UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ
CAMPUS DE FOZ DO IGUAÇU
PROGRAMA DE PÓS-GRADUAÇÃO EM
ENGENHARIA DE SISTEMAS DINÂMICOS E ENERGÉTICOS
DISSERTAÇÃO DE MESTRADO
CONDIÇÕES DE EXISTÊNCIA DE AUTOEXCITAÇÃO EM
GERADORES DE INDUÇÃO CONFORME SUAS
CONDIÇÕES OPERATIVAS
GIOVANO MAYER
FOZ DO IGUAÇU
2012
Giovano Mayer
Condições de Existência de Autoexcitação em Geradores de
Indução Conforme suas Condições Operativas
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia
de Sistemas Dinâmicos e Energéticos como
parte dos requisitos para obtenção do título de
Mestre em Engenharia de Sistemas Dinâmicos
e Energéticos. Área de concentração: Sistemas
Dinâmicos e Energéticos.
Orientador: Dr. Romeu Reginatto
Foz do Iguaçu
2012
ii
iv
Resumo
A utilização de fontes alternativas de energia requer equipamentos de conversão
eletromecânica que apresentem baixos custos de implantação, operação e manutenção. Desta
forma, pequenos recursos energéticos não ligados ao sistema elétrico de potência (SEP)
podem ser beneficiados pelo emprego do gerador de indução (GI) com rotor em gaiola, que
apresenta tais características. Quando operado de forma isolada, o GI é denominado de SEIG
– Self Excited Induction Generator, e nesta configuração sua autoexcitação é promovida
através do acoplamento de capacitores apropriados aos terminais do estator da máquina. A
existência da autoexcitação no GI depende do valor do capacitor conectado ao estator, da
velocidade mecânica e da carga. Este trabalho tem por objetivo estudar as condições de
existência da autoexcitação em geradores de indução visando sua aplicação em sistemas
isolados de geração. Neste sentido, inicialmente as condições de existência de autoexcitação
são colocadas em termos de parâmetros, unidades e grandezas apropriadas, a fim de explicitar
as relações com as características operativas da máquina. Também é considerado que o
gerador de indução é acoplado a uma carga que contém componentes tanto ativos quanto
reativos parametrizados em termos de potência. Os capacitores de autoexcitação são
representados por sua potência reativa denominada de potência reativa de autoexcitação
(PRAE). São definidas regiões de existência de autoexcitação explicitando condições para a
existência e a manutenção da autoexcitação em torno de regiões operativas (RO) do gerador.
Através da análise da existência da autoexcitação em torno da RO e da representação da
PRAE e da carga em termos de potência, são estabelecidos procedimentos de projeto do
SEIG. Com estes procedimentos, o dimensionamento do SEIG fica em função da carga
máxima a ser acionada, da pior condição de fator de potência da mesma e da velocidade
mínima de autoexcitação do gerador. O processo de autoexcitação do gerador e os
procedimentos de projeto são analisados com o auxílio de simulações dinâmicas do modelo
completo do SEIG, incluindo o modelo não linear da indutância de magnetização
representando a saturação magnética. Uma bancada laboratorial foi desenvolvida para
possibilitar estudos com geração assíncrona, em particular com o SEIG. Os parâmetros do
gerador foram levantados experimentalmente e utilizados em todo o trabalho, inclusive nas
simulações dinâmicas apresentadas. Os resultados foram confrontados também com dados
experimentais de testes de autoexcitação obtidos com a bancada desenvolvida.
Palavras chave: Geradores de Indução Autoexcitados (SEIG), Autoexcitação de Geradores,
Máquina Assíncrona.
v
Abstract
The use of alternative sources of energy requires electromechanical conversion equipments
that exhibit low installation, operating and maintenance costs. In such way, small energy
resources that are not connect to the power system (PS) can be benefited by the use of
squirrel-cage induction generators (IG) which show such characteristics. When operating in
an isolated mode, the IG is called SEIG - Self Excited Induction Generator, and in this
configuration its self excitation is promoted through the connection of appropriate capacitors
to the terminals of the machine stator. The existence of self-excitation in the IG depends on
the value of the capacitor connected to the stator, the mechanical velocity and the load. This
work aims to study the conditions of existence of self-excitation in induction generators
having in mind applications in isolated generators systems. Towards this goal, initially the
conditions for the existence of self-excitation are stated in terms of appropriate parameters,
units and quantities, so as to highlight its relations with the operative characteristics of the
machine. It is considered that the induction generator is connected to a load that contains both
reactive and active components, parameterized in terms of its rated power. The self-excitation
capacitors are represented by its reactive power, called self-excitation reactive power (PRAE).
Self-excitation existence regions are defined which explicitate conditions for the existence
and maintenance of self-excitation over, a region of operating conditions (OR) of the
generator. Through the analysis of the existence of the self-excitation over the OR and the
parameterization of the PRAE and the load in terms or rated power, procedures for SEIG
design are established. With these procedures, the design of the SEIG is defined by the
maximum load power, the worse load power factor condition, and the minimum selfexcitation speed of the generator. The process of self-excitation of the generator and the
design procedures are analyzed with the aid of dynamic simulations of the SEIG complete
model, including the non linear model of the magnetizing inductance representing the
magnetic saturation. A laboratorial bench was developed to allow studies with asynchronous
generation, in particular with the SEIG. The parameters of the generator were identified
experimentally and used all along the work, especially in the dynamic simulations showed.
The results were also compared with experimental data collected from self-excitation tests
performed with the developed laboratory bench.
Keywords: Self Excited Induction Generator (SEIG), Self excitement Generators,
Asynchronous Machine.
vi
vii
Aos meus pais.
À minha querida esposa.
viii
Agradecimentos
Agradeço a Universidade Estadual do Oeste do Paraná – UNIOESTE, pela oportunidade
de realizar este trabalho junto ao Programa de Pós-Graduação em Engenharia de Sistemas
Dinâmicos e Energéticos (PGESDE) e a Universidade Tecnológica Federal do Paraná –
UTFPR – Campus Medianeira, por ceder laboratórios, instalações e equipamentos que
permitiram o desenvolvimento da parte experimental do mesmo.
Durante o curso de mestrado, muitas pessoas colaboraram dando apoio e incentivo ao
desenvolvimento da pesquisa, portanto, agradeço a todos que de forma direta ou indireta
auxiliaram no desenvolvimento deste trabalho, destacando algumas pessoas que foram
fundamentais.
A minha família e especialmente à minha esposa pela força, apoio, dedicação, conforto
e sobretudo compreensão durante todo o curso de mestrado.
Ao meu orientador Romeu Reginatto pelo apoio e experiência transmitida em nossas
conversas que foram fundamentais no desenvolvimento e término do trabalho e que, além
disso, sempre transmitiu segurança e mostrou caminhos quando estes pareciam inexistentes.
Aos professores e colaboradores do PGESDE e aos colegas da UTFPR, Marcos
Fischborn, Yuri Ferruzzi, Estor Gnoatto, Adriano de Andrade Bresolin e Alberto Noboru
Miyadaira pelo apoio e incentivo durante o desenvolvimento deste trabalho.
A todos os colegas de mestrado com quem tive a oportunidade de estudar e trocar
experiências, em especial a Marcos Guilherme Zanchettin pelo apoio e amizade.
