométricas e geométricas de imagens, as quais não eram mais geradas por
processo fotoquímico ou por comprimentos de onda visíveis, como por exemplo o
imageamento na faixa de microondas.
27
Sistemas de imageamento por radar têm estado entre os primeiros dispositivos não
fotográficos de Sensoriamento Remoto, mesmo antes do advento das imagens do
satélite Landsat e de outras imagens de SR (Leberl, 1990b).
O termo radargrametria foi inicialmente definido por Daniel Levine, em seu livro
Radargrammetry, publicado em 1960, como: "A ciência de obter-se medidas confiáveis
através do radar". Segundo Leberl (1990a) radargrametria é a tecnologia de obter
informação geométrica de objetos a partir de imagens de radar.
1.2 - Objetivos
Visto que as imagens de sensores orbitais, tais como do RADARSAT e JERS-1 são
amplamente utilizadas com fins científicos (análise quantitativa dos relacionamentos
espaciais, análise multiespectral digital, dentre outros), é imprescindível que os usuários
destas imagens tenham noção precisa da qualidade geométrica dos produtos com os
quais lidam no dia-a-dia.
Assim sendo, este trabalho tem como objetivos:
•
Quantificar a qualidade geométrica dos produtos RADARSAT e JERS-1, com as
seguintes características: Radarsat (Modo Standard, S2 e S3, Path Image) e
Jers-1 (nível de processamento – 2.1).
•
Avaliar a qualidade geométrica dos produtos RADARSAT e JERS-1, após a
geocodificação, assim como após a realização da orto-retificação.
•
Calcular a exatidão absoluta e relativa dos produtos RADARSAT e JERS-1 que
foram geocodificados e orto-retificados.
Entenda-se por qualidade geométrica a quantificação dos erros que caracterizam a
fidelidade geométrica interna de uma imagem de Radar de Abertura Sintética (SAR)
(qualidade geométrica relativa); e dos erros relacionados a algum sistema de
coordenadas (qualidade geométrica absoluta). Vide descrição detalhada no Capítulo 6.
28
Entenda-se por exatidão absoluta e exatidão relativa a acurácia de pontos selecionados
na imagem em estudo, quanto ao seu posicionamento absoluto (em relação a um sistema
de coordenadas) e relativo (em relação a um outro ponto), respectivamente. Vide
descrição detalhada no Capítulo 6.
Segundo Sá (1990) o termo posicionamento consiste em determinar posições de objetos
estáticos ou móveis através das coordenadas associadas a um referencial. O referencial
caracteriza o tipo de posicionamento, significando que as posições podem ser
determinadas:
•
Em relação a um sistema, usualmente definido através de três coordenadas,
convenientemente
orientado
POSICIONAMENTO ABSOLUTO,
em
relação
à
Terra,
constituindo
o
ou
Em relação a um ponto, considerado como a origem de um sistema de coordenadas
local, constituindo o POSICIONAMENTO RELATIVO.
1.3 - Justificativa
As imagens SAR são geradas utilizando-se as informações contidas no sinal eco, para a
direção radial (ou transversal à direção de vôo) e na freqüência Doppler, relativa ao
vetor velocidade da plataforma, para a direção em azimute (Toutin et al., 1992).
As imagens de radar assim obtidas freqüentemente apresentam distorções bastante
acentuadas, as quais prejudicam uma interpretação das mesmas, e são especialmente
prejudiciais a certos tipos de investigações quantitativas, ou seja, dificultam a análise
quantitativa dos relacionamentos espaciais e a análise multiespectral digital destas
imagens (Naraghi et al., 1983).
Esta característica das imagens de radar ocorre principalmente porque as variações do
terreno fazem com que os objetos possam ser apresentados em uma posição diferente
daquela que ocorre em uma visão natural (Naraghi et al., 1983). O pico de uma
montanha, por exemplo, pode ser apresentado em uma imagem de radar na mesma
posição que um ponto de elevação mais baixa que se encontra a uma mesma distância
29
radial (slant range) do sensor, mas que se encontra em uma posição diferente no plano
horizontal de projeção.
Em geral, o comportamento ímpar da geometria das imagens de radar pode limitar o uso
destes dados para análises científicas. Abordagens iniciais com relação à correção
geométrica têm lidado com as diversas distorções destas imagens, das quais algumas
foram facilmente removidas, como por exemplo as correções aproximadas da
compressão da imagem em linha de visada (slant-range), expandindo o tamanho útil
dos dados e permitindo a construção de mosaicos, tornando possível o estudo
coordenado de amplas regiões (Naraghi et al., 1983).
Modelos polinomiais das distorções geométricas conseguiram razoável exatidão na
correção de todos os efeitos, exceto daqueles devido aos componentes topográficos de
alta freqüência (os quais, dependendo da geometria de visada, podem ser de até 3 vezes
a variação topográfica local). Imagens processadas deste modo (através do registro com
mapas) têm, em áreas de baixo relevo, sido submetidas com sucesso a análises
multiespectrais (Naraghi et al., 1983).
Estas abordagens intensificaram de forma significativa a utilidade científica das
imagens de radar, corrigindo muitas das distorções sistemáticas, assim como alguns dos
efeitos induzidos pelo terreno. Entretanto, a remoção de distorções produzidas pelas
variações de elevações do terreno continua sendo um problema crítico.
A remoção das distorções relacionadas à elevação dos alvos requer uma fonte
independente de informação, através da utilização de um segundo ângulo de
imageamento, ou de informações topográficas da superfície (Kwok et al., 1987).
Na ausência de um segundo ângulo de imageamento, o elemento essencial para a
caracterização das distorções locais em imagens de radar é a disponibilidade de modelos
digitais de elevação (MDE), segundo Kwok et al. (1987).
Diversas técnicas para correção de imagens de radar utilizando Modelos Digitais de
Elevação aparecem na literatura Adam et al. (1997); Naraghi et al. (1983); Toutin et al.
30
(1992), as quais dependem do registro relativo da imagem de radar com uma imagem
simulada criada a partir de um MDE, utilizando-se uma geometria de imageamento
conhecida. Outros autores realizam a correção geométrica das imagens de radar, sem a
necessidade da geração de uma imagem simulada (Kwok et al., 1987).
Entretanto, são poucos os trabalhos que podem ser encontrados na literatura, voltados à
avaliação da qualidade geométrica das imagens de radar disponíveis. Cito como
exemplo os do Programa de Desenvolvimento de Aplicações e Oportunidades de
Pesquisa - ADRO, (Bélanger et al., 1998; Gonçalves e Dowman, 1998; Jean-Paul,
1998; Sylvander et al., 1998), existindo, porém a necessidade desta avaliação conforme
anteriormente citado.
1.4 – Estruturação do Trabalho
O trabalho foi estruturado em capítulos, de acordo com a seguinte seqüência:
No Capítulo 2, é feita uma revisão bibliográfica dos princípios básicos do imageamento
por radar, abordando os efeitos relacionados à geometria das imagens SAR.
No Capítulo 3, são abordados os sistemas de radar RADARSAT e JERS-1, disponíveis
no mercado e em uso para análises científicas, enfocando os aspectos relacionados com
a qualidade geométrica de cada um dos produtos fornecidos aos usuários, de acordo
com dados fornecidos pelos fabricantes dos sistemas.
Visto que a geocodificação das imagens de radar é um passo fundamental para a
correção de algumas das distorções presentes nestas imagens (como por exemplo
rotação, translação e escala), e para a posterior análise de sua qualidade geométrica, o
Capítulo 4 faz uma revisão bibliográfica sobre como realizar estas correções e define
alguns conceitos importantes para este estudo.
No Capítulo 5, são apresentados os principais aspectos relacionados à orto-retificação
de imagens SAR orbitais. Também são apresentados os conceitos relacionados a
Modelagem Numérica de Terreno, analisando-se os modelos de grade regular retangular
e grade irregular triangular, assim como as vantagens e desvantagens no uso destas
31
grades para a geração de modelos digitais de elevação, visto que o cálculo destes
modelos constitui um passo fundamental para a orto-retificação das imagens de radar.
No Capítulo 6, são apresentados os materiais e métodos que foram utilizados para a
consecução dos objetivos deste trabalho.
No Capítulo 7, é efetuada a análise dos principais resultados obtidos e, no Capítulo 8,
são enumeradas as conclusões e recomendações decorrentes desta análise.
O Apêndice “A” apresenta as especificações relativas a cada tipo de imagem fornecida
pela RADARSAT, em função do modo de operação.
Nos Apêndices “B” e “C” foram descritas as características das imagens RADARSAT
e JERS-1 utilizadas neste trabalho.
No Apêndice “D” são apresentados os gráficos de diluição da precisão dos dados
obtidos a partir do Sistema de Posicionamento Global (GPS), durante o período de
aquisição dos pontos de controle. Estes dados foram obtidos a partir do conhecimento
das efemérides de cada satélite da constelação de GPS.
Finalmente, é apresentado um glossário de termos relacionados aos assuntos tratados
neste trabalho, tais como, radar e GPS, dentre outros.
Uma vez que o entendimento do processo de imageamento SAR é imprescindível para
que se perceba a geometria destas imagens, o conhecimento detalhado deste processo
precede à medição detalhada ou manipulação da geometria das imagens SAR. Assim
sendo, para que possamos realizar uma análise da qualidade geométrica das imagens de
sensores orbitais, vamos inicialmente compreender o processo de formação destes
produtos, assim como os fatores que influenciam ou afetam a geometria dos mesmos.
32
CAPÍTULO 2
CONCEITOS DE IMAGEAMENTO POR RADAR
2.1 - Princípios Básicos do Radar
O radar é basicamente um sistema eletrônico para a detecção e localização de alvos. Seu
princípio de funcionamento baseia-se na comparação entre um sinal conhecido, que é
por ele enviado, e o eco dele decorrente (Ulaby et al. 1981a).
Sendo um sistema de sensoriamento remoto ativo, o radar possui sua própria fonte de
energia para obter uma imagem. De acordo com Ulaby et al. (1981a), o termo radar é
aplicável a qualquer sistema ativo de rádio com um transmissor capaz de iluminar uma
superfície ou objeto que, ao refletir ou espalhar o sinal de volta ao sistema, terá algumas
de suas propriedades medidas por um receptor.
Um radar clássico se baseia na transmissão e recepção de pulsos situados na faixa
centimétrica do espectro eletromagnético1, sendo os sinais de retorno analisados a fim
de se medir sua intensidade, atraso e fase. O princípio básico é simples: emissão,
recepção e correlação entre os sinais transmitido e recebido (normalmente utiliza-se
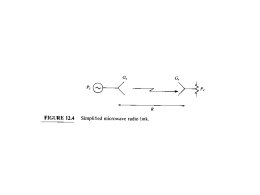
uma mesma antena para transmissão e recepção). A Figura 2.1 apresenta os elementos
essenciais de um sistema de radar.
Antena de
transmissão
Antena de
transmissão
e recepção
T
Chave
T-R
Indicador/processador
R
Antena de
recepção
Fig. 2.1 - Elementos básicos de um sistema de radar.
FONTE: adaptada de Ulaby et al. (1981a, p. 34).
1 - Para observação terrestre, os comprimentos de onda (λ) utilizados situam-se entre 0,3 cm e 100 cm.
33
2.2 - Características da Radiação Eletromagnética na Faixa das Microondas
De acordo com Ulaby et al. (1981a), em função do comprimento de onda (λ), a radiação
eletromagnética (REM) na faixa das microondas possui uma característica bastante
peculiar, que é o seu poder de penetração em determinados tipos de materiais, sob certas
condições.
Esta característica, entre outras, tornou o uso dos sensores que operam nesta faixa do
espectro muito atraente devido, particularmente, à sua capacidade de penetrar nuvens ou
até mesmo chuva. Tal capacidade de penetração também pode ser observada em
materiais que apresentam baixos valores de permissividade como, por exemplo, a areia
seca.
No entanto, a transparência atmosférica é certamente o maior atributo da REM nesta
faixa do espectro eletromagnético. A Figura 2.2 ilustra bem esta propriedade, ao mostrar
o efeito de nuvens na transmissão da REM entre o espaço e o solo.
Nuvens de gelo
100
T
r
a
n
s
m
i
s
s
i
v
i
d
a
d
e
(%)
90
Nuvens
Nuvensde
deágua
chuva
80
70
60
50
40
30
20
10
0
1
30
2
3
4
5
6
7 8
Comprimento de onda (cm)
10
5
Freqüência (GHz)
9
3
Fig. 2.2 - Efeito de nuvens na transmissão das microondas do espaço para a superfície
FONTE: adaptada de Ulaby et al. (1981a, p. 2).
34
Nuvens de gelo, que sejam densas o suficiente para obscurecer o solo, impossibilitando
o uso de sensores fotográficos, não têm quase nenhum efeito sobre as microondas. As
nuvens de chuva, por sua vez, têm um efeito significante somente para λ inferiores a
2 cm, sendo esse efeito realmente forte com λ inferior a 1 cm.
A chuva possui um efeito maior que aquele provocado pelas nuvens mas, como mostra
a Figura 2.3, esse efeito é desprezível para λ superiores a 4 cm, tornando-se
considerável apenas para λ menores que 2 cm.
100
T
r
a
n
s
m
i
s
s
i
v
i
d
a
d
e
(%)
90
80
70
60
50
40
30
20
10
0
1
30
2
3 4
5
6 7 8
Comprimento de onda (cm)
10
5
Freqüência (GHz)
9
3
Fig. 2.3 - Efeito da chuva na transmissão das microondas do espaço para a superfície.
FONTE: adaptada de Ulaby et al. (1981a, p. 3).
A penetração das microondas na vegetação é mais acentuada que a da radiação óptica.
Como se pode observar na Figura 2.4, os λ maiores têm maior poder de penetração do
que os λ menores. Desta forma, os λ menores possibilitam obter informações acerca das
camadas superiores da vegetação, enquanto os λ maiores permitem obter informações
das camadas inferiores e do solo.
35
Neste caso porém, não é somente o λ que influencia, mas também o grau de umidade
existente, a densidade da vegetação e o ângulo de incidência da REM. Estas relações
também são mantidas quando se trata de solo, sendo o grau de umidade, neste caso, de
extrema importância, como mostra o gráfico da Figura 2.5.
λ = 1 cm
λ=1m
Sinais de retorno
das folhas,
troncos e solo
Sinais de retorno das folhas
ALVOS ÚMIDOS
Sinais de retorno
do trigo e do solo
λ = 1 cm
ALVOS SECOS
Sinais de retorno
do trigo
Sinais de retorno
do solo e do subsolo
Sinais de retorno das
folhas e troncos
λ= 1 m
Sinais de retorno
do trigo e do solo
Fig. 2.4 - Penetração dos sinais de radar na vegetação, em função da umidade e do
ângulo de incidência.
FONTE: adaptada de Ulaby et al. (1981a, p. 4).
Uma outra motivação para o uso das microondas em sensoriamento remoto é que as
informações geradas pelos sensores de microondas são diferentes daquelas obtidas nas
regiões do visível e do infravermelho. Esta característica faz com que, caso as condições
sejam favoráveis, seja possível uma complementação entre os sensores que operam nas
diversas regiões do espectro.
Um exemplo deste sinergismo é citado em Ulaby et al. (1981a), quando comentam que
a informação obtida nas regiões do visível e infravermelho próximo é determinada
primariamente por ressonância molecular nas camadas de superfície do solo ou da
vegetação, enquanto a informação obtida na região das microondas resulta das
propriedades geométricas e dielétricas da superfície ou volume estudados.
36
Fig. 2.5 – Penetração dos sinais de radar no solo, em função do conteúdo volumétrico
de água, da freqüência e do tipo de solo.
FONTE: adaptada de Ulaby et al. (1981a, p.4).
Segundo Ulaby et al. (1981a) não há uma definição categórica sobre o espectro de
microondas. Há, todavia, uma convenção de que ele se estenda ao longo das bandas
designadas internacionalmente por UHF, SHF e EHF, desde 300 MHz até 300 GHz
(comprimentos de onda de 1 metro até 1 milímetro). Este espectro de microondas é
apresentado na Figura 2.6.
Fig. 2.6 – Espectro de microondas.
FONTE: adaptada de Ulaby et al.. (1981a, p. 19).
37
No início do desenvolvimento dos radares, foi criado um esquema de designação por
letras das bandas de radar, para ser utilizado como um código, por motivos estratégicos
militares. Entretanto, este esquema continuou a ser adotado nos tempos de paz,
provavelmente por hábito e pela necessidade de uma nomenclatura mais curta e
descomplicada.
As letras mais freqüentemente adotadas hoje em dia, para a designação das diversas
bandas de microondas, são apresentadas na tabela 2.1.
TABELA 2.1 - DESIGNAÇÃO DE BANDAS E FREQÜÊNCIAS
FREQ.
COMP. DE
(GHz)
ONDA (cm)
P
0,225 a 0,39
133 a 77
L
0,390 a 1,55
S
1,550 a 3,90
BANDA
FREQ.
COMP. DE
(GHz)
ONDA (cm)
C
3,90 a 5,75
7,0 a 5,20
77,0 a 19
X
5,75 a 10,9
19,0 a 7,0
K
10,9 a 36,0
BANDA
FREQ.
COMP. DE
(GHz)
ONDA (cm)
Q
36,0 a 46,0
0,83 a 0,65
5,20 a 2,75
V
46,0 a 56,0
0,65 a 0,54
2,75 a 0,83
W
56,0 a 100,0
0,54 a 0,30
BANDA
2.3 - Radar Aerotransportado de Visada Lateral (SLAR)
Os sensores de microondas aerotransportados são classificados em dois grandes grupos:
os sensores ativos e os passivos (Figura 2.7). Em cada caso, esses sensores podem ser
imageadores ou não imageadores, como por exemplo os escaterômetros e os altímetros.
Este trabalho será restrito aos imageadores ativos, doravante chamados de radar. A
definição de SLAR engloba dois tipos de radares imageadores:
Sistema de radar de abertura real. Comumente definido pela sigla SLAR, este
sistema é o mais simples e sua resolução em azimute é uma função da abertura azimutal
da antena e da distância entre o radar e o alvo (linha de visada). Por ter a sigla SLAR
um caráter geométrico e abrangente (engloba os dois tipos), optamos por adotar no
presente trabalho a sigla RAR (Real Aperture Radar), por ser esta mais correta em seu
38
conteúdo, muito embora, vale lembrar, a sigla SLAR seja freqüentemente adotada para
definir este tipo de radar, apesar de ser incorreto.
Sistema de radar de abertura sintética. Trata-se de um sistema que, através de
gravações e processamento dos sinais de retorno, cria uma antena virtual centenas de
vezes maior que seu tamanho físico. Possue uma boa resolução em azimute, a qual
independe da distância entre o radar e o alvo (de 1 a 2 metros para sistemas
aerotransportados e de 5 a 50 metros para sistemas orbitais). Também utiliza visada
lateral e a sigla usada para defini-lo é SAR (Synthetic Aperture Radar).
Imageadores
(SLAR)
Ativos
(radares)
NãoImageadores
Sensores de
Microondas
Aerotransportados
SAR
RAR
Escaterômetros
Altímetros
Imageadores
Passivos
(radiômetros)
NãoImageadores
Fig. 2.7 - Classificação dos sensores de microondas.
2.3.1 - Radar de Abertura Real (RAR)
Nos radares aerotransportados de visada lateral, a antena é disposta de forma a
direcionar seus pulsos perpendicularmente à linha de vôo. Devido às características da
antena do radar de abertura real, ou seja, de grande comprimento, esta produz um feixe
largo na vertical e estreito na horizontal, como ilustra a Figura 2.8.
39
A imagem é produzida com o movimento da aeronave em relação à área a ser imageada.
Um pulso curto é transmitido do radar, numa sequência de transmissões e recepções de
pulsos.
Quando o pulso incide sobre o alvo, uma parte do sinal retorna para o radar. O eco
devido a cada pulso transmitido é amostrado, digitalizado e gravado em uma memória,
fita ou outro meio físico de armazenamento de dados. A seqüência de sinais, que é
formada com o deslocamento da aeronave, forma a imagem de radar.
transmissor/receptor
antena
feixe de varredura
gravador
barranco
água
árvores
monitor
caminhão
sombra
início da
varredura caminhão
árvores
amplitude
de vídeo
barranco
fim da
varredura
sombra
água
tempo
(distância)
Vegetação rasteira, solo exposto, etc.
Fig. 2.8 - Ilustração do imageamento por radar com visada lateral.
2.3.2 - Resolução Espacial no RAR
No cálculo das resoluções dos sistemas de radar, a geometria de aquisição utilizada
constitui um fator preponderante. Enquanto sensores ópticos gravam uma faixa de
terreno fotograficamente , seja quadro a quadro, seja linha a linha , os radares
imageadores processam seus dados em função do tempo decorrido entre o sinal de ida e
o eco dele decorrente.
40
Esta condição, ilustrada na Figura 2.9, gera, para os radares imageadores com visada
vertical, um problema insolúvel de ambigüidade de distâncias e intervalos de tempo, ou
seja, dois alvos idênticos (t1 ou t2), situados à mesma distância do radar não seriam
separáveis na imagem, pois os sinais de retorno de ambos os alvos teriam o mesmo
intervalo de tempo.
t2
t
1
t0
t
1
t2
Fig. 2.9 - A ambigüidade no imageamento por radar com visada vertical.
Desta forma, a visada lateral , utilizada por alguns sistemas sensores ópticos mas, por
outros motivos que não ambiguidade , é empregada por radares imageadores para a
solução de tal problema (Figura 2.10). Assim, ecos provenientes de diferentes alvos na
superfície não têm suas posições confundidas em função da recepção simultânea dos
mesmos pelo sistema sensor.
Neste tipo de geometria, são definidas duas dimensões básicas e dois ângulos: linha de
visada (slant range), distância no solo (ground range), ângulo de depressão (ϕ) e ângulo
de incidência (θ ). Se a superfície for considerada plana teremos: ϕ + θ = 90º.
Fig. 2.10 - O imageamento com visada lateral e suas dimensões básicas.
41
A determinação da distância no solo é função da linha de visada (LV) e do ângulo de
depressão (ϕ), como se pode notar na Figura 2.10, onde se considera a terra plana. Já a
determinação do comprimento da linha de visada (LV), é feita a partir da diferença de
tempo entre a emissão e a recepção do pulso de radar (∆t), considerada a velocidade da
luz (c), como se segue:
LV =
c∆t
.
2
(2.1)
Para um radar de visada lateral define-se três tipos distintos de resolução:
cτ
),
2
•
resolução na linha de visada (slant range resolution –- rLV =
•
resolução transversal (cross-track ou ground range resolution –- rt =
•
resolução em azimute (along-track ou azimuth resolution –- ra = Rβ h ), onde β h
cτ
)e
2senθ
é a abertura do feixe horizontal da antena.
A Figura 2.11 mostra a geometria detalhada para a determinação dessas resoluções.
l
rLV = c τ
2
βh
R
βv
direção de vôo
θ
h
Direção do vôo
ra = R βh
rt =
cτ
2 sen θ
faixa de varredura
Fig. 2.11 - Parâmetros de resolução da imagem de radar.
FONTE: adaptada de Ulaby et al. (1981a, p. 46).
42
Num sistema de abertura real, a resolução está vinculada a dois parâmetros principais:
largura horizontal do feixe (βh) e duração do pulso (τ). A largura horizontal do feixe em
radianos é aproximadamente o valor da razão entre o comprimento de onda (λ) e o
comprimento da antena (L):
βh ≅
λ
L
(rad)
(2.2)
A resolução em azimute (ra) é igual ao arco correspondente a βh, na distância da linha
de visada (R) e é dada por:
ra = R β h .
(2.3)
Como R = h/cosθ (onde h é a altura de vôo), tem-se:
ra =
βhh
.
cos θ
(2.4)
Como se pode observar facilmente, quanto mais distante o sensor, maior será o arco
correspondente e, conseqüentemente, pior a resolução em azimute.
Conforme Ulaby et al. (1982c), para um pulso de duração τ, a resolução na linha de
visada é dada por:
rLV =
cτ
.
2
(2.5)
A resolução transversal (rt) é a porção do solo plano contida na célula de resolução, e é
dada por Ulaby et al. (1982c):
rt =
cτ
.
2 sen θ
(2.6)
Assim sendo, quanto mais curta for a duração do pulso, melhor será a resolução
transversal. A restrição na obtenção deste pulso, porém, está no fato de que, quanto mais
curto ele for, maior será a potência de pico exigida do sistema, para manter-se a mesma
potência média.
43
Verifica-se, de acordo com a Figura 2.11, que rt, sendo função do ângulo de incidência,
não terá o mesmo valor para diferentes linhas de visada.
Nota-se que as resoluções em azimute e transversal são função do ângulo de incidência
( θ) e, conseqüentemente, da linha de visada. Assim sendo, rt é degradada nas distâncias
menores, enquanto ra é degradada nas distâncias maiores.
Isto faz com que a forma da imagem seja alongada na direção transversal (cross-track)
para pequenas distâncias e na direção longitudinal (along-track) para longas distâncias.
Portanto, ao se especificar a resolução de um RAR, pode-se utilizar a largura do feixe e
a resolução na linha de visada para descrever o desempenho do sistema, ao invés de
determiná-la em termos de unidades lineares de comprimento.
Note-se, a partir das Equações 2.4 e 2.6, na Figura 2.12, que a célula de resolução de
menor área ra ⋅ rt ocorre sempre a 45º.
Resolução (m) ou θ (graus)
R
e
s
o
l
u
ç
ã
o
(m)
ou
80
ângulo de incidência (θ )
70
60
50
resolução em azimute ( ra )
40
30
20
θ 10
(graus)
0
0
resolução transversal (rt )
5
10
15
Distância no solo (Km)
20
25
Fig. 2.12 - Exemplo de resolução RAR com os seguintes parâmetros: h = 7.5 km,
τ= 100 ns e βh = 3 mrad (0.17º).
FONTE: adaptada de Ulaby et al. (1982c, p.572).
44
2.3.3 - Radar de Abertura Sintética (SAR)
Basicamente, a diferença entre SAR e RAR reside no método de processamento dos
dados brutos. No SAR, uma longa antena efetiva é utilizada; porém, ela é sintetizada
pelo processamento do sinal, ao invés da utilização de uma antena fisicamente longa.
O resultado obtido é, paralelamente à redução física da antena, a melhora na resolução
em azimute. Além disso, esta resolução é independente da distância, o que faz com que
o SAR possa ser utilizado tanto em aeronaves quanto em espaçonaves, sem que se
comprometa a resolução azimutal.
2.3.4 - Resolução Espacial no SAR
As resoluções no SAR, transversal e em azimute, são calculadas de formas distintas
daquelas utilizadas para o RAR.
Ainda que a resolução transversal do RAR se aplique em princípio ao SAR, ela não é
usualmente adotada. Isto porque os sistemas de abertura sintética utilizam, em geral,
pulsos de freqüência modulada (chirpped pulses), a fim de obter uma melhor resolução
transversal sem, entretanto, ter que recorrer a pulsos muito curtos.
Neste caso, temos a seguinte resolução transversal:
rt =
c
2B sen θ
(2.7)
onde,
B é a largura de banda do pulso modulado linearmente em freqüência e que pode ser tão
larga quanto necessária, sem que para isso seja requerida uma grande potência de pico,
quando a técnica de modulação de freqüência é utilizada.
O cálculo da resolução em azimute, por sua vez, é feito de uma forma bastante distinta
daquela vista para o RAR. Para determinar ra quantitativamente, Ulaby et al. (1982d)
fazem uso de duas abordagens: do ponto de vista do estreitamento do feixe por efeito
45
Doppler e do ponto de vista de uma rede de antenas, sendo esta última utilizada neste
trabalho para explicar o cálculo de ra.
A Figura 2.13 (a) mostra três posições diferentes da antena de um sistema de radar: A,
B e C. Na posição A, o feixe da antena começa sua varredura sobre o alvo (T). Na
posição B, a antena está no través deste alvo e na posição C, o feixe está prestes a
encerrar a varredura pelo alvo.
Desta forma, o comprimento máximo de uma rede discreta de antenas que podem
observar simultaneamente um alvo pontual, é dado por:
L p = β hr R0
(2.8)
onde βhr é a largura horizontal do feixe da antena real, o termo subscrito “r” é utilizado
para distinguir esta largura de feixe da largura do feixe da antena sintética.
Fig. 2.13 - Concepção de uma antena sintética de radar.
FONTE: adaptada de Ulaby et al. (1982d, p. 644).
46
No cálculo da largura do feixe da rede de antenas, deve-se levar em conta a mudança de
fase do sinal transmitido associada a um dado alvo, devido à trajetória de ida e volta
percorrida pelo pulso entre a antena e o alvo. A Figura 2.13 (b) é um diagrama
ilustrativo das variações de fase entre dois elementos numa rede discreta de antenas.
A largura do feixe é determinada pela mudança de fase relativa nas trajetórias entre o
alvo e os elementos na rede. Dois elementos adjacentes numa rede, separados por uma
distância ∆x, são mostrados com porções dos raios Ra e Rb saindo desses elementos em
direção ao alvo. Ra e Rb podem ser considerados paralelos entre si, já que os elementos
estão bastante próximos um do outro, dada a distância que os separa do alvo.
Assim sendo, a diferença em distância dos dois raios ao longo da rede é:
Ra − Rb = ∆x sen β.
(2.9)
Para a antena de abertura real a diferença de fase associada com esta distância é:
∆ϕ r = k( Ra − Rb ) = k ∆x sen β ,
(2.10)
onde,
k=
2π
.
λ
Para a rede, deve-se considerar tanto o caminho de ida da radiação, como o de volta,
para a variação de fase. Neste caso, temos:
∆ϕ s = 2 k( Ra − Rb ) = 2 k ∆x sen β.
(2.11)
Para uma rede discreta ideal de antenas de comprimento Lp, onde Lp é suficientemente
longo para se ter uma largura do feixe pequena, o valor da abertura β do feixe associado
com o primeiro zero (ou nulo) do diagrama de irradiação da rede é dado por Ulaby et al.
(1982d):
2kL p senβ ≅ 2kL p β = π .
(2.12)
Assim sendo, o valor de β associado ao primeiro nulo para a rede discreta de antenas é:
47
βs =
π
λ
=
2kL p 4 L p
(2.13)
Essa rede discreta, por ser sintetizada a partir de uma única antena de abertura angular
βhr recebe o nome de antena sintética.
A separação entre os elementos da rede sintética é dada por µ⋅Tp, onde µ é a velocidade
linear de deslocamento da antena e Tp é o período de repetição de pulsos transmitidos.
Para uma antena real de comprimento L, o valor de abertura β associado ao primeiro
nulo do seu diagrama de irradiação é dado por:
βr =
π
λ
=
kL 2 L
(2.14)
O fator 2 de diferença entre β da antena de abertura real e de abertura sintética deve-se
ao fato de que, na antena de abertura real considera-se a irradiação em um único
sentido, ao passo que na antena de abertura sintética considera-se a irradiação nos dois
sentidos (ida e volta).
Considerando que a rede sintética não é ideal e que tem um comprimento (Lpr < Lp), a
largura do feixe βhs para a antena sintética é dada por:
β hs =
λa hs
2 L pr
(2.15)
onde ahs é o fator de estreitamento da abertura de iluminação, (em inglês - aperture
illumination taper factor), associado à antena sintética. Caso a antena seja
uniformemente iluminada, então ahs = 0.88 (Ulaby et al., 1982d). Entretanto, a maioria
das antenas, reais ou sintéticas, não têm iluminação uniforme, tendo usualmente o valor
de ahs maior que 0.88. Normalmente, assume-se que este valor seja igual a 1, visando a
simplificação dos problemas. Porém, deve-se ter em mente que as antenas, reais e
sintéticas, têm um fator ah superior a 1 na maior parte das vezes.
48
Utilizando a Equação 2.15 para a largura do feixe da antena sintética, a resolução em
azimute é obtida como se segue:
ra = β hs R =
λRa hs
2 L pr
(2.16)
A melhor resolução possível (rap) para o SAR utilizando-se uma rede de comprimento
máxima (Lpr = Lp) é dada por:
rap =
λRahs
2L p
(2.17)
Consideremos a abertura real da antena que deu origem a rede de antenas sintética
como:
β hr =
a hr λ
L
(2.18)
onde ahr é o fator de estreitamento da abertura de iluminação para a antena real e L é o
seu comprimento. Logo:
L p = β hr .R =
a hr λ .R
L
(2.19)
Este valor de Lp pode ser substituído na Equação 2.17 para se obter a resolução em
termos de comprimento da antena real e do fator de estreitamento da abertura de
iluminação. Assim, temos:
a L
rap = hs ⋅
a hr 2
(2.20)
Considerando-se que os fatores de estreitamento da abertura de iluminação são
geralmente iguais tanto para a antena sintética quanto para a antena real, o resultado
usual fica sendo:
rap ≅
L
.
2
(2.21)
49
Assim, temos que a melhor resolução sintética é a metade do comprimento da antena
real. Ela é independente, ao mesmo tempo, da distância em relação ao alvo e do
comprimento de onda.
O motivo pelo qual ela é independente da distância está no fato de que o comprimento
da antena sintética Lp é diretamente proporcional à distância, ou seja, quanto maior a
distância, maior o arco da abertura.
O motivo pelo qual há independência em relação ao comprimento de onda λ é que
quanto maior o λ, maior o comprimento da antena sintética potencial, resultando em
uma mesma resolução, já que a largura do feixe sintética equivalente também se
mantém igual.
Para efeitos de comparação calcula-se a resolução em azimute de uma antena real:
rar = β hr R =
ahr λR
,
L
(2.22)
onde a resolução tem valores maiores quando se aumenta λ ou R.