ix
x
Sumário
Lista de Figuras
xv
Lista de Tabelas
xxi
Lista de Siglas
xxiii
Lista de Símbolos
1
Introdução
1
1.1
Tipos de Geradores Utilizados em Fontes Alternativas de Energia .......................... 1
1.2
Geradores de Indução Operando de Forma Isolada ................................................. 3
1.3
Autoexcitação em Geradores de Indução ................................................................ 4
1.4
Objetivos do Trabalho ............................................................................................ 8
1.5
2
xxv
1.4.1
Objetivo Geral ............................................................................................ 8
1.4.2
Objetivos Específicos ................................................................................. 9
Estrutura do Trabalho ............................................................................................. 9
Modelo Matemático do SEIG para o Estudo do Processo de Autoexcitação
11
2.1
Esquema de Ligação do SEIG............................................................................... 11
2.2
Modelo Matemático do Gerador de Indução para o Estudo da Autoexcitação ....... 12
2.2.1
Estabilidade do Equilíbrio I = 0 para a Análise do Processo de
Autoexcitação em Geradores de Indução................................................... 15
xi
xii
2.2.2
Análise do Determinante da Matriz Impedância do Gerador de Indução e
Formas de Autoexcitação .......................................................................... 18
2.3 Parametrização da Carga e dos Capacitores de Autoexcitação em Termos de
Potência e Tensão Nominais .................................................................................. 21
3
2.4
Acoplamento da Carga e dos Capacitores de Autoexcitação ao GI ........................ 23
2.5
Condições de Existência de Autoexcitação ........................................................... 25
2.6
Regiões de Existência de Autoexcitação ............................................................... 31
2.7
Conclusões ........................................................................................................... 32
Condições de Existência de Autoexcitação em Torno das Condições Operativas
33
3.1 Definição das Condições de Existência de Autoexcitação em Torno das Regiões
Operativas do SEIG ............................................................................................... 34
3.2
3.1.1
Existência de Autoexcitação em Torno da RO para Cargas Ativas ............ 35
3.1.2
Influência do FP na Existência de Autoexcitação em Torno da RO ........... 38
3.1.3
Análise da Frequência Elétrica da Tensão Gerada em Torno da RO .......... 40
Garantia de Autoexcitação em Torno da RO e Procedimentos de Projeto .............. 44
3.2.1
Procedimentos de Projeto.......................................................................... 46
3.2.2
Efeito da Variação das Resistências de Estator e Rotor nas Superfícies de
Projeto ...................................................................................................... 48
3.2.3
3.3
4
Influência da Variação de
nas Superfícies de Projeto ......................... 49
Conclusões ........................................................................................................... 50
Dinâmica do Processo de Autoexcitação do SEIG
53
4.1
Modelo Matemático do SEIG para Simulações Dinâmicas .................................... 53
4.2
Modelo Matemático do SEIG Considerando a Dinâmica da Indutância de
Magnetização........................................................................................................ 58
4.2.1
Dinâmica da Indutância de Magnetização e Ajuste de Curvas ................... 64
xiii
4.3
Simulação do SEIG .............................................................................................. 68
4.3.1
Disparo da Autoexcitação e Amplitude da Tensão Gerada ........................ 69
4.3.2
Saturação e Autoexcitação sob o Ponto de Vista Dinâmico ....................... 71
4.3.3
Simulação do SEIG para Diferentes Cargas em Torno da RO ................... 75
4.3.4
Condições de Manutenção da Autoexcitação sob o Ponto de Vista Dinâmico
................................................................................................................. 81
4.3.5
4.4
5
Conclusões ........................................................................................................... 85
Bancada para Estudos com Geração Assíncrona e Resultados Experimentais
5.1
5.2
5.3
6
Regime Operativo ..................................................................................... 83
Bancada para Estudos com Geração Assíncrona ................................................... 87
5.1.1
Conjunto Mecânico MP e GI e sua Especificação ..................................... 90
5.1.2
Quadros de Comando e Força ................................................................... 91
5.1.3
Sensores Utilizados para Aquisição de Dados ........................................... 94
5.1.4
Sistema de Aquisição de Dados e Controle de Velocidade da MP ............. 95
Resultados Experimentais ..................................................................................... 97
5.2.1
Resultados Experimentais Sobre a Existência de Autoexcitação ................ 97
5.2.2
Existência e Manutenção da Autoexcitação............................................. 100
5.2.3
Resultados Experimentais das Condições Operativas .............................. 103
Conclusões ......................................................................................................... 104
Conclusões
6.1
87
107
Sugestão de Trabalhos Futuros ........................................................................... 110
Referências Bibliográficas
111
A Ensaios Realizados para a Obtenção dos Parâmetros do Gerador de Indução
115
xiv
B Características Eletromecânicas do GI
135
Lista de Figuras
1.1
Possíveis pontos de operação do SEIG. ................................................................ 5
2.1
Esquema de ligação típica do SEIG. .................................................................... 12
2.2 Circuito que representa o modelo do gerador de indução. (a) Eixo d. (b) Eixo q.
2.3
13
Posição das raízes do polinômio da matriz impedância em função da variação de
e
. .................................................................................................................. 21
2.4
Circuito por fase com os capacitores de autoexcitação e carga RL. ...................... 22
2.5
Conexão da carga e dos capacitores de autoexcitação nos terminais do GI. (a) Eixo
d. (b) Eixo q. ........................................................................................................ 24
2.6
Fluxograma do algoritmo implementado. ............................................................. 27
2.7
Localização das raízes de P(s) em função da variação da PRAE. .......................... 28
2.8
Localização das raízes de P(s) em função da variação da PRAE com baixo valor de
. ..................................................................................................................... 28
2.9
Localização da Raiz 1 em função do aumento da PRAE. ..................................... 29
2.10 Localização da Raiz 1 em função da variação de
. ........................................... 29
2.11 Parâmetros que influenciam na autoexcitação do SEIG. ....................................... 30
2.12 Regiões de existência da autoexcitação para diferentes cargas ativas (FP=1.0).
Linhas tracejadas: Limites de velocidade mínima. Linhas contínuas: Limites de
velocidade máxima. ............................................................................................. 31
3.1
Definição da RO e seu envolvimento por regiões de existência de autoexcitação.
Linhas pontilhadas - RO: Horizontal superior , vertical -
, horizontal inferior -
. Linhas tracejadas - Região de existência de
autoexcitação produzida por uma
. Linhas contínuas - Região de existência
xv
xvi
de autoexcitação produzida por uma
3.2
. .................................................. 35
Regiões de existência de autoexcitação produzidas por uma
tracejadas) e uma
(linhas
(linhas contínuas) que não propiciam a autoexcitação
frente a RO. ........................................................................................................ 36
3.3
Regiões de existência de autoexcitação em torno da RO. Curvas tracejadas . Curvas contínuas -
. ............................................................ 37
= 1.0. ............ 37
3.4
Existência da autoexcitação em torno da RO para cargas com
3.5
Variação da região de existência de autoexcitação frente a cargas indutivas. Linha
3.6
tracejada - Região de existência de autoexcitação para
e
= 1.0. Linhas
contínuas - Região de existência de autoexcitação para
e
= 0.9. .... 38
Valores mínimos de PRAE para diferentes FP e
- Variação da PRAE para diferentes FP e
PRAE para diferentes FP e
3.7
= 0.9
. Linha contínua - Variação da
. ................................................................ 39
= 1.1
= 1.0
. ..................................................................... 41
Variação da frequência elétrica em função da PRAE e da carga com
considerando
3.9
. Linha pontilhada
Variação da frequência elétrica em função da PRAE e da carga com
considerando
3.8
= 1.1
= 1.0
. ..................................................................... 42
Variação da frequência elétrica em função da PRAE para diferentes valores de carga
com
= 0.3 considerando
= 0.9
. .............................................. 42
3.10 Variação da frequência elétrica em função da PRAE para diferentes valores de carga
com
= 0.7 considerando
= 0.9
. .............................................. 43
3.11 Variação da frequência elétrica em função da PRAE para diferentes valores de carga
com
= 0.7 considerando
= 1.05
. ....................................................... 44
3.12 Superfícies de existência de autoexcitação em torno das condições operativas de
carga, FP e velocidade do rotor. .......................................................................... 45
3.13 Superfície superior
3.14 Superfície
de existência de autoexcitação em torno da RO. ............... 45
de projeto da PRAE para carga de 1.1pu. ....................................... 46
3.15 Curvas de nível para dimensionar a
para o SEIG considerado neste
trabalho (carga de 1.1pu). ................................................................................... 47
xvii
3.16 Superfícies de projeto para diferentes valores de temperatura de operação do GI. 49
3.17 Variação da
em função do aumento ou da diminuição de
. ........................ 50
4.1
Autoexcitação do SEIG com
constante. .......................................................... 56
4.2
Comportamento não linear da indutância de magnetização em função da corrente de
magnetização para o gerador em estudo neste trabalho. ........................................ 57
(
). ............................................. 64
4.3
Descontinuidade da derivada da função de
4.4
Aproximação continuamente diferenciável e divergência dos polinômios
4.5
Curvas de
para toda a faixa de
. .......................................................... 67
4.6
Simulação do SEIG sem a dinâmica de
. ......................................................... 68
4.7
Simulação do SEIG considerando a dinâmica de
4.8
Disparo da Autoexcitação. (a) Com magnetismo residual no rotor. (b) Com tensão
e
inicial em
4.9
. ........................................... 69
. ................................................................................................... 70
Tensão gerada em função do aumento da velocidade mecânica: (a)
= 1.0
e ̇ . ... 66
= 1.1
. (c)
= 0.9
. (b)
. ............................................................................ 70
4.10 Curva de magnetização e trechos de operação. ..................................................... 71
4.11 Autoexcitação do GI sem carga com
nula. (a) Tensão
= 0.374
dimensionda para carga
. (b) Indutância de magnetização. (c) Corrente de Magnetização.
............................................................................................................................. 72
= 0.614
4.12 Autoexcitação do GI sem carga com
= 1.1
(
= 1.0) e
= 0.9
dimensionada para
. (a) Tensão
. (b) Indutância
de magnetização. (c) Corrente de Magnetização. .................................................. 72
4.13 Autoexcitação e sua perda por aplicação de sobrecarga. (a) Corrente de
magnetização. (b) Fluxo magnético. ..................................................................... 73
4.14 Dinâmica de
na autoexcitação e na perda da mesma devido a aplicação de
sobrecarga no GI. A autoexcitação é perdida em = 7 . .................................... 74
4.15 Autoexcitação e sua perda por aplicação de sobrecarga. (a) Tensão
. (b) Corrente
da carga eixo direto. ............................................................................................. 75
4.16 Autoexcitação do gerador de indução para
= 0.9
e
= 0.0
(
= 1.0).