A melhor resolução alcançável para um SAR, tendo uma antena fixada à aeronave ou
espaçonave voando em linha reta, é aquela apresentada na Equação 2.20. Embora a
melhor resolução possível seja obtida utilizando-se toda a abertura sintética disponível
(Lp), isso normalmente não é feito, devido, entre outros fatores, às pertubações na
trajetória da plataforma que transporta o sensor. Por isso, quando uma abertura menor é
utilizada, a resolução é aquela dada pela Equação 2.16.
2.4 - Características das Imagens de Radar
Para a interpretação de imagens de radar, algumas características do processo de
formação dessas imagens devem ser levadas em conta, assim como alguns conceitos.
Resolução do radar: É a mínima separação entre dois alvos, de igual refletividade no
terreno, que permitirá que estes apareçam individualmente na imagem de radar
processada. A resolução em sistemas de radar difere em duas direções: direção azimutal
50
ou ao longo da trajetória de vôo e direção transversal ou perpendicular à trajetória de
vôo.
Espaçamento entre pixels: É a distância no solo entre o centro de um pixel e o centro
do pixel vizinho, ou seja é a distância entre pixel adjacentes, e é medida em metros. Este
espaçamento pode ser diferente para as dimensões transversal e azimutal da imagem,
sendo dadas pelas seguintes equações:
Transversal: d r =
Azimutal: d a =
C .TS
2
(2.23)
v
prf
(2.24)
Onde,
TS é o tempo de amostragem do sinal eco recebido pelo sensor SAR, v é a velocidade
relativa entre o sensor e os refletores da cena e prf é a freqüência de repetição dos
pulsos transmitidos pelo sensor SAR.
A imagem de radar tem uma visada em perspectiva (Figura 2.14) e os sinais de retorno
são gravados em seqüência ao longo do tempo, produzindo a componente transversal
(cross-track) da imagem. A dimensão azimutal (along-track) é devida ao movimento da
plataforma na direção de vôo.
direção de vôo
dimensão
azimutal
feixe do radar
linha de
visada
linha
de vôo
distância no solo
dimensão transversal
Fig. 2.14 - Geometria típica de um sistema SLAR.
51
As imagens de um radar de abertura sintética são obtidas a partir de uma visada oblíqua
mas, quando corrigidas de slant range para ground range, apresentam-se como uma
imagem de visada vertical.
Entretanto, os efeitos topográficos de obliqüidade não são removidos, o que significa
dizer que limites de feições, como florestas por exemplo, e suas sombras continuarão a
existir como feições distorcidas, independentemente das correções geométricas.
Portanto, em áreas montanhosas, efeitos tais como encurtamento e inversão (vide
2.4.4.4 e 2.4.4.5) não podem ser removidos pelos meios usuais, como, por exemplo, a
geocodificação da imagem.
O comprimento de onda utilizado no sistema de radar é também um parâmetro
importante do imageador, pois afeta o resultado obtido na interpretação da imagem,
particularmente em aplicações relacionadas à vegetação. Geralmente, a penetração no
dossel será maior quanto maior for o comprimento de onda.
2.4.1 - Speckle
Para se extrair das imagens informações úteis relacionadas a alguns parâmetros
temáticos da superfície é importante o entendimento de aspectos do radar que dificultam
a análise da imagem, de tal forma que a influência temática seja claramente separada
das influências oriundas do mapeamento por radar.
Segundo Suits (1983) duas ondas são ditas coerentes entre si se há uma relação regular
ou sistemática entre suas amplitudes. Por outro lado, são ditas incoerentes (nãocoerentes) se suas amplitudes estão relacionadas de forma aleatória.
Radares e lasers normalmente utilizam ondas monocromáticas na iluminação de seus
alvos. As ondas refletidas por dois alvos próximos um do outro são altamente coerentes,
de tal forma que a interferência provocada pelas ondas refletidas faz com que a imagem
gerada por este tipo de sensor se caracterize algumas vezes pela ausência de sinal, ou
pela presença de até quatro vezes o sinal médio de um dos dois alvos (dependendo da
52
posição do sensor em relação aos alvos). Por esta razão, coerência das ondas, imagens
de radar têm, inerentemente, uma aparência granulada (speckle), (Suits, 1983).
O sinal médio recebido de uma dada direção não depende apenas da refletividade das
várias partes do alvo, mas também, para ondas coerentes, do arranjo destas partes em
relação ao sensor. Estes detalhes geralmente não são determináveis, mas podem ser
revelados através da análise do speckle da imagem (Suits, 1983).
2.4.2 - Processamento multivisada
O processamento multivisada, em inglês, “multi-look”, consiste em dividir a abertura
sintética em visadas (looks). A imagem final é composta pela média das imagens em
cada look, geradas separadamente.
Esta técnica aumenta a relação sinal-ruído da imagem final, diminuindo o efeito do
ruído speckle. O processamento multivisada provoca uma degradação na resolução em
azimute, uma vez que as imagens de cada look possuem um comprimento de antena
sintética Lpr menor do que o máximo comprimento Lp. Em termos de largura de faixa
pode-se também escrever:
ra =
nl.LP
nl.v
ou ra =
Ba
2
(2.25)
onde,
nl é igual ao número de looks, e Ba é a largura de freqüência da banda azimutal. A
resolução em azimute nesse caso torna-se nl vezes menor que a imagem de apenas um
look (Ulaby et al., 1982b).
2.4.3 - Formatos das imagens SAR
Normalmente, as imagens geradas em 1 look são fornecidas no formato complexo, para
que seja possível o conhecimento da fase de cada pixel da imagem. Nesta representação
cada pixel é um número complexo em ponto flutuante, que representa as componentes
real e imaginária de uma amostra do sinal eco (em fase e em quadratura de fase).
53
Normalmente um pixel é representado por 64 bits. A imagem de radar complexa será
representada por: I + iQ .
A imagem Amplitude é dada por:
A = I 2 +Q2
(2.26)
Estas também são conhecidas como imagens detectadas linearmente. Para este tipo de
imagem em geral se utiliza uma representação de 16 ou 8 bits por pixel.
As imagens também podem ser representadas em Intensidade ou Potência, ou seja:
P = I 2 + Q 2 = A2
(2.27)
As imagens em Intensidade são de detecção quadrática e necessitam, em geral, de 32
bits para a representação de cada pixel.
As imagens multi-look normalmente são representadas em Amplitude.
2.4.4 - Efeitos Relacionados à Geometria
A seguir serão apresentados os principais fatores que degradam a qualidade geométrica
das imagens de radar adquiridas a partir de sensores orbitais. Estes efeitos também
podem ser verificados nas imagens adquiridas a partir de sensores aerotransportados.
2.4.4.1 - Linha de Visada
O radar produz imagens baseado na linha de visada e não na distância no solo. A
conversão da imagem para a dimensão real (distância no solo) pode ser feita ao custo da
interpolação de dados, que irá afetar os dados estatisticamente.
Além disso, diferenças de altura da vegetação e do terreno provocam tonalidades claras
(alta refletividade) nas feições voltadas para o feixe do radar e sombras naquelas
voltadas para o outro lado. Como se pode notar na Figura 2.15 as sombras, na imagem
de radar, provocadas por objetos com a mesma altura crescem com o aumento da linha
de visada, ou seja, com o aumento do ângulo de incidência.
54
ângulo de depressão
Sombras do
radar
Fig. 2.15 - Efeito da linha de visada no sombreamento do radar.
2.4.4.2 - Distorção de escala em imagens slant-range
Os sistemas SLAR usam um dos dois tipos de sistema de gravação da imagem:
• Gravação em linha de visada (slant-range), que utiliza uma taxa de
amostragem do sinal eco. Conseqüentemente, o espaçamento entre as
amostras consecutivas dos sinais de retorno nas imagens em slant-range é
diretamente proporcional ao período de amostragem.
• Gravação em distância no solo (ground-range), na qual a amostragem
incorpora uma correção hiperbólica sincronizada, onde o espaçamento entre
as amostras da imagem é aproximadamente proporcional à distância
horizontal no solo.
Linha da Imagem
ground-range
Linhaem
da formato
imagem em
formato
"ground-range"
Altur
Altura do
dae
Vôo H
vôo
H'
Linha da Imagem em
formato slant-range
Fig. 2.16 - Imagem em formato ground-range versus slant-range.
FONTE: adaptada de Lillesand e Kiefer (1994, p. 663).
55
A Figura 2.16 ilustra as características da gravação da imagem em slant-range e
ground-range. As letras A, B e C representam objetos de igual tamanho que estão
igualmente separados no solo. As distâncias respectivas dos objetos no solo são GR A ,
GR B e GR C .
A imagem slant-range, baseada diretamente no tempo do sinal de retorno, apresenta
distâncias desiguais entre os objetos, assim como tamanhos diferentes para os mesmos.
O resultado é uma variação na escala da imagem, que é mínima no ponto mais próximo
do sensor, near range, e progride hiperbolicamente para um máximo no ponto mais
afastado do sensor, far range (Lillesand e Kiefer, 1994). Portanto, na apresentação em
slant-range vale a relação A1 < B1 < C1 sobre o tamanho dos objetos, e a relação
AB < BC sobre a distância entre eles.
Aplicando-se uma correção hiperbólica pode-se formar uma imagem em ground-range
de escala constante, com A = B = C, e a distância AB = BC .
Evidentemente, as distorções de escala inerentes nas imagens slant-range impedem o
seu uso direto para mapeamentos planimétricos precisos. Entretanto, uma distância no
solo, GR , aproximada pode ser deduzida a partir da distância em linha de visada, SR , e
da altura de vôo, H', supondo-se um terreno plano, (Lillesand e Kiefer, 1994). A partir
da Figura 2.16 pode ser visto que:
2
2
SR = H '2 + GR ,
(2.28)
logo:
2
1
GR = ( SR − H ' 2 ) 2 .
(2.29)
Portanto, uma distância no solo (ground-range) pode ser calculada a partir de uma
imagem em linha de visada (slant-range), se a altura de vôo for conhecida.
56
2.4.4.3 - Sombreamento (Shadowing)
A intensidade do pulso de retorno depende de parâmetros do sensor, tais como, ângulo
de incidência, freqüência e polarização e de parâmetros do alvo iluminado, tais como,
rugosidade, constante dielétrica e geometria.
Uma encosta na qual o ângulo de incidência é pequeno possui maior refletividade que
uma encosta na qual o ângulo de incidência é maior. Portanto, será registrada numa
tonalidade mais clara, conforme veremos a seguir. Uma encosta muito íngreme pode
provocar sombras na imagem de radar (ausência de informação), como pode ser visto na
Figura 2.17.
A ocorrência de regiões sombreadas é um efeito especial que ocorre em SAR. Aqui o
termo sombra significa que a imagem não contém informações, devido às relações
geométricas que impedem a incidência da onda eletromagnética na cena a ser imageada.
O preenchimento dessa lacuna pode ser resolvido pelo princípio da visada dupla, ou
seja, obtenção de imagens a partir de duas direções diferentes de visada.
Adicionalmente, obtendo-se imagens sob perspectivas distintas, o volume de dados
disponíveis é aumentado, revelando informações (especialmente feições lineares) que
não são aparentes numa imagem de visada simples.
sinal do radar
área sombreada
Fig. 2.17 - Sombreamento (shadowing).
As sombras em imagens de radar ocorrem em encostas de colinas que estão com a face
voltada para a direção oposta à direção de visada. Se a encosta é mais íngreme do que a
incidência do feixe do radar, o terreno não será imageado por ele (Schreier, 1993).
57
Para encostas muito íngremes ou complexas, e principalmente para objetos feitos pelo
homem, teremos a interação de três efeitos geométricos: o sombreamento, a inversão
(layover) e o encurtamento (foreshortening), os quais podem mascarar uns aos outros
(Schreier, 1993). Estes efeitos serão discutidos nas seções 2.4.4.4 e 2.4.4.5.
Situações mais complexas poderiam facilmente ser construídas, mas teriam que
considerar o processo de imageamento da antena sintética e a geometria das múltiplas
reflexões.
As distorções tratadas neste trabalho estão relacionadas ao ângulo de incidência local,
que causa alterações na resolução local (no solo). Na Figura 2.18 a seguir, veremos esta
geometria local com mais detalhes.
Fig. 2.18 - Resoluções no solo e declive do terreno.
FONTE: adaptada de Schreier (1993, p. 119).
Considerando um terreno com declividade ϕ , a resolução transversal rt , expressa na
Figura 2.18 por x , pode ser calculada a partir do ângulo de incidência θ e da inclinação
local ϕ no triângulo ABC, como se segue:
58
x=
∆S
sen(θ − ϕ )
(2.30)
Considerando o triângulo ACD, temos que a resolução transversal rt projetada no solo,
expressa na Figura por ∆g , é dada por:
∆g = x. cos ϕ ;
(2.31)
substituindo (2.31) em (2.30), temos:
∆g =
∆S . cos ϕ
.
sen (θ − ϕ )
(2.32)
Esta fórmula auxilia na classificação das distorções geométricas, e fica óbvio que:
ϕ <θ
resulta em encurtamento;
ϕ ≥θ
resulta em inversão.
No caso especial em que ϕ = 0 , para terrenos planos, temos que a resolução transversal
rt é dada por:
∆g =
∆S
,
senθ
(2.33)
como a resolução em linha de visada rLV , expressa na Figura 2.18 por ∆S é dada por:
∆S =
cτ
,
2
(2.34)
cτ
,
2 senθ
(2.35)
temos que:
∆g =
Vamos calcular agora a resolução no solo para as encostas que estão inclinadas na
direção oposta ao sensor SAR. Supondo a mesma trigonometria da Figura 2.18, temos:
59
∆g =
∆S . cos ϕ
.
sen(θ + ϕ )
(2.36)
A Equação (2.33) pode ser deduzida a partir da Equação (2.32), contando ϕ positivo na
direção contrária à direção dos ponteiros do relógio, e negativo na direção destes,
supondo uma direção também contrária para θ .
No caso especial em que ϕ = 0 , o cálculo é o mesmo que o já apresentado. Entretanto,
∆g fica cada vez menor, a medida que ϕ aumenta. A partir da Equação (2.36), o
ângulo ϕ , quando ∆g fica menor do que ∆S , fica igual a:
ϕ>
(90 0 − θ )
.
2
(2.37)
O efeito de sombra é satisfeito quando ϕ = 90 0 − θ . Uma resolução no solo igual a zero
é conseguida quando ϕ = 90 , isto é, quando temos uma encosta vertical.
O problema de sombreamento nas imagens SAR é mais crítico em sensores
aerotransportados, devido à baixa altitude em relação à faixa imageada e,
conseqüentemente, aos ângulos de incidência maiores.
2.4.4.4 - Encurtamento (Foreshortening)
O sombreamento não é o único efeito relacionado à variação de altura no terreno. Se a
superfície fosse perfeitamente plana, elementos mais próximos do ponto nadir (vide
definição no Glossário), seriam iluminados pelo feixe do radar e refletiriam o sinal antes
daqueles
elementos
mais
afastados.
Os
sinais,
portanto,
seriam
refletidos
progressivamente no tempo da menor para a maior linha de visada.
Todavia, se um elemento da superfície está mais elevado que os elementos vizinhos, ele
irá interceptar o pulso do radar mais cedo e será mostrado na imagem de radar mais
próximo do ponto nadir do que realmente está. A Figura 2.19 mostra como este efeito
provoca um encurtamento (foreshortening) aparente, no plano da imagem de radar, das
60
encostas cuja parte inclinada está voltada para o de radar, ou seja, a encosta AB aparece
encurtada na imagem como A' B '.
As áreas de encurtamento podem ser claramente identificadas em imagens SAR. Elas
ocorrem como bordas claras no lado das feições voltadas para o sensor e dão às imagens
de regiões montanhosas ou acidentadas uma aparência plástica típica (Schreier, 1993).
.A' .B'
B
Plano da imagem de radar
___ ___
A'B' < AB
Sinal do radar
A
Fig. 2.19 - Encurtamento (foreshortening).
2.4.4.5 - Inversão (Layover)
O plano da imagem de radar na Figura 2.19 é uma projeção em ângulo reto da
conversão entre distância do alvo e localização do mesmo na imagem resultante, a qual
chamamos de imagem na linha de visada. Para casos extremos de encurtamento (torre
da Figura 2.20), a ordem de elementos de superfície na imagem de radar é inversa
àquela no solo, ou seja, B' está mais próximo que A', enquanto A deveria ser mapeado
antes de B para um posicionamento correto. A este efeito dá-se o nome de inversão.
B'
. A'
.
Plano da imagem de radar
B
Sinal do radar
A
Fig. 2.20 - Inversão (layover).
61
Devido à compressão geométrica da área, este efeito só é visível como uma borda clara
em áreas montanhosas e está associado ao efeito de encurtamento (Schreier, 1993).
Os pixels claros em áreas de encurtamento e inversão, mesmo que algumas vezes com
intensidades saturadas, devido a sistemas SAR que não foram bem calibrados ou
balanceados, são causados por dois efeitos.
Primeiramente, toda a energia do radar de um certo ângulo volumétrico, com a qual se
pretende imagear uma região de tamanho T, é detectada pelo sensor durante um período
de tempo muito curto. Assim, a energia é comprimida somente em algumas células de
resolução (Schreier, 1993).
Em segundo lugar, o ângulo de incidência nestas regiões fica próximo a 00, o que
significa uma reflexão máxima. Portanto, mais energia é refletida nestas áreas do que
em outras.
Devido à energia radiométrica quase saturada e à geometria distorcida da imagem nos
casos de encurtamento extremo ou inversão, a imagem é dificilmente interpretável
nestas áreas. Mesmo as imagens geo-referenciadas ou orto-retificadas só podem
fornecer um pouco mais de auxílio à interpretação, mas não vão restituir as distorções
radiométricas causadas por estes efeitos (Schreier, 1993).
O problema de inversão é mais crítico em sensores orbitais, devido ao decréscimo dos
ângulos de incidência na faixa imageada.
2.4.5 - Efeitos de Movimento
Além dos efeitos relacionados à geometria, podem ocorrer, durante a formação da
imagem de radar, efeitos decorrentes de movimentos não compensados da plataforma,
especialmente no caso de sensores aerotransportados. As plataformas orbitais são bem
mais estáveis, além de não sofrerem os efeitos de turbulência da atmosfera terrestre.
62
A Figura 2.21 ilustra o efeito de quatro distorções comentadas. Se as distorções são
adequadamente percebidas pelo sistema de navegação da plataforma, correções poderão
ser implementadas no sentido de minimizar os efeitos dessas distorções.
2.4.5.1 - Variação de Velocidade
Quando a seqüência de pulsos emitidos pelo radar não está adequadamente sincronizada
com a velocidade da plataforma, o resultado é um alongamento ou uma compressão não
linear do espaçamento dos pixels da imagem, conforme se diminui ou se aumenta a
velocidade da plataforma em relação à seqüência de pulsos emitidos, no sentido
azimutal (along track).
2.4.5.2 - Desvio Lateral ou Vertical
Se houver um desses movimentos da aeronave em relação à linha de vôo pretendida,
distorções curvilíneas ocorrerão, tornando uma linha reta e paralela à direção de vôo (tal
como uma estrada, por exemplo) numa linha sinuosa.
2.4.5.3 - Guinada da Plataforma (Yaw)
O efeito de guinadas é a distorção da direção relativa entre diferentes pontos, conforme
o posicionamento destes em relação à linha de vôo. Guinadas extremas, como a de uma
curva, podem distorcer completamente uma imagem.
2.4.5.4 - Arfagem da Plataforma (Pitch)
Um movimento de arfagem da plataforma irá mover a intersecção do feixe do radar com
o solo para a frente ou para trás da posição situada lateralmente ao ponto subnadir. O
efeito provocado é similar àquele proveniente da variação de velocidade em terrenos
planos.
63
2.4.5.5 - Rolamento da Plataforma (Roll)
O rolamento lateral da plataforma produz o efeito de mudança de ganho da antena em
diferentes pontos da imagem, modulando, conseqüentemente, a escala de cinza da
imagem.
Fig.2.21 - D istorções causadas por efeitos de m ovim ento da plataform a não
com pensados.
FONTE: adaptada de Ulaby et al. (1982c, p. 618).
64
CAPÍTULO 3
SISTEMAS DE RADAR ESTUDADOS
A seguir são apresentadas as características dos sistemas de radar avaliados neste
trabalho, RADARSAT e JERS-1, assim como os aspectos relacionados com a correção
geométrica de cada produto, por sistema.
3.1 - SAR/JERS-1
3.1.1 - A plataforma
O Satélite Japonês de Recursos Terrestres (JERS-1) é um sistema avançado de
sensoriamento remoto, que possui um radar de abertura sintética e um sensor ótico de
alta definição (National Space Development Agency of Japan - NASDA, 1994).
O principal objetivo do JERS-1 (Figura 3.1) é coletar informações de recursos naturais
de maneira global e conduzir observações para pesquisas em agricultura, vigilância de
florestas, preservação ambiental, prevenção de catástrofes, monitoramento costeiro e
aplicações geológicas.
Dentre os inúmeros trabalhos citados na literatura, cito como exemplo Dutra et al.
(1999), que teve como objetivo, dentro do programa Global Rain Forest Mapping
Project - GRFM, apresentar a experiência do Brasil com o uso dos dados do Jers-1
como fonte de informação para a estimação de biomassa, caracterização do
uso/cobertura do solo e delineamento dos diferentes habitats na Amazônia Brasileira.
O JERS-1 foi lançado em 11 de fevereiro de 1992 e operou até o dia 11 de outubro de
1998, sendo suas principais características apresentadas na Tabela 3.1.
65
Fig. 3.1 - A plataforma do JERS-1.
FONTE: (NASDA, 1994).
TABELA 3.1 - PRINCIPAIS CARACTERÍSTICAS DO JERS-1
Órbita
Altitude
Período
Período de recorrência
Horário de passagem
equador (descendente)
Equipamentos da missão
Veículo lançador
Hélio-síncrona
568 Km
96 min
44 dias
pelo
10:30 até 11:00 horário local
- Radar de Abertura Sintética
- Sensor ótico
- Gravador de dados
- Transmissor de dados
Foguete H-1
FONTE: (NASDA, 1994).
3.1.2 - O sensor
O SAR a bordo do JERS-1 foi desenvolvido tendo como base outros sistemas de
observação da Terra (tais como o satélite SEASAT), tendo sido assunto de várias
reuniões com os usuários dos dados. Destas reuniões ficou acertado que o SAR seria
desenvolvido para aplicações geológicas. Para isso, os principais requisitos do sensor
foram: a) operar com grandes ângulos de incidência para diminuir o efeito de
66
encurtamento; b) resolução melhor que 20m de modo a obter feições geológicas de
modo preciso.
Outro pré-requisito observado foi o uso da banda L para possibilitar a aquisição de
dados do solo onde há cobertura vegetal.
As principais características do SAR a bordo do JERS-1 estão listadas na Tabela 3.2.
TABELA 3.2 - PRINCIPAIS CARACTERÍSTICAS DO SAR/JERS-1
Freqüência
Polarização
Ângulo de incidência
Resolução espacial
Faixa imageada
Ruído equivalente
1,275 GHz (banda L)
Linear HH
35º
18m x 18m (3 looks)
75 Km
< -20,5 dB
FONTE: (NASDA, 1994).
3.1.3 - Aspectos geométricos dos produtos JERS-1
A Tabela 3.3 apresenta as correções que são aplicadas aos diversos produtos JERS-1
disponíveis aos usuários. A correção das distorções das imagens SAR é dividida em sete
passos, do nível 1 ao nível 4 (0; 1.0; 1.1; 2.0; 2.1; 3; 4).
67
TABELA 3.3 - NÍVEL DE PRECISÃO GEOMÉTRICA DAS IMAGENS JERS-1
(PROCESSAMENTO DOS DADOS)
NÍVEL
0
NOME
Unprocessed
Product
CORREÇÕES EFETUADAS
Signal
Data
Dados que não receberam nenhuma correção.
1.0
Partially Processed Signal
Data Product
1.1
Basic Image Product
Dados que receberam compressão em azimute, em adição ao
processamento do nível 1.0. Dois tipos de processamento em
look podem ser selecionados (3 looks e 1 look).
2.0
Bulk Image Product
Dados que receberam compressão em range e azimute
(processamento até o nível 1.1) são convertidos para
corresponderem a σ0 (coeficiente de retroespalhamento).
Posteriormente, é realizada uma reamostragem para
conversão de slant-range para ground-range.
2.1
Standard Geocoded Image
Product
Standard Processed Products
3
4
Precise Corrected
Product
Geocoded
Correction
with
Dados que receberam somente compressão em range.
É realizada uma reamostragem nos dados obtidos no nível
1.1, considerando a projeção de um mapa. Dois tipos de
projeção estão disponíveis UTM2. e PS3 A NASDA define
este processo como processo padrão.
Image
É realizada uma correção geométrica mais precisa
utilizando-se pontos de controle, em adição ao
processamento realizado no nível 1.1. A altitude não é
corrigida neste nível de processamento.
Terrain
É realizada a correção de encurtamento "foreshortening"
utilizando-se informação numérica (modelo numérico do
terreno), em adição ao processamento realizado no nível 1.1.
FONTE: (NASDA, 1994).
3.2 - RADARSAT
O RADARSAT (Figura 3.2) é um projeto avançado de satélite de observação da Terra
desenvolvido pelo Canadá para monitorar mudanças ambientais dentre outras
atividades. É um projeto que trabalha exclusivamente na faixa de microondas, tendo
sido lançado em 1995. Trata-se do primeiro satélite cuja concepção foi orientada à
2 A projeção UTM (Universal Transversa de Mercator) divide a Terra em 60 zonas, cada uma com 6º de largura em longitude. Esta projeção cobre o globo entre as
latitudes 84º N até 80º S.
3 A projeção PS (Polar Estereográfica) é usada para cobrir as áreas polares entre 84º e 90º (Pólo Norte) e entre 80º e 90º (Pólo Sul).
68
produção e distribuição comercial de dados de radar em larga escala (Canadian Space
Agency-CSA, 1996).
Fig. 3.2 - O satélite RADARSAT.
FONTE: (CSA, 1996).
Para seu projeto e construção, reuniram-se em um arrojado projeto de marketing,
empresas e governo em torno da criação de 10.000 postos de trabalho, com retorno
esperado de cerca de 800 milhões de dólares canadenses (CSA, 1996).
Usando uma única freqüência na banda C (5,3 GHz), o RADARSAT apresenta
características de imageamento bastante peculiares, podendo obter imagens com
resolução espacial variando de 10 a 100 metros, com faixas de varredura que variam de
50 a 500 Km. Os ângulos de incidência variam de menos de 20 graus a mais de 50 graus
(CSA, 1996).
O satélite apresenta órbita quase polar, hélio-síncrona, a uma altitude de
aproximadamente 800 Km. Sua passagem pela linha do equador, em sentido
descendente, ocorre às 06:00h e em sentido ascendente às 18:00h (órbita dawn-dusk),
proporcionando, assim, uma iluminação praticamente contínua sobre o painel solar. Tal
característica representa um ganho energético em relação aos demais satélites ativos,
uma vez que permite uma capacidade de imageamento a qualquer hora do dia (28
minutos por órbita), devido à economia de energia do banco de baterias (Parashar et al.,
1993).
69
Órbita Dawn-Dusk: É uma órbita hélio-síncrona, significando que as passagens do
satélite são sempre no mesmo horário local. Isto é particularmente importante para o
estudo de conjuntos de dados multi-temporais para a predição de colheitas, onde a
influência de efeitos devido às variações diurnas deve ser reduzida (CSA, 1996). A
Figura 3.3 apresenta a órbita do RADARSAT.
Fig. 3.3 - Órbita Dawn-Dusk.
FONTE: (CSA, 1996).
O SAR apresenta visada para a direita em relação ao sentido de deslocamento do
satélite, mas o projeto permite a reorientação da visada para a esquerda, possibilitando
assim o imageamento do pólo Sul, o qual é inacessível no modo de operação normal,
devido à inclinação da órbita (Luscombe et al., 1993).
O satélite circula a Terra 14 vezes em 24 horas, levando a um tempo de revisita de 24
dias com 343 revoluções durante este tempo. O tempo de revisita pode ser modificado,
utilizando-se os vários modos de imageamento disponíveis (Parashar et al., 1993). A
Tabela 3.4 apresenta estes tempos de revisita, em função do modo de operação e da
latitude.
70
TABELA 3.4 - TEMPO DE REVISITA DO RADARSAT (DIAS)
LATITUDE
FINE BEAM
MODE
STANDARD BEAM
MODE
WIDE BEAM
MODE
SCANSAR BEAM
MODE
MÍN. MÁX.
MÍN. MÁX.
MÍN. MÁX.
MÍN. MÁX.
0º
4
10
2
5
2
5
2
5
10º
4
9
2
5
2
5
2
5
20º
4
8
2
4
2
4
2
4
30º
3
8
2
4
2
4
2
4
40º
3
6
2
3
2
3
2
3
50º
3
5
2
3
2
3
2
3
60º
2
3
1
2
1
2
1
2
70º
2
1
1
1
FONTE: (RADARSAT International, 1995).
A Figura 3.4, a seguir, mostra a cobertura típica disponível para o RADARSAT
utilizando-se a largura de faixa de 500 km (modo ScanSar wide).
71
Fig. 3.4 - Cobertura típica disponível do RADARSAT usando a largura de faixa de 500
km: (a) América do Norte, cobertura de um dia; (b) América do Norte,
cobertura de três dias; e (c) Amazônia, um exemplo de cobertura equatorial
para três dias. Em todos os casos, os dados de imagem disponíveis são
mostrados em amarelo.
FONTE: (CSA, 1996).
72
As Tabelas a seguir apresentam as demais características do sensor, da plataforma, da
órbita do satélite e dos produtos.
TABELA 3.5 - CARACTERÍSTICAS DO SENSOR RADARSAT SAR
Freqüência / Comprimento de onda
5.3GHz/C-band 5.6 cm
Potência do transmissor (pico)
5 kW
Potência do transmissor (média)
300 W
Taxa de dados máxima
85 Mb/s (recorded) - 105 Mb/s (R/T)
Tamanho da antena
15m x 1,5m
Polarização da antena
HH
Largura de faixa máxima acessível
500 Km
Ângulos de incidência na faixa
20º a 50º
Ângulos de incidência extendidos
10º a 20º, 50º a 60º
(experimental)
FONTE: (CSA, 1996).
TABELA 3.6 - CARACTERÍSTICAS DA PLATAFORMA
Massa total no lançamento
2,750 kg
Potência do painel solar
2.5 kW
Baterias
3 x 48 Ah NiCd
Vida útil
5 anos
FONTE: (CSA, 1996).
TABELA 3.7 - CARACTERÍSTICAS DA ÓRBITA
Altitude
793-821 km
Inclinação
98,6 graus
Período
101 min.
Órbita ascendente
18:00 hrs.
Órbita descendente
06:00 hrs.
Hélio-síncrono
14 7/24 órbitas por dia
FONTE: (CSA, 1996).
73
TABELA 3.8 - CARACTERÍSTICAS DOS PRODUTOS RADARSAT
APRESENTAÇÃO
ORIENTAÇÃO DA
CARACT. DEFINIDAS
PLANA
IMAGEM
PELO USUÁRIO
N/A
N/A
nenhuma
Slant range
Órbita do satélite
nenhuma
Path Image
Ground range
Órbita do satélite
nenhuma
Path Image Plus
Ground range
Órbita do satélite
nenhuma
Map Image
Ground range
mapa
Projeção do mapa
Precision Map Image
Ground range
mapa
Projeção do mapa e pc's
NOME DO PRODUTO
Dados do sinal
Single Look Complex
FONTE: (CSA, 1996).
Os produtos da Radarsat consistem de imagens SAR ou dados do sinal, armazenados
em meio magnético ou ótico. Esses produtos são caracterizados pelo modo de
imageamento e posição do feixe utilizado pelo satélite, e pelo nível de processamento
aplicado aos dados. Um resumo dos vários tipos de produtos gerados são apresentados
na Tabela 3.9.
TABELA 3.9 – LISTA DE PRODUTOS DA RADARSAT
NÍVEL DE PROCESSAMENTO
Dados do Sinal
Georreferenciado
Geocodificado
TIPO DE PRODUTO
Dados do Sinal
Single Look Complex
Path Image
Path Image Plus
ScanSAR Narrow
ScanSAR Wide
Map Image
Precision Map Image
FONTE: (Radarsat International, 1997).
1) Terminologia utilizada pelos usuários.
74
1
NÍVEL DO PRODUTO
Nível 1
Nível 2
Nível 2
Nível 2
Nível 2
Nível 2
Nível 3
Nível 3
3.2.1 – Modos de Operação ou Imageamento
A Figura 3.5, a seguir, apresenta os modos de operação do RADARSAT.
Fig. 3.5 - Modos de operação do RADARSAT SAR.
FONTE: (Radarsat International, 1997).
O SAR pode operar em um dos seguintes modos:
•
Feixe Simples, em inglês “Single Beam”, ou
•
ScanSAR.
A Figura 3.6 apresenta as relações entre os modos de imageamento e os feixes
individuais usados dentro de cada modo.
75
SAR
Instrument
Single Beam
Mode
Standard
ScanSAR
Mode
Extended
Low
Fine
Beams
S1
S2
S3
S4
S5
S6
S7
Extended
High
Wide
ScanSAR
Wide
Beams
Beams
Beams
EL1
SNA=W1+W2
SNB=W2+S5+S6
SWA=W1+W2+W3+S7
SWB=W1+W2+S5+S6
Beams
Beams
W1
W2
W3
ScanSAR
Narrow
Beams
F1, F1N, F1F
F2, F2N, F2F
F3, F3N, F3F
F4, F4N, F4F
F5, F5N, F5F
EH1
EH2
EH3
EH4
EH5
EH6
Fig. 3.6 - Modos de operação do RADARSAT SAR.
FONTE: (Radarsat International, 1997).
A Tabela 3.10, a seguir, apresenta as principais características dos modos de operação
disponíveis para o RADARSAT.
76
TABELA 3.10 – CARACTERÍSTICAS DOS MODOS DE IMAGEAMENTO
ÂNGULO DE
INCIDÊNCIA
(GRAUS)
RESOLUÇÃO (M)
1
2
RANGE XAZIMUTE
S1
S2
S3
S4
S5
S6
S7
20-27
24-31
30-37
34-40
36-42
41-46
45-49
24 x 27
20 x 27
25 x 27
23 x 27
22 x 27
20 x 27
19 x 27
F1
F2
F3
F4
F5
37-41
39-42
41-44
43-46
45-47
8.3 x 8.4
7.9 x 8.4
7.6 x 8.4
7.3 x 8.4
7.1 x 8.4
50
W1
W2
W3
20-31
31-39
39-45
33 x 27
25 x 27
21 x 27
150
EL1
10-23
39 x 27
170
EH1
EH2
EH3
EH4
EH5
EH6
ScanSAR Narrow:
SNA
SNB
ScanSAR Wide:
SWA
SWB
49-52
50-53
52-55
54-57
56-58
57-60
18 x 27
18 x 27
17 x 27
17 x 27
16 x 27
16 x 27
75
20-39
31-46
50 x 50
50 x 50
300
20-49
20-46
100 x 100
100 x 100
500
450
MODOS DE
IMAGEAMENTO/
POSIÇÃO
LARGURA DA
FAIXA
IMAGEADA (KM)
Standard:
100
Fine:
Wide:
Extended Low:
Extended High:
FONTE: (Radarsat International, 1997).
1) A resolução nominal em ground-range varia com a distância.
2) Depende do número de looks.
77
3.2.2 – Níveis de processamento
Os produtos da RADARSAT estão disponíveis em três níveis de processamento: dados
do sinal (forma bruta), dados georreferenciados e dados geocodificados, cujas
características são apresentadas a seguir.
A Figura 3.7 mostra o processo de formação e extração de informações do sistema
SAR. As principais partes deste processo são:
1) o sensor radar que ilumina a cena recebe o sinal eco e gera através de um
sistema de demodulação o vídeo bruto,
2) o processador que sintetiza a imagem explorando as características da seqüência
de sinais eco recebidos, e
3) o processador de imagens que filtra os ruídos e interferências, detecta alvos,
bordas e características peculiares na cena, segmenta e classifica as partes que
compõe a imagem da cena.
Imagem
da cena
SAR
Vídeo bruto Processador para
Sensor Radar
geração da
imagem
Iluminação
Processador de
imagens
Informações
sobre a cena
Cena
Fig. 3.7 – Processo de geração e processamento das imagens SAR.
FONTE: adaptada de Fernandes e Fernandes (1998, p. 4).
O processo de demodulação, realizado pelo sistema radar, permite que a imagem final
sintetizada pelo processador de sinais seja complexa, ou seja, contenha informação de
amplitude e fase relativa a cena imageada. A amplitude se relaciona a intensidade da
78
reflexão da onda eletromagnética na cena e a fase é relativa ao trajeto entre a antena e a
cena e ao mecanismo de reflexão que altera a fase da onda incidente. A partir da
imagem complexa pode-se gerar a imagem amplitude, que é o módulo da imagem
complexa, ou a imagem intensidade, que é o módulo ao quadrado da imagem complexa.
As principais características dos diferentes níveis de processamento são apresentadas a
seguir:
•
Dado Bruto (RAW).
É um dado fornecido no formato complexo (I+jQ). Este produto deve ser processado
para que possa ser apresentado como uma imagem.
•
Dado Georreferenciado (Single Look Complex, Path Image, Path Image Plus,
ScanSAR Narrow e ScanSAR Wide).
A imagem é georreferenciada utilizando-se dados da órbita e da atitude do satélite. Isso
permite que informações de latitude e longitude possam ser calculadas para cada linha
da imagem. Para este cálculo a forma da Terra é considerada como sendo um elipsóide.
Cada linha da imagem contém informação auxiliar que inclui a latitude e longitude do
primeiro pixel, do pixel do meio e do último pixel da linha.
O produto Single Look Complex é fornecido em slant-range e cada pixel da imagem é
representado por um número complexo, a fim de preservar a amplitude e a fase da
informação.
O produto Path Image é fornecido em ground-range e com espaçamento entre pixels de
12,5 m, para os modos de imageamento Standard, Wide, Extended Low e Extended
High, ou 6,25 m para o modo Fine.
O produto Path Image Plus é gerado com uma taxa de amostragem mais densa do que
os produtos Path Image, a fim de utilizar de forma mais completa a resolução do
sistema SAR. O espaçamento entre pixels varia de acordo com o modo de imageamento:
79
8 m para os modos Standard e Extended High (4 looks), 10 m para os modos Wide e
Extended Low (4 looks), e 3,125 m para o modo Fine.
O produto ScanSAR Narrow é obtido pela multiplexagem de dois ou três feixes simples,
com espaçamento entre pixels de 25 m. Estes produtos são gerados com 2 looks em
range e 2 looks em azimute.
O produto ScanSAR Wide é obtido pela multiplexagem de quatro feixes simples, com
espaçamento entre pixels de 50 m. Estes produtos são gerados com 4 looks em range e 2
looks em azimute.
•
Dado Geocodificado (Map Image e Precision Map Image).
Estes são os dados de mais alto nível de processamento. No produto Map Image as
coordenadas da imagem são convertidas para uma dada projeção, utilizando-se a
informação de órbita do satélite. Este produto pode ser obtido a partir de qualquer feixe
simples (Standard, Fine, Wide, Extended Low e Extended High), sendo que no produto
obtido a partir do modo Fine o espaçamento entre pixels é de 6,25 m e a partir dos
demais é de 12,5 m.
O produto Precision Map Image é corrigido utilizando-se um mapa topográfico ou um
determinado número de pontos de controle. A posição geográfica deste produto pode ser
posteriormente refinada pelo uso de um modelo digital de elevação, obtendo-se uma
imagem orto-retificada. Os produtos disponíveis são similares aos Map Image quanto às
projeções e espaçamento entre pixels.
3.2.3 – Aspectos geométricos dos produtos RADARSAT
A Tabela 3.11 apresenta os aspectos relacionados à qualidade geométrica das imagens
RADARSAT, ou seja, correções previamente aplicadas pela RADARSAT em cada tipo
de produto.
As diferenças de elevação dentro de uma imagem podem introduzir erros de posição
relativa adicionais. Estes erros podem ser particularmente severos em áreas de relevo
80
elevado (i.e., áreas montanhosas). As distorções relacionadas às diferenças de elevação
podem ser calculadas de imediato e são função da elevação do alvo e do ângulo de
incidência do feixe utilizado para imagear este alvo. O deslocamento esperado do alvo a
partir de sua posição real é resumido pela seguinte equação:
Deslocamento = diferença de elevação x fator de escala topográfica (TSF) do feixe;
onde o fator de escala topográfica do feixe é um fator que reflete o modo e o ângulo de
incidência utilizados.
Guindon (1993) citado em RADARSAT (1995) forneceu a fórmula para calcular estes
valores, levando em consideração a curvatura da Terra, a altitude do satélite e outros
parâmetros. A Tabela 3.12 fornece uma aproximação destes valores para cada posição
dos modos de imageamento.
TABELA 3.11 - NÍVEL DE PRECISÃO GEOMÉTRICA DAS IMAGENS RADARSAT
TIPO DE IMAGEM
CARACTERÍSTICAS
Path Image
ESPECIFICAÇÃO
< 1,5 Km
ESTIMATIVA
< 630 m
ERRO
GEOMÉTRICO
1
RELATIVO
< 40 m
MODOS DISPONÍVEIS
Standard, Fine, Wide, ScanSar
1) A imagem é alinhada ao longo da trajetória do satélite.
2) A imagem é corrigida para os erros sistemáticos relacionados ao movimento do satélite, ao instrumento SAR e
ao processador, e à recepção dos dados.
3) É utilizada uma informação prevista da posição do satélite.
Path Image Plus
< 1,5 Km
< 250 m
< 40 m
Standard, Fine, Wide, ScanSar
1) A imagem é alinhada ao longo da trajetória do satélite.
2) A imagem é corrigida para os erros sistemáticos relacionados ao movimento do satélite, ao instrumento SAR e
ao processador, e à recepção dos dados.
3) É utilizada uma informação mais precisa da posição do satélite.
Map Image
< 1,5 Km
< 250 m
< 40 m
Standard, Fine, Wide,
1) A imagem pode estar relacionada a um mapa, sem rotação ou translação.
2) A imagem é corrigida para os erros sistemáticos.
Precision Map Image
< 40 m
< 40 m
< 40 m
Standard, Fine, Wide,
1) A imagem pode estar relacionada a um mapa.
2) Correção de precisão usando pontos de controle no terreno.
Para cenas com terreno de relevo elevado, um modelo digital de elevação pode opcionalmente ser aplicado.
FONTE: (RADARSAT International, 1995).
1) Supõe um terreno plano, sem diferenças de elevação.
81
TABELA 3.12 - FATORES DE ESCALA TOPOGRÁFICA (TSF) PARA AS
DIVERSAS POSIÇÕES DOS MODOS DE IMAGEAMENTO DO RADARSAT
MODO DE
IMAGEAMENTO
POSIÇÃO DO FEIXE
1
2
3
4
5
6
7
Standard
2,3
1,9
1,5
1,3
1,2
1,1
0,9
Fine
1,3
1,2
1,1
1,0
0,9
Wide
1,7-2,7
1,2-1,7
ScanSar Narrow
1,2-1,7
1,0-1,7
ScanSar Wide
0,8-2,7
Extended High
0,8
0,7
0,7
0,6
Extended Low
2,4-5,7
0,8
0,6
FONTE: : (RADARSAT International, 1995).
Os valores de TSF variam ao longo da imagem devido às variações do ângulo de
incidência do near para o far range. Uma faixa de fatores de escala é apresentada para
os feixes que apresentam as maiores variações. Os valores de TSF podem ser
aproximadamente calculados utilizando-se a co-tangente do ângulo de incidência.
(RADARSAT International, 1995).
3.2.4 - Escala dos produtos RADARSAT
Os dados do RADARSAT têm a vantagem de fornecer seus produtos em diversas
escalas. Existem sete tamanhos de imagem, chamados modos de imageamento. Cada
modo é definido pela área que cobre e pelo nível de detalhe (resolução) disponível.
Os modos de imageamento variam do modo fine, que cobre uma área de 50 x 50Km, até
o modo ScanSar, que cobre uma área de 500 x 500 Km. O modo ScanSar fornece
produtos na escala de 1:5.000.000 a 1:250.000. Os modos Standard e Wide são úteis em
escalas maiores: 1:1.000.000 a 1:100.000. O modo fine fornece um nível de detalhes
adicional nas escalas 1:250.000 a 1:50.000 (RADARSAT International, 1995).
82
3.2.5 – Termos relativos aos produtos RADARSAT
Nesta seção serão apesentados alguns dos termos que são utilizados para caracterizar os
produtos da RADARSAT.
SISTEMA DE COORDENADAS:
Os produtos georreferenciados são fornecidos em um dos
dois formatos: slant-range ou ground-range. As coordenadas em slant-range mantêm o
espaçamento entre pixels original do sinal. Este espaçamento não é uniforme ao longo
da imagem. Por exemplo, os pixels que representam a área da imagem mais próxima ao
satélite cobrem uma área do terreno maior do que aqueles que representam a região
mais afastada deste. O espaçamento entre pixels para uma imagem com coordenadas em
ground-range é normalizado para um tamanho de pixel uniforme.
COBERTURA NOMINAL DA IMAGEM:
A cobertura da imagem é a área do terreno dentro
daquela imagem; e é nominal a medida que a largura é escolhida de forma que todo o
dado em range, ou seja, na direção transversal da imagem, é processado e incluído na
imagem. Desta forma, a largura exata irá variar de imagem para imagem. Para os
produtos gerados nos modos de feixe simples, o comprimento da imagem é definido de
forma que seja igual à largura. Para os produtos gerados no modo ScanSAR, o
comprimento da imagem é variável, e pode ser definido pelo usuário. A cobertura da
imagem é definida em termos de range e azimute.
ESPAÇAMENTO ENTRE PIXELS:
Vide definição no Glossário.
TAMANHO NOMINAL DA IMAGEM:
O tamanho nominal da imagem é dado pelo produto
do número de pixels por linha pelo número de linhas, onde o número de pixels por linha
pode ser calculado da seguinte forma:
pixels por linha =
tamanho da imagem na direção transversa l
,
espaçamento entre pixels na direção transversa l
da mesma forma, o número de linhas em uma imagem é dado por:
linhas =
tamanho da imagem na direção azimutal
.
espaçamento entre pixels na direção azimutal
83
VOLUME NOMINAL DO PRODUTO:
É o tamanho do arquivo digital que representa a
imagem, e é calculado da seguinte forma:
volume = pixels por linha × número de linhas × número de bytes por pixel
ÂNGULO DE INCIDÊNCIA NOMINAL:
O ângulo de incidência nominal é especificado na
borda mais próxima e na mais afastada de cada feixe do radar, com relação a faixa
imageada. O ângulo de incidência é o ângulo entre o feixe de radar e o eixo
perpendicular a superfície horizontal plana.
ÂNGULO DE INCIDÊNCIA LOCAL:
O ângulo de incidência local é o ângulo entre o feixe
de radar e a normal a superfície imageada.
RESOLUÇÃO NOMINAL EM RANGE:
Para os produtos em ground-range, a resolução
nominal em range é especificada na borda mais próxima e na mais afastada de cada
feixe do radar. Esta resolução é definida em termos da largura da resposta impulsiva em
3 db, na direção transversal (range) da imagem, onde:
•
A função de resposta impulsiva é um sinal bi-dimensional que aparece em uma
imagem processada, como resultado da compressão do pulso de energia que retorna
de um alvo pontual.
•
A largura da resposta impulsiva é definida como a largura da função de resposta
impulsiva a um nível de potência 3 db abaixo do pico da função.
RESOLUÇÃO
NOMINAL EM AZIMUTE:
Esta resolução é especificada em termos da
largura da resposta impulsiva em 3 db na direção azimutal. A resolução nominal em
azimute é constante dentro de cada feixe.
ERRO RADIOMÉTRICO:
O erro radiométrico é o desvio na energia integrada entre duas
áreas de uma imagem, consistindo de ruído aleatório.
ERRO DE LOCALIZAÇÃO ABSOLUTO:
É definido como a distância no terreno, entre a
posição medida e a posição prevista de alvos pontuais dentro da imagem processada.
84
DISTORÇÃO GEOMÉTRICA:
Também chamada de erro geométrico relativo, é definida
como o erro máximo de distância (relativa), entre pontos de uma imagem processada,
dentro de uma área de 100 km x 100 km. A medida da distância em range será em
termos de slant-range ou ground-range, dependendo do tipo de imagem.
ERRO DE FASE RELATIVO:
É o desvio entre a diferença de fase medida e a prevista de
dois alvos pontuais em uma imagem complexa. Os alvos pontuais escolhidos devem
estar dentro de uma área de 100 km x 100 km da imagem processada.
NÚMERO DE VISADAS EM AZIMUTE:
É o número de visadas (looks) processadas com
superposição, na direção azimutal.
NÚMERO DE VISADAS EM RANGE:
É o número de visadas (looks) processadas com
superposição, na direção transversal. Todos os produtos obtidos a partir dos modos de
imageamento que utilizam feixe simples têm 01 (um) look em range.
NÚMERO DE VISADAS EFETIVO:
Representa o número de looks estatisticamente
independentes do produto. Este número é menor do que o número total de visadas
devido à sobreposição das visadas.
85
CAPÍTULO 4
GEOCODIFICAÇÃO DE IMAGENS
As definições a seguir serão usadas no decorrer do presente trabalho.
•
REGISTRO:
Em inglês (registration) é o processo de alinhar geometricamente
dois ou mais conjuntos de imagens, de tal forma que as células de resolução para uma
mesma área possam ser digitalmente ou visualmente superpostas. Os dados registrados
podem ser do mesmo tipo de sensor ou de sensores diferentes, assim como terem sido
coletados em épocas diferentes (Simonett, 1983).
•
GEOREFERENCIAMENTO:
Em Inglês (georeferencing) é o processo pelo qual uma
imagem passa a incorporar informação de latitude e longitude, porém, sem modificação
da sua geometria. (RADARSAT International, 1995).
•
GEOCODIFICAÇÃO:
Em inglês (geocoding) é a correção geométrica de uma
imagem para que se ajuste a uma determinada projeção. Pontos de controle no terreno
são normalmente utilizados para aumentar a exatidão do processo de geocodificação
(RADARSAT International, 1995).
•
ORTO-RETIFICAÇÃO:
Em inglês (orthorectification) é a correção geométrica de
uma imagem, de forma que as distorções ocorridas na mesma, causadas pela plataforma
(posição, velocidade e orientação), pelo sensor (geometria de imageamento), pela Terra
(geóide-ellipsóide incluindo elevação) e pela projeção cartográfica (ellipsóide-plano
cartográfico) são removidas (PCI, 1997).
•
CORREÇÃO GEOMÉTRICA:
Em inglês (geometric correction) é o processo que visa
corrigir as distorções geométricas internas de uma imagem SAR causadas pelo sensor,
pela plataforma e pela geometria de imageamento (Curlander e McDonough, 1991).
Assim sendo, este trabalho utilizará, daqui em diante, os termos acima citados, com seus
respectivos conceitos.
87
Existem duas técnicas que podem ser utilizadas para corrigir os vários tipos de
distorções geométricas presentes em imagens orbitais. A primeira modela a natureza e
magnitude das fontes de distorção e utiliza este modelo a fim de definir uma fórmula de
correção. Esta técnica é efetiva quando os tipos de distorção são bem caracterizados,
tais como aqueles causados pela rotação da Terra4.
A segunda técnica depende do estabelecimento de relações matemáticas entre o
posicionamento dos pixels em uma imagem e as coordenadas correspondentes destes
pontos no solo através de um mapa, por exemplo. Esta técnica, por ser a mais utilizada,
e por tratar-se de um modelo simples e de fácil execução, será aplicada neste trabalho
durante a fase de geocodificação das imagens de radar (correção das distorções
geométricas), segundo Richards (1993).
Estas técnicas têm importância prática quando deseja-se fazer uso destas imagens em
aplicações de geoprocessamento. A seguir é apresentada uma revisão teórica desta
técnica.
4.1 - Uso de polinômios de mapeamento para correção geométrica de imagens
Uma hipótese que é feita neste procedimento é a existência de um mapa planimétrico ou
plani-altimétrico confiável, ou seja, geometricamente correto (sem distorções) e em uma
escala adequada para a área em questão. Quando o usuário não tem disponível um
mapa, a alternativa é medir precisamente no terreno a posição geográfica de alguns
pontos identificáveis nas imagens usando, por exemplo, um Sistema de Posicionamento
Global - GPS (em inglês - Global Positioning System). São então definidos dois
sistemas de coordenadas cartesianas, como mostrado na Figura 4.1. Um dos sistemas
define a localização dos pontos no mapa ( x, y ) e o outro define a localização dos pixels
na imagem (u , v ) . Supondo que estes dois sistemas de coordenadas possam ser
relacionados através de um par de funções de mapeamento f e g , teremos:
u = f ( x, y )
4
(4.1a)
Os produtos fornecidos pela Radarsat e Jers-1 já incorporam estas correções.
88
v = g ( x, y )
(4.1b)
MAPA
MAPA
IMAGEM
IMAGEM
Fig. 4.1 - Sistemas de coordenadas definidos para a imagem e o mapa, juntamente com
a especificação de pontos de controle no terreno.
FONTE: adaptada de Richards (1993. p. 57).
Conhecendo-se estas funções, é possível localizar um ponto na imagem, tendo sua
posição no mapa e vice-versa. Pode-se assim reconstruir uma versão geometricamente
correta da imagem original, da forma descrita a seguir:
Inicialmente, define-se uma grade sobre o mapa, podendo ser a própria grade de
coordenadas do mapa, descrita, por exemplo, por coordenadas geográficas (latitudes e
longitudes) ou por coordenadas UTM. Move-se, então, sobre esta grade, pixel a pixel
(utilizando o centro de cada pixel para este deslocamento), e utiliza-se as funções de
mapeamento já citadas a fim de encontrar o pixel correspondente na imagem. Ao final
deste processo obtém-se uma imagem geometricamente corrigida, reconstruída sobre a
grade anteriormente definida.
Embora este seja um processo direto, existem algumas dificuldades práticas que devem
ser levadas em consideração. Primeiramente, não se conhece a forma explícita das
funções de mapeamento apresentadas em (4.1). Em segundo lugar, mesmo se esta forma
fosse conhecida, estas equações poderiam não apontar exatamente para um pixel na
imagem correspondente a uma posição da grade que foi estipulada. Logo, alguma forma
de interpolação pode ser necessária.
89
4.1.1 - Polinômios de mapeamento e pontos de controle
Uma vez que a forma das funções de mapeamento em (4.1) não são conhecidas, elas
são, geralmente, escolhidas como polinômios simples de primeira, segunda ou terceira
ordem (ou grau). Por exemplo, no caso de um polinômio de segundo grau, temos:
u = a 0 + a1 x + a 2 y + a 3 xy + a 4 x 2 + a 5 y 2
(4.2a)
v = b0 + b1 x + b2 y + b3 xy + b4 x 2 + b5 y 2
(4.2b)
Algumas vezes, polinômios de ordem superior à terceira ordem são usados; entretanto,
estes polinômios podem introduzir erros piores àqueles a serem corrigidos, como será
visto posteriormente (Richards, 1993).
Os coeficientes a i e bi , em uma equação do primeiro grau, ou transformação afim no
plano, modelam: duas translações, duas rotações e dois fatores de escala, totalizando
seis parâmetros.
Se os coeficientes a i e bi são conhecidos, então, os polinômios de mapeamento podem
ser utilizados para relacionar qualquer ponto do mapa ao seu correspondente na
imagem. Quando não se conhecem estes coeficientes, estes podem ser estimados através
da identificação de conjuntos de feições no mapa, que também podem ser identificados
na imagem.
Estas feições, normalmente chamadas de pontos de controle, são feições possíveis de
ser identificadas de modo preciso na imagem e no mapa, como por exemplo o
cruzamento de estradas, intersecção de pistas de aeroportos, curvas de rios, etc. Um
número suficiente destes pontos são escolhidos, em pares - no mapa e na imagem, como
mostrado na Figura 4.1, de tal forma que os coeficientes do polinômio possam ser
estimados (Richards, 1993).
O número de Pontos de Controle (PC) mínimo para determinação de um polinômio de
grau n é dado pela seguinte regra:
90
N 0 PC ' s =
(n + 1).(n + 2)
2
(4.3)
n = grau do polinômio
Entretanto, a prática tem mostrado que o usuário deve escolher no mímimo 6 e 10
pontos para polinômios de primeiro e segundo grau, respectivamente, e de maneira que
os pontos fiquem bem espalhados dentro da área de trabalho. Isto permite que os
coeficientes sejam avaliados, utilizando-se o cálculo de mínimos quadrados, conforme
citado em Richards (1993).
4.1.2 - Reamostragem e interpolação
Supondo que os pontos localizados na imagem correspondam exatamente aos centros de
pixels no mapa, estes são simplesmente transferidos para as posições apropriadas na
grade que foi definida sobre o mapa. Este é o caso apresentado na Figura 4.2.
Como isto não ocorre normalmente, seguindo-se à transformação geométrica, atribuemse os níveis digitais à imagem registrada pelo processo de reamostragem por
interpolação. A reamostragem é necessária devido ao fato das coordenadas da imagem
processada (linha e coluna) não coincidirem com aquelas da imagem original. Três
técnicas podem ser utilizadas para este propósito.
MAPA
IMAGEM
Fig. 4.2 - Uso de polinômios de mapeamento para localizar pontos na imagem,
correspondentes às posições da grade definida sobre o mapa.
FONTE: adaptada de Richards (1993, p. 58).
91
REAMOSTRAGEM POR VIZINHO MAIS PRÓXIMO:
atribui ao valor de nível de cinza do pixel
da imagem corrigida o mesmo valor do nível de cinza do pixel que se encontra mais
próximo da posição a ser ocupada, como mostrado na Figura 4.3a. Não há alteração no
valor de nível de cinza.
INTERPOLAÇÃO BILINEAR:
faz com que o nível de cinza a ser atribuído ao pixel da
imagem corrigida seja determinado a partir do valor dos 4 pixels vizinhos, como
mostrado na Figura 4.3b. Como resultado, há alteração do valor do nível de cinza,
considerando a sua vizinhança. Maiores detalhes sobre esta interpolação podem ser
encontradas em Richards (1993).
INTERPOLAÇÃO POR CONVOLUÇÃO CÚBICA:
Esta técnica utiliza dezesseis pixels vizinhos
para o cálculo do valor de nível de cinza e, geralmente, produz uma imagem final com
aparência esmaecida (Richards, 1993). Vide Figura 4.3c.
92
valores de nível de
cinza dos pixels
valor de nível de
cinza utilizado
valor de nível de cinza
necessário para o pixel
do mapa
interpolação por convolução cúbica
interpolações por
convolução cúbica
do mapa
Fig. 4.3 - Determinação dos valores de nível de cinza por a) vizinho mais próximo, b)
interpolação bilinear e c) interpolação por convolução cúbica. i, j, etc são
valores discretos de u e v .
FONTE: adaptada de Richards (1993, p. 59).
4.1.3 - Escolha dos pontos de controle
Pares de pontos de controle bem definidos devem ser escolhidos para o registro de
imagens, a fim de assegurar que polinômios de mapeamento precisos sejam gerados.
Entretanto, deve-se atentar para a localização dos pontos selecionados. Uma regra geral
é que deve haver uma distribuição de pontos de controle em torno das bordas da
imagem a ser corrigida, com um espalhamento de pontos sobre toda a imagem
(Richards, 1993). Isto é necessário para assegurar que os polinômios de mapeamento
sejam bem comportados ao longo de toda a imagem.
93
Este conceito pode ser ilustrado através de um exemplo de ajuste de curva. Embora a
natureza do problema seja diferente, os efeitos indesejáveis que podem ser produzidos
são similares.
A Figura 4.4 mostra um conjunto de pontos de dados em um gráfico, no qual curvas de
primeira (linear), segunda e terceira ordem estão representadas. Nota-se que a medida
que a ordem é mais elevada, a curva passa mais próximo aos pontos. Entretanto,
supondo que os dados continuem para valores mais elevados de x, com quase a mesma
tendência dos pontos já plotados, então, o ajuste linear é o que melhor se adapta como
extrapolador. Em contraste, a curva de 3a ordem pode desviar-se visivelmente da
tendência dos pontos quando usada como extrapolador (Richards, 1993).
Isto também ocorre na geocodificação de imagens. Embora os polinômios de ordem
mais elevada possam ser precisos na vizinhança dos pontos de controle, podem conduzir
a erros significativos, e portanto a distorções na imagem, para regiões fora do alcance
dos pontos de controle (Richards, 1993).
Terceira ordem
Primeira ordem
Segunda ordem
Fig. 4.4 - Ilustração de curvas de ajuste para reforçar o comportamento potencialmente
pobre de funções matemáticas de ordem mais elevadas, quando usadas como
extrapoladoras.
FONTE: adaptada de Richards (1993. p. 61).
Em resumo, a geocodificação é uma transformação geométrica que relaciona as
coordenadas da imagem (linha e coluna) com, por exemplo, as coordenadas geográficas
94
(latitude e longitude) de um mapa. Essa transformação pode modelar as distorções
existentes na imagem, causadas no processo de sua formação, pelo sistema sensor e as
causadas por imprecisão dos dados de posicionamento da plataforma (aeronave ou
satélite).
Usando a técnica de correção descrita, uma imagem pode ser geocodificada a um
sistema de coordenadas de um mapa, e, portanto, ter seus pixels acessíveis em termos
das coordenadas deste mapa (latitudes e longitudes ou eastings e northings), ao invés de
números de linha e coluna.
A necessidade de fazer a geocodificação de imagens existe principalmente quando se
deseja combinar imagens de diferentes sensores (HRV e TM, por exemplo) de uma
mesma área, ou imagens de um mesmo sensor adquiridas em diferentes datas (multitemporais), a fim de comparar as mudanças ocorridas. Outro exemplo comum de
necessidade da geocodificação é na confecção de mosaicos a partir de imagens
adjacentes de uma área.
No caso deste trabalho, esta necessidade se faz presente em virtude do fato de que se
deseja retirar algumas das possíveis distorções que possam existir nas imagens de
sensores de radares orbitais.
4.2 - Registro de imagens SAR
O sucesso no registro entre imagens SAR depende do grau de similaridade entre elas,
desse modo imagens não similares são difíceis de ser registradas com precisão. O grau
de similaridade depende, por sua vez, do ângulo de incidência local, ângulo de visada
do radar, época das aquisições, do número de looks, do formato do dado (amplitude ou
potência), da resolução geométrica e do ruído Speckle (INPE, [199-], b).
Quando as imagens cobrem um terreno plano, as diferenças geométricas entre elas
podem ser removidas sistematicamente, obtendo-se um casamento com alto grau de
precisão.
95
Quando as imagens cobrem um terreno montanhoso as dificuldades aumentam bastante,
principalmente entre imagens obtidas com ângulos de visada diferentes, pois a
localização das bordas nas imagens muda de uma para a outra, devido, principalmente, a
diferenças de sombras e inversões (layover) entre elas (INPE, [199-], b).
Imagens pertencentes a órbitas ascendentes e descendentes apresentam grandes
diferenças na direção de visada (look direction), esperando-se um casamento pobre
entre elas, principalmente em regiões montanhosas.
No caso de se efetuar o registro entre imagens SAR, ou entre estas e imagens óticas, o
ruído speckle deve ser filtrado apropriadamente, de maneira a preservar as bordas, para
uma melhor localização dos pontos de controle (INPE, [199-], b).
Uma técnica de registrar imagens a partir dos dados brutos é mostrada por Fernandes
(1998). Esta técnica consiste em gerar, a partir dos dados brutos e do conhecimento da
trajetória dos sensores, duas imagens já co-registradas, atuando no processador que
sintetiza as imagens.
Outra técnica é apresentada por Maranhão e Getino (1998), onde o registro das imagens
é feito com técnicas de interpolação no domínio espectral.
96
CAPÍTULO 5
ORTO-RETIFICAÇÃO DE IMAGENS
Apesar da habilidade do SAR em fornecer imagens da superfície da Terra em quaisquer
condições de tempo, existem algumas características negativas das imagens resultantes
que devem ser consideradas. Dentre estas, talvez a mais marcante seja a modificação
das relações geométricas dentro da imagem. Por exemplo, as imagens em formato
ground-range não respeitam as relações espaciais como elas ocorrem na realidade.
Entretanto, esta situação pode ser melhorada pela implementação de um processo de
correção destas imagens, que considera as variações de elevação dentro da cena
imageada, denominado orto-retificação.
Segundo Toutin (1995) inúmeros estudos foram realizados a fim de desenvolver um
modelo matemático que descrevesse a geometria de aquisição relacionada a diferentes
tipos de imagem (visível, infravermelho e SAR) e plataformas (orbitais e
aerotransportadas).
Este modelo de correção geométrica foi originalmente desenvolvido para o SPOT-HRV
e testado com os dados do Landsat-TM, MOS-MESSR, SEASAT-SAR e com dados
SAR aerotransportados (Toutin, 1995). Este mesmo modelo foi incorporado ao software
PCI através do módulo SMODEL, para o cálculo do modelo matemático, que juntamente
com o módulo
SRORTHO
é utilizado para orto-retificar a imagem com o modelo digital
de elevação. Este foi o software utilizado para a orto-retificação das imagens de radar
avaliadas neste trabalho.
A correção geométrica de imagens SAR utilizando o processo de orto-retificação
reveste-se da maior importância, uma vez que o método de correção geométrica de
imagens com o uso de pontos de controle corrige as distorções localmente (nestes
pontos) e não leva em conta as elevações do terreno, que é a maior fonte de distorções
(Toutin, 1995).
97
A orto-retificação consiste de um método que permite, com o uso de um
MDE
(modelo
digital de elevação), a geração de orto-imagens e mosaicos de dados multifontes (dados
de radar e ópticos, tanto aerotransportados como orbitais) com uma exatidão geométrica
em torno de um pixel. Este tipo de correção geométrica é regida por uma
fundamentação matemática que leva em consideração as diferentes distorções relativas à
geometria global de visada (sensor-plataforma-Terra), isto é:
•
Distorções relativas à plataforma (posição, velocidade e orientação);
•
Distorções relativas ao sensor (ângulo de orientação, campo de visada
instantâneo, tempo de integração);
•
Distorções relativas à Terra (geóide-elipsóide incluindo elevação) e;
•
Distorções relativas à projeção cartográfica (elipsóide-plano cartográfico).
Assim sendo, o módulo
SMODEL
do software PCI calcula o modelo matemático
necessário para a orto-retificação das imagens, a partir dos dados da órbita e atitude do
satélite e de pontos de controle no terreno (GCP’s). O modelo permite que os pontos de
controle sejam examinados e modificados, alterando o resultado final do modelo.
A Figura 6.6 apresenta as etapas que foram necessárias para a orto-retificação das
imagens SAR
1a ETAPA
2a ETAPA
Dados de
efeméride dos
satélites
Imagem SAR
completa
Pontos de
Controle
Modelo do
Satélite
Modelo Digital
de Elevação
IMAGEM SAR
ORTO -RETIFICADA
RESULTADO FINAL
Fig. 6.6 – Etapas para orto-retificação de Imagens de Radar.
98
O processo de orto-retificação utilizando um modelo de correção geométrica tem dois
componentes principais: a aquisição dos dados (imagem, dados de efemérides do
satélite e pontos de controle) que permitem o cômputo do modelo matemático
necessário para a orto-retificação da imagem e a orto-retificação da imagem
propriamente dita com um modelo digital de elevação.