xviii
= 0.374
. (b)
= 0.370
4.17 Localização da raiz 1 para
= 0.370
(a)
. .................................................... 76
= 0.374
e
. .................... 77
4.18 Tensões e correntes para o caso 1(b). (a) Tensão fase “a”. (b) Corrente fase “a”.
78
4.19 Correntes na fase “a” dos capacitores e da carga para o caso 1(b). ...................... 78
4.20 Velocidade mecânica (a) e indutância de magnetização (b). ................................ 79
4.21 Aplicação de carga e variação de velocidade mecânica. (a) Tensão da fase "a". (b)
Corrente de estator da fase "a". .......................................................................... 80
4.22 (a) Variação de
de
. (b) Comportamento de
com a aplicação de carga e variação
. ................................................................................................................. 80
4.23 Aplicação de 0.2pu de carga e variação de velocidade no trecho BC da curva de
Magnetização. . (a) Velocidade mecânica
Indutância de magnetização
. (b) Corrente de magnetização
(c)
. ......................................................................... 82
4.24 Manutenção e perda da autoexcitação pela aplicação de carga. (a) Corrente de
=
magnetização. (b) Fluxo magnético. Curva azul – Aplicação de
1.1
(
= 0.0). Curva vermelha – Aplicação de
= 1.175
(
=
0.0). .................................................................................................................... 83
= 1.74
4.25 Variação da frequência elétrica da tensão gerada para
1.05
e aplicação de carga. Curva preta –
= 1.1
= 1.0. Curva azul -
= 0.0
= 1.1
e aplicação de carga. Curva preta –
= 1.1
(
=
. Curva vermelha –
= 0.0. ............... 84
= 1.74
4.26 Variação da frequência elétrica da tensão gerada para
1.05
,
= 0.0
,
=
. Curva ver –
= 0.7). ........................................................................... 84
5.1
Esquema de montagem mecânica e elétrica do SEIG. ......................................... 88
5.2
Diagrama unifilar e esquema de funcionamento da bancada para estudos com
geração assíncrona. ............................................................................................. 89
5.3
Conjunto mecânico MP e GI. .............................................................................. 91
5.4
Montagem mecânica do conjunto MP (esquerda) e GI (direita) e conexão dos
terminais elétricos de potência e sensores de temperatura STe. ............................ 91
xix
5.5
Leiaute do quadro de comando e força da MP e do GI. ........................................ 92
5.6
Leiaute do banco de capacitores BC. ................................................................. 93
5.7 Configuração final dos quadros de comando e força MP/GI (esquerda) e BC (direita).
........................................................................................................................... 94
5.8 Tela do programa desenvolvido em LabView para manipulação e aquisição de dados.
........................................................................................................................... 97
5.9
Superfície de projeto para
= 0.0
. ............................................................. 98
5.10 Resultados experimentais de existência de autoexcitação. Conexão do BC em
= 3.85 . (a) Tensão fase “a”. (b) Velocidade mecânica. .................................. 99
5.11 Simulação do SEIG para as mesmas condições da Figura. 5.10. (a) Tensão fase “a”.
(b) Velocidade mecânica. ................................................................................... 99
5.12 Perda da autoexcitação devido a diminuição da velocidade em
= 20 . (a) Tensão
fase “a”. (b) Velocidade mecânica. .................................................................... 100
5.13 Superfície de projeto da PRAE para
= 1.1
. .............................................. 101
5.14 Resultados experimentais da existência e manutenção da autoexcitação. Aplicação
de 1.1pu de carga em
= 9.75 . (a) Tensão fase “a”. (b) Corrente da carga. (c)
Velocidade mecânica. ........................................................................................ 101
5.15 Simulação do SEIG com aplicação de carga para as mesmas condições da Figura
5.14. (a) Tensão fase “a”. (b) Corrente da carga. (c) Velocidade mecânica. ........ 102
5.16 Resultados experimentais da aplicação de sobrecarga em
autoexcitação) e retirada da mesma em
= 8.85 (com perda da
= 25 (com retomada da autoexcitação).
(a) Tensão fase "a". (b) Corrente Carga. (c) Velocidade mecânica. ..................... 102
5.17 Simulação do SEIG para aplicação de sobrecarga em = 8.85 e retirada da mesma
em = 25 nas mesmas condições da Figura 5.16. (a) Tensão fase "a". (b) Corrente
da Carga. (c) Velocidade mecânica. ................................................................... 103
5.18 Resultados experimentais da variação da frequência elétrica com a aplicação de
sobrecarga (1.4pu) em
= 4.1 e velocidade mecânica
= 1.05
. (a) Tensão
fase "a". (b) Corrente da Carga. .......................................................................... 104
xx
5.19 Comportamento da frequência elétrica com a aplicação da carga no ensaio
experimental mostrado na Figura 5.18. (a) Antes da conexão da carga. (b) Depois da
conexão da carga. .............................................................................................. 104
1.1A Características construtivas e elétricas do Gerador de Indução. .......................... 115
1.2A Circuito equivalente do Gerador de Indução em regime permanente. ................. 116
1.3A Configuração da ligação dos enrolamentos do gerador e ligação dos equipamentos
utilizados no ensaio DC. .................................................................................... 118
1.4A Esquema de ligação do Gerador de Indução e de demais equipamentos para o ensaio
a vazio. .............................................................................................................. 120
1.5A Perdas por atrito e ventilação obtidos a partir do ensaio a vazio. ........................ 122
1.6A Circuito equivalente do gerador de indução no ensaio a vazio e à velocidade
síncrona. ............................................................................................................ 122
1.7A Configuração dos equipamentos no ensaio a vazio e à velocidade síncrona. ....... 123
1.8A Circuito equivalente para o ensaio a vazio à velocidade síncrona. ..................... 124
1.9A Circuito equivalente para o GI com rotor bloqueado. ......................................... 126
1.10A Parâmetros do circuito equivalente e em regime permanente para o GI. ......... 129
1.11A Ensaio a vazio e à velocidade síncrona. (a) Circuito equivalente. (b) Aproximação
do circuito equivalente. .................................................................................. 130
1.12A Diagramas fasoriais para o ensaio a vazio e à velocidade síncrona. (a) Diagrama
fasorial para o circuito equivalente. (b) Diagrama fasorial para a aproximação do
circuito equivalente. ....................................................................................... 131
1.13A Curva de magnetização para o GI. .................................................................. 132
1.14A Variação de
em função da tensão interna Vi'. ........................................... 133
1.15A Variação da tensão Vi' em função de
. ........................................................ 133
Lista de Tabelas
B.1 Parâmetros elétricos do gerador de indução. ....................................................... 135
B.2 Parâmetros mecânicos do gerador de indução. .................................................... 135
xxi
xxii
Lista de Siglas
BC
Banco de Capacitores
C
Chave contatora
CC
Corrente contínua
CLP
Controlador lógico programável
CM
Condição de manutenção da autoexcitação
D
Disjuntor de manobra e proteção
DC
Tensão Contínua
DFIG
Doubly Fed Induction Generator
ENC
Sensor de velocidade do tipo encoder
FP
Fator de Potência
FS
Fator de Sobrecarga
GI
Gerador de Indução
H
Henry
HP
Potência mecânica
Hz
Hertz
IF
Inversor de frequência
IHM
Interface Homem Máquina
MCH
Micro Centrais Hidrelétricas
MP
Máquina Primária
NA
Contato normalmente aberto
NF
Contato normalmente fechado
PCH
Pequenas Centrais Hidrelétricas
PRAE
Potência Reativa de Autoexcitação
PRCC
Potência Reativa Capacitiva de Carga
PGESDE
Pós-Graduação em Engenharia de Sistemas Dinâmicos e Energéticos
PROINFA
Programa de Incentivo as Fontes Alternativas
SEP
Sistema Elétrico de Potência
SEIG
Self-Excited Induction Generator
RO
Região Operativa
RPS
Rotações por segundo
xxiii
xxiv
RPM
Rotações por minuto
SC
Sensor de corrente
SIT
Fusíveis ultrarrápidos
ST
Sensor de tensão
STe
Sensor de temperatura
TC
Transformador de corrente
TTL
Transistor-Transistor Logic
UNIOESTE
Universidade Estadual do Oeste do Paraná
UTFPR
Universidade Tecnológica Federal do Paraná
V
Volts
Vac
Tensão alternada
VAR
Volt-Ampere reativo
Vcc
Tensão contínua
W
Watt
Lista de Símbolos
Capacitor de autoexcitação
Corrente base
̅
Fasor corrente nos capacitores de autoexcitação
Corrente nominal do gerador – ligação estrela
̅
Fasor corrente na resistência de carga
̅
Fasor corrente na indutância de carga
Corrente de estator – eixo direto
Corrente de rotor – eixo direto
Corrente de estator – eixo em quadratura
Corrente de rotor – eixo em quadratura
Corrente de magnetização – eixo direto
Corrente de magnetização – eixo em quadratura
Corrente de magnetização
Corrente de rotor
k
Quilo
Amplitude de corrente
Amplitude de tensão
Constante (234.5 para o cobre eletrolítico com 100% de condutividade)
Indutância base
Indutância de magnetização
Indutância de magnetização máxima
Indutância de magnetização no equilíbrio = 0
Indutância de dispersão do estator
Indutância de dispersão do rotor
M
Mega
Potência base
Potência operativa mínima
Potência operativa máxima
Potência reativa de autoexcitação mínima
Potência reativa de autoexcitação máxima
xxv
xxvi
Resistência de carga
Resistência de estator somada à resistência de carga
Resistência a ser corrigida
Resistência corrigida
RL
Carga elétrica em termos de resistência e indutância
Resistência da carga
Resistência de rotor
Resistência de estator
Região de existência de autoexcitação
Superfície intermediária
Superfície inferior
Superfície superior
Superfície de projeto
s
Frequência complexa
Torque mecânico
Temperatura final para a resistência a ser corrigida
Temperatura inicial para a resistência a ser corrigida
Tensão base
Tensão de fase
Tensão no rotor
Fasor tensão de fase do estator
Tensão do estator – eixo direto
Tensão do rotor – eixo direto
Tensão do estator – eixo em quadratura
Tensão do rotor – eixo em quadratura
Tensão residual de rotor – eixo direto
Tensão residual de rotor – eixo em quadratura
Reatância capacitiva de autoexcitação
Reatância indutiva da carga
Impedância base
Impedância equivalente
Δ
Variação da frequência elétrica
Fluxo magnético de estator - eixo direto
Fluxo magnético de rotor - eixo direto
Fluxo magnético residual de rotor - eixo direto
Fluxo magnético de estator - eixo em quadratura
xxvii
Fluxo magnético de rotor - eixo em quadratura
Fluxo magnético residual de rotor - eixo em quadratura
Fluxo magnético no entreferro
Fluxo magnético de estator
Fluxo magnético de rotor
Frequência base em rad/s
Frequência elétrica
Velocidade do rotor em rad/s
Frequência síncrona em rad/s
Velocidade mecânica nominal em rad/s
Velocidade mecânica mínima em rad/s
Velocidade mecânica máxima em rad/s
Velocidade mecânica operativa
Velocidade mecânica operativa mínima em rad/s
Velocidade mecânica operativa máxima em rad/s
*
Ponto de equilíbrio
xxviii
Capítulo 1
Introdução
1.1 Tipos de Geradores Utilizados em Fontes Alternativas
de Energia
Atualmente as questões ambientais e o desenvolvimento sustentável são discussões de
âmbito global. Os efeitos provocados por tais questões influenciam as políticas
governamentais de vários países os quais estão preocupados, por exemplo, com o
aquecimento global e suas consequências. Baseado em tais fatos, a utilização de fontes
alternativas de energia vem ganhando grande espaço nos sistemas energéticos em todo o
mundo, pois contribuem na diversificação da matriz energética global na tentativa de torná-la
menos dependente de combustíveis fósseis.
No Brasil, o Programa de Incentivo as Fontes Alternativas de Energia (PROINFA),
findado em 2010, buscou incentivar a instalação de centrais eólicas, centrais térmicas a biogás
ou biomassa e pequenas centrais hidrelétricas (PCH). O resultado deste programa foi
significativo, pois trouxe um aumento de aproximadamente 1423MW de potência eólica
instalada entre 2007 e 2010 e cerca de 1191MW de potência instalada em PCH durante o
mesmo período (PROINFA, 2012).
Embora tal aumento de potência seja pequeno quando comparado com a potência total
instalada no Sistema Elétrico de Potência (SEP), os aumentos de potência instalada desta
natureza são grandes se comparados com a potência instalada que faz uso de tais fontes
alternativas antes do PROINFA. Sob o ponto de vista de estudos em sistemas elétricos, o
crescente aumento da utilização de tais fontes conectadas ao SEP, demanda a análise e novos
estudos sobre o impacto que pode ocorrer, sob o ponto de vista de planejamento e operação,
por exemplo, com a inserção de tais fontes em um sistema de potência predominantemente
hidroelétrico.
O crescente aumento da utilização destas fontes promoveu a abertura e a aplicação de
novas tecnologias de geração de energia elétrica. Neste contexto, a energia eólica é a que mais
contribuiu para a difusão no país de novos geradores utilizados para a conversão
eletromecânica de energia. A grande parte dos geradores que operam no sistema elétrico
1
2
brasileiro é do tipo síncrono e tais equipamentos são consagrados por apresentarem excelentes
características de controle quando operam em sistemas interligados ou até mesmo isolados. O
principal inconveniente deste tipo de máquina é que estas podem apresentar custos elevados
de instalação e manutenção e a sua aplicabilidade em pequenos recursos energéticos torna-se
questionável (Wang and Kuo, 2002).
Dentre as novas tecnologias de geração associadas à geração eólica interligada ao
sistema elétrico, destacam-se os geradores síncronos especiais e os geradores de indução com
rotor bobinado. Os geradores síncronos especiais possibilitam a maximização da energia
eólica dentro de uma faixa de variação de velocidade do vento (Tarnowski, 2006). Em
turbinas eólicas, a velocidade das pás do aerogerador é muito inferior à velocidade síncrona e
para que o gerador possa gerar potência a uma determinada frequência da rede, o número de
polos deste tipo de máquina é aumentado, o que o leva a ser chamado de gerador síncrono
especial. Faz parte ainda desta tecnologia um conversor da mesma potência do gerador, cuja
finalidade é permitir o desacoplamento da frequência do gerador da frequência da rede,
permitindo a geração para uma maior faixa de variação de velocidade de vento, o que
caracteriza este tipo de geração como geração a velocidade variável (Tarnowski, 2006).
O outro tipo de gerador mencionado anteriormente e utilizado nestas aplicações é o
gerador de indução com rotor bobinado ou de dupla alimentação, cuja tecnologia é
denominada DFIG – Doubly Fed Induction Generator. Nesta tecnologia existe a necessidade
de uma caixa de amplificação de velocidade para aproximar a frequência elétrica do gerador
da frequência da rede em que está conectado. Esta tecnologia utiliza um conversor de potência
ligado aos enrolamentos do rotor (via anéis coletores) cuja potência é de aproximadamente
25% da potência do gerador.
O DFIG é conectado diretamente à rede elétrica através dos terminais do estator e
também através dos terminais do rotor, via conversor de potência. Isso permite também, como
no caso do gerador síncrono especial, a geração com frequência constante e velocidade de
rotação variável e com controle desacoplado das potências ativas e reativas geradas
(Tarnowski, 2006). Esta tecnologia torna-se atrativa, fato que pode ser verificado pela ampla
utilização da mesma em novos empreendimentos de geração eólica (Tarnowski, 2006;
Akhmatov, 2003; Lara-Anaya et al., 2009).
Uma terceira tecnologia associada inicialmente com a geração eólica, teve início na
Dinamarca em 1980 e trata-se do gerador de indução com rotor em gaiola (GI) (Tarnowski,
2006). Quando ligado em um sistema elétrico, os terminais do estator são conectados
diretamente à rede e como o escorregamento de tais máquinas é função da frequência e da
tensão aplicada ao estator (constante) os geradores de indução com rotor em gaiola e
conectados ao SEP, operam com uma velocidade fixa e um pouco acima da velocidade
síncrona (Tarnowski, 2006).
Nesta configuração não existe a necessidade de conversores de potência, no entanto é
necessária uma caixa de amplificação de velocidade. O principal problema deste tipo de
tecnologia está relacionado com a operação do gerador sempre em velocidade fixa, o que o
3
torna incapaz de extrair a máxima potência para uma faixa de variação de velocidade do
vento. Além disso, necessitam de potência reativa advinda da rede para propiciar sua
autoexcitação o que prejudica a estabilidade de tensão nos pontos da rede elétrica em que são
conectados (Tarnowski, 2006).
Geralmente esse tipo de gerador utiliza banco de capacitores chaveados para diminuir o
impacto causado pelo consumo de potência reativa da rede. Outro problema que este tipo de
gerador propicia é o pobre controle de potência ativa entregue ao sistema, ou seja, quando
ocorrem variações de velocidade de vento (rajadas de vento) surgem grandes variações de
potência gerada. As principais vantagens na aplicação deste tipo de gerador em sistemas
interligados, é que estes equipamentos são robustos, de simples operação e construção,
apresentam elevada relação entre potência e peso, além de exigirem baixa manutenção,
tornando-o uma tecnologia de custos reduzidos (Tarnowski, 2006). A baixa manutenção está
ligada diretamente à inexistência de anéis coletores no rotor da máquina, diferentemente dos
geradores síncronos e do DFIG.
Estudos mais aprofundados sobre as tecnologias DFIG e do GI com rotor em gaiola
conectados em sistemas elétricos podem ser encontrados em (Pereira, 2007; Tarnowski, 2006;
Lara-Anaya et al., 2009; Rocha, 2005; Zanchettin, 2012; Akhmatov, 2003; Rodrigues et al.,
2002).
1.2 Geradores de Indução Operando de Forma Isolada
Embora a tecnologia que adota os geradores de indução com rotor em gaiola conectado
a sistemas de potência esteja praticamente obsoleta face às tecnologias de velocidade variável,
este tipo de gerador ainda apresenta características interessantes quando operado de forma
isolada (Lara-Anaya et al., 2009; Patel, 2006).
Pequenos recursos hidrelétricos denominados de micro centrais hidráulicas (MCH),
pequenos recursos eólicos e pequenas fontes alternativas de geração a biogás ou biomassa e
que operam de forma isolada, necessitam de equipamentos de conversão eletromecânica de
energia que apresentem baixo custo (Singh and Tandon, 2010; Smith, 1996; Scherer et al.,
2011).
Neste contexto é possível observar que os geradores de indução com rotor em gaiola
apresentam grandes vantagens se comparados com geradores síncronos ou com o DFIG, pois
são equipamentos que além de apresentarem baixo custo, são robustos, possuem elevada
relação entre potência e peso, apresentam sistema natural de proteção contra sobrecargas,
exigem pouca manutenção, não necessitam de dispositivos de sincronização e o sistema de
excitação que utilizam é mais simples do que os sistemas de excitação utilizados em máquinas
síncronas (Idjdarene et al., 2010; Chan, 1999; AL-Bahrani and Malik, 1990; Wang and Kuo,
2002).
4
Os geradores de indução com rotor em gaiola apresentam vantagens também em relação
a geradores que possuem imãs permanentes como excitação de campo. Neste tipo de máquina,
a variação da velocidade do rotor provoca a variação linear da tensão terminal gerada. No
caso do gerador de indução, a variação da velocidade do rotor também provoca o aumento da
tensão gerada, porém a variação desta é bem menor. Isso se deve ao fato de que o gerador de
indução opera em um ponto de saturação do fluxo magnético, o que limita as variações da
tensão gerada (Seyoum, 2003).