•
Modelo do Satélite
Três fontes de informação são necessárias para o cálculo do modelo do satélite
(“satellite model”), 1a etapa da Figura 6.6: a imagem SAR completa, os dados de
efemérides do satélite e os pontos de controle com coordenadas definidas pelo usuário.
Os dados de efemérides são fornecidos no cabeçalho (“header”) da imagem e incluem
informações sobre o modelo da Terra, sobre a órbita e sobre o sensor.
Para este trabalho, o modelo da Terra foi baseado no elipsóide UGGI-67, que é um
elipsóide local para a América do Sul, com ponto de amarração situado no vértice Chuá
em Minas Gerais. Este é o elipsóide usado pelo datum horizontal5 SAD-69.
Quanto aos pontos de controle o modelo requer um mínimo de 4 a 7 pontos de controle
para imagens ópticas e SAR respectivamente. Entretanto, se estes não forem muito
precisos deve-se utilizar um mínimo de 6 a 12 pontos de controle respectivamente (PCI,
1997).
Para melhorar a precisão do modelo matemático os pontos de controle devem ser
distribuídos ao longo de toda a imagem, incluindo as bordas da imagem, com diferentes
valores de elevação.
Este modelo exige o uso de toda a imagem SAR, ou seja, estas não podem ser cortadas a
fim de conter somente a área de estudo. Outra exigência do modelo é de que as imagens
não sofram qualquer tipo de correção radiométrica, como por exemplo filtragem do
5
Datum Horizontal é o sistema de coordenadas terrestres, referenciadas a um determinado elipsóide.
Estas coordenadas podem ser geográficas, cartesianas ou planas (quando se utiliza um sistema de
projeção como, por exemplo, o UTM), Kennedy, 1996.
99
ruído speckle. Assim sendo, para a orto-retificação as imagens também não podem
sofrer qualquer tipo de correção prévia.
Essencialmente, o modelo do satélite considera e integra toda a geometria de visada do
satélite (velocidade e posição), o sensor (orientação, ângulo e horário de aquisição), a
Terra (curvatura, rotação e elevação) e a projeção cartográfica. Embora alguns destes
parâmetros (e.g. a velocidade do satélite, orientação do sensor e curvatura da Terra)
sejam normalmente corrigidos pelos algoritmos do processador SAR, este modelo
assume e corrige a presença de alguns erros residuais (Toutin, 1995).
De posse destes dados é calculado o modelo matemático, o qual fornece os erros
residuais RMS para cada imagem a ser orto-retificada. O erro em metros para cada
ponto é calculado como se segue:
Erro em X = coordenada X do GCP (inserida) – coordenada X calculada pelo modelo.
Erro em Y = coordenada Y do GCP (inserida) – coordenada Y calculada pelo modelo.
Portanto, um erro residual positivo em X significa que o ponto deve ser movido para a
direita na imagem e um erro residual positivo em Y significa que o ponto deve ser
movido para cima na imagem.
Maiores informações sobre este método, ou seja, o módulo “SMODEL”, podem ser
obtidas nos seguintes trabalhos: Toutin, (1985); Toutin (1995); Cheng & Toutin (1995).
•
Modelo Digital de Elevação
Os valores de altura fornecidos pelo Modelo Digital de Elevação são extremamente
relevantes para o processo de orto-retificação. Isto se deve ao fato de que as distorções
dentro de uma imagem SAR são proporcionais às mudanças de elevação do terreno
(Duncan et al., 1995). A magnitude da distorção é descrita pelo Fator de Escala
Topográfica6, o qual quantifica o relacionamento entre a geometria de visada e o
terreno. Desta forma, o Modelo Digital de Elevação é uma ferramenta fundamental no
100
procedimento de correção, na medida que fornece a informação de elevação em cada
ponto da imagem.
Embora a geometria de visada efetiva varie com a elevação do terreno, generalizações
podem ser feitas com respeito ao ângulo de incidência e os níveis de distorção
resultantes.
Assim, uma vez que o processo de orto-retificação leva em consideração as distorções
causadas pela elevação, foi necessário a utilização de um modelo digital de elevação
(MDE) para a obtenção de uma imagem orto-retificada mais exata.
A resolução e a fidelidade topográfica do MDE refletem-se diretamente na imagem
orto-retificada devendo-se esperar que a imagem orto-retificada apresente um erro
planimétrico igual ao dobro do erro altimétrico do MDE utilizado (Adam et al., 1997).
•
Módulo SRORTHO
O módulo SRORTHO “satellite radar ortho image generation” tem por finalidade a ortoretificação de imagens SAR orbitais utilizando dados de elevação e o modelo gerado
pelo módulo
SMODEL,
permitindo também a aplicação de um filtro redutor de speckle
durante a reamostragem.
Durante a reamostragem este módulo utiliza o método do vizinho mais próximo a fim
de encontrar a coordenada na imagem de entrada e então aplica o filtro selecionado nos
pixel vizinhos a fim de encontrar o valor filtrado. Isto reduz a quantidade de
reamostragens entre a imagem de entrada e a imagem de saída (PCI, 1997).
Os filtros podem ser: Gamma, Enhanced Frost, Enhanced Lee or Median com tamanho
mínimo de 3x3 e máximo de 7x7. O filtro utilizado durante este processo para todas as
imagens foi o Enhanced Frost com janela de 5x5.
6
Informações mais detalhadas sobre o Fator de Escala Topográfica pode ser visto no Capítulo 3, item
3.2.3.
101
Para a obtenção de resultados mais precisos os dados de elevação devem ser um Modelo
Digital de Elevação geocodificado; entretanto, caso isto não seja possível pode-se
especificar um valor de elevação constante que represente a elevação média para a
imagem, ou ainda orto-retificar a imagem assumindo que toda a imagem tem um valor
de elevação igual a zero.
Maiores informações sobre este método, ou seja, o módulo “SRORTHO”, podem ser
obtidas nos seguintes trabalhos: Toutin (1985); Toutin & Carbonneau (1989).
Devido a importância do Modelo Digital de Elevação para o processo de ortoretificação, a seguir será apresentada uma revisão bibliográfica sobre este tema.
Um modelo numérico de terreno - MNT (em inglês, DTM = Digital Terrain Model) é
uma representação da distribuição espacial de uma grandeza física associada a uma
superfície. A superfície é em geral contínua e o fenômeno que representa pode ser
variado. Segundo Weibel e Heller (1991) cita-se a seguir alguns usos do MNT:
•
Armazenamento de dados de altimetria para gerar mapas topográficos;
•
Análises de corte-aterro para projetos de estradas e barragens;
•
Elaboração de mapas de declividade e exposição, para apoio e análise de
geomorfologia e erodibilidade;
•
Análise de variáveis geofísicas e geoquímicas;
•
Apresentação tridimensional (em combinação com outras variáveis).
Para a representação de uma superfície real no computador é indispensável a elaboração
e criação de um modelo digital, que pode estar representado por equações analíticas ou
por uma rede (grade) de pontos, de modo a transmitir ao usuário as características
espaciais do terreno. Normalmente um MNT é criado na forma de uma grade de pontos
regulares ou irregulares.
Os modelos digitais de elevação que utilizam grades regulares retangulares são
amplamente utilizados nos sistemas de informação geográfica. A popularidade deste
102
modelo se deve à facilidade de geração e manipulação dos dados, por utilizar uma
matriz como estrutura de armazenamento.
As grades regulares retangulares são adequadas para superfícies suaves e de variação
contínua. Quando a superfície tem grandes variações ou descontinuidades, estas
estruturas apresentam deficiências. As descontinuidades na superfície ocorrem ao longo
de linhas, em geral conhecidas por linhas de quebra (linhas de falha, linhas de vale e
linhas de crista), que permitem caracterizar esta superfície. Devido a esta propriedade,
as linhas de descontinuidade são chamadas também de linhas características
(Namikawa, 1995).
Um modelo mais adequado do que o que utiliza grades regulares retangulares é o
modelo de grade irregular triangular, pois oferece a possibilidade de modelar as
superfícies, preservando as linhas de quebra.
Alguns autores argumentam que o termo
MODELO DIGITAL DE ELEVAÇÃO
Digital Elevation Model - DEM), deveria ser utilizado no lugar de
DE TERRENO,
(em inglês,
MODELO NUMÉRICO
quando se deseja representar somente o relevo (Weibel e Heller, 1991).
Uma vez que o fenômeno que se deseja modelar neste trabalho é o relevo, o termo
MODELO DIGITAL DE ELEVAÇÃO será
o utilizado daqui em diante.
O processo de modelagem digital da elevação consiste basicamente das fases de
aquisição dos dados, geração de grades (ou do modelo) e de aplicação (ou elaboração de
produtos).
Na fase de aquisição de dados, informações representando a distribuição do fenômeno
são coletadas por meio de amostras. Cada amostra é composta de uma posição e pelo
valor do fenômeno sobre esta posição. Por exemplo, para o sistema de coordenadas
cartesiano
XYZ,
a posição pode ser representada pelo par de coordenadas
XY,
e o valor
do fenômeno por Z.
O agrupamento dos dados em estruturas internas que maximizam a geração de
resultados compõe a fase de geração do modelo. As estruturas normalmente utilizadas
103
são a grade regular retangular e a grade irregular triangular. Cada estrutura tem suas
vantagens e desvantagens e são selecionadas segundo a aplicação desejada.
Na fase de aplicação, obtêm-se resultados utilizando o modelo gerado. Estes resultados
podem ser qualitativos, como a visualização da superfície por meio de uma projeção, ou
quantitativos, como o cálculo de volumes; ou seja, a partir dos modelos (grades) podese calcular diretamente:
•
Volumes, áreas, desenhar perfis e secções transversais, gerar imagens
sombreadas ou em níveis de cinza, gerar mapas de declividade e aspecto, gerar
fatiamentos nos intervalos desejados e perspectivas tridimensionais.
Para a obtenção desses resultados, algum método de ajuste de superfície pode ser
necessário para determinar valores de elevação em posições diferentes daquelas para os
quais os modelos têm valores definidos explicitamente.
A seguir, apresenta-se uma análise dos modelos de grade regular retangular e de grade
irregular triangular, suas vantagens e desvantagens.
5.1 - Modelos de Grade
O processo de modelagem utiliza estruturas de grades para representar a informação de
elevação sobre a superfície do fenômeno.
As grades são formadas por uma malha de polígonos que cobrem toda a área de
interesse da superfície. Cada polígono modela a superfície contida em seu interior. A
diferença básica entre as grades regulares e as grades irregulares triangulares deve-se a
forma dos polígonos. Em uma grade regular os polígonos têm a mesma forma e
tamanho, geralmente um retângulo, definindo a forma de grade regular mais utilizada, a
grade regular retangular. Os polígonos na grade irregular triangular têm a mesma forma,
triangular, mas seus tamanhos são diferentes.
104
5.1.1 - Grades Regulares Retangulares
A grade retangular ou regular é um modelo digital que aproxima superfícies através de
um poliedro de faces retangulares. Os vértices desses poliedros podem ser os próprios
pontos amostrados caso estes tenham sido adquiridos nas mesmas localizações
XY
que
definem a grade desejada, mas isto raramente acontece. Em geral, algum método de
interpolação é necessário para estimar o valor de elevação nos vértices do poliedro. A
Figura 5.1 apresenta um exemplo de superfície e a grade regular correspondente.
Fig. 5.1 - Superfície e grade regular correspondente no espaço tridimensional XYZ.
FONTE: adaptada de Namikawa (1995, p. 6)
A estrutura de armazenamento da grade regular é formada por uma matriz de valores de
elevação e por um descritor que define as coordenadas
XY
de um ponto da grade,
geralmente em um dos extremos da superfície, e pelos espaçamentos entre os pontos nas
direções X e Y.
O armazenamento em uma estrutura matricial simplifica a manipulação das grades
regulares. Neste tipo de estrutura, pode-se obter facilmente o valor de elevação em uma
dada posição, utilizando-se o índice da matriz. Este índice pode ser calculado em função
105
das coordenadas de um dos extremos da grade e dos espaçamentos. No entanto, este
mesmo tipo de estrutura gera informações redundantes em regiões onde a superfície tem
pouca variação e, ao mesmo tempo, falta de informação em áreas de grande variação.
Este problema pode ser minimizado com a escolha cuidadosa dos valores de
espaçamento entre os pontos da grade (Namikawa, 1995).
Esta escolha deve considerar o tipo de superfície a ser modelada e a confiabilidade que
se espera do modelo. Porém, em superfícies muito heterogêneas, com regiões de grande
variação e regiões planas ou quase planas, ou com descontinuidades na superfície, como
as linhas de drenagem, as linhas de crista e as falhas geológicas, nem mesmo a escolha
criteriosa permite modelar a superfície com o grau de confiabilidade desejado
(Namikawa, 1995).
O espaçamento da grade, ou seja, a resolução em X ou Y, deve ser idealmente menor ou
igual a menor distância entre duas amostras com cotas diferentes. Ao se gerar uma
grade muito fina (densa), ou seja, com distância muito pequena entre os pontos, existirá
um maior número de informações sobre a superfície analisada, necessitando-se, porém,
de um maior tempo para sua geração. Ao contrário, considerando-se distâncias grandes
entre os pontos, será criado uma grade grossa que poderá ocasionar perda de
informação. Desta forma, para a resolução final da grade também deve haver um
compromisso entre a precisão dos dados e do tempo de geração desta (INPE, [199-], a).
A geração de grade regular ou retangular deve ser efetuada quando os dados amostrados
na superfície não são obtidos com espaçamento regular. Assim, a partir das informações
contidas em isolinhas ou em pontos amostrados, gera-se uma grade que represente de
maneira mais fiel possível a superfície (INPE, [199-], a).
A limitação do uso de isolinhas como representação de uma superfície deve-se ao fato
da isolinha ser fiel à superfície apenas ao longo da própria isolinha. A região entre duas
isolinhas é apenas deduzida e, se a superfície não tiver um comportamento que pode ser
estimado através das isolinhas que contornam a região, a superfície será apenas
aproximada através de processos de interpolação. A figura 5.2 mostra um exemplo de
mapa de isolinhas, com alguns pontos amostrados.
106
Fig. 5.2 - Exemplo de mapa de isolinhas com alguns pontos amostrados.
FONTE: adaptada de Namikawa (1995, p. 8)
A aquisição das isolinhas pode ser efetuada por meio de digitalização manual, com o
uso de uma mesa digitalizadora, ou através de um processo automático, por meio de um
scanner.
Quanto aos pontos espaçados irregularmente, obtidos em pesquisas de campo, podem
ser distribuídos de forma semi-regular ou totalmente irregular. A distribuição semiregular ocorre quando as amostras são obtidas ao longo de linhas previamente definidas
como as linhas de vôo em aerofotogrametria, as redes de drenagem, estradas e outras
vias de acesso que facilitam o trabalho de campo. A distribuição totalmente irregular é
obtida quando se utilizam levantamentos já existentes, ou quando a localização dos
pontos é aleatória (Namikawa, 1995).
Definidos os espaçamentos e as coordenadas de cada ponto da grade, pode-se aplicar
um método de interpolação para calcular o valor estimado da elevação em cada ponto da
grade regular. Os métodos de interpolação mais utilizados são:
107
Vizinho mais Próximo - para cada ponto (X, Y) da grade o sistema atribui a cota da
amostra mais próxima ao ponto. Este interpolador deve ser usado quando se deseja
manter os valores de cotas das amostras na grade sem gerar valores intermediários.
Vizinhos mais Próximos - o valor de cota de cada ponto da grade é estimado a partir da
média simples das cotas dos n vizinhos mais próximos desse ponto. Este interpolador é
geralmente utilizado quando se requer maior rapidez na geração da grade.
Vizinhos mais Próximos, considerados por Quadrante - É considerada uma amostra
por quadrante (total de 4 amostras) e o número de pontos amostrados é igual para cada
um dos quadrantes. Sugere-se a utilização deste interpolador quando as amostras são
todas do tipo ponto.
Vizinhos mais Próximos, considerados por Quadrante e cota - Além da restrição de
quadrante do método anterior, existe a restrição de número limitado de amostras por
valor de elevação.
Pode-se ainda obter uma nova grade regular a partir de uma grade retangular anterior já
elaborada, ou seja, realizar um refinamento da grade existente, que consiste em diminuir
o espaçamento entre os pontos da grade, adensando-a. Estes pontos internos ao retalho
apresentam valor de cota Z da nova grade estimados através dos interpoladores bicúbico
e bilinear.
O refinamento bicúbico, apesar de ser mais lento computacionalmente que o bilinear,
fornece resultados mais interessantes pois ele garante continuidade de primeira e
segunda ordem entre as funções que representam cada célula do modelo. Desta forma a
superfície resultante é suave nos pontos da grade e também ao longo dos segmentos que
formam os retângulos ou seja, a grade é mais suave e cada retalho da grade é contínuo e
suave em relação aos seus vizinhos (INPE, [199-], a).
O refinamento bilinear é um método mais rápido computacionalmente, em relação ao
interpolador bicúbico. Sua maior desvantagem é a produção de superfícies pouco
108
suavizadas. Portanto, deve ser usado quando não se precisa de uma aparência suave da
superfície.
5.1.2 - Grades Irregulares Triangulares
Na modelagem da superfície por meio de uma grade irregular triangular, cada polígono
que forma uma face do poliedro é um triângulo. Os vértices do triângulo são, em geral,
os pontos amostrados da superfície. A grade irregular triangular deve ser armazenada
em uma estrutura que permita a fácil recuperação dos triângulos e das relações de
vizinhança entre eles. Uma estrutura eficiente para o armazenamento da grade irregular
triangular deve evitar redundâncias de elementos básicos, como pontos e linhas. Os
elementos básicos devem ser armazenados somente uma vez e ligados aos triângulos
que os contém por meio de ponteiros. A Figura 5.3 apresenta um exemplo de superfície
com a estrutura triangular associada.
Fig. 5.3 - Superfície e grade irregular triangular correspondente.
FONTE: adaptada de Namikawa (1995, p. 12)
As grades irregulares triangulares utilizam os próprios pontos de amostra para modelar a
superfície, não sendo necessário o procedimento de estimativa utilizado na geração da
grade regular.
Em uma grade irregular triangular os pontos de amostra estão conectados formando uma
triangulação. Esta triangulação pode ser definida como o grafo planar construído sobre
109
N pontos (os vértices do triângulo), de um espaço tridimensional XYZ, projetados no
espaço bidimensional XY e unidos por segmentos de reta (as arestas dos triângulos) que
não se interceptam (Namikawa, 1995).
Para a representação de uma superfície por meio de triangulação, pode-se considerar
que aquela na qual as distâncias entre os pontos amostrados são as menores possíveis é
a melhor. A consideração é baseada no fato de uma superfície interna a um dos retalhos
triangulares ser dependente apenas dos pontos mais próximos a ele. A triangulação
conhecida como triangulação de Delaunay pode ser considerada uma aproximação da
triangulação que satisfaz esta restrição (Namikawa, 1995).
Durante a geração de grades triangulares com linhas de quebra, estas são incorporadas à
triangulação, constituindo arestas de triângulos. O modelo final, ou seja, a grade
irregular triangular, terá estas informações adicionais de linha de quebra incorporadas,
possibilitando assim uma representação mais fiel do terreno, uma vez que não suaviza
feições como vales e cristas (INPE, [199-], a).
O método sem linhas de quebra realiza a triangulação sem considerar as linhas de
quebra, resultando em um modelo de terreno suavizado também ao longo das linhas de
quebra.
Apesar da complexidade dos procedimentos e dos requisitos de espaço de
armazenamento, as grades irregulares triangulares são utilizadas quando se deseja
modelar a superfície de maneira mais precisa, ou quando a superfície modelada é
utilizada para a obtenção de dados quantitativos. As grades regulares podem ser
utilizadas quando o requisito de qualidade é baixo, como em aplicações de geração de
visualização da superfície (Namikawa, 1995).
Pelos motivos acima expostos, o modelo digital de elevação da área de estudo foi obtido
a partir de uma grade triangular tipo Delanay, sem quebra de linha, conforme será
apresentado no Capítulo 6.
110
CAPÍTULO 6
MATERIAIS E MÉTODOS
Neste capítulo são descritos os procedimentos metodológicos, bem como os materiais
que foram empregados para a análise da qualidade geométrica dos dados do satélite
RADARSAT e JERS-1.
Visto que as Imagens do RADARSAT foram disponibilizadas através do Programa
ADRO, a seguir é apresentada uma breve descrição deste programa, segundo Paradella
et al. (1996).
O Programa ADRO, lançado em fins de 1994, foi concebido pela Agência Espacial
Canadense (CSA), NASA e Radarsat International Inc. (RSI), como um anúncio de
oportunidades para a avaliação do RADARSAT. Em torno de 500 propostas foram
recebidas até Maio e 1995, envolvendo a avaliação do RADARSAT através de
experimentos
científicos,
desenvolvimento
de
aplicações,
desenvolvimento
e
demonstração de produtos especiais, no contexto de explorar as características
inovadoras do SAR canadense em vários campos de aplicações ambientais.
A proposta do INPE (Proposta 364 – “Development of RADARSAT Applications in
Brazilian Amazon”) foi aprovada pela CSA em Dezembro de 1995 e tem como objetivo
principal a avaliação do desempenho do RADARSAT, sob modos distintos de aquisição
e configuração, em diferentes condições e ambientes fisiográficos da Amazônia
Brasileira. Os seguintes temas de aplicação foram priorizados: Geologia; Uso da Terra;
Áreas Inundadas (Planície de inundação); Impacto Ambiental em reservatórios;
Inventário de Floresta Tropical; Desflorestamento e Dinâmica do Solo e Detecção de
Mudanças em Floresta Tropical.
6.1 - Materiais
•
Cartas topográficas do IBGE, folhas SC.20-X-C-IV (Rio Preto do Crespo) e
SC.20-X-C-V (Oriente Novo), na escala 1:100.000;
111
•
Cartas topográficas da Diretoria de Serviço Geográfico (DSG), folhas
(Nova Vida) e SC.20-Z-A-II (Jaru), na escala 1:100.000;
•
Estação de trabalho SUN, do INPE;
•
Dois receptores GPS GARMIN 100 SURVEY II, da Garmim Corporation;
•
Imagem do LANDSAT TM órbita - ponto 231/67, adquirida em 08 de Junho de
1998, fornecida pelo INPE;
•
Uma Imagem do satélite canadense RADARSAT, adquirida em 07 de Setembro de
1997, órbita ascendente, tipo SGF, no modo S3, em ground-range e no formato
Path image;
•
Uma Imagem do satélite canadense RADARSAT, adquirida em 04 de Julho de
1997, órbita ascendente, tipo SGF, no modo S2, em ground-range e no formato
Path image;
•
Uma imagem do satélite canadense RADARSAT, adquirida em 19 de agosto de
1996, órbita ascendente, tipo SGF, no modo S3, em ground-range e no formato
Path image;
•
Uma do satélite japonês JERS-1, adquirida em 28 de Maio de 1996, órbita
descendente, nível de processamento 2.1;
•
Uma do satélite japonês JERS-1, adquirida em 11 de Julho de 1996, órbita
descendente, nível de processamento 2.1;
•
Impressora com resolução de 600 dpi;
•
Microsoft Word 7.0 e Exel 7.0;
•
Sistema de informações geográficas (SGI), desenvolvido pela Divisão de
Processamento de Imagens (DPI) do INPE;
•
Software IDL-ENVI versão 3.0, da Research Systems, Inc.;
•
Software PCI versão 6.2, da PCI Remote Sensing Corporation;
•
Software SPRING, desenvolvido pela Divisão de Processamento de Imagens (DPI)
do INPE; e
•
MSTAR GPS Software, da Magellan Systems Corporation.
SC.20-Z-A-I
6.2 - Área de estudo
A área de estudo foi escolhida na região de Ariquemes – RO, em função da relativa
facilidade de acesso aos locais onde se encontravam os pontos de controle, que são
pontos bem visíveis nas imagens de radar, os quais foram adquiridos com GPS.
112
A área de estudo compreende uma região delimitada pelas seguintes coordenadas:
9º35'S/62º05'W, 10º17'S/63º00'W, municípios de Ariquemes, Jaru e Cacaulândia. A
Figura 6.1 ilustra a localização da área de estudo.
Fig. 6.1 - Localização da área de estudo.
6.2.1 - Características da área de estudo
GEOMORFOLOGIA:
Segundo descrição do Projeto RADAMBRASIL (1978), esta região
possui um relevo denominado de Depressão Interplanáltica da Amazônia Meridional,
apresentando uma altimetria média de 200 metros, e caracterizando-se por constituir
uma superfície rebaixada, entalhada por uma drenagem incipiente que proporciona uma
dissecação do relevo em colinas ou relevos de topo convexo, separados por vales. Em
meio à área dissecada, alguns conjuntos de feições configurando cristas se sobressaem,
determinando os relevos de topo contínuo e aguçado. O rio Ji-Paraná ou Machado
113
apresenta inúmeras cachoeiras e corredeiras, evidenciando pequenos desníveis no
terreno.
Observa-se, ainda, a ocorrência do relevo denominado Planalto dissecado Sul da
Amazônia, unidade bastante fragmentada devido à intensidade de dissecação, sendo
predominante os relevos dissecados em cristas com vertentes muito pronunciadas, que
se comportam como relevos residuais.
USO DA TERRA:
A área de estudo é ocupada, principalmente, por propriedades de porte
médio (500 a 1000 hectares), voltadas para a atividade agropastoril (a criação de gado é
realizada em pastos plantados e pastos naturais), tendo regiões com padrão de espinha
de peixe, com propriedades da ordem de 100 hectares. Existem, ainda, na região
algumas fazendas de maior porte (5000 ou mais hectares).
114
6.3 – Organização do trabalho
A Figura 6.2 apresenta um fluxograma contendo os principais passos executados
durante a realização deste estudo.
SELEÇÃO DA ÁREA DE ESTUDO
Trabalho de Campo
Processamento dos Dados de Campo
Processamento das Imagens de Radar
Geocodificação das
Imagens de Radar
Avaliação da Qualidade
Geométrica das Imagens
SAR Geocodificadas
Orto-retificação das
Imagens de Radar
Avaliação da Qualidade
Geométrica das Imagens
SAR adquiridas
Cálculo da Exatidão Absoluta e
Relativa das Imagens SAR
Geocodificadas
Avaliação da Qualidade
Geométrica das Imagens
SAR Orto-retificadas
Cálculo da Exatidão Absoluta e
Relativa das Imagens SAR
Orto-retificadas
Fig. 6.2 – Fluxograma das principais etapas do trabalho.
115
A Figura 6.3 abaixo ilustra as etapas que foram realizadas anteriormente ao trabalho de
campo.
DEFINIÇÃO DA ÁREA
DE ESTUDO
Pedido das Imagens
SAR e Landsat TM
Recebimento e
leitura dos dados
PRÉ-PROCESSAMENTO DAS IMAGENS
Correção Radiométrica de 01
Imagem SAR (Filtragem)
Correção Geométrica da
Imagem TM
Seleção dos Pontos de
Controle (campo)
REALIZAÇÃO DO
TRABALHO DE
Fig. 6.3 – Etapas anteriores ao trabalho de campo.
6.4 - Trabalho de campo
O trabalho de campo foi conduzido com a finalidade de obter-se pontos cujas
coordenadas (latitude, longitude e altitude) fossem as mais exatas possíveis, ou seja,
apresentassem erros menores do que o espaçamento entre pixels das imagens (12,5
metros), de forma a serem utilizadas na fase de geocodificação e orto-retificação das
imagens de radar.
116
A escolha dos pontos foi feita através do uso de duas imagens, uma de radar
(RADARSAT, adquirida em 07 de Setembro de 1997) e outra do Landsat TM, do ano
de 1998, previamente geocodificada com a utilização de pontos de controle adquiridos a
partir de uma carta topográfica da região na escala de 1:100.000, de forma que os
pontos selecionados fossem facilmente identificados em ambas as imagens.
A imagem Landsat TM em questão foi utilizada durante o trabalho de campo a fim de
auxiliar na identificação dos pontos no terreno. Foram adquiridos um total de 48
pontos, na região de interesse, com o uso de um par de receptores GPS GARMIN 100
SURVEY II.
Visto que para a aquisição das coordenadas de um ponto (latitude, longitude e altitude)
são necessários um mínimo de 04 (quatro) satélites, com um posicionamento favorável
em relação ao receptor, antes da realização do trabalho de campo foi realizado um
estudo, a fim de determinar o número de satélites disponíveis na área de estudo, nos dias
em que seriam realizadas as aquisições dos pontos de controle, e a diluição de precisão
dos dados GPS.
A diluição de precisão nos fornece a precisão da posição absoluta calculada. Quanto
maior o número DOP, que varia de 1 a 10, pior a precisão da posição calculada pelo
receptor.
Com esta avaliação evita-se a realização do trabalho de campo em dias inadequados, ou
a aquisição de pontos em horários em que não haja cobertura suficiente de satélites ou
alto DOP. O resultado deste estudo pode ser visto no Apêndice D.
O tempo de aquisição para cada ponto estático foi de no mínimo 12 minutos, com
intervalo de amostragem de 1 em 1 segundo, ou seja, a cada 1 segundo o receptor
gravava as coordenadas do ponto em questão. O valor DOP utilizado para o
processamento diferencial de cada ponto foi 5 (cinco).
117
Também foram adquiridas algumas feições lineares do terreno (estradas), operando-se o
GPS em modo dinâmico de aquisição, a fim de serem utilizadas, visualmente, na
avaliação da qualidade geométrica das Imagens SAR geometricamente corrigidas.
6.5 - Metodologia
Para atingir os objetivos propostos neste trabalho, as etapas descritas na Figura 6.2
foram executadas conforme descrito a seguir.
6.5.1 - Processamento dos dados de campo
Após a realização do trabalho de campo, os dados adquiridos com os receptores GPS
foram transferidos para um computador e, com o uso do software que acompanha os
referidos receptores, foram convertidos para o formato RINEX (“Receiver Independent
Exchange Format”), que é um formato utilizado para padronização deste tipo de dados,
visando sua manipulação por outros softwares de processamento de dados GPS.
A finalidade da conversão dos dados para este formato deveu-se ao fato de que o
software que acompanha o receptor GARMIN não permitia o cálculo das estatísticas
relativas a cada ponto, como, por exemplo, os erros de posicionamento em X,Y e Z.
Após convertidos, os dados foram lidos e processados com a utilização do software que
acompanha os receptores Magellan GPS ProMark X e Magellan GPS ProMark X-CP,
obtendo-se, assim, as estatísticas de cada ponto estático adquirido.
O método de processamento diferencial aplicado, a fim de obter-se as coordenadas de
cada ponto com a maior exatidão possível, foi o método diferencial pós-processado7.
Após este processamento, foi efetuado o cálculo de distâncias lineares entre todos os
pontos coletados. Também foram selecionados ângulos, formados por cada conjunto de
7
O método de Posicionamento diferencial é aquele em que posições absolutas, obtidas por um receptor
móvel, são corrigidas por um outro receptor fixo, estacionado num ponto de coordenadas de referência.
Neste processo, são eliminados quase que totalmente, os erros de posicionamento do ponto.
118
três pontos, de forma que estes ficassem distribuídos ao longo da direção transversal das
imagens de radar (“cross-track direction”).
Os resultados assim obtidos foram utilizados como verdade de campo, a serem
comparados com os dados de distância linear e ângulos adquiridos a partir das imagens
de radar.
6.5.2 – Processamento das Imagens de Radar
A primeira etapa do processamento das imagens de radar foi a correção radiométrica. A
correção radiométrica é uma das etapas do processamento digital de imagens de radar
que visa basicamente a aplicação de filtros e a correção do efeito do padrão da antena
APC (Antenna Pattern Correction). Não foi necessária a execução da correção APC
para redução dos efeitos relativos ao padrão de antena, uma vez que tanto as imagens
JERS-1 quanto RADARSAT adquiridas apresentavam-se calibradas (NASDA, 1994) e
(RADARSAT, 1997), respectivamente. Sendo assim, esta etapa visou exclusivamente a
aplicação de filtros redutores de speckle.
Conforme citado anteriormente, o speckle consiste de uma forma multiplicativa de ruído
decorrente da natureza coerente da radiação emitida pelo radar. Este ruído proporciona
uma textura granulosa nas imagens de radar, efeito visual que pode dificultar a extração
de informações úteis.
As técnicas de filtragem para redução do ruído speckle utilizam filtros que variam desde
os mais simples (filtros de média, mediana e variância) até os mais complexos ou
adaptivos (filtros Lee, Frost, Enhanced Frost, Enhanced Lee, Kuan, Fgamma, etc.).
Contudo, os filtros, em geral, atuam no sentido de manter o valor médio do retorno do
radar (backscatter) e de preservar as bordas presentes na imagem e as informações de
textura.
O filtro escolhido para a redução do ruído speckle foi o filtro adaptativo Frost, com
janela de 5x5. Outros filtros foram testados, entretanto, este foi o que apresentou
melhores resultados quanto à redução do speckle e preservação das informações
119
texturais. O critério adotado para a escolha deste filtro foi, exclusivamente, comparativo
e visual entre as diversas imagens SAR filtradas. O software utilizado para a filtragem
das imagens foi o ENVI versão 3.0.
Após esta etapa as imagens foram recortadas, de forma que contivessem a área de
estudo. Este corte também foi efetuado com o intuito de reduzir o tamanho dos arquivos
a serem manipulados.
A segunda etapa dentro do processo de manipulação das Imagens de Radar foi a
Correção Geométrica, que será discutida nos subitens 6.5.4 e 6.5.5.
6.5.3 – Avaliação da Qualidade Geométrica das Imagens de Radar adquiridas
Devido às características do processo de formação das imagens SAR, estas apresentam
distorções tais como, encurtamento e inversão, descritos no capítulo 2. Da mesma
forma, as diferenças de elevação dentro de uma cena imageada também podem
introduzir erros de posição relativa adicionais (RADARSAT, 1995).
Segundo a RADARSAT International, os seus produtos apresentam erros geométricos
relativos menores do que 40 metros, para imagens adquiridas em terrenos planos. Os
produtos Jers-1 não fornecem este tipo de informação.
Assim sendo, com o intuito de avaliar a qualidade geométrica das Imagens Radarsat nos
modos S2 e S3, em ground-range e no formato Path Image, e das Imagens Jers-1 com
nível de processamento 2.1, foram realizadas medidas de distâncias lineares e medidas
angulares, utilizando os pontos de controle adquiridos em campo.
Inicialmente, foram identificadas as coordenadas (coluna,linha) dos pontos possíveis de
ser visualizados em cada imagem. Após a identificação estes pontos foram divididos em
dois subconjuntos: Subconjunto “A”, contendo os pontos que foram utilizados durante a
geocodificação e a orto-retificação das Imagens, e Subconjunto “B” contendo os pontos
utilizados para o cálculo da Exatidão Absoluta e Relativa das Imagens geometricamente
corrigidas. Estes pontos não foram utilizados para a correção geométrica das imagens.
120
Visto que dentro de uma mesma faixa imageada as distorções, anteriormente citadas,
reduzem-se a medida que o ângulo de incidência aumenta, ou seja, da posição mais
próxima ao sensor (near range) para a posição mais afastada (far range), e como os
pontos identificados para cada imagem não foram os mesmos, o critério adotado para a
seleção dos pontos do Subconjunto “B” foi sua distribuição ao longo da direção
transversal da imagem (cross-track direction), gerando um subconjunto de pontos
diferente para cada imagem.
A Tabela 6.1 apresenta o número de pontos identificados em cada imagem, em função
do seu posicionamento.
TABELA 6.1 – NÚMERO DE PONTOS DE CONTROLE POR IMAGEM
IMAGEM
Jers-1 (28/05/1996)
Jers-1 (11/07/1996)
Radarsat (19/08/1996)
Radarsat (04/07/1997)
Radarsat (07/09/1997)
POSIÇÃO
Nº DE PONTOS DO
SUBCONJUNTO “A”
Nº DE PONTOS DO
SUBCONJUNTO “B”
NEAR RANGE
1
0
MIDDLE RANGE
3
2
FAR RANGE
14
3
NEAR RANGE
1
1
MIDDLE RANGE
3
1
FAR RANGE
20
4
NEAR RANGE
4
1
MIDDLE RANGE
24
4
FAR RANGE
5
1
NEAR RANGE
9
3
MIDDLE RANGE
17
2
FAR RANGE
2
0
NEAR RANGE
4
1
MIDDLE RANGE
26
5
FAR RANGE
6
1
Em seguida, foram realizadas comparações entre os valores de distâncias lineares e
ângulos obtidos a partir destas imagens com os valores de distâncias lineares e ângulos
obtidos com os pontos de controle adquiridos em campo. Os resultados destas
comparações serão apresentados no Capítulo 7.
121
6.5.4 – Geocodificação das Imagens de Radar
Durante esta etapa do trabalho, as imagens foram geocodificadas utilizando-se os pontos
de controle, do subconjunto “A”, identificados em cada imagem, e pontos de controle
adquiridos a partir da imagem Landsat-TM de 1998 a qual foi geometricamente
corrigida, a fim de eliminar distorções existentes na mesma, causadas durante seu
processo de formação, pelo sistema sensor e por imprecisão dos dados de
posicionamento e atitude da plataforma (satélite).
Considerando-se que as imagens de radar avaliadas sejam caracterizadas pelas seguintes
distorções: translação, rotação e escala, optou-se pela utilização de um polinômio de 1º
grau, ou transformação afim no plano, durante o processo de geocodificação de todas as
imagens, visto que um polinômio deste grau é suficiente para modelar 06 parâmetros:
(02 translações, 02 rotações e 02 fatores de escala).
A razão para o uso de pontos de controle adquiridos a partir da imagem Landsat-TM, foi
o fato de que os pontos coletados em campo não estavam bem distribuídos por toda a
área de estudo, conforme pode ser observado na Figura 6.4 (os pontos de GPS estão em
azul).
122
Fig. 6.4 – Imagem Landsat-TM com os pontos de GPS coletados em campo. Sistema de
Projeção UTM – Datum SAD-69.
O erro RMS total da imagem Landsat-TM após sua geocodificação ficou em 0,34
pixels, ou seja, para a resolução de 30 metros da imagem TM, este erro corresponde a
10,25 metros de erro de posicionamento absoluto (latitude e longitude), para cada ponto
selecionado nesta imagem.
Visto que a resolução (range x azimute) das imagens Jers-1 é de 18 x 18 metros, e das
imagens Radarsat de 20 x 27 metros e 25 x 27 metros para o modo de imageamento
Standard S2 e S3 respectivamente, um erro de posicionamento de 10,25 metros para os
pontos adquiridos na imagem Landsat foi considerado aceitável.
Uma vez que o espaçamento entre pixels das imagens de radar é de 12,5 metros, as
coordenadas dos pontos selecionados na imagem Landsat foram utilizadas juntamente
123
com as coordenadas dos pontos de GPS durante as fases de geocodificação e ortoretificação das imagens SAR.
A Tabela 6.2 a seguir apresenta o número de pontos selecionados na imagem LandsatTM, que foram utilizados na geocodificação de cada imagem SAR, assim como a
localização relativa destes pontos nestas imagens.
TABELA 6.2 – PONTOS DE CONTROLE ADQUIRIDOS NA IMAGEM
LANDSAT-TM
IMAGEM
Jers-1 (28/05/1996)
Jers-1 (11/07/1996)
Radarsat (19/08/1996)
Radarsat (04/07/1997)
Radarsat (07/09/1997)
POSIÇÃO
Nº DE PONTOS DE CONTROLE
ADQUIRIDOS NA IMAGEM LANDSAT
NEAR RANGE
6
MIDDLE RANGE
6
FAR RANGE
2
NEAR RANGE
2
MIDDLE RANGE
4
FAR RANGE
5
NEAR RANGE
1
MIDDLE RANGE
11
FAR RANGE
5
NEAR RANGE
3
MIDDLE RANGE
6
FAR RANGE
2
NEAR RANGE
2
MIDDLE RANGE
14
FAR RANGE
5
Com a realização da geocodificação das imagens de radar, obteve-se um modelo
matemático que relaciona as coordenadas da imagem (coluna e linha) com coordenadas
geográficas (latitude e longitude) dos pontos de controle, ou seja, o processo de
geocodificação converte as coordenadas da imagem de ( x, y ) para (φ , λ ) , onde as
coordenadas "de referência" são expressas por (φ , λ ) , e as coordenadas da imagem por
( x, y ) . Assim:
ℑ A ( x, y ) = (φ , λ ) ;
(6.1)
124
onde,
ℑ A é o polinômio de mapeamento obtido a partir do subconjunto “A” de pontos de
controle.
6.5.4.1 – Avaliação
da
Qualidade
Geométrica
das
Imagens
de
Radar
Geocodificadas
Para muitas aplicações científicas, tais como mapeamento geológico, pesquisas de
campo, integração de dados de diferentes fontes, dentre outros, a fidelidade geométrica
das imagens utilizadas é muito importante.
Curlander e McDonough (1991) definem a calibração geométrica como o processo de
medição e caracterização das várias fontes de erro em termos dos parâmetros de
precisão da calibração.
Os parâmetros de calibração, que caracterizam a qualidade geométrica de uma imagem,
podem ser divididos em termos de erros absolutos, quando relacionados a algum
sistema de coordenadas, e erros relativos, que descrevem as distorções internas de uma
imagem.
A qualidade geométrica absoluta de uma imagem pode ser descrita por dois parâmetros:
localização e orientação. O erro de localização absoluta corresponde à incerteza na
estimativa do posicionamento de qualquer pixel da imagem com relação a um sistema
de coordenadas (latitude e longitude). O erro de orientação da imagem é a incerteza
angular na estimativa de uma linha da imagem quando comparada a uma linha de
referência, tal como, um eixo do sistema de coordenadas (e.g., o ângulo entre uma linha
da imagem e a linha do equador).
Os parâmetros da qualidade geométrica relativa descrevem a fidelidade geométrica
interna de uma imagem SAR. A qualidade geométrica relativa pode ser caracterizada
por dois parâmetros: escala e rotação.
125
O erro relativo de escala é o erro entre uma distância selecionada na imagem e a
distância geográfica verdadeira ou real. Este erro é normalmente descrito em termos das
dimensões coluna/linha da imagem. O erro relativo de rotação é o erro entre um ângulo
qualquer selecionado na imagem e o ângulo verdadeiro. Por exemplo, duas estradas que
se interceptam a 90º podem ser representadas na imagem com um ângulo de 91º, o que
caracterizaria um erro de rotação relativo de 1º (um grau).
A caracterização da qualidade geométrica da imagem, em termos dos parâmetros acima
listados não é único. Entretanto, esta representação é conveniente para este trabalho,
pois estes parâmetros são passíveis de ser medidos diretamente nas imagens SAR.
Assim sendo, de posse das imagens geocodificadas, foram realizadas comparações entre
os valores de distâncias lineares e ângulos obtidos a partir destas imagens com os
valores de distâncias lineares e ângulos obtidos com os pontos de controle adquiridos
em campo, os quais são considerados como verdadeiros. Este procedimento teve como
propósito avaliar a qualidade geométrica relativa destas imagens, pela análise dos erros
relativos de escala e rotação, conforme descrito acima.
A avaliação da qualidade geométrica absoluta foi realizada visualmente, verificando-se
a coincidência entre as feições lineares (estradas) coletadas com o uso do GPS e estas
mesmas feições nas imagens geocodificadas. Os resultados destes estudos serão
apresentados no Capítulo 7.
6.5.4.2 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar
Geocodificadas
Nesta etapa, os pontos do subconjunto “B” foram utilizados para a avaliação da
exatidão absoluta e relativa das imagens geocodificadas conforme descrito a seguir.
•
Cálculo da Exatidão Absoluta das Imagens Geocodificadas
Este cálculo teve como objetivo a avaliação do erro de localização absoluta, o qual
corresponde, conforme já descrito, a incerteza na estimativa do posicionamento de
126
qualquer pixel da imagem com relação a um sistema de coordenadas (latitude e
longitude).
A avaliação da exatidão absoluta das imagens geocodificadas foi feita pelo cálculo dos
erros quadráticos médios, ou seja:
RMSE =
∑V
2
i
(6.2)
n
onde,
Vi corresponde aos erros para as direções X ou Y, e n ao número de posições utilizados.
Ou seja, se o subconjunto “B” fosse composto por 5 pontos, teríamos 5 erros Vi para
cada eixo. Logo, o n seria, também, igual a 5.
Os erros, ou deltas, para os eixos X e Y foram calculados conforme descrito a seguir:
ℑB ( x, y ) = (φ c , λc ) ;
(6.3)
onde,
ℑ B ( x, y ) é uma função que representa os pontos do subconjunto “B” aplicados ao
polinômio de mapeamento anteriormente calculado, do qual já se conhecem os
parâmetros a0 , a1 , a2 e b0 , b1 , b2 , no caso de uma transformação afim.
Através desta função, os n pontos do subconjunto “B” foram convertidos de
coordenadas da imagem ( x, y ) para coordenadas geográficas calculadas (φ c , λc ) , ou
seja, os n pontos deste subconjunto forneceram n pares (φ c , λc ) . Assim, obtivemos um
novo conjunto de dados chamado de α, composto por:
{(φ1c , λ1c ), (φ 2c , λc2 ),...,(φ nc , λcn )}
(6.4)
127
Como do trabalho de campo tínhamos os n pontos do subconjunto “B”, com suas
coordenadas geográficas verdadeiras (φ , λ ) , tínhamos um outro conjunto de dados que
chamaremos de β, composto por:
{(φ1 , λ1 ), (φ 2 , λ 2 ),..., (φ n , λn )}
(6.5)
Destes dois conjuntos de dados (α e β), foram calculadas as variações para cada ponto
(deltas), para o eixo X (longitude) e para o eixo Y (latitude), ou seja:
{(∆φ1 , ∆λ1 ), (∆φ2 , ∆λ2 ),..., (∆φn , ∆λn )}
(6.6)
Assim, estimamos o erro quadrático médio total nas direções X e Y, através da
aplicação da equação 6.2.
Os seguintes fatores, ou erros, afetam o cálculo da exatidão absoluta das imagens de
radar:
1) A qualidade dos pontos de controle utilizados neste cálculo, que pode ser analisada
pelo erro de exatidão das coordenadas (φ , λ ) destes pontos;
2) A qualidade da geocodificação da imagem, analisada pelos erros residuais da
geocodificação, que afetam a precisão das coordenadas calculadas pela função
ℑB ( x, y ) = (φ c , λc ) ; e
3) O espaçamento entre pixels da imagem, que influencia a exatidão das coordenadas
geográficas calculadas (φ c , λc ) .
A Figura 6.5 tem por finalidade demostrar estes fatores.
128
Coordenada calculada pela função
(afetada pelo erro residual da
geocodificação)
Este erro é função do espaçamento
entre pixels da imagem. Temos
aqui exemplificado o erro máximo
que pode ocorrer, desde que o pixel
seja corretamente identificado.
Coordenada geográfica verdadeira
calculada pelo GPS
-
(afetada pelo erro de exatidão deste
cálculo)
Fig. 6.5 – Fatores que afetam o cálculo da exatidão absoluta das imagens de radar.
•
Cálculo da Exatidão Relativa das Imagens Geocodificadas
Este cálculo teve como objetivo verificar os seguintes erros:
1) erros de escala, através da comparação das distâncias lineares obtidas entre os
pontos de controle do subconjunto “B”, correspondendo à distância geográfica
verdadeira, e as distâncias lineares obtidas com estes pontos, quando
selecionados nas imagens geocodificadas; e
2) erros de rotação, pela comparação entre os ângulos formados pelos pontos do
subconjunto “B” e os ângulos formados por estes mesmos pontos quando
identificados nas imagens geocodificadas.
Como os pontos de controle do subconjunto “B” não foram utilizados durante o
processo de geocodificação das imagens, estes pontos foram utilizados como pontos de
teste, a fim de avaliar a exatidão relativa das imagens geometricamente corrigidas com
os pontos de controle do subconjunto “A”.
O capítulo 7 apresenta os resultados e conclusões relativas às avaliações da Exatidão
Absoluta e Relativa das Imagens SAR que foram geometricamente corrigidas pelo
método da geocodificação.
129
6.5.5 – Orto-retificação das Imagens de Radar
O software utilizado para a orto-retificação das imagens SAR foi o PCI 6.2, mais
especificamente os “módulos”
SRORTHO,
SMODEL,
para o cálculo do modelo matemático e
utilizado para orto-retificar a imagem com o modelo digital de elevação,
conforme apresentado no Capítulo 5.
Para melhorar a precisão do modelo matemático os pontos de controle devem ser
distribuídos ao longo de toda a imagem, incluindo as bordas da imagem, com diferentes
valores de elevação. Assim sendo, os pontos do subconjunto “A” foram
complementados com 05 (cinco) pontos adquiridos a partir da imagem Landsat-TM
1998, para cada imagem SAR avaliada. Os valores de altitude destes pontos foram
adquiridos a partir de carta topográfica da região na escala 1:100.000.
Como o modelo matemático exige o uso de toda a imagem SAR, estas não foram
cortadas a fim de conter a área de estudo. Outra exigência do modelo é de que as
imagens não sofram qualquer tipo de correção radiométrica, como por exemplo
filtragem do ruído speckle. Assim sendo, para a orto-retificação as imagens também não
sofreram qualquer tipo de correção radiométrica prévia.
De posse das imagens SAR completas, dos dados de efemérides do satélite e dos pontos
de controle foi calculado o modelo matemático, o qual forneceu os erros residuais RMS
para cada imagem a ser orto-retificada. A Tabela com os erros residuais em X, Y e erro
total calculado para cada imagem será apresentada no Capítulo 7.
•
Modelo Digital de Elevação
O modelo digital de elevação utilizado foi gerado com o uso do software Spring 3.2 e
constituiu-se das seguintes etapas:
1) Digitalização das curvas de nível e dos pontos cotados das cartas topográficas na
escala 1:100.000. O software utilizado para esta digitalização foi o SGI. Após
digitalizados, estes dados foram importados e mosaicados para um projeto
criado no software Spring 3.2;
130
2) Geração, a partir das amostras, de uma grade triangular, obtida com triangulação
tipo Delaunay e sem linhas de quebra;
3) Geração, a partir da grade triangular, de uma grade retangular com resolução de
12,5 x 12,5 metros, que corresponde ao espaçamento entre pixels8 das imagens
de radar utilizadas. Utilizou-se o interpolador linear para a geração desta grade; e
4) Geração, a partir da grade retangular, de uma imagem em nível de cinza onde o
valor de cada pixel corresponde a um valor de altitude. As altitudes variam de
100 a 376 metros. A área coberta por esta imagem é de 100 Km x 76 Km.
Esta imagem em nível de cinza, com as estradas e os pontos de controle que foram
coletadas com o uso de GPS, é apresentada na Figura 6.7.
A imagem em nível de cinza assim obtida foi exportada no formato “RAW” (formato
requerido pelo software PCI) e utilizada no processo final da correção geométrica das
imagens de radar. Para esta etapa, foram utilizados o modelo do satélite, anteriormente
calculado pelo módulo
SMODEL
do PCI, e o MDE, utilizando-se o “módulo”
do software PCI.
8
Vide definição no Glossário.
131
SRORTHO
Fig. 6.7 – Imagem em Nível de Cinza com as feições lineares e pontos sobrepostos.
Segundo Toutin e Rivard (1997), a precisão das imagens resultantes do processo de
orto-retificação depende da:
•
exatidão do posicionamento dos pontos de controle, utilizados durante o cálculo
do modelo geométrico; e
•
exatidão do modelo digital de elevação, utilizado durante o processo de correção
geométrica da imagem - orto-retificação.
Assim sendo, procurou-se quantificar a precisão do modelo digital de elevação
anteriormente gerado, utilizando-se o gráfico apresentado na Figura 6.8. Neste gráfico
temos as curvas que representam o erro planimétrico das imagens orto-retificadas,
tratado neste trabalho como erro geométrico relativo de escala total, como função do
ângulo de incidência da imagem SAR. Estas curvas foram matematicamente calculadas
132
utilizando-se os parâmetros de distorção de elevação fornecidos pelo modelo de
correção geométrica (Toutin, 1995).
Quando dois destes parâmetros são conhecidos, pode-se deduzir o terceiro parâmetro a
partir desta Figura. Por exemplo, um modelo digital de elevação com erros de elevação
de 10 metros terá este erro propagado durante o processo de correção geométrica, e
produzirá um erro planimétrico de aproximadamente 20 metros na imagem ortoretificada resultante, se a imagem tiver sido adquirida com um ângulo de incidência
central de aproximadamente 27º. Inversamente, se deseja-se obter uma imagem ortoretificada com precisões planimétricas da ordem de 30 metros, com o uso de um modelo
digital de elevação com precisão de 20 metros, a imagem deve ser adquirida com
ângulos de incidência maiores do que 34º, como por exemplo imagens Radarsat nos
modos Fine 1 a Fine 5, Standard S4 a S7 e Wide3.
Fig. 6.8 – Relacionamento entre o ângulo de incidência das imagens de radar (graus), a
precisão do modelo digital de elevação (metros) e o erro planimétrico das
imagens de radar orto-retificadas.
FONTE: adaptada de Toutin e Rivard (1997, p. 65).
133
Após determinar-se a exatidão do modelo digital de elevação, verificou-se a
consistência deste valor conforme explicado a seguir.
Embora a geometria de visada efetiva varie em função das variações de altitude dentro
da área imageada, generalizações podem ser feitas com respeito a faixa de ângulos de
incidência utilizados na obtenção de uma determinada imagem e os níveis de distorção
resultantes. Os valores dos Fatores de Escala Topográfica (TSF), quando multiplicados
pela precisão do modelo digital de elevação fornecem um indicador da exatidão
planimétrica que pode ser obtida para um específico ângulo de incidência (Duncan et
al., 1995).
Como as imagens de radar utilizadas têm ângulos de incidência variando de 24º a 38º,
ou seja, as imagens Jers-1 de 32º a 38º; a Radarsat S2 de 24º a 31º e a Radarsat S3 de
30º a 37º, foram encontrados os valores aproximados dos fatores de escala topográfica
calculando-se a co-tangente de cada um destes ângulos.
Multiplicando-se os valores de TSF assim obtidos pelo valor de precisão do modelo
digital de elevação anteriormente calculado, obteve-se um indicador para o valor da
exatidão planimétrica de cada imagem orto-retificada.
Estes valores foram comparados com os resultados obtidos com a orto-retificação das
imagens de radar, a fim de verificar se o valor calculado para a exatidão do modelo
digital de elevação foi consistente. Os resultados desta análise serão apresentados no
Capítulo 7.
6.5.5.1 - Avaliação da Qualidade Geométrica das Imagens de Radar Ortoretificadas
Assim como foi feito após o processo de geocodificação das imagens SAR, avaliou-se a
fidelidade geométrica interna das imagens orto-retificadas pela análise dos erros
relativos de escala (análise de distâncias lineares) e dos erros relativos de rotação
(análise de ângulos).
134
A avaliação da qualidade geométrica absoluta foi realizada visualmente, verificando-se
a coincidência entre as feições lineares (estradas) coletadas com o uso do GPS e estas
mesmas feições nas imagens orto-retificadas. Os resultados destes estudos serão
apresentados no Capítulo 7.
6.5.5.2 - Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Ortoretificadas
•
Cálculo da Exatidão Absoluta das Imagens Orto-retificadas
O objetivo desta etapa foi avaliar e quantificar o erro de localização absoluta nas
imagens orto-retificadas. Este erro corresponde, conforme descrito anteriormente, à
incerteza na estimativa do posicionamento de qualquer pixel da imagem com relação a
um sistema de coordenadas (latitude e longitude).
O cálculo da exatidão absoluta das imagens orto-retificadas foi realizado com o módulo
SMODEL
do software PCI, o qual forneceu como resultado os erros quadráticos médios,
em X, em Y e o RMS total para cada imagem orto-retificada.
O módulo
SMODEL,
ao calcular os erros residuais, leva em consideração tanto o
posicionamento horizontal dos pontos de controle utilizados como a altitude destes
pontos. Os pontos do subconjunto “B” foram utilizados como pontos de teste para esta
análise.
•
Cálculo da Exatidão Relativa das Imagens Orto-retificadas
Este cálculo teve como objetivo verificar os seguintes erros:
1) erros de escala, através da comparação das distâncias lineares obtidas entre os
pontos de controle do subconjunto “B”, correspondendo à distância geográfica
verdadeira, e as distâncias lineares obtidas com estes pontos, quando suas
coordenadas foram selecionados nas imagens orto-retificadas, e
135
2) erros de rotação, pela comparação entre os ângulos formados pelos pontos do
subconjunto “B” e os ângulos formados por estes mesmos pontos quando
identificados nas imagens orto-retificadas.
Como os pontos de controle do subconjunto “B” não foram utilizados durante o
processo de orto-retificação das imagens, estes pontos foram utilizados como pontos de
teste, a fim de avaliar a exatidão relativa das imagens geometricamente corrigidas com
os pontos de controle do subconjunto “A”, similarmente ao que foi feito durante a etapa
de geocodificação das imagens.
Os resultados e conclusões relativas às avaliações da Exatidão Absoluta e Relativa das
Imagens SAR que foram geometricamente corrigidas pelo método da orto-retificação
serão apresentados no Capítulo 7.
136
CAPÍTULO 7
RESULTADOS E DISCUSSÃO
A seguir é realizada a discussão dos resultados obtidos ao longo do trabalho, de acordo
com a seqüência apresentada no Capítulo 6.
7.1 – Avaliação dos erros relativos aos pontos de controle
A Figura 7.1 apresenta o erro de posicionamento tridimensional, que corresponde a
soma dos erros de latitude, longitude e altitude, para cada ponto de controle adquirido
em campo com o uso do GPS. A linha vermelha indica o valor médio destes erros, que é
igual a 2,19 metros.
ERRO DE POSICIONAMENTO 3D (latitude, longitude e altitude)
9
8
Erros (metros)
7
6
5
4
3
2
1
0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
Pontos de Controle
Fig. 7.1 – Erro de posicionamento 3D dos GCP’s.
A seguir é apresentado o erro de posicionamento horizontal de cada ponto coletado em
campo, o qual não leva em consideração o valor da altitude (Z). A linha azul da Figura
7.2 representa o erro horizontal médio (erros de latitude e longitude) destes pontos, que
é de 1,11 metros.
137
ERRO DE POSICIONAMENTO HORIZONTAL DOS PONTOS DE CONTROLE
5
4,5
4
Erros (metros)
3,5
3
Erro Horizontal
2,5
Erro em latitude
Erro em Longitude
2
1,5
1
0,5
41
39
37
35
33
31
29
27
25
23
21
19
17
15
13
11
9
7
5
3
1
0
Pontos de Controle
Fig. 7.2 – Erro de posicionamento Horizontal dos GCP’s.
Os resultados indicam que o método de processamento diferencial para o cálculo das
coordenadas dos pontos de controle permitiu obter coordenadas com acurácia menor do
que o espaçamento entre pixels das imagens SAR que é de 12,5 metros. A precisão
ficou entre 0,54 e 4,41 metros para o posicionamento planimétrico (latitude e longitude)
e entre 1,31 e 8,13 metros para o posicionamento plani-altimétrico (latitude, longitude e
altitude).
7.2 – Avaliação da Qualidade Geométrica das Imagens de Radar Jers-1 e Radarsat
A fim de efetuar a avaliação da qualidade geométrica relativa das imagens de radar
adquiridas, ou seja, a quantificação de suas distorções internas, realizou-se uma análise
linear, que descreve os erros relativos de escala e uma análise angular, que descreve os
erros relativos de rotação. A seguir são apresentados os resultados obtidos com estas
análises.
7.2.1 – Análise linear das Imagens de Radar Jers-1 e Radarsat
Da comparação entre os valores das distâncias lineares obtidas a partir dos pontos de
controle adquiridos com o GPS, e os valores das distâncias lineares obtidas após a
138
identificação destes pontos nas imagens de radar, obteve-se os valores apresentados na
Tabela 7.1, os quais correspondem ao valor médio das diferenças entre todas as
distâncias analisadas.
TABELA 7.1 – ERRO GEOMÉTRICO RELATIVO DE ESCALA DAS
IMAGENS DE RADAR NÃO CORRIGIDAS GEOMETRICAMENTE
1
IMAGEM
ERRO LINEAR MÉDIO
Jers-1 (28/05/1996)
11,42 metros
Jers-1 (11/07/1996)
15,39 metros
Radarsat S3 (19/08/1996)
12,38 metros
Radarsat S2 (04/07/1997)
14,09 metros
Radarsat S3 (07/09/1997)
13,35 metros
1 - Aqui, o termo Erro Linear significa Erro Geométrico Relativo de Escala.
A seguinte equação foi utilizada para o cálculo da distância linear entre dois pontos (a e
b) nas imagens de radar:
distância linear entre dois pontos na imagem =
(
)
( x a − xb ) 2 + ( y a − y b ) 2 × 12,5
onde o fator multiplicativo 12,5 corresponde ao espaçamento entre pixel das imagens.
A equação utilizada para o cálculo da distância linear entre dois pontos (a e b) quaisquer
obtidos com o GPS é apresentada a seguir:
distância linear entre dois pontos de GPS = ( x a − xb ) 2 + ( y a − yb ) 2
Para o cálculo da distância linear entre dois pontos adquiridos com o uso do GPS foram
utilizadas as coordenadas UTM calculadas para estes pontos pelo GPS e, para o cálculo
da distância linear após a identificação destes pontos nas imagens de radar, foram
utilizadas as coordenadas da imagem (coluna, linha) de cada ponto.
Como os pontos calculados pelo GPS podem localizar-se em qualquer posição dentro de
um determinado pixel da imagem e, visto que a caracterização deste pixel é feita pela
139
identificação de sua posição relativa na imagem, ou seja, sua coordenada (coluna,
linha), que é medida no canto superior esquerdo do pixel, podemos incorrer em um erro
de até 17,68 metros na determinação da posição deste ponto. Este erro corresponde à
diagonal de um pixel de 12,5 x 12,5 metros, conforme demonstrado na Figura 7.3.
Consequentemente, na determinação da distância linear de um ponto a outro da imagem
temos um erro associado correspondente a este valor.
Coordenada do
pixel na imagem
ERRO
Coordenada calculada
pelo GPS
Fig. 7.3 – Erro associado à identificação de um ponto qualquer na imagem de radar.
Caso o pixel que contém a coordenada UTM seja incorretamente identificado, vamos
supor um erro de posicionamento de um pixel em torno do pixel correto, temos que este
erro de posicionamento pode chegar até 35,36 metros.
Assim sendo, a identificação do pixel correto na imagem de radar torna-se uma tarefa de
extrema importância, e ao mesmo tempo bastante difícil, devido às características
inerentes das imagens de radar, como, por exemplo, o ruído speckle, que dificulta
sobremaneira esta identificação.
Supondo que todos os pontos estejam corretamente identificados nas imagens de radar,
calculou-se o Erro Geométrico Relativo de Escala Total, que leva em consideração:
1) o erro linear médio, apresentado na Tabela 7.1;
2) o erro de precisão das coordenadas GPS (1,11 metros); e
3) o erro de identificação do pixel nas imagens de radar (17,68 metros).
140
Este Erro Geométrico Relativo de Escala Total foi obtido calculando-se o erro
quadrático médio para cada imagem de radar utilizada, através da seguinte equação:
RMSE =
∑V
2
(7.1)
i
Onde Vi corresponde aos erros anteriormente descritos. Os valores assim obtidos são
apresentados na Tabela 7.2.
Esta metodologia também foi aplicada durante o cálculo do Erro Geométrico relativo de
Escala Total das Imagens Geocodificadas e Orto-retificadas.
TABELA 7.2 – ERRO GEOMÉTRICO RELATIVO DE ESCALA (TOTAL) DAS
IMAGENS DE RADAR NÃO CORRIGIDAS GEOMETRICAMENTE
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
ERRO GEOMÉTRICO RELATIVO
DE ESCALA (TOTAL)
Jers-1 (28/05/1996)
21,08 metros
Jers-1 (11/07/1996)
23,47 metros
Radarsat S3 (19/08/1996)
21,61 metros
Radarsat S2 (04/07/1997)
22,63 metros
Radarsat S3 (07/09/1997)
22,18 metros
Observa-se na Tabela 7.2 que o erro geométrico relativo das Imagens da Radarsat
manteve-se menor do que 40 metros, conforme declarado pela RADARSAT
International (1997), apesar das mesmas terem sido obtidas em uma região com
variações de altitude de até 276 metros. Nota-se também que as imagens de radar da
JERS-1 também apresentaram erros geométricos relativos menores do que 40 metros.
Segundo Brasil (1986), o padrão de exatidão cartográfica – planimétrico, para cartas da
classe A é de 0,5 mm, na escala da carta. Logo, caso os pontos de controle fossem
obtidos a partir de cartas topográficas, por exemplo na escala 1:100.000, poderíamos
141
esperar um erro de posicionamento de até 50 metros para estes pontos, o que aumentaria
consideravelmente o erro relativo de escala total acima apresentados.
Assim, percebe-se a importância da aquisição de pontos de controle com erros
minimizados, a fim de reduzir o erro geométrico relativo de escala total.
7.2.2 – Análise angular das Imagens de Radar adquiridas
Da comparação entre os valores dos ângulos obtidos com os pontos de controle
adquiridos com o GPS e os valores dos ângulos obtidos após a identificação destes
pontos nas imagens de radar, não corrigidas geometricamente, obteve-se os resultados
apresentados na Tabela 7.3, os quais correspondem ao valor médio das diferenças entre
os ângulos analisados.
TABELA 7.3 – ERRO GEOMÉTRICO RELATIVO DE ROTAÇÃO DAS
IMAGENS DE RADAR NÃO CORRIGIDAS GEOMETRICAMENTE
1
IMAGEM
ERRO ANGULAR MÉDIO
Jers-1 (28/05/1996)
0,05º
Jers-1 (11/07/1996)
0,06º
Radarsat S3 (19/08/1996)
0,06º
Radarsat S2 (04/07/1997)
0,05º
Radarsat S3 (07/09/1997)
0,05º
1 - Aqui, o termo Erro Angular significa Erro Geométrico Relativo de Rotação.
Para o cálculo dos ângulos, formado por cada conjunto de três pontos, utilizaram-se as
coordenadas UTM para os pontos de GPS, e as coordenadas da imagem (coluna, linha)
para os pontos identificados nas imagens.
A fim de verificar se o erro no posicionamento dos pixels nas imagens seria percebido
através desta análise angular, efetuou-se o seguinte estudo:
1) Para cada ângulo, formado por três pontos, variou-se, individualmente, o
posicionamento dos pixels em X e Y, anotando-se quantos pixels seriam
142
necessários deslocar cada ponto, a fim de obtermos uma variação no ângulo
formado por estes pontos, e qual a variação angular obtida.
2) Após realizado este estudo, foi calculada a média de deslocamento dos pixels
para o eixo X e para o eixo Y, e a média de variação ocorrida nos ângulos,
obtendo-se os resultados apresentados na Tabela 7.4.