A aplicação dos geradores de indução encontra espaço em pequenos sistemas de
geração com potência de até 50kW (Marra and Pomilio, 2000) e que não necessitem de uma
regulação apurada de tensão e frequência (Idjdarene et al., 2010), principal problema quando
operado desta forma. Tais geradores podem operar de forma isolada onde não existe
viabilidade econômica da conexão do usuário com as redes de distribuição da concessionária,
como por exemplo, em pequenas comunidades isoladas e pequenas propriedades agrícolas
(Singh and Tandon, 2010).
Quando operam de forma isolada, os geradores de indução necessitam de capacitores
ligados em paralelo aos terminais do estator a fim de propiciar sua autoexcitação. Chan and
Lai (2001) apresentam a sigla SEIG – Self Excited Induction Generator para denominar o
gerador de indução autoexcitado operando de forma isolada.
A autoexcitação é apresentada na literatura como sendo um processo de ressonância e é
analisada geralmente por dois métodos: O primeiro avalia a impedância ou a admitância
resultante do equacionamento do circuito equivalente do gerador de indução em regime
permanente e o segundo faz uma análise dos autovalores da matriz das equações do modelo
dinâmico do mesmo.
As duas formas de análise da autoexcitação em geradores de indução podem ser
verificados, por exemplo, em Elder and Woodward (1983), Tandon et al. (1984), Singh and
Tandon (2010), Bodson and Kiselychnyk (2010a), AL-Bahrani and Malik (1990), Idjdarene et
al. (2010) e vários outros trabalhos citados em Bansal (2005).
1.3 Autoexcitação em Geradores de Indução
A autoexcitação pode ser entendida de uma forma geral, como sendo um processo
ressonante que ocorre entre o magnetismo residual existente no rotor e o capacitor conectado
em paralelo ao estator da máquina. Quando o rotor é acionado por uma máquina primária
(MP), o magnetismo residual do rotor cria uma tensão induzida de pequena amplitude que é
aplicada aos terminais dos capacitores. Esta tensão induzida possibilita a circulação de uma
pequena corrente magnetizante que por sua vez gera um fluxo magnético no entreferro da
máquina. O novo fluxo faz com que a tensão induzida aumente de valor e seja devolvida
novamente aos terminais do estator. Com o rotor do gerador em movimento, este processo
5
ressonante (amplificação da tensão) é repetido até que a reta imposta pela reatância capacitiva
encontre a saturação da máquina, momento em que ocorre a estabilização da tensão (Bhim,
1981; Trap, 2008). A energia cinética fornecida pelo eixo do rotor (torque mecânico) faz com
que ocorra a conversão eletromecânica de energia via entreferro da máquina, mantendo a
autoexcitação e a entrega de potência via estator (Grantham and Mismail, 1989).
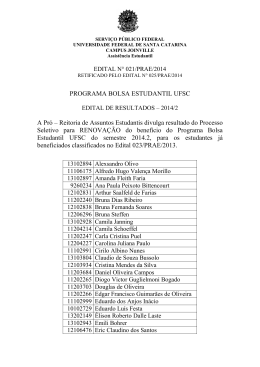
(
A Figura 1.1 mostra a curva da tensão de fase versus a corrente de magnetização
x ) para o gerador utilizado neste trabalho. Esta curva é uma aproximação polinomial
de 3 ordem dos dados obtidos através do ensaio a vazio do gerador (Anexo A). O efeito que
o valor do capacitor provoca na tensão terminal pode ser verificado na Figura 1.1, onde as
retas representam as reatâncias capacitivas que dependem do valor do capacitor e da
frequência elétrica. Se um capacitor de valor C1 for conectado aos terminais do gerador, este
irá operar no ponto P1 cuja tensão de fase é maior que em P2. O ponto P2 é a interceptação da
reta da reatância capacitiva imposta por um capacitor C2 de menor valor que C1. Diante
disso, dependendo do valor do capacitor acoplado aos terminais do estator da máquina, a
curva
x pode ser interceptada em vários pontos e consequentemente a tensão terminal
pode apresentar diferentes valores.
250
P2
P1
Tensão de Fase Vf (V)
200
150
100
Vf x im
50
C1 F
C2 F
C3 F
0
0
2
4
6
8
Corrente de Magnetização im (A)
10
12
Figura 1.1: Possíveis pontos de operação do SEIG.
A reta de maior inclinação da Figura 1.1 é a reta da reatância capacitiva produzida por
um capacitor C3 menor que C2. Para tal capacitância, não existe nenhum ponto de intersecção
com a curva
e desta forma a autoexcitação não ocorre nesta condição.
Embora a análise descrita anteriormente possa ser utilizada para a compreensão de uma
forma bastante simplificada de como ocorre o processo de autoexcitação, esta análise não leva
em consideração a carga conectada nos terminais do gerador. Além disso, os parâmetros do
gerador e a velocidade do rotor, que também são indispensáveis em um estudo mais
aprofundado do processo de autoexcitação, ficam intrínsecos à curva
.
6
Elder and Woodward (1983) estão entre os primeiros autores a explicarem como ocorre
a ressonância e a autoexcitação de uma forma mais aprofundada. O processo é explicado por
eles sem a presença de carga na máquina de indução, ou seja, apenas com o capacitor ligado
em paralelo à mesma. Os autores dividem a análise da autoexcitação em dois circuitos, sendo
que o primeiro é um circuito RLC série cujos parâmetros da máquina envolvidos na análise
são a resistência e a indutância de estator, a indutância de magnetização, além do capacitor de
autoexcitação. A fim de representar a pequena tensão existente gerada pelo magnetismo
residual do rotor, neste circuito é inserida uma fonte de tensão senoidal cuja amplitude
depende do magnetismo residual do rotor e da velocidade do mesmo. O segundo circuito
equivalente proposto por Elder and Woodward (1983), para explicar o processo de
autoexcitação é denominado de circuito assíncrono. Este circuito possui duas malhas que são
divididas pela indutância de magnetização e leva em consideração todos os parâmetros da
máquina. O equacionamento de ambos os circuitos em termos da corrente de rotor leva a uma
equação na forma =
, onde representa a corrente de rotor. Os autores explicam que
a tensão no rotor é nula (curto-circuito) e como a corrente não pode ser, a única forma de se
obter a igualdade da equação descrita anteriormente, é que deve existir alguma condição onde
a impedância equivalente
= 0. A impedância equivalente do circuito resulta em um
polinômio de terceira ordem em s (frequência complexa), cujos parâmetros dependem da
velocidade do rotor, do capacitor de autoexcitação e dos demais parâmetros do gerador.
Dependendo da velocidade do rotor e do valor do capacitor conectado aos terminais do
gerador, uma das raízes do polinômio possui parte real positiva o que caracteriza instabilidade
e por consequência autoexcitação.
Murthy et al.(1982) analisam a autoexcitação através do equacionamento do circuito do
gerador de indução em regime permanente e com carga resistiva. A análise também é
realizada sobre a impedância equivalente do circuito que resulta em um polinômio de terceira
ordem onde
é uma função da velocidade do rotor
e da reatância de magnetização
.
Um método interativo (Newton-Raphson) é responsável por encontrar pelo menos uma raiz
do polinômio com parte real positiva, sendo mantida constante a velocidade do rotor e sendo
variada a reatância de magnetização. A parte imaginária da raiz que possui parte real positiva
é uma aproximação da frequência elétrica da tensão gerada, como exposto também em Elder
and Woodward (1983). Em Tandon et al. (1984) e Haque (2009) é feita a mesma análise,
porém uma carga RL é inserida no circuito equivalente do gerador de indução. O resultado é
um polinômio de impedância
de quarta ordem cuja solução (por método interativo)
também retorna a existência da autoexcitação que depende do valor da velocidade, da
reatância de magnetização, dos parâmetros do gerador, da carga e do capacitor de
autoexcitação.
Grantham and Mismail (1989) e Grantham and Seyoum (2008) fazem uma análise do
desempenho em regime permanente e transitório do gerador de indução levando em
consideração o estudo da autoexcitação. O modelo do GI é apresentado nos eixos d e q e o
equacionamento resultante da matriz de impedância do sistema resulta em um polinômio de
oitava ordem. Novamente como apresentado em Elder and Woodward (1983), Tandon et al.
7
(1984) e Haque (2009), a solução do polinômio é obtida através de métodos interativos e
quando pelo menos uma raiz possui parte real positiva, a autoexcitação ocorre.
O gerador de indução operando com cargas desequilibradas e em regime permanente é
estudado em Wang and Huang (2004). Neste trabalho, o modelo do gerador é apresentado em
dois circuitos, o de sequência positiva e o de sequência negativa. Embora os autores mostrem
que a autoexcitação ocorre para determinados valores de capacitância e com velocidade do
rotor constante, o processo de autoexcitação não é analisado. O mesmo ocorre em Neam et al.
(2007) onde o equacionamento do GI é apresentado nos eixos d e q sem carga e as questões
de autoexcitação são apresentadas sob o ponto de vista informativo em termos da variação da
velocidade do rotor e do valor do capacitor conectado aos terminais do estator.