TABELA 7.4 – ANÁLISE DA VARIAÇÃO ANGULAR EM FUNÇÃO DO
POSICIONAMENTO DOS PIXELS NAS IMAGENS DE RADAR
VARIAÇÃO MÉDIA
VARIAÇÃO
VARIAÇÃO MÉDIA
VARIAÇÃO
DOS PIXELS NO
EIXO X
ANGULAR
MÉDIA
DOS PIXELS NO
EIXO Y
ANGULAR
MÉDIA
Jers-1 (28/05/1996)
1,22
0,02º
1,17
0,03º
Jers-1 (11/07/1996)
1,22
0,02º
1,13
0,03º
Radarsat S3 (19/08/1996)
1,11
0,02º
1,04
0,02º
Radarsat S2 (04/07/1997)
1,21
0,02º
1,03
0,03º
Radarsat S3 (07/09/1997)
1,16
0,02º
1,11
0,02º
IMAGEM
Com este estudo foi possível observar que na maioria dos ângulos analisados, uma
variação de 1 a 2 pixels para os pontos, tanto no eixo X quanto no eixo Y, foi suficiente
para ocasionar uma variação angular média de 0,02º a 0,03º. Assim, conclui-se que a
análise angular também é adequada para o estudo da geometria interna das imagens de
radar.
O resultado obtido com a análise angular, apresentado na Tabela 7.3, é mais difícil de
ser compreendido do que o resultado obtido com a análise linear das mesmas imagens.
Entretanto, comparando-se os resultados adquiridos a partir da análise linear, a qual
indicou um erro menor do que 40 metros para todas as imagens utilizadas
(correspondendo a aproximadamente 2 pixels de erro), com os resultados obtidos a
partir da análise angular, aparentemente, estas análises indicam erros da mesma ordem,
uma vez que variações médias de 1 a 2 pixels para o posicionamento dos pontos que
formam os ângulos ocasionaram variações nestes ângulos.
143
7.3 – Geocodificação das Imagens de Radar
A fim de minimizar as distorções presentes nas Imagens de radar, realizou-se a
geocodificação destas Imagens utilizando-se um polinômio de 1º grau. A Tabela 7.5
apresenta os erros RMS residuais em X, Y e total obtidos com a correção geométrica.
TABELA 7.5 – ERROS QUADRÁTICOS MÉDIOS RESIDUAIS OBTIDOS
APÓS A GEOCODIFICAÇÃO DAS IMAGENS DE RADAR
de GCP’s
utilizados
RMS (X)
(metros)
RMS (Y)
(metros)
RMS (X,Y)
(metros)
Jers-1 (28/05/1996)
32
5,88
7,25
9,33
Jers-1 (11/07/1996)
35
5,13
6,63
8,38
Radarsat S3 (19/08/1996)
50
3,38
5,38
6,35
Radarsat S2 (04/07/1997)
39
5,25
4,75
7,08
Radarsat S3 (07/09/1997)
57
4,13
7,50
8,56
IMAGEM
Nº
Após a geocodificação as imagens geometricamente corrigidas foram avaliadas e sua
qualidade geométrica relativa quantificada. Também foi realizada uma comparação
destas imagens com as imagens originais não corrigidas. Os resultados obtidos são
apresentados a seguir.
7.4 – Avaliação da Qualidade Geométrica das Imagens de Radar Geocodificadas
7.4.1 – Análise Linear das Imagens de Radar Geocodificadas
Ao compararem-se as distâncias lineares entre os pontos de controle, após sua
identificação nas imagens de radar, e as distâncias geográficas verdadeiras entre estes
pontos, calculadas a partir das coordenadas obtidas pelo GPS, obtiveram-se os seguintes
resultados:
144
TABELA 7.6 – ERRO GEOMÉTRICO RELATIVO DE ESCALA DAS
IMAGENS DE RADAR GEOCODIFICADAS
1
IMAGEM
ERRO LINEAR MÉDIO
Jers-1 (28/05/1996)
5,50 metros
Jers-1 (11/07/1996)
8,85 metros
Radarsat S3 (19/08/1996)
4,80 metros
Radarsat S2 (04/07/1997)
5,34 metros
Radarsat S3 (07/09/1997)
4,95 metros
1 - Aqui, o termo Erro Linear significa Erro Geométrico Relativo de Escala.
A partir dos valores apresentados na Tabela 7.6 obteve-se o Erro Geométrico Relativo
de Escala Total para cada imagem geocodificada, calculando-se o erro quadrático
médio, da mesma forma que para as imagens não corrigidas. O resultado obtido é
apresentado na Tabela 7.7.
TABELA 7.7 – ERRO GEOMÉTRICO RELATIVO DE ESCALA (TOTAL) DAS
IMAGENS DE RADAR GEOCODIFICADAS
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
ERRO GEOMÉTRICO RELATIVO
DE ESCALA (TOTAL)
Jers-1 (28/05/1996)
18,55 metros
Jers-1 (11/07/1996)
19,80 metros
Radarsat S3 (19/08/1996)
18,35 metros
Radarsat S2 (04/07/1997)
18,50 metros
Radarsat S3 (07/09/1997)
18,39 metros
Comparando-se o Erro Geométrico Relativo de Escala das imagens geocodificadas com
os valores obtidos a partir da análise das imagens de radar não corrigidas, conclui-se
que houve uma pequena redução destes erros, conforme pode observado na Tabela 7.8 e
na Figura 7.4.
145
TABELA 7.8 – REDUÇÃO DO ERRO GEOMÉTRICO RELATIVO DE
ESCALA (TOTAL) DAS IMAGENS DE RADAR GEOCODIFICADAS EM
RELAÇÃO ÀS IMAGENS NÃO CORRIGIDAS
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
NÃO CORRIGIDAS
GEOCODIFICADAS
redução do
erro em
metros
Redução do
erro em
pixels
Jers-1 (28/05/1996)
21,08 metros
18,55 metros
2,53
0,20
Jers-1 (11/07/1996)
23,47 metros
19,80 metros
3,67
0,29
Radarsat S3 (19/08/1996)
21,61 metros
18,35 metros
3,26
0,26
Radarsat S2 (04/07/1997)
22,63 metros
18,50 metros
4,13
0,33
Radarsat S3 (07/09/1997)
22,18 metros
18,39 metros
3,79
0,30
IMAGEM
ERRO GEOMÉTRICO RELATIVO DE ESCALA (TOTAL)
25
Erros (metros)
20
NÃO CORRIGIDAS
15
GEOCODIFICADAS
10
5
0
Jers (28/05) Jers (11/07) Rsat (19/08) Rsat (04/07) Rsat (07/09)
Imagens de Radar
Fig. 7.4 – Erro geométrico relativo de escala (total) das imagens de radar não corrigidas
e geocodificadas.
146
7.4.1.1 – Avaliação das Imagens de Radar Geocodificadas quanto à escala de
aplicação
Segundo Brasil (1986), as cartas, segundo sua exatidão, são classificadas nas classes A,
B e C, segundo os seguintes critérios:
•
Classe A
1) Padrão de Exatidão Cartográfica – Planimétrico: 0,5 mm, na escala da carta,
2) Padrão de Exatidão Cartográfica – Altimétrico: metade da equidistância
entre as curvas de nível.
•
Classe B
1) Padrão de Exatidão Cartográfica – Planimétrico: 0,8 mm, na escala da carta,
2) Padrão de Exatidão Cartográfica – Altimétrico: três quintos da equidistância
entre as curvas de nível.
•
Classe C
1) Padrão de Exatidão Cartográfica – Planimétrico: 1,0 mm, na escala da carta,
2) Padrão de Exatidão Cartográfica – Altimétrico: três quartos da equidistância
entre as curvas de nível.
Assim sendo, conclui-se que as imagens geocodificadas, apresentaram erros
geométricos (Erro Geométrico Relativo de Escala Total) compatíveis com os erros
geométricos aceitáveis para a confecção de cartas-imagem nas seguintes escalas:
•
Cartas classe A: até a escala máxima de 1:40.000;
•
Cartas classe B: até a escala máxima de 1:25.000; e
•
Cartas classe C: até a escala máxima de 1:20.000.
147
7.4.1.2 – Avaliação da Qualidade Geométrica Absoluta das Imagens de Radar
Geocodificadas
O estudo da Qualidade Geométrica Absoluta das imagens geocodificadas foi realizado
pela sobreposição e análise visual das feições lineares obtidas com o uso do GPS sobre
estas imagens.
Devido a boa precisão das coordenadas dos pontos de controle utilizados para a
geocodificação das Imagens, observa-se pelas Figuras abaixo que a maior parte das
feições lineares nas imagens coincidem com os dados obtidos com o GPS.
Entretanto, partes de algumas feições lineares não se sobrepõe à respectiva feição no
terreno; isto pode ter ocorrido devido ao fato de que o erro inerente à aquisição de dados
com o GPS no modo dinâmico pode chegar a 10 metros ou, como este erro também está
associado a qualidade do sinal recebido pelo receptor, pode-se atingir valores bem
maiores do que os 10 metros acima citados, afetando a precisão do dado coletado.
Os dados coletados com o GPS em modo dinâmico, correspondendo às feições lineares
acima descritas, foram pós-processadas diferencialmente com o software fornecido pelo
fabricante dos receptores Garmim Survey II, a fim de obter-se as melhores precisões
possíveis.
A seguir é apresentada, para cada imagem estudada, a área que contém as feições
lineares (estradas) coletadas em campo com o uso do GPS. Em seguida, é mostrada uma
região de 5x5 Km dentro desta área e um zoom (áreas de 1x1 Km), a fim de obtermos
uma melhor visão do resultado da geocodificação, pela análise visual do
posicionamento das feições lineares.
148
Fig. 7.5 – Parte da Imagem Jers-1 de 28/05 geocodificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69.
Fig. 7.6 – Área de 5x5 Km da Jers-1 de 28/05 geocodificada e com estrada sobreposta.
149
(b)
(a)
Fig. 7.7 – Área de 1x1 Km da Jers-1 de 28/05 sem (a) e com (b) estrada sobreposta.
Fig. 7.8 – Parte da Imagem Jers-1 de 11/07 geocodificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69.
150
Fig. 7.9 – Área de 5x5 Km da Jers-1 de 11/07 geocodificada e com estrada sobreposta.
(a)
(b)
Fig. 7.10 – Área de 1x1 Km da Jers-1 de 11/07 sem (a) e com (b) estrada sobreposta.
151
Fig. 7.11 – Parte da Imagem Radarsat de 19/08 geocodificada e com as estradas
sobrepostas. Projeção UTM – Datum SAD-69. Copyright CSA 1996.
Fig. 7.12 – Área de 5x5 Km da Radarsat de 19/08 geocodificada e com estrada
sobreposta. Copyright CSA 1996.
152
(a)
(b)
Fig. 7.13 – Área de 1x1 Km da Radarsat de 19/08 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1996.
Fig. 7.14 – Parte da Imagem Radarsat de 04/07 geocodificada e com as estradas
sobrepostas. Projeção UTM – Datum SAD-69. Copyright CSA 1997.
153
Fig. 7.15 – Área de 5x5 Km da Radarsat de 04/07 geocodificada e com estrada
sobreposta. Copyright CSA 1997.
(a)
(b)
Fig. 7.16 – Área de 1x1 Km da Radarsat de 04/07 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1997.
154
Fig. 7.17 – Parte da Imagem Radarsat de 07/09 geocodificada e com as estradas
sobrepostas. Projeção UTM – Datum SAD-69. Copyright CSA 1997.
Fig. 7.18 – Área de 5x5 Km da Radarsat de 07/09 geocodificada e com estrada
sobreposta. Copyright CSA 1997.
155
(a)
(b)
Fig. 7.19 – Área de 1x1 Km da Radarsat de 07/09 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1997.
7.4.2 – Análise Angular das Imagens de Radar Geocodificadas
A análise angular das Imagens de Radar geocodificadas teve por finalidade a
quantificação dos erros relativos de rotação destas Imagens. O procedimento utilizado
foi idêntico ao apresentado quando da análise angular das Imagens de Radar não
corrigidas, ou seja, comparou-se o erro entre os ângulos selecionados nas imagens (após
a identificação dos pontos de controle), e os ângulos verdadeiros, obtidos a partir das
coordenadas dos pontos adquiridos com GPS.
A Tabela 7.9 apresenta o Erro Geométrico Relativo de Rotação, para cada imagem
geocodificada, obtido com esta análise. Estes erros correspondem ao valor médio de
todos os ângulos analisados.
TABELA 7.9 – ERRO GEOMÉTRICO RELATIVO DE ROTAÇÃO DAS
IMAGENS DE RADAR GEOCODIFICADAS
1
IMAGEM
ERRO ANGULAR MÉDIO
Jers-1 (28/05/1996)
0,02º
Jers-1 (11/07/1996)
0,04º
Radarsat S3 (19/08/1996)
0,04º
Radarsat S2 (04/07/1997)
0,01º
Radarsat S3 (07/09/1997)
0,03º
1 - Aqui, o termo Erro Angular significa Erro Geométrico Relativo de Rotação.
156
Quando comparados com os erros geométrico relativos de rotação das imagens não
corrigidas, observa-se uma significativa redução dos erros geométricos relativos de
escala, conforme mostrado na Tabela 7.10 e na Figura 7.20.
TABELA 7.10 – PERCENTUAL DE REDUÇÃO DO ERRO GEOMÉTRICO
RELATIVO DE ROTAÇÃO DAS IMAGENS DE RADAR GEOCODIFICADAS
EM RELAÇÃO ÀS IMAGENS NÃO CORRIGIDAS
NÃO CORRIGIDAS
GEOCODIFICADAS
% DE REDUÇÃO
Jers-1 (28/05/1996)
0,05º
0,02º
60,0%
Jers-1 (11/07/1996)
0,06º
0,04º
33,3%
Radarsat S3 (19/08/1996)
0,06º
0,04º
33,3%
Radarsat S2 (04/07/1997)
0,05º
0,01º
80,0%
Radarsat S3 (07/09/1997)
0,05º
0,03º
40,0%
IMAGEM
ERRO GEOMÉTRICO RELATIVO DE ROTAÇÃO
DAS IMAGENS DE RADAR
0,06
Erros (graus)
0,05
NÃO CORRIGIDAS
0,04
GEOCODIFICADAS
0,03
0,02
0,01
0
Jers (28/05) Jers (11/07) Rsat (19/08) Rsat (04/07) Rsat (07/09)
Imagens de Radar
Fig. 7.20 – Erro geométrico relativo de rotação das imagens de radar não corrigidas e
geocodificadas.
157
7.5 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar
Geocodificadas
•
Cálculo da Exatidão Absoluta
A Tabela 7.11 apresenta os erros de localização absoluta, para cada imagem avaliada,
ou seja, a incerteza, em metros, na estimativa do posicionamento absoluto de qualquer
pixel da imagem, em relação a um sistema de coordenadas. Os erros quadráticos médios
são apresentados para o eixo X (longitude), eixo Y (latitude) e total, correspondendo a
ambos os eixos.
TABELA 7.11 – EXATIDÃO ABSOLUTA DAS IMAGENS DE RADAR
GEOCODIFICADAS (ERRO DE LOCALIZAÇÃO ABSOLUTA)
N.º de GCP’s
utilizados
RMS (X)
(metros)
RMS (Y)
(metros)
RMS (X,Y)
(metros)
Jers-1 (28/05/1996)
5
4,56
5,81
7,39
Jers-1 (11/07/1996)
6
8,64
8,67
12,24
Radarsat S3 (19/08/1996)
6
3,58
4,07
5,42
Radarsat S2 (04/07/1997)
5
5,44
3,97
6,73
Radarsat S3 (07/09/1997)
7
6,84
3,90
7,87
IMAGEM
Como podemos observar, a precisão da localização absoluta de um pixel qualquer nas
imagens estudadas, ficou menor do que a célula de resolução destas imagens, ou seja,
menor do que 18 x 18 metros para as Jers-1, 20 x 27 metros para a Radarsat S2 e
25 x 27 metros para as Radarsat S3. Estas resoluções são dadas em range x azimute.
•
Cálculo da Exatidão Relativa
A partir da avaliação da exatidão relativa das imagens geocodificadas, obteve-se o erro
relativo de escala e de rotação que são apresentados na Tabela 7.12.
158
TABELA 7.12 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR
GEOCODIFICADAS (ERRO RELATIVO DE ESCALA E DE ROTAÇÃO)
ERRO RELATIVO DE
ESCALA
ERRO RELATIVO DE
ROTAÇÃO
Jers-1 (28/05/1996)
2,78 metros
0,01º
Jers-1 (11/07/1996)
9,87 metros
0,02º
Radarsat S3 (19/08/1996)
3,29 metros
0,01º
Radarsat S2 (04/07/1997)
5,74 metros
0,02º
Radarsat S3 (07/09/1997)
6,65 metros
0,02º
IMAGEM
Estes resultados representam os valores médios das diferenças entre as distâncias
lineares e ângulos analisados a partir dos pontos de controle do subconjunto “B”.
Para o cálculo da exatidão relativa, mais especificamente dos erros de escala, supôs-se
que todos os pontos foram corretamente identificados nas imagens. Assim sendo, aos
erros apresentados na Tabela 7.12, foram adicionados os seguintes valores: 17,68
metros que, conforme citado anteriormente, corresponde ao erro de identificação do
pixel na imagem; e 1,11 metros, que corresponde ao erro médio da precisão das
coordenadas calculadas para estes pontos pelo GPS. Desta forma, através do cálculo do
erro quadrático médio, foram obtidos os valores apresentados na Tabela 7.13.
TABELA 7.13 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR
GEOCODIFICADAS (ERRO RELATIVO DE ESCALA TOTAL)
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
ERRO GEOMÉTRICO RELATIVO
DE ESCALA (TOTAL)
Jers-1 (28/05/1996)
17,93 metros
Jers-1 (11/07/1996)
20,28 metros
Radarsat S3 (19/08/1996)
18,02 metros
Radarsat S2 (04/07/1997)
18,62 metros
Radarsat S3 (07/09/1997)
18,92 metros
159
Observa-se pelos resultados obtidos que as imagens geocodificadas apresentam
distorções internas bem menores do que as imagens não corrigidas, o que permite que
estas sejam utilizadas para várias aplicações cartográficas.
O resultado da Avaliação da Qualidade Geométrica das imagens geocodificadas (erro
geométrico relativo de escala total, obtido a partir dos pontos do subconjunto “A”), e o
resultado do cálculo da Exatidão Relativa (erro geométrico relativo de escala total,
obtido a partir dos pontos do subconjunto “B”) apresentaram resultados bastante
similares, ratificando este último o resultado obtido a partir da Avaliação da Qualidade
Geométrica das imagens geocodificadas.
Conclui-se então que: utilizando-se pontos de controle com coordenadas bastante
precisas, pode-se, através do processo de geocodificação, atingir precisões planimétricas
que permitem o uso das Imagens Jers-1 e Radarsat, nos modos de imageamento S2 e S3,
para a confecção de cartas-imagem com erros planimétricos compatíveis aos das cartas
topográficas até a escala de 1:40.000, para regiões com relevo pouco movimentado. No
caso deste trabalho, a região de estudo apresenta variações médias de altura de 200
metros).
Os resultados obtidos a partir da avaliação dos erros relativos de rotação, tanto durante a
Avaliação da Qualidade Geométrica quanto durante o Cálculo da Exatidão Relativa, não
permitiram chegar a uma conclusão quanto à precisão das imagens geocodificadas,
devido a dificuldade em analisar-se estes resultados.
160
7.6 – Orto-retificação das Imagens de Radar
A tabela 7.14 apresenta os erros RMS residuais em X, Y e total, obtidos com a ortoretificação das imagens de radar.
TABELA 7.14 – ERROS QUADRÁTICOS MÉDIOS RESIDUAIS OBTIDOS
COM A ORTO-RETIFICAÇÃO DAS IMAGENS DE RADAR
N.º de GCP’s
utilizados
RMS (X)
(metros)
RMS (Y)
(metros)
RMS (X,Y)
(metros)
Jers-1 (28/05/1996)
28
4,39
4,47
6,26
Jers-1 (11/07/1996)
32
3,93
6,27
7,40
Radarsat S3 (19/08/1996)
50
3,08
3,40
4,59
Radarsat S2 (04/07/1997)
38
3,92
3,21
5,07
Radarsat S3 (07/09/1997)
57
3,55
3,22
4,79
IMAGEM
A Tabela 7.15 apresenta o percentual de redução do erro residual total das imagens ortoretificadas, quando comparadas com as imagens geometricamente corrigidas pelo
processo de geocodificação.
TABELA 7.15 – PERCENTUAL DE REDUÇÃO DO ERRO QUADRÁTICO
MÉDIO RESIDUAL TOTAL (X,Y) DAS IMAGENS ORTO-RETIFICADAS EM
RELAÇÃO ÀS IMAGENS GEOCODIFICADAS
GEOCODIFICADAS
ORTO-RETIFICADAS
RMS (X,Y)
RMS (X,Y)
Jers-1 (28/05/1996)
9,33 metros
6,26 metros
32,90 %
Jers-1 (11/07/1996)
8,38 metros
7,40 metros
11,69 %
Radarsat S3 (19/08/1996)
6,35 metros
4,59 metros
27,72 %
Radarsat S2 (04/07/1997)
7,08 metros
5,07 metros
28,39 %
Radarsat S3 (07/09/1997)
8,56 metros
4,79 metros
44,04 %
IMAGEM
% DE REDUÇÃO
Esta redução deve-se ao fato de que durante o processo de orto-retificação o
9
SMODEL
(modelo do satélite) leva em consideração, dentre outros fatores , a altitude de cada
9
Vide Capítulo 5.
161
ponto de controle utilizado, para o cálculo do modelo matemático necessário à ortoretificação das imagens, o que não ocorre durante o processo de geocodificação.
7.7 – Avaliação da Qualidade Geométrica das Imagens de Radar Orto-retificadas
7.7.1 – Análise Linear das Imagens de Radar Orto-retificadas
A Tabela 7.16 apresenta os resultados obtidos ao comparar-se as distâncias lineares
entre os pontos de controle, após sua identificação nas imagens de radar orto-retificadas,
e as distâncias geográficas verdadeiras entre estes pontos, obtidas a partir das
coordenadas calculadas pelo GPS.
TABELA 7.16 – ERRO GEOMÉTRICO RELATIVO DE ESCALA DAS
IMAGENS DE RADAR ORTO-RETIFICADAS
1
IMAGEM
ERRO LINEAR MÉDIO
Jers-1 (28/05/1996)
4,89 metros
Jers-1 (11/07/1996)
4,86 metros
Radarsat S3 (19/08/1996)
4,63 metros
Radarsat S2 (04/07/1997)
4,41 metros
Radarsat S3 (07/09/1997)
4,07 metros
1 - Aqui, o termo Erro Linear significa Erro Geométrico Relativo de Escala.
Juntamente com os valores apresentados na Tabela 7.16 foram levados em consideração
os seguintes erros: o erro de precisão das coordenadas calculadas para cada ponto pelo
GPS, que é de 1,11 metros e o erro de identificação do pixel na imagem, que é igual a
17,68 metros, supondo que os pixels estejam corretamente identificados.
Assim, obteve-se o Erro Geométrico Relativo de Escala Total para cada imagem ortoretificada, aplicando a equação do erro quadrático médio, conforme discutido durante a
análise das imagens não corrigidas e geocodificadas. Os valores assim obtidos são
apresentado na Tabela 7.17.
162
TABELA 7.17 – ERRO GEOMÉTRICO RELATIVO DE ESCALA (TOTAL)
DAS IMAGENS DE RADAR ORTO-RETIFICADAS
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
ERRO GEOMÉTRICO
RELATIVO DE ESCALA TOTAL
Jers-1 (28/05/1996)
18,38 metros
Jers-1 (11/07/1996)
18,37 metros
Radarsat S3 (19/08/1996)
18,31 metros
Radarsat S2 (04/07/1997)
18,26 metros
Radarsat S3 (07/09/1997)
18,18 metros
Comparando-se o Erro Geométrico Relativo de Escala Total das imagens ortoretificadas (Tabela 7.17), com os valores obtidos a partir da análise das imagens de
radar não corrigidas e geocodificadas, conclui-se que:
1) houve uma pequena redução do erro geométrico relativo de escala das imagens
geocodificadas e orto-retificadas, quando comparadas com as imagens não
corrigidas, conforme pode observado nas Tabelas 7.18 e 7.19;
2) não houve melhora significativa quando comparamos as imagens orto-retificadas
com as imagens geocodificadas, devido ao fato de que a área estudada apresenta um
relevo pouco movimentado (variações de 200 metros em média); e
3) conforme citado anteriormente, o erro planimétrico para as cartas topográficas da
classe A é de 0,5 mm; logo, as imagens orto-retificadas, em função do Erro
Geométrico Relativo de Escala Total, são adequadas para a confecção de cartasimagem até a escala máxima de 1:40.000.
163
TABELA 7.18 – REDUÇÃO DO ERRO GEOMÉTRICO RELATIVO DE
ESCALA (TOTAL) DAS IMAGENS DE RADAR ORTO-RETIFICADAS EM
RELAÇÃO ÀS IMAGENS NÃO CORRIGIDAS E GEOCODIFICADAS
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
NÃO CORRIGIDAS
GEOCODIFICADAS
ORTO-RETIFICADAS
Jers-1 (28/05/1996)
21,08 metros
18,55 metros
18,38 metros
Jers-1 (11/07/1996)
23,47 metros
19,80 metros
18,37 metros
Radarsat S3 (19/08/1996)
21,61 metros
18,35 metros
18,31 metros
Radarsat S2 (04/07/1997)
22,63 metros
18,50 metros
18,26 metros
Radarsat S3 (07/09/1997)
22,18 metros
18,39 metros
18,18 metros
IMAGEM
TABELA 7.19 – PERCENTUAL DE REDUÇÃO DO ERRO GEOMÉTRICO
RELATIVO DE ESCALA (TOTAL) ENTRE AS IMAGENS DE RADAR NÃO
CORRIGIDAS, GEOCODIFICADAS E ORTO-RETIFICADAS
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
% DE REDUÇÃO
GEOCODIFICADAS/NÃO
CORRIGIDAS
% DE REDUÇÃO
ORTO-RETIFICADAS/NÃO
CORRIGIDAS
% DE REDUÇÃO
ORTO-RETIFICADAS
/GEOCODIFICADAS
redução
do erro em
metros
% de
redução
do erro
redução
do erro em
metros
% de
redução
do erro
redução
do erro em
metros
% de
redução
do erro
Jers-1 (28/05/1996)
2,53
12,00
2,70
12,82
0,17
0,93
Jers-1 (11/07/1996)
3,67
15,64
5,10
21,73
1,43
7,23
Radarsat S3 (19/08/1996)
3,26
15,09
3,30
15,27
0,04
0,22
Radarsat S2 (04/07/1997)
4,13
18,25
4,37
19,33
0,24
1,32
Radarsat S3 (07/09/1997)
3,79
17,09
4,00
18,05
0,21
1,16
A Figura 7.21 apresenta o Erro Geométrico Relativo de Escala Total das imagens de
radar utilizadas neste estudo.
164
ERRO GEOMÉTRICO RELATIVO DE ESCALA (TOTAL)
DAS IMAGENS DE RADAR AVALIADAS
25
erros (metros)
20
NÃO CORRIGIDAS
15
GEOCODIFICADAS
10
ORTORETIFICADAS
5
0
Jers (28/05) Jers (11/07) Rsat (19/08) Rsat (04/07) Rsat (07/09)
Imagens de Radar
Fig. 7.21 – Erro geométrico relativo de escala total das imagens de radar avaliadas.
7.7.1.1 – Avaliação da Qualidade Geométrica Absoluta das Imagens de Radar
Orto-retificadas
A avaliação da Qualidade Geométrica Absoluta foi realizada pela sobreposição e análise
visual das feições lineares obtidas com o uso do GPS sobre as imagens orto-retificadas.
Observa-se, pelas Figuras abaixo, que não há diferenças perceptíveis no posicionamento
destas feições, nas imagens orto-retificadas, quando comparadas com o posicionamento
das mesmas nas imagens geocodificadas, ratificando que tanto o processo de
geocodificação quanto o de orto-retificação forneceram resultados similares, quando
aplicados a regiões com as características de relevo da área de estudo, e a imagens com
as características das utilizadas para este estudo, tais como ângulo de incidência.
As imagens aqui apresentadas representam apenas uma parte da área orto-retificada. As
imagens orto-retificadas completas, assim como as imagens geocodificadas, os dados
adquiridos com o uso do GPS e a imagem em nível de cinza utilizada para a ortoretificação podem ser acessadas no CD-ROM anexado a este trabalho.
165
Fig. 7.22 – Imagem Jers-1 de 28/05 orto-retificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69.
Fig. 7.23 – Área de 5x5 Km da Jers-1 de 28/05 orto-retificada e com estrada sobreposta.
(b)
(a)
Fig. 7.24 – Área de 1x1 Km da Jers-1 de 28/05 sem (a) e com (b) estrada sobreposta.
166
Fig. 7.25 – Imagem Jers-1 de 11/07 orto-retificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69.
Fig. 7.26 – Área de 5x5 Km da Jers-1 de 11/07 orto-retificada e com estrada sobreposta.
(a)
(b)
Fig. 7.27 – Área de 1x1 Km da Jers-1 de 11/07 sem (a) e com (b) estrada sobreposta.
167
Fig. 7.28 – Imagem Radarsat de 19/08 orto-retificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1996.
Fig. 7.29 – Área de 5x5 Km da Radarsat de 19/08 orto-retificada e com estrada
sobreposta. Copyright CSA 1996.
(a)
(b)
Fig. 7.30 – Área de 1x1 Km da Radarsat de 19/08 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1996.
168
Fig. 7.31 – Imagem Radarsat de 04/07 orto-retificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1997.
Fig. 7.32 – Área de 5x5 Km da Radarsat de 04/07 orto-retificada e com estrada
sobreposta. Copyright CSA 1997.
(a)
(b)
Fig. 7.33 – Área de 1x1 Km da Radarsat de 04/07 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1997.
169
Fig. 7.34 – Imagem Radarsat de 07/09 orto-retificada e com as estradas sobrepostas.
Projeção UTM – Datum SAD-69. Copyright CSA 1997.
Fig. 7.35 – Área de 5x5 Km da Radarsat de 07/09 orto-retificada e com estrada
sobreposta. Copyright CSA 1997.
(a)
(b)
Fig. 7.36 – Área de 1x1 Km da Radarsat de 07/09 sem (a) e com (b) estrada sobreposta.
Copyright CSA 1997.
170
7.7.2 – Análise Angular das Imagens de Radar Orto-retificadas
A análise angular das Imagens de Radar orto-retificadas teve por finalidade a
quantificação dos erros relativos de rotação destas Imagens. O procedimento utilizado
foi idêntico ao apresentado quando da análise angular das Imagens de Radar não
corrigidas e geocodificadas, ou seja, comparou-se o erro entre os ângulos selecionados
nas imagens (após a identificação dos pontos de controle), e os ângulos verdadeiros,
obtidos a partir das coordenadas dos pontos adquiridos com GPS.
A Tabela 7.20 apresenta o Erro Geométrico Relativo de Rotação obtido com esta análise
para cada imagem orto-retificada. Estes erros correspondem ao valor médio de todos os
ângulos analisados.
TABELA 7.20 – ERRO GEOMÉTRICO RELATIVO DE ROTAÇÃO DAS
IMAGENS DE RADAR ORTO-RETIFICADAS
1
IMAGEM
ERRO ANGULAR MÉDIO
Jers-1 (28/05/1996)
0,02º
Jers-1 (11/07/1996)
0,02º
Radarsat S3 (19/08/1996)
0,03º
Radarsat S2 (04/07/1997)
0,01º
Radarsat S3 (07/09/1997)
0,02º
1 - Aqui, o termo Erro Angular significa Erro Geométrico Relativo de Rotação.
Comparando-se o Erro Geométrico Relativo de Rotação das imagens orto-retificadas
aos valores obtidos a partir da análise das imagens de radar não corrigidas e
geocodificadas, conclui-se que:
1) houve uma significativa redução do erro geométrico relativo de rotação das imagens
geocodificadas e orto-retificadas, quando comparadas com as imagens não
corrigidas, conforme pode observado nas Tabelas 7.21 e 7.22;
2) quando comparamos as imagens orto-retificadas com as geocodificadas, notamos
que algumas imagens não apresentaram nenhuma redução no erro de rotação,
171
enquanto que outras apresentaram uma redução significativa (25,0% e 33,3%). Mais
uma vez, a imagem Jers-1 de 11/07/96 foi a que apresentou a maior redução do erro
de rotação - 50%; e
3) os resultados obtidos com a análise angular aparentemente não apresentam uma
relação direta com os resultados da análise linear. Entretanto, indicam que as
imagens geometricamente corrigidas pelo processo de orto-retificação apresentam
melhores resultados (menores erros) do que as imagens corrigidas pelo processo de
geocodificação.
TABELA 7.21 – REDUÇÃO DO ERRO GEOMÉTRICO RELATIVO DE
ROTAÇÃO DAS IMAGENS DE RADAR ORTO-RETIFICADAS EM RELAÇÃO
ÀS IMAGENS NÃO CORRIGIDAS E GEOCODIFICADAS
NÃO CORRIGIDAS
GEOCODIFICADAS
ORTO-RETIFICADAS
Jers-1 (28/05/1996)
0,05º
0,02º
0,02º
Jers-1 (11/07/1996)
0,06º
0,04º
0,02º
Radarsat S3 (19/08/1996)
0,06º
0,04º
0,03º
Radarsat S2 (04/07/1997)
0,05º
0,01º
0,01º
Radarsat S3 (07/09/1997)
0,05º
0,03º
0,02º
IMAGEM
TABELA 7.22 – PERCENTUAL DE REDUÇÃO DO ERRO GEOMÉTRICO
RELATIVO DE ROTAÇÃO ENTRE AS IMAGENS DE RADAR NÃO
CORRIGIDAS, GEOCODIFICADAS E ORTO-RETIFICADAS
% DE REDUÇÃO
% DE REDUÇÃO
% DE REDUÇÃO
GEOCODIFICADAS/NÃO
CORRIGIDAS
ORTO-RETIFICADAS/NÃO
CORRIGIDAS
ORTO-RETIFICADAS
/GEOCODIFICADAS
Jers-1 (28/05/1996)
60,0%
60,0%
0,00%
Jers-1 (11/07/1996)
33,3%
66,6%
50,0%
Radarsat S3 (19/08/1996)
33,3%
50,0%
25,0%
Radarsat S2 (04/07/1997)
80,0%
80,0%
0,00%
Radarsat S3 (07/09/1997)
40,0%
60,0%
33,3%
IMAGEM
A Figura 7.37 apresenta o Erro Geométrico Relativo de Rotação das imagens de radar
utilizadas neste estudo.