Bodson and Kiselychnyk (2010a) apresentam o modelo dinâmico do gerador de indução
nos eixos d e q considerando carga resistiva, cujo equacionamento resulta em uma matriz de
impedâncias com termos em s. A análise das raízes do polinômio característico desta matriz
resulta em condições analíticas de existência de autoexcitação. A partir das condições
analíticas obtidas, curvas de existência de autoexcitação são traçadas para diferentes valores
de velocidade do rotor, capacitor de autoexcitação e carga resistiva acoplada ao gerador de
indução.
Segundo Elder and Woodward (1983), Murthy et al. (1982), Chan and Lai (2001) e
vários outros autores, a autoexcitação ocorre somente se existir magnetismo residual no rotor.
Bodson and Kiselychnyk (2010a) apresentam outra condição de existência de autoexcitação,
ou seja, além de existir magnetismo residual no rotor, a ocorrência de autoexcitação depende
também de valores máximos de carga imposta ao gerador. Tais valores de carga dependem da
resistência do estator e do fator de acoplamento, que por sua vez depende das reatâncias de
dispersão e de magnetização da máquina. Em Bodson and Kiselychnyk (2010b) é mostrado
que a tensão inicial existente nos capacitores pode promover a autoexcitação mesmo não
havendo magnetismo residual no rotor e dependendo da amplitude da tensão inicial existente
nos capacitores, a autoexcitação pode ocorrer de forma mais rápida ou de forma mais lenta.
Embora os métodos apresentados para a análise da autoexcitação permitam de uma
forma geral, seja do ponto de vista analítico ou através de simulações, que se encontre pelo
menos um valor de velocidade e um valor de capacitor para que ocorra a autoexcitação sob
certa condição de carga, as condições de existência de autoexcitação em geradores de indução
são tipicamente apresentadas na literatura em termos de parâmetros e variáveis da máquina e
da carga que são pouco representativos sob o ponto de vista de estudos em sistemas elétricos
de potência, com isso, o dimensionamento e a aplicação do SEIG ficam dificultados. Sob essa
ótica surgem algumas questões relacionadas ao projeto do SEIG e que impactam diretamente
na utilização desta forma de geração: (i) Como a potência e a característica da carga
influenciam na autoexcitação sob certas condições de velocidade e potência do capacitor de
autoexcitação? (ii) Em que condições a autoexcitação pode ser perdida? (iii) Como os
capacitores de autoexcitação devem ser dimensionados a fim de manter a autoexcitação
dentro de um determinado limite de velocidade mecânica e carga elétrica imposta ao GI? A
obtenção das respostas para tais perguntas motivam esta dissertação.
8
Não é objetivo desta dissertação estudar as questões de desempenho do SEIG nem de
controle da tensão e da frequência do gerador, estando esta focada somente na análise da
existência e garantia da autoexcitação sob determinadas condições operativas de velocidade
mecânica, da potência e do FP da carga acoplada a ele.
Alguns resultados preliminares e que fazem parte desta dissertação são apresentados
em:
Mayer and Reginatto (2012a). Caracterização da Autoexcitação de Geradores de
Indução em Grandezas Usualmente Utilizadas em Sistemas Elétricos de Potência e
Aplicação em Sistemas Isolados de Geração. SBSE, Goiânia, GO, Brasil, 2012.
Mayer and Reginatto (2012b). Condições de Existência de Autoexcitação em
Geradores de Indução Conforme suas Condições Operativas. SEPOPE, Rio de
Janeiro, RJ, Brasil, 2012.
Em Mayer and Reginatto (2012a) as condições analíticas descritas em Bodson and
Kiselychnyk (2010a) são apresentadas em termos de grandezas usualmente utilizadas em
estudos de sistemas elétricos de potência. As variáveis envolvidas no equacionamento e no
processo de autoexcitação como tensão, corrente, potência e velocidade do rotor são
apresentadas em pu sendo adotadas como base as grandezas nominais do próprio gerador.
Neste trabalho a carga elétrica imposta ao GI é apresentada em termos de potência ativa e os
capacitores de autoexcitação são apresentados em termos de potência reativa capacitiva,
denominada potência reativa de autoexcitação. É introduzido também o conceito de região de
existência de autoexcitação, identificando regiões operativas de velocidade mecânica do
gerador de indução nas quais a autoexcitação é garantida.
O trabalho apresentado em Mayer and Reginatto (2012a), é ampliado em Mayer and
Reginatto (2012b). Neste último estudo, a carga passa a conter componentes ativas e reativas
indutivas, o que possibilita analisar a existência de autoexcitação para uma faixa de velocidade mecânica do rotor, de potência reativa de autoexcitação e carga com distintos valores de
FP. Uma análise inicial da variação da frequência elétrica em função do aumento ou da diminuição da potência reativa de autoexcitação também é apresentada.
1.4 Objetivos do Trabalho
1.4.1 Objetivo Geral
O objetivo desta dissertação é desenvolver ferramentas que auxiliem no projeto do
SEIG sob o ponto de vista da garantida de existência da autoexcitação em torno de condições
operativas de velocidade, de potência e do FP da carga.
9
1.4.2 Objetivos Específicos
Os objetivos específicos abordados neste trabalho são:
Apresentar o modelo matemático do gerador de indução e da carga em termos de
potência e em pu, objetivando o estudo da autoexcitação.
Mostrar a influência que a carga, a velocidade e os capacitores de autoexcitação
exercem sobre a existência da autoexcitação em termos de unidades mais
usualmente utilizadas em sistemas elétricos de potência, facilitando o
dimensionamento do SEIG.
Apresentar as condições de existência de autoexcitação em torno das condições
operativas do GI, isto é, para valores de velocidade e carga compatíveis com as
condições nominais do gerador.
Apresentar regiões de existência de autoexcitação nas quais a autoexcitação é
garantida para determinadas condições operativas do GI em termos de velocidade,
carga e fator de potência.
Utilizar o modelo dinâmico do gerador para simular e verificar as condições de
existência de autoexcitação bem como a dinâmica do processo da autoexcitação da
máquina, conforme as condições operativas do gerador de indução.
Projetar e desenvolver um protótipo de uma bancada para estudos com geração
assíncrona (SEIG).
Utilizar a bancada desenvolvida para aquisitar dados experimentais das condições
de existência de autoexcitação do SEIG em torno das condições operativas e
confrontar com as análises teóricas desenvolvidas.
1.5 Estrutura do Trabalho
Este trabalho está organizado em seis capítulos cujos são explicitados a seguir.
No Capítulo 2 é apresentado o modelo matemático do SEIG nos eixos d e q em pu e
tanto a carga quanto os capacitores de autoexcitação são apresentados em termos de potência.
Desta forma o modelo matemático é apresentado em unidades usualmente utilizadas em
estudos de sistemas elétricos de potência, o que facilita a análise da existência de
autoexcitação. Neste capítulo são apresentadas também as variáveis que influenciam no
processo de autoexcitação do GI e é introduzido o conceito das regiões de existência da
autoexcitação.
O Capítulo 3 aborda as condições de existência da autoexcitação em torno das
condições operativas do gerador de indução. Neste capítulo é mostrada a faixa de existência
de autoexcitação em torno das regiões operativas de velocidade mecânica e potência da carga
10
para diferentes valores de FP, além disso, são apresentados procedimentos que auxiliam no
projeto do SEIG.
O quarto capítulo apresenta o modelo dinâmico do SEIG com saturação e são
apresentadas simulações que mostram que a existência da autoexcitação em torno das regiões
operativas é condizente com as análises teóricas desenvolvidas, e estas, portanto, podem ser
utilizadas no projeto do SEIG.
No Capítulo 5 é apresentado em linhas gerais o projeto e a execução da bancada para
estudos com geração assíncrona. Com a utilização desta bancada, são obtidos resultados
experimentais que são confrontados com os resultados teóricos obtidos anteriormente.
O capítulo seis apresenta as conclusões e contribuições do trabalho.
Capítulo 2
Modelo Matemático do SEIG para o
Estudo do Processo de Autoexcitação
Este capítulo desenvolve o modelo matemático do SEIG adequado para os estudos das
condições de existência de autoexcitação. A modelagem do SEIG inclui o gerador de indução,
os capacitores de autoexcitação e a carga conectada a seus terminais.
Inicialmente é apresentada a estrutura física do SEIG que é composto através da
conexão do gerador de indução com os capacitores de autoexcitação e com as cargas elétricas.
A seção 2.2 desenvolve o modelo do gerador de indução nos eixos d e q e em pu sem levar em
consideração a conexão da carga ou dos capacitores de autoexcitação. Com isto, a condição
de equilíbrio = 0 é analisada e são apresentadas as possíveis formas de autoexcitação. Na
seção 2.3 os capacitores de autoexcitação e a carga elétrica conectada aos terminais do
gerador são apresentados e modelados em termos de potência e em pu.
O modelo completo do SEIG resultante da conexão da carga e dos capacitores de
autoexcitação ao modelo do gerador de indução é apresentado na seção 2.4. A partir disso, na
seção 2.5 são mostradas as condições de existência da autoexcitação e as variáveis que
influenciam na mesma. As regiões de existência da autoexcitação são definidas na seção 2.6 e
as conclusões do capítulo são apresentadas na seção 2.7.
2.1 Esquema de Ligação do SEIG
Quando operado de forma interligada ao SEP, o GI consome potência reativa da rede
que está conectado a fim de propiciar sua autoexcitação (Patel, 2006) e quando operado de
forma isolada, sua autoexcitação é obtida através da conexão de capacitores aos terminais do
estator da máquina. A figura 2.1 mostra o esquema de ligação típica de um SEIG.