172
ERRO GEOMÉTRICO RELATIVO DE ROTAÇÃO
DAS IMAGENS DE RADAR AVALIADAS
0,06
erros (graus)
0,05
NÃO CORRIGIDAS
0,04
GEOCODIFICADAS
0,03
ORTORETIFICADAS
0,02
0,01
0
Jers (28/05) Jers (11/07) Rsat (19/08) Rsat (04/07) Rsat (07/09)
Imagens de Radar
Fig. 7.37 – Erro geométrico relativo de rotação das imagens de radar avaliadas.
7.8 – Cálculo da Exatidão Absoluta e Relativa das Imagens de Radar Ortoretificadas
•
Cálculo da Exatidão Absoluta
A Tabela 7.23 apresenta os erros quadráticos médios obtidos com o módulo SMODEL do
software
PCI.
Estes erros correspondem a incerteza, em metros, na estimativa do
posicionamento absoluto de qualquer pixel da imagem, ou seja, os erros de localização
absoluta.
TABELA 7.23 – EXATIDÃO ABSOLUTA DAS IMAGENS DE RADAR ORTORETIFICADAS (ERRO DE LOCALIZAÇÃO ABSOLUTA)
N.º de GCP’s
utilizados
RMS (X)
(metros)
RMS (Y)
(metros)
RMS (X,Y)
(metros)
Jers-1 (28/05/1996)
5
3,17
4,64
5,62
Jers-1 (11/07/1996)
6
6,96
9,43
11,72
Radarsat S3 (19/08/1996)
6
4,31
4,73
6,39
Radarsat S2 (04/07/1997)
5
6,00
3,64
7,02
Radarsat S3 (07/09/1997)
7
4,68
6,08
7,68
IMAGEM
173
Assim como para as imagens geocodificadas, a precisão da localização absoluta de um
pixel qualquer nas imagens ortoretificadas, é menor do que a célula de resolução destas
imagens, ou seja, menor do que 18 x 18 metros para as Jers-1, 20 x 27 metros para a
Radarsat S2 e 25 x 27 metros para as Radarsat S3.
Comparando-se o erro de localização absoluta das imagens orto-retificadas com o das
imagens geocodificadas nota-se que a redução deste erro nas imagens orto-retificadas
foi mínima e, no caso das imagens Radarsat de 19/08 e de 04/07 este erro foi
aumentado, entretanto, também neste caso a variação foi mínima, conforme pode ser
observado na Tabela 7.24.
TABELA 7.24 – EXATIDÃO ABSOLUTA DAS IMAGENS DE RADAR
GEOCODIFICADAS E ORTO-RETIFICADAS (ERRO DE LOCALIZAÇÃO
ABSOLUTA)
GEOCODIFICADAS
ORTO-RETIFICADAS
RMS (X,Y)
RMS (X,Y)
Jers-1 (28/05/1996)
7,39 metros
5,62 metros
Jers-1 (11/07/1996)
12,24 metros
11,72 metros
Radarsat S3 (19/08/1996)
5,42 metros
6,39 metros
Radarsat S2 (04/07/1997)
6,73 metros
7,02 metros
Radarsat S3 (07/09/1997)
7,87 metros
7,68 metros
IMAGEM
•
Cálculo da Exatidão Relativa
A partir da avaliação da exatidão relativa das imagens orto-retificadas, obteve-se os
erros relativos de escala e de rotação que são apresentados na Tabela 7.25.
174
TABELA 7.25 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR ORTORETIFICADAS (ERRO RELATIVO DE ESCALA E DE ROTAÇÃO)
ERRO RELATIVO DE
ESCALA
ERRO RELATIVO DE
ROTAÇÃO
Jers-1 (28/05/1996)
3,21 metros
0,02º
Jers-1 (11/07/1996)
7,14 metros
0,02º
Radarsat S3 (19/08/1996)
4,48 metros
0,01º
Radarsat S2 (04/07/1997)
4,59 metros
0,02º
Radarsat S3 (07/09/1997)
4,32 metros
0,01º
IMAGEM
Estes resultados representam os valores médios das diferenças entre as distâncias
lineares e ângulos analisados a partir dos pontos de controle do subconjunto “B”.
Para o cálculo da exatidão relativa, mais especificamente dos erros de escala, supôs-se
que todos os pontos foram corretamente identificados nas imagens. Assim sendo, aos
erros apresentados na Tabela 7.25, foram adicionados os seguintes valores: 17,68
metros que corresponde ao erro de identificação do pixel na imagem; e 1,11 metros, que
corresponde ao erro médio da precisão das coordenadas calculadas para estes pontos
pelo GPS. Desta forma, através do cálculo do erro médio quadrático, obteve-se os
valores apresentados na Tabela 7.26.
TABELA 7.26 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR ORTORETIFICADAS (ERRO RELATIVO DE ESCALA TOTAL)
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
IMAGEM
ERRO GEOMÉTRICO
RELATIVO DE ESCALA TOTAL
Jers-1 (28/05/1996)
18,00 metros
Jers-1 (11/07/1996)
19,10 metros
Radarsat S3 (19/08/1996)
18,27 metros
Radarsat S2 (04/07/1997)
18,30 metros
Radarsat S3 (07/09/1997)
18,23 metros
175
Comparando-se o erro geométrico relativo de escala total das imagens geocodificadas
com o das imagens orto-retificadas, observa-se que o resultado obtido com o processo
de orto-retificação não ocasionou variações significativas destes erros, e em alguns
casos o erro obtido com a orto-retificação foi até maior, como pode ser visto na Tabela
7.27.
A razão deste erro maior deve-se ao fato de que o processo de orto-retificação corrige as
distorções da imagem como um todo, diferentemente do processo de geocodificação, o
qual corrige as distorções localmente nos pontos de controle, sendo as demais posições
extrapoladas.
TABELA 7.27 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR
GEOCODIFICADAS E ORTO-RETIFICADAS (ERRO RELATIVO DE
ESCALA TOTAL)
(ERRO QUADRÁTICO MÉDIO - ERRO LINEAR MÉDIO + ERRO DE PRECISÃO DAS
COORDENADAS GPS + ERRO DE IDENTIFICAÇÃO DO PIXEL NA IMAGEM)
GEOCODIFICADAS
ORTO-RETIFICADAS
ERRO RELATIVO DE
ESCALA (TOTAL)
ERRO RELATIVO DE
ESCALA (TOTAL)
Jers-1 (28/05/1996)
17,93 metros
18,00 metros
Jers-1 (11/07/1996)
20,28 metros
19,10 metros
Radarsat S3 (19/08/1996)
18,02 metros
18,27 metros
Radarsat S2 (04/07/1997)
18,62 metros
18,30 metros
Radarsat S3 (07/09/1997)
18,92 metros
18,23 metros
IMAGEM
Comparando-se o erro geométrico relativo de rotação das imagens geocodificadas com
o das imagens orto-retificadas, nota-se que somente as imagens Jers-1 de 28/05 e
Radarsat de 07/09 apresentaram variação do erro de rotação, conforme pode ser
observado na Tabela 7.28.
176
TABELA 7.28 – EXATIDÃO RELATIVA DAS IMAGENS DE RADAR
GEOCODIFICADAS E ORTO-RETIFICADAS (ERRO RELATIVO DE
ROTAÇÃO)
GEOCODIFICADAS
ORTO-RETIFICADAS
ERRO DE ROTAÇÃO
ERRO DE ROTAÇÃO
Jers-1 (28/05/1996)
0,01º
0,02º
Jers-1 (11/07/1996)
0,02º
0,02º
Radarsat S3 (19/08/1996)
0,01º
0,01º
Radarsat S2 (04/07/1997)
0,02º
0,02º
Radarsat S3 (07/09/1997)
0,02º
0,01º
IMAGEM
7.9 – Cálculo da Precisão do Modelo Digital de Elevação
Visto que tem-se os valores correspondentes ao erro planimétrico de cada imagem ortoretificada, apresentado na Tabela 7.17, (erro geométrico relativo de escala total), e o
ângulo de incidência central de cada imagem, obteve-se um valor aproximado para a
precisão do modelo digital de elevação utilizando-se o gráfico apresentado na Figura
7.38.
Fig. 7.38 – Relacionamento entre o ângulo de incidência das imagens de radar (graus), a
precisão do modelo digital de elevação (metros) e o erro planimétrico das
imagens de radar orto-retificadas.
FONTE: adaptada de Toutin e Rivard (1997, p. 65).
177
Os valores assim obtidos são apresentados na tabela 7.29 a seguir.
TABELA 7.29 – PRECISÃO DO MODELO DIGITAL DE ELEVAÇÃO
IMAGEM ORTORETIFICADA
ÂNGULO DE
INCIDÊNCIA CENTRAL
ERRO
PLANIMÉTRICO
PRECISÃO DO
Jers-1 (28/05/1996)
35º
23,68 metros
16,5 metros
Jers-1 (11/07/1996)
35º
23,65 metros
16,5 metros
Radarsat S3 (19/08/1996)
33,5º
23,42 metros
14,5 metros
Radarsat S2 (04/07/1997)
27,5º
23,20 metros
12,0 metros
Radarsat S3 (07/09/1997)
33,5º
22,86 metros
14,5 metros
MODELO
Como os valores de precisão do modelo digital de elevação, variam de 12 a 16,5 metros,
calculou-se um valor médio aproximado de 15 metros para a precisão do modelo.
A fim de verificar a consistência deste resultado, calculou-se o erro planimétrico
inerente de cada imagem de radar, multiplicando-se o valor do Fator de Escala
Topográfica (TSF) de cada ângulo de incidência pelo valor de precisão do modelo
digital de elevação, cujos resultados obtidos são apresentados na Figura 7.39.
TSF ≅ co − tan gente do ângulo de incidência, e
Erro Planimétrico = TSF × precisão do MDE
178
Erro Planimétrico das Imagens Orto-re tificadas
erro planimétrico (metros)
35
30
25
20
15
10
5
0
24 25 26 27 28 29 30 31 32 33 34 35 36 37 38
ângulo de incidência (graus)
Fig. 7.39 – Erro Planimétrico inerente às imagens orto-retificadas, utilizando-se um
modelo digital de elevação com precisão altimétrica de 15 metros.
Estes valores servem apenas de indicadores da precisão planimétrica das imagens ortoretificadas, porém verifica-se que o valor obtido para a precisão altimétrica do modelo
digital de elevação é bastante consistente, conforme explicado a seguir.
Visto que os valores apresentados na Figura 7.39 aproximam-se bastante do resultado
obtido com a orto-retificação das imagens de radar, conforme pode ser observado na
Tabela 7.30, apesar da imagem Radarsat de 04/07 apresentar uma diferença razoável
destes valores, todas as demais apresentam erros da mesma ordem, levando a conclusão
de que o valor de 15 metros obtido para a precisão altimétrica do modelo digital de
elevação é correto.
179
TABELA 7.30 – COMPARAÇÃO DOS VALORES OBTIDOS PARA A
PRECISÃO PLANIMÉTRICA DAS IMAGENS DE RADAR ORTORETIFICADAS, A PARTIR DE UM MODELO DIGITAL DE ELEVAÇÃO COM
PRECISÃO DE 15 METROS, COM O ERRO GEOMÉTRICO RELATIVO DE
ESCALA (TOTAL) DAS IMAGENS ORTO-RETIFICADAS
ÂNGULO DE
INCIDÊNCIA
CENTRAL
ERRO PLANIMÉTRICO EM
FUNÇÃO DO ÂNGULO DE
INCIDÊNCIA CENTRAL
ERRO GEOMÉTRICO RELATIVO
DE ESCALA TOTAL DAS
IMAGENS ORTO-RETIFICADAS
Jers-1 (28/05/1996)
35º
21,45 metros
18,38 metros
Jers-1 (11/07/1996)
35º
21,45 metros
18,37 metros
Radarsat S3 (19/08/1996)
33,5º
22,65 metros
18,31 metros
Radarsat S2 (04/07/1997)
27,5º
28,80 metros
18,26 metros
Radarsat S3 (07/09/1997)
33,5º
22,65 metros
18,18 metros
IMAGEM ORTORETIFICADA
O erro geométrico relativo de escala total das imagens orto-retificadas corresponde ao
erro planimétrico destas imagens, sendo calculado através da equação do erro médio
quadrático anteriormente apresentada, a qual leva em consideração o erro linear médio,
o erro de precisão das coordenadas GPS e o erro de identificação do pixel na imagem.
180
CAPÍTULO 8
CONCLUSÕES E RECOMENDAÇÕES
Apesar da grande quantidade de dados de radar que se tornou disponível nos últimos
anos, são poucos os estudos voltados a uma avaliação criteriosa da qualidade
geométrica destes dados.
Na maioria dos casos, os trabalhos tratam da aplicação de metodologias específicas,
visando uma geocodificação e/ou orto-retificação mais precisa das imagens de radar,
com o objetivo de obter produtos adequados para serem utilizados em escalas maiores,
ou para aplicações em áreas específicas de estudo, como por exemplo, hidrologia
glacial.
A análise dos resultados obtidos permitiu chegar a algumas conclusões quanto à
qualidade geométrica dos produtos Jers-1, com nível de processamento 2.1, e Radarsat,
nos modos de imageamento S2 e S3, em ground-range e no formato path image, e
destes mesmos produtos após corrigidos pelo processo de geocodificação (utilização de
um modelo polinomial de 1º grau), e pelo processo de orto-retificação, com a utilização
do modelo do satélite – SMODEL, o qual calcula o modelo matemático necessário à ortoretificação das imagens de radar.
1) A utilização de pontos de controle adquiridos com uso de um GPS diferencial foi
um fator de fundamental importância para a avaliação da qualidade geométrica das
imagens, visto que permitiu a redução dos erros de posicionamento horizontal
(latitude e longitude) e vertical (altitude) destes pontos, resultando em uma análise
mais precisa das imagens SAR.
2) Para imagens, não corrigidas geometricamente, com as especificações das utilizadas
para este estudo (ângulos de incidência variando de 24º a 37º), adquiridas em
regiões com as características da utilizada para este estudo, ou seja, variações de
altimetria em torno de 200 metros, obtiveram-se erros geométricos relativos de
escala (distorções internas) da ordem de 2 pixels (variações de 21,08 metros a 23,47
metros), em função da imagem avaliada.
181
3) Os erros geométricos relativos de rotação também indicam distorções internas da
ordem de 2 pixels para os produtos avaliados antes de corrigidos geometricamente.
4) Tanto as imagens geometricamente corrigidas pelo processo de geocodificação
quanto as corrigidas pelo processo de orto-retificação, apresentaram uma redução do
erro geométrico relativo de escala da ordem de 1/3 do pixel (4,17 metros).
5) Não houve melhora significativa nos erros relativos de escala das imagens ortoretificadas quando comparadas com as imagens geocodificadas. Houve pouca
melhora nos erros relativos de rotação das imagens orto-retificadas quando
comparadas com as imagens geocodificadas. Assim sendo, para imagens com estas
características, adquiridas em regiões com relevo pouco movimentado, quase plano,
o processo de orto-retificação não traz melhoras significativas à qualidade
geométrica relativa das imagens de radar.
6) Apesar da pouca melhoria da qualidade geométrica interna das imagens ortoretificadas quando comparadas com as imagens geocodificadas, o processo de ortoretificação apresenta aspectos que melhoram as características radiométricas das
imagens, visto que utiliza um filtro redutor de speckle durante este processo.
7) A coincidência da maior parte das feições lineares (estradas) nas imagens corrigidas
com os dados obtidos com o GPS, deve-se ao fato do erro de localização absoluta
para qualquer ponto plotado nestas imagens ser menor do que uma célula de
resolução (18 x 18 metros para as imagens Jers-1, 20 x 27 metros para a Radarsat S2
e 25 x 27 metros para a Radarsat S3).
8) Os resultados obtidos a partir do cálculo da exatidão relativa (erros relativos de
escala e de rotação), das imagens geometricamente corrigidas ratifica os resultados
obtidos durante a avaliação da qualidade geométrica relativa destas imagens, visto
que os resultados são bastante similares.
Apesar de não constituir um objetivo específico deste estudo, os resultados obtidos
permitiram realizar uma avaliação quantitativa do potencial planimétrico das imagens
estudadas.
182
A análise dos resultados mostrou que as imagens Radarsat, no modo Standard S2, e S3
e Jers-1 geometricamente corrigidas, tanto pelo processo de geocodificação quanto pelo
processo de orto-retificação são adequadas para uso nas seguintes escalas:
1) 1:40.000 para a confecção de cartas da classe “A”, as quais permitem erros de
até 0,5 mm na escala da carta;
2) 1:25.000 para a confecção de cartas da classe “B”, as quais permitem erros de
até 0,8 mm na escala da carta;
3) 1:20.000 para a confecção de cartas da classe “C”, as quais permitem erros de
até 1,0 mm na escala da carta;
Apesar do trabalho ter atingido o objetivo proposto, no intuito de tornar o resultado
deste estudo mais abrangente, são apresentadas algumas sugestões para trabalhos
futuros.
1) Visto que as distorções produzidas pelas variações das elevações do terreno, na
direção transversal da imagem (cross-track direction) são função do ângulo de
incidência e da elevação dos alvos, ou seja, para uma mesma área, imagens
adquiridas com ângulos de incidência mais acentuados apresentarão menores
distorções internas (encurtamento e inversão), do que aquelas adquiridas com
ângulos de incidência menores, sugere-se que seja realizado um estudo de avaliação
da qualidade geométrica de imagens de radar, adquiridas em regiões sem relevo;
com relevo médio (similar ao utilizado no presente estudo) e com acentuada
variação do relevo. Porém, utilizando-se imagens com ângulos de incidência bem
variados, como por exemplo imagens da Radarsat no modo Standard S2 (24º a 31º)
e S6 (41º a 46º), e no modo Fine F1 (37º a 40º) e F4 (43º a 46º). Desta forma, será
posível obter um resultado mais abrangente quanto à qualidade destas imagens, as
quais têm sido amplamente utilizadas para fins científicos, e suas possíveis
aplicações cartográficas.
2) Visto que a geração de Modelos Digitais de Elevação a partir de dados obtidos em
cartas topográficas pode ser bastante influenciada pelos erros planimétricos e
altimétricos destas cartas, sugere-se a geração de um Modelo de Elevação a partir do
183
uso de imagens de radar com diferentes ângulos de incidência (pares
estereoscópicos), a fim de obter-se melhores precisões altimétricas para os modelos
e, consequentemente, melhores precisões planimétricas para as imagens ortoretificadas.
3) A identificação dos pontos de controle nas imagens de radar é um dos fatores que
determinará o sucesso e a exatidão da avaliação da qualidade geométrica das
imagens SAR. Assim sendo, a fim de minimizar a incorreta identificação destes
pontos nas imagens devido, principalmente, ao ruído speckle, sugere-se que a
plotagem dos pontos seja realizada a partir de pares estereoscópicos de imagens de
radar.
184
REFERÊNCIAS BIBLIOGRÁFICAS
Adam, S.; Toutin, T.; Pietroniro, A.; Brugman, M. Using ortho-rectified SAR imagery
acquired over rugged terrain for thematic applications in glacier hydrology.
Canadian Journal of Remote Sensing, v.23, n.1, p. 76-80, Mar. 1997.
Bélanger, J.; Cavayas, F.; Gray, J.T. Évaluation de la précision des images Radarsat
orthorectifiées à partir d’éléments de contrôle terrain. [CD-ROM]. In: ADRO Final
Symposium, Montreal, Canadá, Oct. 1998.
Brasil. Decreto lei n. 89.817, de 20 de junho de 1984. Estabelece as instruções
Reguladoras das Normas Técnicas da Cartografia Nacional. In: Brasil. Ministério da
Ciência e Tecnologia. Comissão de Cartografia (COCAR). Cartografia e
aerolevantamento – Legislação. Brasília, 1986. Cap. 2, p. 26-27.
Canadian Space Agency (CSA). RADARSAT Information, Jan. 1996. [on line].
http://radarsat.space.gc.ca/ENG/RADARSAT/introduction.html. Feb. 1998.
Cheng, P.; Toutin, T. High Accuracy Data Fusion of Satellite and and Airphoto Images.
ACSM/ASPRS Annual Convention & Exposition Technical Papers. Charlotte,
North Carolina, Feb 27 - Mar 2, 1995.
Curlander, J.C.; McDonough, R.N. Synthetic aperture radar – systems and signal
processing New York: John Wiley, 1991. 647 p. Cap. 8: Geometric calibration of
SAR data., p. 370-425.
Damião, D.P. Fundamentos de imageamento por radar. Apostila do Ministério da
Aeronáutica. São José dos Campos, maio 1995. 49p.
Duncan, R.G.; Furseth, D.; Nazarenko, D. The potential cartographic accuracy of
RADARSAT data. 1995. Palestra realizada no Workshop de interpretação de
imagens Radarsat, ministrada na Comissão do Sistema de Vigilância na Amazônia
(SIVAM), no Rio de Janeiro, em 07 de Abril de 1998.
Dutra, L.V.; Santos, J.R.; Freitas, C.C.; Novo, E.M.L.; Alves, D.S.; Hernandez Filho,
P.; Rennó, C.D.(AP); Sant'Anna, S.J.S.(AP); Costa, M.P.F.; Ribeiro, M.C.; Soares,
S.M.; Lacruz, M.S.P. The use of JERS-1 data for environment monitoring and
resources assessment in Amazônia. In: JERS-1 Science Program'99 PI Reports:
Global Forest Monitoring and SAR Interferometry. National SpaceDevelopment
Agency of Japan, March 1999, p. 36-44.
Fernandes, D. Simultaneous Generation and Registration of SAR images. [CD-ROM].
In: Jornada Latino-Americana de Sensoriamento Remoto por Radar, 2., Santos,
1998. Anais. São Paulo: Imagem Multimídia, 1998. Palestra Convidada.
Fernandes, D.; Fernandes, M.T.C. Imagens de Radar de Abertura Sintética como
instrumento de auxílio na avaliação do impacto ambiental. [CD-ROM]. In: Simpósio
Brasileiro de Sensoriamento Remoto, 9., Santos, 1998. Anais. São Paulo: Imagem
Multimídia, 1998. Seção de Posters.
185
Gonçalves, A.J.; Dowman, I.J. Precise Geocoding and Orbit Improvement of Radarsat
SAR images. [CD-ROM]. In: ADRO Final Symposium, Montreal, Canadá, Oct. 1998.
Instituto Nacional de Pesquisas Espaciais (INPE). Tutorial do SPRING, DPI. [199-].
[on line]. http://www.dpi.inpe.br/spring/usuario/mnt2.htm. Fev. 1998a.
Instituto Nacional de Pesquisas Espaciais (INPE). Tutorial do SPRING, DPI. [199-].
[on line]. http://www.dpi.inpe.br/spring/usuario/radar. Fev. 1998b.
Jean-Paul, S. Quantitative evaluation of the planimetric potential of RADARSAT
images. [CD-ROM]. In: ADRO Final Symposium, Montreal, Canadá, Oct. 1998.
Kennedy, M. The Global Positioning System and GIS – An Introduction. Chelsea,
Michigan: Ann Arbor Press, 1996. 268 p. Part 1: Basic concepts, p. 6-46.
Kwok, R.; Curlander, J.C.; Pang, S.S. Rectification of terrain induced distortions in
radar imagery. Photogrammetric Engineering & Remote Sensing, v.53, n.5,
p. 507-513, May 1987.
Leberl, F.W. Radargrammetric image processing. Norwood, MA: Artech House,
1990a. 595 p. Cap. 3: Basics of radargrammetry, p. 77-112.
Leberl, F.W. Radargrammetric image processing. Norwood, MA: Artech House,
1990b. 595 p. Cap. 1: Introduction, p. 1-19.
Lillesand, T.M., Kiefer, R.W. Remote sensing and image interpretation. 3.ed. New
York: John Wiley, 1994. 750 p. Cap. 8: Microwave sensing, p. 648-724.
Luscombe, A.P.; Ferguson, I.; Shepherd, N.; Zimcik, D.G., Naraine, P. The radarsat
synthetic aperture radar development. Canadian Journal of Remote Sensing Special issue RADARSAT, v.19, n.4, p. 298-310, Nov.-Dec. 1993.
Maranhão, J.M.A.; Getino, L.C. Corregistro de imagens de radar de abertura
sintética (SAR). São José dos Campos. 47 p. (Trabalho de Graduação) – Instituto
Tecnológico da Aeronáutica,. 1998.
Namikawa, L.M. Um método de ajuste de superfície para grades triangulares
considerando linhas características. São José dos Campos. 118 p. (INPE-6122TDI/583). Dissertação (Mestrado em Computação Aplicada) - Instituto Nacional de
Pesquisas Espaciais, 1995.
Naraghi, M.; Stromberg, W.; Daily, M. Geometric rectification of radar imagery using
digital elevation models. Photogrammetric Engineering & Remote Sensing, v.49,
n.2, p. 195-199, Feb. 1983.
National Space Development Agency of Japan (NASDA). JERS-1 data users
handbook. Japão, 1994.
Paradella, W.R.; Ahern, F.J.; Kux, H.J.H.; Novo, E.M.L.M.; Costa, M.P.F.;
Shimabukuro, Y.E.; Alves, D.S.; Valeriano, D.M. O uso de radar orbital em
aplicações ambientais na Amazônia Brasileira: A avaliação do Radarsat no programa
ADRO. [CDROM]. In: Simpósio Brasileiro de Sensoriamento Remoto, 8., Salvador,
186
1996. Anais. São Paulo: Image Multimídia, 1996. Seção de Comunicações TécnicoCientíficas.
Parashar, S.; Langham, E.; McNally, J.; Ahmed,S. Radarsat mission requirements and
concept. Canadian Journal of Remote Sensing, v.19, n.4, p. 280-288, Nov.-Dez.
1993. Special issue RADARSAT.
PCI. Using PCI Software. Canadá, 1997. Versão 6.2. Volume 2. Canadá, 1997.
Projeto RADAMBRASIL. Folha SC.20-Porto Velho. Geologia, geomorfologia,
pedologia, vegetação e uso potencial da terra. Rio de Janeiro, 1978. v.16, 663p.
RADARSAT International. Radarsat data products specificatios. Canadá,
1997. RSI-GS-026.
RADARSAT International. Guide to products and services. Canadá, 1995.
Richards, J.A. Remote sensing digital image analysis. 2.ed. Springer-Verlag, Berlin,
1993. 281 p. Cap. 2: Error correction and registration of image data, p. 39-74.
Sá, N.C. Elementos de geodésia: apostila da Universidade de São Paulo. São
Paulo. IAG – Departamento de Geodésia, 1990. Cap. 4, p. 53. 117 p.
Schreier, G. SAR geocoding: data and systems. Karlsruhe, Wichmann, 1993. 435 p.
Cap. 4: Geometrical properties of SAR images, p. 103-134.
Simonett, D.S; Ulaby, F.T. Manual of remote sensing. 2.ed. Falls Church:ASP, 1983.
v.1, Glossary, p. 1183-1198.
Skolnik, M.I. Introduction to radar systems. New York, McGraw-Hill, 1962. 648 p.
Cap. 1: The nature of radar, p. 1-19.
Suits, G.H. The nature of eletromagnetic radiation. In: Simonett, D.S. ed. Manual of
remote sensing. 2.ed. Falls Church:ASP, 1983. v.1, Cap. 2, p. 43-44.
Sylvander, S.; Gigord. P.; Durand, P. Evaluation of the geometric potential of
RADARSAT images. [CD-ROM]. In: ADRO Final Symposium, Montreal, Canadá,
Oct. 1998.
The Environment for Visualizing Images (ENVI). ENVI User’s Guide. Versão 3.0.
Colorado, 1997.
Toutin, T. Analyse mathematique des possibilites cartographiques du systeme
SPOT. These (Docteur-Ingenieur en Sciences Geodesiques) - ENSG, Paris, France,
p. 1-163, 1985.
Toutin, T. Multi-source data fusion with an integrated and unified geometric modeling.
EARSEL Journal – advances in remote sensing, v.4, n.2. 12p. 1995.
Toutin, T.; Carbonneau, Y. La Multi-Stereoscopie Pour Les Corrections D'Images
SPOT-HRV. Canadian Journal of Remote Sensing, v.15, n.2, p.110. Sep. 1989.
Toutin, T.; Carbonneau, Y.; St-Laurent, L. An integrated method to rectify airbone
radar imagery using DEM. Photogrammetric Engineering & Remote Sensing,
v.58, n.4, p. 417-422, Abr. 1992.
187
Toutin, T.; Rivard, B. Value added radarsat products for geoscientific applications.
Canadian Journal of Remote Sensing, v.23, n.1, p. 63-70, Mar. 1997.
Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave remote sensing - fundamentals
and radiometry. Norwood, MA: Artech House, 1981a. v.1, 456 p. Cap. 1:
Introduction, p. 1-60.
Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave remote sensing - radar remote
sensing and surface scattering and emission theory. Reading, MA: AddisonWesley, 1982b. v.2, 607 p. Cap. 7: Measurement and Discrimination, p. 457-.560.
Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave remote sensing - radar remote
sensing and surface scattering and emission theory. Reading, MA: AddisonWesley, 1982c. v.2, 607 p. Cap. 8: Real-aperture side-looking airbone radars, p. 562627.
Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave remote sensing - radar remote
sensing and surface scattering and emission theory. Reading, MA: AddisonWesley, 1982d. v.2, 607 p. Cap. 9: Synthetic-aperture side-looking airbone radar
systems, p. 630-744.
Weibel, R.; Heller, M. Digital Terrain model. In: Maguire, D. J.; Goodchild, M. F.;
Rhind, D. W. Geographical information systems. 1.ed. New York, John Wiley,
1991. Cap. 19, p. 269-297.
188
APÊNDICE A
TABELAS DETALHADAS DOS MODOS DE OPERAÇÃO DO RADARSAT
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “Fine”
Especificações dos feixes do satélite
F1
F2
F3
F4
F5
37 - 40
39 - 42
41 - -44
43 - 46
45 - 48
RESOLUÇÃO
(produtos “ground range”)1
(range x azimute) (M)
9,1 x 8,4
8,7 x 8,4
8,4 x 8,4
8,1 x 8,4
7,8 x 8,4
RESOLUÇÃO
(Imagem Complexa 1 look)
(range x azimute) (M)
6,0 x 8,9
6,0 x 8,9
6,0 x 8,9
6,0 x 8,9
6,0 x 8,9
LARGURA NOMINAL DA FAIXA IMAGEADA A
PARTIR DA NADIR ( KM)
250 - 300
295 - 345
340 - 390
385 - 435
420 - 470
POSIÇÕES DOS
DISPONÍVEIS
ÂNGULOS
DE
INCIDÊNCIA
Especificações do processamento da imagem
SINGLE
LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
TAMANHO NOMINAL DA IMAGEM (KM)
50 x 50
50 x 50
50 x 50
50 x 50
50 x 50
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
4,6 x 5,1
6,25 x 6,25
3,125 x 3,125
6,25 x 6,25
6,25 x 6,25
1x1
1x1
1x1
1x1
1x1
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
SINGLE LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
426
128
512
64
64
10.870 x 9.805
8.000 x 8.000
16.000 x 16.000
8.000 x 8.000
8.000 x 8.000
16 - I 16 - Q
16
16
8
8
(pixels x linhas)
BITS / PIXEL
NOTA:
O tamanho da imagem será reduzido se gravado em fita. A largura estimada da imagem é
43 Km.
1) A resolução dos produtos em ground range referem-se às imagens Path Image e Path Image
Plus. O processamento dos produtos Map Image e Precision Map Image podem alterar
ligeiramente a resolução.
189
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “Standard”
Especificações dos feixes do satélite
S1
S2
S3
S4
S5
S6
S7
POSIÇÕES DOS ÂNGULOS DE INCIDÊNCIA
DISPONÍVEIS
20-27
24-31
30-37
34-40
36-42
41-46
45-49
(produtos “ground range”)1
(range x azimute) (M)
26x27
22x27
27,6x27
25,7x27
24,2x27
22,1x27
20,09x27
(Imagem Complexa 1 look)
(range x azimute) (M)
10,5x8,9
10,5x8,9
15,7x8,9
15,7x8,9
15,7x8,9
15,7x8,9
15,7x8,9
0-100
60-160
140-240
210-310
280-380
340-440
400-500
RESOLUÇÃO
RESOLUÇÃO
LARGURA NOMINAL DA FAIXA IMAGEADA A
PARTIR DA NADIR ( KM)
Especificações do processamento da imagem
SINGLE
LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
TAMANHO NOMINAL DA IMAGEM (KM)
100 x 100
100 x 100
100 x 100
100 x 100
100 x 100
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
11,6 x 5,1
12,5 x 12,5
8x8
12,5 x 12,5
12,5 x 12,5
1x1
1x4
1x4
1x4
1x4
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
SINGLE LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
676
128
312,5
64
64
8.620x19.610
8.000 x 8.000
12.500x12.500
8.000 x 8.000
8.000 x 8.000
16 - I 16 - Q
16
16
8
8
(pixels x linhas)
BITS / PIXEL
1) A resolução dos produtos em ground range referem-se às imagens Path Image e Path Image
Plus. O processamento dos produtos Map Image e Precision Map Image podem alterar
ligeiramente a resolução.