Na Figura 2.1,
representa o torque mecânico fornecido pela máquina primária,
é
a nomenclatura designada para o banco de capacitores de autoexcitação, RL representa a
carga em termos de resistência e indutância e é o fasor tensão de fase de estator para uma
11
12
das fases do GI.
Em sistemas reais, a máquina primária depende da fonte primária de energia sendo
explorada pelo gerador. Na Figura 2.1, a nomenclatura MP representa uma máquina primária
genérica que pode ser eólica, hidráulica ou térmica.
Figura 2.1: Esquema de ligação típica do SEIG.
2.2 Modelo Matemático do Gerador de Indução para o
Estudo da Autoexcitação
O modelo matemático para a máquina assíncrona operando como gerador ou como
motor é praticamente o mesmo, salvo algumas considerações no que diz respeito ao torque e
ao fluxo de potência. O fluxo de potência é considerado positivo saindo da máquina e o torque
é positivo quando este é aplicado ao eixo do rotor via MP. A modelagem do gerador de
indução com rotor em gaiola é obtida fazendo-se algumas considerações típicas do estudo de
máquinas elétricas, como simetria elétrica e espacial entre as três fases do estator e do rotor,
distribuição senoidal do fluxo no entreferro, circuito magnético linear e perdas magnéticas e
mecânicas nulas (Krause et al., 2002; Reginatto, 2006). O circuito da Figura 2.2, representa o
modelo do gerador de indução nos eixos d e q considerando o referencial estacionário, em
termos de um circuito elétrico equivalente.
As equações de fluxo são descritas por
=
=
⎧
⎨
⎩
=
=
+
+
+
+
+
+
(2.1)
onde =
+
e
=
+ . Os valores
e
representam os fluxos residuais
do rotor quando as correntes de estator e rotor são nulas, ou seja,
=
|
e
=
| .
13
Figura 2.2: Circuito que representa o modelo do gerador de indução. (a) Eixo d. (b) Eixo q.
Considerando a velocidade do rotor
constante e equacionando as malhas dos
circuitos (a) e (b) da Figura 2.2 é possível escrever
−
−
−
+(
+
+
)
−
−
+(
+
−
−
+
)
−
+
−
=0
(0) +
+
+ ̇
− −
)
−
+(
+
+
(0) +
+
−
+ ̇
+
(0) = 0
(2.2)
=0
+
+
(2.3)
(0) = 0
+ ̇
+
+
+
−
+
=0
(0) +
+ ̇
+(
(0) = 0
(2.4)
=0
+
)
−
+
(2.5)
14
(0)+
+
(0) = 0,
onde
e
representam respectivamente as resistências de rotor e estator,
de magnetização e
é o número de pares de polos.
é a indutância
Os termos que contém
e
nas equações (2.3) e (2.5) tornam-se tensões
residuais, pois são rotacionados pelo rotor com velocidade . Portanto, tais termos podem
ser escritos na forma
=
−
(2.6)
=
(2.7)
.
Como o rotor do gerador de indução é em gaiola (curto-circuito), as tensões
são nulas.
e
Substituindo as equações (2.6) e (2.7) em (2.3) e (2.5) respectivamente, as equações
(2.2) a (2.5) resultam no sistema matricial
−
+
+
(2.8)
=0
onde
⎡−
=⎢
⎢
⎣
⎤
⎥,
⎥
⎦
(
+
)
0
(
=
0
−
⎡
= ⎢
⎢
⎣
+
0
(
+
−
⎡
⎢
=⎢
⎢
⎣
⎤
⎥,
⎥
⎦
0
)
,
)
(
(0) +
(0) +
(0) +
(0) +
+
)
(0)
⎤
(0)⎥
(0) ⎥.
⎥
(0)⎦
As correntes iniciais nas indutâncias , e podem ser consideradas nulas, portanto
= 0. Com esta consideração a equação (2.8) pode ser escrita na forma
−
+
= 0.
Nas equações (2.8) e (2.9) ainda resta definir os valores de
(2.9)
e
para completar o
15
modelo do SEIG. Estes valores dependem da carga conectada ao gerador e serão incorporados
ao modelo nas seções seguintes.
Considerando a potência trifásica
como potência base, a tensão RMS entre fases
como a tensão base e a frequência nominal
do gerador como a frequência base, a
impedância base, a corrente base e a indutância base são definidas por
=
=
,
=
e
(2.10)
.
(2.11)
Dividindo as resistências e as indutâncias de (2.2) a (2.5) por
e
respectivamente, a
matriz pode ser reescrita em valores por unidade. Por questão de simplicidade a matriz
em pu continua a ser chamada da mesma forma.
2.2.1 Estabilidade do Equilíbrio
=
para a Análise do Processo de
Autoexcitação em Geradores de Indução
Nesta seção considera-se que o gerador esta conectado a uma carga resistiva de valor
. Com isso a equação (2.9) pode ser reorganizada na forma
̇+
+
(2.12)
= 0,
onde
0
=
−
0
,
+
0
0
=
−
=
0
0
0
+
0
0
0
0
0
0
0
0
0
0
0
.
,
⎡
= ⎢
⎢
⎣
⎤
⎥,
⎥
⎦
̇
⎡ ̇ ⎤
̇ = ⎢ ⎥
⎢ ̇ ⎥
⎣ ̇ ⎦
16
A equação matricial (2.12) pode ser escrita em termos de corrente como variáveis de
estado e resulta em
̇=
−
(2.13)
.
Se = 0, então = 0 será um ponto de equilíbrio do sistema (2.13). O equilíbrio = 0
é o ponto de equilíbrio onde todas as correntes envolvidas no circuito da Figura 2.2 são nulas.
Embora os circuitos (a) e (b) da Figura 2.2 mostram o gerador com os terminais do estator
sem a conexão de nenhum outro elemento (carga elétrica ou capacitor de autoexcitação), se
existir magnetismo residual no rotor do gerador existirão correntes circulando pelo rotor do
mesmo. Logo, no equilíbrio = 0 o magnetismo residual é considerado nulo.
A autoexcitação ocorre quando o ponto de equilíbrio = 0 torna-se instável devido aos
valores dos parâmetros do GI, da carga e dos capacitores de autoexcitação quando estes são
conectados aos terminais do gerador (Olorunfemi, 1995). Todos os parâmetros do gerador
podem ser considerados a princípio constantes, com exceção da indutância de magnetização
que varia com a corrente de magnetização
. Logo, dependendo do valor inicial da
indutância de magnetização, denominada de
, da carga e dos capacitores de autoexcitação,
o ponto de equilíbrio = 0 torna-se instável e o processo de autoexcitação ocorre.
Bodson and Kiselychnyk (2012) analisam a estabilidade do SEIG em torno do ponto de
equilíbrio = 0 (designado pelo símbolo *) que pode ser obtido fazendo V = 0 na equação
(2.13). Desta forma, a análise do equilíbrio em torno deste ponto (I = I ∗ + δI) resulta em
(
∗
+
) ∗̇ +
̇ =− (
∗
+
)(
∗
+
).
(2.14)
Usando o fato que ∗ = 0 e ∗̇ = 0 e desconsiderando os termos de segunda ordem que
surgem dos termos multiplicativos de (2.14) como apresentado por Bodson and Kiselychnyk
(2012), o sistema em torno do ponto de equilíbrio resulta em
( ∗)
̇ = − ( ∗) .
(2.15)
O sistema é estável se todos os autovalores da matriz ∗ apresentada na equação (2.16)
possuírem parte real negativa (Bodson and Kiselychnyk, 2012). Se um dos autovalores
apresentar parte real positiva, ocorre a instabilidade e a autoexcitação é estabelecida.
17
∗
= − ( ∗)
( ∗ ).
(2.16)
É possível observar que ( ∗ ) e ( ∗ ) correspondem às matrizes B e A da equação
(2.13) para
=
. A existência de magnetismo residual no rotor do gerador desloca o
ponto de equilíbrio para ≠ 0. As condições de estabilidade do ponto de equilíbrio, neste
caso, diferem de (2.16) e são desenvolvidas em Bodson and Kiselychnyk (2012). Estas
condições não são consideradas neste trabalho por serem pouco representativas para fins de
projeto do SEIG, foco principal deste trabalho. Como será visto adiante, tipicamente
cresce para valores de corrente próximos de zero, de maneira que garantir a autoexcitação
com
=
, tende a garantir a existência de autoexcitação para este novo ponto de
equilíbrio que ocorre quando o magnetismo residual deixa de ser nulo.
Outra forma de verificação da existência da autoexcitação é equacionar o circuito da
Figura 2.2 em termos de impedância (Seyoum, 2003). Considerando que a indutância de
magnetização e a velocidade são constantes, a equação (2.13) é linerar e invariante no tempo.
Aplicand a transformada de Laplace, considerando as correntes iniciais todas nulas, a equação
(2.13) pode ser escrita na forma
(
∗
+
∗)
( )=
.
(2.17)
onde ∗ = ( ∗ ) e ∗ = ( ∗ ). O desenvolvimento do primeiro termo entre parêntesis do
lado esquerdo da equação (2.17) resulta em uma matriz ∗ denominada matriz impedância
∗
=(
∗
+
∗)
.
(2.18)
Igualando o determinante da matriz ∗ a zero é possível obter um polinômio em s e o
estudo das condições de existência de raízes com parte real positiva para este polinômio são
suficientes para determinar a existência da autoexcitação (Bodson and Kiselychnyk, 2010a;
Seyoum, 2003).