190
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “Wide”
Especificações dos feixes do satélite
W1
W2
W3
20 - 31
31 -39
39 -45
RESOLUÇÃO
(produtos “ground range”)1
(range x azimute) (M)
35,5 x 27
26,6 x 27
22,8 x 27
(Imagem Complexa 1 look)
(range x azimute) (M)
15,7 x 8,9
15,7 x 8,9
15,7 x 8,9
0 - 160
145 - 295
290 - 420
POSIÇÕES DOS
DISPONÍVEIS
ÂNGULOS
DE
INCIDÊNCIA
RESOLUÇÃO
LARGURA NOMINAL DA FAIXA IMAGEADA A
PARTIR DA NADIR ( KM)
Especificações do processamento da imagem
SINGLE
LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
TAMANHO NOMINAL DA IMAGEM (KM)
150 x 150
150 x 150
150 x 150
150 x 150
150 x 150
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
11,6 x 5,1
12,5 x 12,5
10 x 10
12,5 x 12,5
12,5 x 12,5
1x1
1x4
1x4
1x4
1x4
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
SINGLE LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION MAP
IMAGE
1.521
288
450
144
144
12.930 x 29.410
12.000 x 12.000
15.000 x 15.000
12.000 x 12.000
12.000x12.000
16 - I 16 - Q
16
16
8
8
(pixels x linhas)
BITS / PIXEL
NOTA:
O tamanho da imagem para W2 será reduzido se gravado em fita. A largura estimada da
imagem será 138 Km.
1) A resolução dos produtos em ground range referem-se às imagens Path Image e Path Image
Plus. O processamento dos produtos Map Image e Precision Map Image podem alterar
ligeiramente a resolução.
191
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “ScanSAR Narrow”
Especificações dos feixes do satélite
POSIÇÕES DOS
DISPONÍVEIS
ÂNGULOS
DE
INCIDÊNCIA
COMBINAÇÕES DOS MODOS DOS FEIXES
RESOLUÇÃO
SNA
SNB
20 -39
31 - 46
W1
W2
W2
S5
S6
73,35 x 47,8
55,1 x 53,8
55,1 x 71,1
50,1 x 71,9
45,7 x 78,8
(range x azimute) (M)
LARGURA NOMINAL DA FAIXA IMAGEADA A
PARTIR DA NADIR ( KM)
0 - 300
145 - 440
Especificações do processamento da imagem
PATH IMAGE
TAMANHO NOMINAL DA IMAGEM (KM)
300 x 300
25 x 25
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
2 x2
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
PATH IMAGE
144
TAMANHO DO ARQUIVO (MB)
12.000 x 12.000
TAMANHO DO ARQUIVO
(pixels x linhas)
8
BITS / PIXEL
NOTA:
Os produtos ScanSAR Narrow são criados utilizando-se um número de feixes nos modos
Wide e Standard. O tamanho da imagem para o modo ScanSAR Narrow será reduzido se
gravado em fita. A largura estimada da imagem será 292 Km.
192
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “ScanSAR Wide”
Especificações dos feixes do satélite
POSIÇÕES DOS ÂNGULOS
INCIDÊNCIA DISPONÍVEIS
DE
COMBINAÇÕES DOS MODOS DOS
FEIXES
RESOLUÇÃO
(range x azimute) (M)
SWA
SWB
20 - 49
20 - 46
W1
W2
W3
SS7
W1
W2
S5
S6
146,8 x
93,1
110,1 x
104,7
94,5 x
117,3
86,5 x
117,5
146,8 x 9
3,1
110,1 x 1
04,7
100,0 x 1
06,0
91,3 x 11
7,6
0 - 500
LARGURA NOMINAL DA FAIXA
IMAGEADA A PARTIR DA NADIR
(KM)
0 - 450
Especificações do processamento da imagem
PATH IMAGE
PATH IMAGE
500 x 500
450 x 450
50 x 50
50 x 50
4 x2
4 x2
TAMANHO NOMINAL DA IMAGEM (KM)
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
PATH IMAGE
PATH IMAGE
100
100
10.000 x 10.000
10.000 x 10.000
8
8
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
(pixels x linhas)
BITS / PIXEL
NOTA:
Os produtos ScanSAR Narrow são criados utilizando-se um número de feixes nos modos
Wide e Standard. Os produtos SWA são estão disponíveis para envio direto a uma
estação de solo; os SWB podem ser armazenados em fita.
193
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “Extended High
Incidence”
Especificações dos feixes do satélite
H1
H2
H3
H4
H5
H6
49 x 52
50 x 53
52 x 55
54 x 57
56 x 58
57 x 59
RESOLUÇÃO
(produtos “ground range”)1
(range x azimute) (M)
19,8 x 27,0
19,4 x 27
19,1 x 27
18,5 x 27
18,2 x 27
18,0 x 27
(Imagem Complexa 1 look)
(range x azimute) (M)
15,7 x 8,9
15,7 x 8,9
15,7 x 8,9
15,7 x 8,9
15,7 x 8,9
15,7 x 8,9
POSIÇÕES DOS ÂNGULOS DE INCIDÊNCIA
DISPONÍVEIS
RESOLUÇÃO
Especificações do processamento da imagem
SINGLE
LOOK
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
75 x 75
75 x 75
75 x 75
75 x 75
75 x 75
11,6 x 5,1
12,5 x 12,5
8x8
12,5 x 12,5
12,5 x 12,5
1x1
1x4
1x4
1x4
1x4
COMPLEX
TAMANHO NOMINAL DA IMAGEM (KM)
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
NÚMERO DE LOOKS
(range x azimute) (M)
Especificações do arquivo digital
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
SINGLE LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
380
72
176
36
36
6.465 x 14.705
6.000 x 6.000
9.375 x 9.375
6.000 x 6.000
6.000 x 6.000
16 - I 16 - Q
16
16
8
8
(pixels x linhas)
BITS / PIXEL
NOTA:
O feixe no modo “Extended High Incidence” opera fora da faixa ótima do ângulo de
varredura da antena SAR. Podem ser esperadas algumas degradações menores da
imagem quando comparadas às imagens produzidas no modo "Standard". Se os dados
forem armazenados em fita, o tamanho esperado da imagem é de 70 Km.
1) A resolução dos produtos em ground range referem-se às imagens Path Image e Path Image
Plus. O processamento dos produtos Map Image e Precision Map Image podem alterar
ligeiramente a resolução.
194
ESPECIFICAÇÕES DO PRODUTO - FEIXE NO MODO “Extended Low
Incidence”
Especificações dos feixes do satélite
L1
10 x 23
POSIÇÕES DOS ÂNGULOS DE INCIDÊNCIA DISPONÍVEIS
(produtos “ground range”)1
(range x azimute) (M)
36,3 x 27,0
(Imagem Complexa 1 look)
(range x azimute) (M)
10,5 x 8,9
RESOLUÇÃO
RESOLUÇÃO
Especificações do processamento da imagem
TAMANHO NOMINAL DA IMAGEM (KM)
ESPAÇAMENTO DO PIXEL (M)
(range x azimute) (M)
NÚMERO DE LOOKS
SINGLE
LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION
MAP IMAGE
170 x 170
170 x 170
170 x 170
170 x 170
170 x 170
8,1 x 5,1
12,5 x 12,5
10 x 10
12,5 x 12,5
12,5 x 12,5
1x1
1x4
1x4
1x4
1x4
(range x azimute) (M)
Especificações do arquivo digital
TAMANHO DO ARQUIVO (MB)
TAMANHO DO ARQUIVO
SINGLE LOOK
COMPLEX
PATH IMAGE
PATH IMAGE
PLUS
MAP IMAGE
PRECISION MAP
IMAGE
2.800
370
578
185
185
20.990 x 33.300
13.600 x 13.600
17.000 x 17.000
13.600 x 13.600
13.600 x 13.600
16 - I 16 - Q
16
16
8
8
(pixels x linhas)
BITS / PIXEL
NOTA:
O feixe no modo “Extended High Incidence” opera fora da faixa ótima do ângulo de
varredura da antena SAR. Podem ser esperadas algumas degradações menores da
imagem quando comparadas às imagens produzidas no modo "Standard".
1) A resolução dos produtos em ground range referem-se às imagens Path Image e Path Image
Plus. O processamento dos produtos Map Image e Precision Map Image podem alterar
ligeiramente a resolução.
195
APÊNDICE B
CARACTERÍSTICAS DAS IMAGENS RADARSAT UTILIZADAS
RSI
CDPF-RSAT
Acquisition Date
Satellite
Orbit Number
Product Id
Product Type
Processing Start Time
Processing End Time
Product Specification:
Product Generation Time
Output Media Type
Tape Id
Tape Capacity
Source Data Quality
Representative lat./long.:
Scene Centre Latitude
Scene Centre Longitude
Data Source Specification:
Sensor Orientation
Sensor Configuration
Beam
Ingest Start Time
Ingest Stop Time
Processing Specification:
Pixel Data Type
Coordinate System
Number of Image Lines
Number of Pixels per Line
Nominal Scene Dimensions:
Range
Azimuth
Nominal Pixel Dimensions:
Range
Azimuth
Orbit Data Source
Image Statistics:
Image Pixels Sampled
% of Zero Pixels
Histrogram Mean
Cumulative Distribution
Number of Azimuth Looks
Number of Range Looks
Product Quality:
Product Quality Index
QC Rating
QC Comment
:
:
:
:
:
:
:
07 September 1997
RSAT-1
9623
M0129189
SGF
1997-250-22:34:57.841
1997-250-22:35:12.834
: 1997-09-23 11:31:09
: EXABYTE
: RE014615
: 2 GB
: 8
:
:
S 09 47 08
W 062 44 29
: NORMAL
: ASCENDING
: S3
: 1997-250-22:34:54.844
: 1997-250-22:35:15.834
: 16 BIT REAL
: GROUND RANGE
: 8041
: 8855
: 110.68750 (km)
: 100.51250 (km)
: 12.500 (m)
: 12.500 (m)
: ORBIT FILE
:
:
:
:
:
:
:
:
2000
0.00
1.95
(90%) 11446.86
(95%) 12949.33
(98%) 14368.01
4
1
: 8
: ACCEPT
: Brazil ccrs_0389
197
RSI
CDPF-RSAT
Acquisition Date
Satellite
Orbit Number
Product Id
Product Type
Processing Start Time
Processing End Time
Product Specification:
Product Generation Time
Output Media Type
Tape Id
Tape Capacity
Source Data Quality
Representative lat./long.:
Scene Centre Latitude
Scene Centre Longitude
Data Source Specification:
Sensor Orientation
Sensor Configuration
Beam
Ingest Start Time
Ingest Stop Time
Processing Specification:
Pixel Data Type
Coordinate System
Number of Image Lines
Number of Pixels per Line
Nominal Scene Dimensions:
Range
Azimuth
Nominal Pixel Dimensions:
Range
Azimuth
Orbit Data Source
Image Statistics:
Image Pixels Sampled
% of Zero Pixels
Histrogram Mean
Cumulative Distribution
Number of Azimuth Looks
Number of Range Looks
Product Quality:
Product Quality Index
QC Rating
QC Comment
:
:
:
:
:
:
:
04 July 1997
RSAT-1
8694
M0119635
SGF
1997-185-22:30:42.773
1997-185-22:30:57.766
: 1997-07-05 03:49:00
: EXABYTE
: RE012673
: 2 GB
: 9
:
:
S 09 51 53
W 062 36 53
: NORMAL
: ASCENDING
: S2
: 1997-185-22:30:39.777
: 1997-185-22:31:00.766
: 16 BIT REAL
: GROUND RANGE
: 8046
: 9020
: 112.75000 (km)
: 100.57500 (km)
: 12.500 (m)
: 12.500 (m)
: ORBIT FILE
:
:
:
:
:
:
:
:
2000
0.00
1.95
(90%) 10517.34
(95%) 12128.01
(98%) 14856.01
4
1
: 9
: ACCEPT
: Brazil ccrs_364807
198
RSI
CDPF-RSAT
Acquisition Date
Satellite
Orbit Number
Product Id
Product Type
Processing Start Time
Processing End Time
Product Specification:
Product Generation Time
Output Media Type
Tape Id
Tape Capacity
Source Data Quality
Representative lat./long.:
Scene Centre Latitude
Scene Centre Longitude
Data Source Specification:
Sensor Orientation
Sensor Configuration
Beam
Ingest Start Time
Ingest Stop Time
Processing Specification:
Pixel Data Type
Coordinate System
Number of Image Lines
Number of Pixels per Line
Nominal Scene Dimensions:
Range
Azimuth
Nominal Pixel Dimensions:
Range
Azimuth
Orbit Data Source
Image Statistics:
Image Pixels Sampled
% of Zero Pixels
Histrogram Mean
Cumulative Distribution
Number of Azimuth Looks
Number of Range Looks
Product Quality:
Product Quality Index
QC Rating
QC Comment
:
:
:
:
:
:
:
19 August 1996
RSAT-1
4478
D0004159
SGF
1996-256-22:34:48.537
1996-256-22:35:03.530
: 1996-12-23 19:40:35
: EXABYTE
: RE008094
: 2 GB
: 9
:
:
S 10 03 48
W 062 41 13
: NORMAL
: ASCENDING
: S3
: 1996-256-22:34:45.541
: 1996-256-22:35:06.530
: 16 BIT REAL
: GROUND RANGE
: 8041
: 8850
: 110.62500 (km)
: 100.51250 (km)
: 12.500 (m)
: 12.500 (m)
: ORBIT FILE
:
:
:
:
:
:
:
:
2000
0.00
1.95
(90%) 10905.59
(95%) 12128.00
(98%) 13535.99
4
1
: 9
: ACCEPT
: 4478/9
199
APÊNDICE C
CARACTERÍSTICAS DAS IMAGENS JERS-1 UTILIZADAS
Observation Date
Satellite
Sensor
Gain Mode
Orbital Direction
Path-Row
Segment Nº
Scene Shift Rate
Cloud Coverage
Ground Station
:
:
:
:
:
:
:
:
:
:
11 July 1996
JERS-1
SAR
A
D
416-317
161304
0
10
FAIS
Processing Level
Map Projection
Resampling Method
Multi Look
Pixel Spacing
:
:
:
:
:
2.1
UTM
NN
3
12,5 m
Center Latitude
Center Longitude
Number of Pixels
Number of Lines
Data Size (MB)
:
:
:
:
:
S 9,876
W 62,437
6000
6400
74,4
Multi Scene Seq. Nº
Multi Scene Total. Nº
Logical Format
Physical Format
Record Format
:
:
:
:
:
1
4
CEOS-BSQ
ISO 9660
ISO 9660
Media
Number of Vol.
W/O Nº
Master Media Nº
Production Date
: CD-ROM
:
:
:
:
1
L9600294-004
D090000137
1997/03/18
201
Observation Date
Satellite
Sensor
Gain Mode
Orbital Direction
Path-Row
Segment Nº
Scene Shift Rate
Cloud Coverage
Ground Station
:
:
:
:
:
:
:
:
:
:
28 May 1996
JERS-1
SAR
A
D
416-317
156907
0
10
FAIS
Processing Level
Map Projection
Resampling Method
Multi Look
Pixel Spacing
:
:
:
:
:
2.1
UTM
NN
3
12,5 m
Center Latitude
Center Longitude
Number of Pixels
Number of Lines
Data Size (MB)
:
:
:
:
:
S 9,876
W 62,498
6000
6400
78,1
Multi Scene Seq. Nº
Multi Scene Total. Nº
Logical Format
Physical Format
Record Format
Media
Number of Vol.
W/O Nº
Master Media Nº
Production Date
:
:
:
:
:
:
:
:
:
:
4
4
CEOS-BSQ
ISO 9660
ISO 9660
CD-ROM
1
L9600294-003
D090000132
1997/03/18
202
APÊNDICE D
DILUIÇÃO DE PRECISÃO DOS DADOS DO GPS
203
204
GLOSSÁRIO
ÂNGULO DE ASPECTO:
"ASPECT ANGLE"
É a orientação geométrica no plano horizontal de um objeto
com relação à iluminação, ou ao feixe de radar transmitido.
ÂNGULO DE INCIDÊNCIA
LOCAL:
"LOCAL INCIDENCE ANGLE"
É o ângulo que leva em consideração o declive do terreno
no qual o alvo está localizado.
ÂNGULO DE INCIDÊNCIA:
"INCIDENCE ANGLE"
É definido como o ângulo entre o feixe de radar (linha de
visada entre o radar e o alvo) e o eixo perpendicular ao
solo, na vertical da trajetória de vôo do satélite. O ângulo
de incidência pode ter uma influência importante no
retroespalhamento do sinal do radar.
ANTENA:
"ANTENNA"
É a parte de um sistema de radar que transmite e recebe
energia eletromagnética.
AZIMUTE:
"AZIMUTH"
É a posição angular de um objeto dentro do campo de
visada de uma antena, no plano que intercepta a linha de
vôo do radar. Este termo é normalmente utilizado para
indicar distância linear ou escala da imagem, na direção
paralela à trajetória de vôo do radar. Em uma imagem,
azimute também é conhecido como a direção ao longo da
faixa imageada.
BANDA C:
É a banda de microondas na qual os comprimentos de onda
estão entre 5,2 cm a 7,0 cm (5,75 GHz a 3,90 GHz).
BANDA L:
É a banda de microondas na qual os comprimentos de onda
estão entre 19 cm e 77 cm (1,55 GHz a 0,39 GHz).
BANDA P:
É a banda de microondas na qual os comprimentos de onda
estão entre 77 cm e 133 cm (0,39 GHz a 0,225 GHz).
BANDA S:
É a banda de microondas na qual os comprimentos de onda
estão entre 7 cm e 19 cm (3,90 GHz e 1,550 GHz).
BANDA X:
É a banda de microondas na qual os comprimentos de onda
estão entre 2,75 cm e 5,20 cm (10,9 GHz e 5,75 GHz).
BANDA:
"BAND"
É um conjunto de comprimentos de onda ou uma faixa de
freqüências de radar.
BRILHO:
"BRIGHTNESS"
É a propriedade de uma imagem de radar na qual a
intensidade da refletividade do radar é expressa como
sendo proporcional a um número digital (imagem digital).
205
DAWN-DUSK:
É um padrão de órbita realizado por um satélite, no qual o
painel solar está quase que continuamente voltado para a
luz solar. O painel solar gera a energia para a emissão do
feixe de energia do radar.
DESLOCAMENTO DO RELEVO:
"ELEVATION DISPLACEMENT"
É a distorção que ocorre em imagens de radar, na direção
transversal, causada por feições do terreno que estão acima
(ou abaixo) da elevação de referência da cena imageada e,
portanto, ficando mais próximas (ou afastadas) do radar do
que sua posição planimétrica. Este efeito pode ser usado
para criar pares estereoscópicos (radar stereo images). Este
efeito pode ser removido de uma imagem mediante o
conhecimento do perfil do terreno.
DETECÇÃO POR RADAR:
"RADAR DETECTION"
É uma medida do menor objeto que pode ser percebido em
uma imagem de radar, como resultado de sua habilidade
em refletir a energia na faixa de microondas.
DETECÇÃO:
"DETECTION"
É o estágio do processamento no qual a intensidade do
sinal é determminada. A detecção extrai a informação de
fase dos dados.
DIREÇÃO DE VISADA:
"LOOK DIRECTION"
É a direção na qual os pulsos de microondas são
transmitidos. A direção de visada é perpendicular à direção
azimutal ou direção de vôo. Também é chamada de direção
transversal.
DISTÂNCIA EM LINHA DE
VISADA:
"SLANT RANGE"
É a distância que conecta o radar a cada elemento
espalhador. Esta distância é medida em tempo a partir do
momento em que o sinal é transmitido até o momento em
que retorna ao sensor.
DISTÂNCIA NO SOLO:
"GROUND RANGE"
É a distância que vai da projeção da trajetória de vôo no
solo (nadir) até um determinado objeto.
É uma distância na direção transversal de uma imagem de
radar quando projetada sobre um plano de referência
horizontal. Para dados de satélites, um modelo geoidal da
Terra é utilizado, ao passo que para dados provenientes de
radares aerotransportados uma aproximação para o plano é
suficiente. A projeção em "ground range" requer uma
transformação geométrica das distâncias em linha de visada
(slant range) para distâncias no solo, ocasionando
deslocamento do relevo, encurtamento e inversão, a menos
que a informação de elevação do terreno seja usada.
206
ELIPSÓIDE:
"ELLIPSOID"
É uma superfície do segundo grau em que todas as seções
normais a um eixo são círculos, e todas as outras são
elipses.
ENCURTAMENTO:
"FORESHORTENING"
É um caso especial de deslocamento do relevo. Este efeito
é mais pronunciado para declives mais íngremes, e para
radares que usam ângulos de incidência pequenos.
É uma distorção especial pela qual declives do terreno que
estão voltados para o feixe de iluminação do radar são
mapeados como tendo uma compressão de escala no
sentido transversal da imagem (em relação à sua aparência
se o terreno fosse plano). O efeito complementar, a
expansão da escala, também no sentido transversal, ocorre
para declives que estão voltados para o lado contrário à
iluminação do radar.
ESPAÇAMENTO ENTRE PIXELS:
"PIXEL SPACING"
É a distância no solo entre o centro de um pixel e o centro
do pixel vizinho, ou seja é a distância entre pixel
adjacentes, e é medida em metros. Este espaçamento pode
ser diferente para as dimensões transversal e azimutal da
imagem.
ESPECULAR:
“SPECULAR”
É a superfície que é lisa para um determinado comprimento
de onda, apresentando as qualidades de um espelho.
FAIXA:
“SWATH”
Largura da cena imageada na direção transversal, ou
seja,perpendicular à trajetória de vôo da plataforma. É
medida em distância no solo (ground range) ou diatância
em linha de visada (slant range).
FEIXE:
"BEAM"
É um pulso de energia focalizado.
FREQÜÊNCIA DOPPLER:
"DOPPLER FREQUENCY"
É o deslocamento em freqüência causado pelo movimento
relativo, ao longo da linha de visada, entre o sensor e a
cena imageada.
GRADE UTM – GRADE
UNIVERSAL TRANSVERSA DE
MERCATOR:
“UTM GRID – UNIVERSAL
TRANSVERSE MERCATOR GRID”
É uma grade baseada na projeção transversa de Mercator,
podendo ser sobreposta a qualquer mapa. A projeção UTM é
caracterizada pela propriedade de conformidade, significando
que a escala e os ângulos são bem preservados, e pela
facilidade com que permite que uma grade retangular seja
sobreposta a ela. É também chamada de projeção GaussKruger. Nesta projeção a Terra é dividida em 60 zonas, cada
uma com 6º de longitude. A zona 1 vai de 180ºW a 174ºW, e a
zona 60 de 174ºE a 180ºE.
207
IMAGEM:
"IMAGE"
É uma representação pictorial adquirida em algum
comprimento de onda do espectro eletromagnético.
INTERVALO DINÂMICO:
"DINAMIC RANGE"
É a relação entre o sinal máximo que pode ser medido e o
sinal mínimo detectável.
INTERVALO:
"RANGE"
É uma medida de dispersão equivalente à diferença entre o
maior e o menor valor em um conjunto de observações.
É a distância em linha de visada entre o radar e cada
elemento espalhador que é iluminado. Em radares de
abertura sintética o termo também é aplicado à dimensão de
uma imagem que se distância transversalmente da trajetória
de vôo do radar.
INVERSÃO:
"LAYOVER"
É um caso extremo de deslocamento do relevo ou de
encurtamento, no qual o topo de um objeto refletor (tal
como uma montanha), está mais próximo do radar (em
linha de visada) do que as partes mais baixas do mesmo. A
imagem de tal objeto apresenta-se inclinada na direção do
radar. Este efeito é mais pronunciado para radares que têm
ângulos de incidência pequenos.
LARGURA DE BANDA:
"BANDWIDTH"
É uma medida da quantidade de freqüências disponíveis no
sinal, ou freqüências passadas pelos estágios de limitação
de banda de um sistema. A largura de banda é um
parâmetro fundamental de qualquer sistema imageador, e
determina a máxima resolução disponível.
LARGURA DO FEIXE:
"BEAMWIDTH"
É uma medida da largura do padrão de irradiação de uma
antena. Para aplicações do SAR, tanto a largura do feixe
vertical (que afeta a extensão da faixa imageada), quanto a
horizontal ou padrão azimutal (que determina,
indiretamente, a resolução azimutal) são conceitos
freqüêntemente utilizados.
MDE (MODELO DIGITAL DE
ELEVAÇÃO)
É um modelo quantitativo de uma característica do terreno
(elevação), em formato digital.
"DEM (DIGITAL ELEVATION
MODEL)"
MODO DO FEIXE:
"BEAM MODE"
É a configuração de operação de um SAR, definida pela
largura da faixa imageada e pela resolução. No caso do
RADARSAT, por exemplo: Fine, Standard, Wide, ScanSar
ou Extended.
208
NADIR:
"NADIR"
São os pontos determinados na superfície terrestre
exatamente abaixo do radar, à medida que este progride ao
longo da linha ou trajetória de vôo.
ÓRBITA HÉLIO-SÍNCRONA:
"SUN-SYNCHRONOUS ORBIT"
É a órbita sincronizada com o Sol, isto é, o ângulo entre o
plano orbital do satélite e a direção do Sol é constante. Para
imagens adquiridas em uma mesma latitude, no mesmo
horário e época do ano, assegura-se condições idênticas de
aquisição dos dados.
ÓRBITA QUASE POLAR:
"NEAR POLAR ORBIT"
É o plano orbital localizado dentro de +10º de um plano
que contém o norte verdadeiro (90º de latitude).
PIXEL:
"PIXEL"
Termo derivado de "picture element" em uma
representação digital para indicar a posição espacial de uma
amostra de uma imagem, a qual consiste de uma matriz de
números digitais.
O pixel é um elemento que contém tanto um aspecto
espacial quanto um aspecto espectral. A variável espacial
define o tamanho aparente e a posição da célula de
resolução, isto é, a área do solo representada por um valor;
e a variável espectral define a intensidade da resposta
espectral para aquela célula em n canais.
POLARIZAÇÃO:
"POLARIZATION"
É a orientação do vetor campo elétrico (E) em uma onda
eletromagnética. Os radares imageadores são capazes de
transmitir e receber com a mesma polarização ou com
polarizações diferentes.
HH - transmissão horizontal / recepção horizontal
VV - transmissão vertical / recepção vertical
HV - transmissão horizontal / recepção vertical
VH - transmissão vertical / recepção horizontal
PONTOS DE CONTROLE NO
TERRENO:
"GCP - GROUND CONTROL
POINTS"
São feições geográficas, de posição conhecida, que são
identificáveis em imagens, e podem ser usadas para
determinar as correções geométricas destas imagens.
POSIÇÃO DO FEIXE:
"BEAM POSITION"
É área dentro da faixa imageada que está sendo de fato
iluminada; para o RADARSAT, em qualquer dos modos de
operação. Por exemplo, existem sete áreas que podem ser
iluminadas quando se utiliza o modo Standard do
RADARSAT, entre os ângulos de incidência de 20º e 49º.
209
RADAR DE ABERTURA
SINTÉTICA:
"SYNTHETIC APERTURE RADAR"
Os sistemas de radar de abertura sintética são aqueles que
usam o movimento da aeronave ou satélite, e a mudança na
freqüência doppler para sintetizar eletronicamente uma
antena longa o suficiente para a aquisição de imagens de
radar de alta resolução.
RADAR IMAGEADOR:
"RADAR, IMAGING"
É um dispositivo de Sensoriamento Remoto ativo que
transmite pulsos de energia na faixa de microondas e
recebe as reflexões deste sinal, após a sua interação com o
alvo. O componente refletido é chamado de eco ou retroespalhamento.
RADAR:
"RADAR"
Termo derivado do termo em inglês "Radar Detection And
Ranging", é basicamente um sistema eletrônico para a
detecção e localização de alvos, pela medição das reflexões
da freqüência de rádio emitida por ele. Este termo também
é aplicado a aparelhos ou sistemas que fazem uso desse
princípio.
RADIÔMETRO:
"RADIOMETER"
É um instrumento utilizado para medir quantitativamente a
intensidade de radiação eletromagnética em uma faixa de
comprimentos de onda, em qualquer parte do espectro
eletromagnético. É normalmente utilizado com um
modificador, como por exemplo um radiômetro
infravermelho ou um radiômetro de microondas.
RESOLUÇÃO DO RADAR:
"RADAR RESOLUTION"
É a mínima separação entre dois alvos, de igual
refletividade no terreno, que permitirá que estes apareçam
individualmente na imagem de radar processada. A
resolução em sistemas de radar difere em duas direções:
direção azimutal ou ao longo da trajetória de vôo e direção
transversal ou perpendicular à trajetória de vôo.
RESOLUÇÃO:
"RESOLUTION"
É a habilidade de um sistema imageador como um todo,
incluindo lentes, antenas, monitores, exposição,
processamento e outros fatores, em gerar uma imagem
nitidamente definida. Pode ser expressa em pares de linhas
por milímetro ou metro, ou de muitos outros modos. Para
sistemas de varredura de linha a resolução pode ser
expressa como campo de visada instantâneo.
É definido também como a menor unidade que pode ser
percebida ou representada. Em imagens de satélite a
resolução refere-se ao menor objeto que pode ser
percebido. Também chamada de resolução espacial.
210
RETROESPALHAMENTO:
"BACKSCATTER"
É o sinal de microondas refletido de volta na direção do
radar, pelos elementos de uma cena iluminada. É assim
chamado para tornar clara a diferença entre a energia
espalhada em direções arbitrárias, e aquela que retorna
diretamente para o radar, podendo, portanto, ser gravada
pelo sensor.
RUGOSIDADE DA SUPERFÍCIE:
“SURFACE ROUGHNESS”
Em geral, uma superfície rugosa é definida como tendo
uma variação de altura de aproximadamente metade do
comprimento de onda do feixe do radar. A rugosidade da
superfície influencia a refletividade da energia de
microondas e, portanto, o brilho das feições na imagem de
radar.
RUGOSIDADE:
"ROUGHNESS"
Variação da altura da superfície dentro de uma célula de
resolução imageada. Uma superfície parece ser rugosa para
a iluminação de microondas quando as variações de altura
tornam-se maiores do que uma fração do comprimento de
onda do feixe de energia emitido pelo radar. A fração é
qualitativa, mas pode ser mostrado que decresce com o
ângulo de incidência.
SENSOR ATIVO:
"ACTIVE SENSOR"
Os sensores ativos, tal como o radar, fornece sua própria
fonte de energia.
SENSOR PASSIVO:
"PASSIVE SENSOR"
Os sensores passivos, tal como os sensores infravermelhos
termais e ópticos, utilizam a radiação eletromagnética
produzida pela superfície ou pelo objeto imageado.
SENSOR:
"SENSOR"
Qualquer aparelho que coleta energia (radiação
eletromagnética) e a apresenta em um formato adequado
para a obtenção de informação sobre o meio-ambiente.
SIG - SISTEMAS DE
INFORMAÇÃO GEOGRÁFICA:
"GIS - GEOGRAPHICAL
INFORMATION SYSTEMS"
É um conjunto organizado de hardware e software
projetado para criar, manipular, analisar e apresentar todos
os tipos de dados geograficamente ou espacialmente
referenciados. Um SIG permite operações espaciais
complexas que seriam muito difíceis de ser realizadas por
outros meios.
SISTEMA ATIVO:
"ACTIVE SYSTEM"
É um sistema de Sensoriamento Remoto que transmite sua
própria energia eletromagnética sobre um objeto, e, então,
grava a energia refletida ou refratada de volta para o sensor.
211
SISTEMA DE POSICIONAMENTO
GLOBAL:
"GPS - GLOBAL POSITIONING
SYSTEM"
É um sistema de navegação ou posicionamento projetado
para utilizar um determinado número de satélites, a fim de
proporcionar a um receptor (usuário), em qualquer lugar na
Terra, com extrema exatidão, medidas de posicionamento
tri-dimensional, velocidade e hora.
SISTEMA DE SENSORIAMENTO
REMOTO ATIVO:
"ACTIVE REMOTE SENSING
SYSTEM"
Sistema que fornece sua própria fonte de energia.
SOMBRA:
"SHADOW"
Ë a área que não foi iluminada pelo feixe do radar e,
portanto, não é visível na imagem de radar resultante. Esta
região é preenchida com "não refletividade", e aparece na
imagem com níveis digitais baixos (escuro).
SPECKLE:
"SPECKLE"
É a flutuação estatística ou incerteza associada ao brilho de
cada pixel de uma imagem. Um sistema SAR de um (01)
look obtém uma estimativa da refletividade de cada célula
de resolução da imagem. O speckle pode ser reduzido, à
custa do decréscimo da resolução, utilizando-se imagens de
vários looks (multilook). O speckle é usualmente
considerado como um ruído multiplicativo.
TEXTURA:
“TEXTURE”
É o padrão espacial da variação e do arranjo das
tonalidades.
TOM:
“TONE”
É cada tonalidade de nível de cinza distinguível em uma
imagem, variando do branco ao preto.
TRAJETÓRIA NO SOLO:
"GROUND TRACK"
É a projeção vertical da trajetória de vôo de umaaeronave
ou satélite sobre a superfície da Terra.
TRANSMISSÃO:
“TRANSMISSION”
É a energia emitida pelo radar, normalmente em uma
seqüência de pulsos, a fim de iluminar uma cena de
interesse.
VERDADE DE CAMPO:
"GROUND TRUTH"
Dados que são adquiridos a partir de verificações em
campo, dados de Sensoriamento Remoto de alta resolução
ou outras fontes de dados conhecidas, para auxiliar na
interpretaçõa de dados adquiridos remotamente. A verdade
de campo é utilizada como a base na tomada de decisões ,
no treinamento de áreas e na avaliaçõa de resultados de
classificações.
VISADAS:
"LOOKS"
São cada uma das sub-imagens usadas para formar a
imagem de saída de um processador SAR.
212
Download