É possível observar que as equações (2.16) e (2.18) representam a mesma condição de
estabilidade o que mostra que estudar os autovalores da matriz impedância é equivalente ao
estudo da estabilidade do ponto de equilíbrio = 0, para fins de determinação de existência
da autoexcitação.
A matriz impedância se diferencia da matriz da matriz da equação (2.9) apenas pelas
alterações que ocorrem nos valores de , e
que passam a ser denominadas de
,
e
e da resistência da carga
acoplada aos terminais do estator.
A apresentação da equação (2.17) na forma matricial é apresentada na equação (2.19).
18
(
+
+
)
0
(
0
−
+
0
0
)
(
+
+
)
−
(
+
0
⎤
−
⎥=
0
⎥
⎦
⎡
.⎢
⎢
) ⎣
(2.19)
O sistema de equações provenientes de (2.19) pode ser resolvido para qualquer valor de
corrente através da regra de Cramer (Seyoum, 2003). Para , por exemplo,
=
(
0
⎡
−
⎢
⎢ 0
⎣
+
+
0
(
+
0
(
+
+
−
)
)
(
+
0
(
0
−
0
)
−
+
0
⎤
⎥
⎥
)⎦
0
=
det [ ]
det [ ∗ ]
(2.20)
)
(
+
+
)
(
+
)
A matriz
do numerador da equação (2.20) possui os parâmetros do gerador no
equilíbrio = 0, tensões residuais e velocidade do rotor. O determinante desta matriz afeta a
amplitude da corrente gerada (Seyoum, 2003). Outro fator que deve ser analisado no
determinante de é que se as condições iniciais do vetor
forem todas nulas, como de fato
ocorre no equilíbrio = 0, o det é nulo e a autoexcitação não ocorre.
Na equação (2.20) é possível observar que mesmo havendo magnetismo residual, se o
determinante da matriz ∗ não possuir raízes com parte real positiva, a autoexcitação não
ocorre, pois neste caso
, e as demais variáveis não apresentariam comportamento
divergente ao longo do tempo. A análise do determinante da matriz impedância para o caso
onde uma carga resistiva é conectada aos terminais do gerador é feita na seção 2.2.2.
2.2.2 Análise do Determinante da Matriz Impedância do Gerador de
Indução e Formas de Autoexcitação
Na seção 2.2.1 foi verificado que se houver instabilidade do equilíbrio = 0 a
autoexcitação pode ocorrer. A autoexcitação desenvolvida a partir da existência de
magnetismo residual no rotor chama-se autoexcitação espontânea (Bodson and Kiselychnyk,
2010b).
A ordem do polinômio em s que resulta do determinante da matriz ∗ da equação (2.18)
pode ser reduzida através da simplificação da matriz, que pode ser reescrita em termos de
variáveis complexas (Bodson and Kiselychnyk, 2010a). O sistema matricial apresentado na
19
equação (2.19) pode ser escrito na forma
(
+
)
−
=
onde
(
+
+
.
)−
+
+
= −
0
+
,
(2.21)
.
A matriz complexa de dimensão 2x2 da equação (2.21) é designada por ∗ e o
determinante desta matriz possui duas raízes complexas conjugadas, ao passo que a matriz
4x4 ∗ da equação (2.19) possui determinante com quatro raízes reais.
O polinômio P(s) do determinante de
( )=
∗(
)=
∗
+(
resulta em
) +(
+
+
)
(2.22)
onde
=
−
=
+
=(
−
)
=
=−
(2.23)
O método de Routh-Hurwitz pode ser utilizado para o estudo da estabilidade de um
sistema, pois determina a existência ou não de raízes de um polinômio com termos reais no
lado direito do plano complexo. Quando o polinômio possui termos imaginários, uma
extensão do método de Routh-Hurwitz para polinômios complexos, apresentado por Frank
(1946) pode ser aplicado para esta análise.
Segundo Frank (1946), um polinômio com termos complexos apresenta todas as suas
raízes no lado esquerdo do plano complexo se e somente se todos os seus menores mínimos
Δ , Δ , Δ forem positivos. Para um polinômio de segunda ordem na forma
( )=
os mínimos menores resultam em
+(
+
) +(
+
)
(2.24)
20
Δ =
(2.25)
Δ =
1
−
O termo
da equação (2.23) é sempre positivo, pois
=
+
logo
.
é maior que
. Se o termo
é sempre positivo o termo
negativo.
e
=
,
será sempre
Para a análise de um polinômio com termos complexos utilizando o método de RouthHurwitz, o termo
deveria ser 1 como mostrado no polinômio (2.24). Embora o valor de
não seja unitário, ele é positivo e a análise dos menores mínimos Δ e Δ são suficientes
(Bodson and Kiselychnyk, 2010a). Os menores mínimos para o polinômio (2.22) resultam
em:
Δ =
(2.26)
Δ =
1
−
O menor mínimo Δ é positivo, pois o resultado de
número positivo. Resolvendo o determinante Δ ,
Δ = −
−
(
)
+
é sempre um
(2.27)
e como
e
são negativos, o menor mínimo Δ será sempre positivo indiferente do valor
da velocidade mecânica do rotor.
Este fato é óbvio, pois a análise da matriz impedância do GI apresentada para este caso
foi desenvolvida com a máquina com uma carga resistiva e sem os capacitores de
autoexcitação. Se uma carga reativa indutiva for conectada aos terminais do gerador, as raízes
do polinômio característico do sistema ainda permanecem todas no lado esquerdo do plano
complexo, independentemente do valor de velocidade .
O gráfico da Figura 2.3 mostra a localização das raízes 1 e 2 do polinômio da matriz
impedância para variações do valor da indutância de magnetização
e da velocidade . A
seta vertical indica o sentido do aumento da velocidade. Pode-se observar que a raiz 1 muda
de posição de forma significativa devido ao aumento ou a diminuição da velocidade . A
raiz 2 sofre uma variação quase que imperceptível de posição devido ao aumento ou a
diminuição de
. A seta horizontal indica o sentido do aumento da indutância de
21
magnetização para ambas as raízes. Observa-se que quanto maior o valor de
para a direita), mais as raízes 1 e 2 aproximam-se do eixo imaginário.
(da esquerda
Quando capacitores são conectados aos terminais do GI, a matriz impedância aumenta
sua dimensão para três. Ao ser acionado com uma determinada velocidade mecânica
e
dependendo das condições iniciais ( ≠ 0), a terceira raiz (complexa conjugada) aloca-se no
semiplano direito do plano complexo e a autoexcitação ocorre. A conexão dos capacitores no
GI altera a forma do vetor , pois podem existir tensões iniciais nos capacitores de
autoexcitação, fato que será apresentado na seção 2.4.
A tensão inicial proveniente dos capacitores é capaz de produzir uma corrente inicial
nos eixo d e q que por sua vez produz uma corrente inicial de magnetização capaz de
promover também a autoexcitação. Quando a autoexcitação inicia-se através da aplicação de
uma tensão no estator do gerador via capacitores, ela é chamada de autoexcitação forçada.
4.5
4
3.5
Aumento
de r
Raiz 1
Eixo Imaginário
3
2.5
2
1.5
Aumento
de Lm0
1
0.5
Raiz 2
0
-0.06
-0.05
-0.04
-0.03
-0.02
Eixo Real
-0.01
0
Figura 2.3: Posição das raízes do polinômio da matriz impedância em função da variação de
e
.
2.3 Parametrização da Carga e dos Capacitores de
Autoexcitação em Termos de Potência e Tensão
Nominais
Geralmente na literatura a carga e os capacitores de autoexcitação conectados ao SEIG
aparecem em termos pouco representativos do ponto de vista de estudos de sistemas elétricos.
Em Haque (2010a) apenas a carga é apresentada em termos ativos e reativos e o estudo não
analisa o processo de autoexcitação. A parametrização da carga e dos capacitores de
autoexcitação em termos de potência e em pu, permite que uma visão mais clara das
22
condições de existência da autoexcitação do SEIG possa ser alcançada. Desta forma, tanto a
carga quanto os capacitores de autoexcitação são modelados em termos de impedância
constante.
A Figura 2.4 mostra o esquema de conexão de uma carga RL série nos terminais de uma
das fases do gerador de indução.
Figura 2.4: Circuito por fase com os capacitores de autoexcitação e carga RL.
Igualando as impedâncias vistas pela tensão
no circuito da Figura 2.4, a carga RL
pode ser escrita em termos de sua própria potência aparente nominal
e tensão nominal .
A potência aparente nominal representada pelos seus termos ativos
e reativos
pode
ser verificada na equação
=
+
.
(2.28)
A equação (2.29) mostra a potência aparente em função da tensão nominal.
=
+
=
+
−
(2.29)
Igualando as partes reais e imaginárias da equação (2.29) aos respectivos termos que
contém
e
, a resistência e a indutância da carga podem ser escritas em termos de
potência ativa e reativa respectivamente
=
,
(2.30)
23
=
.
2
(2.31)
O termo que aparece no denominador da equação (2.31) é a frequência nominal da carga.
Realizando um procedimento similar para os capacitores de autoexcitação e
considerando sua potência reativa nominal
, a capacitância de autoexcitação
pode ser
escrita na forma
=
.
2
(2.32)
Na prática cargas capacitivas não são comuns, porém o equacionamento da carga em
termos de RLC generaliza a conexão de cargas ativas, reativas capacitivas e indutivas no
gerador de indução. No caso de conexão de cargas capacitivas aos terminais do GI, esta pode
ser somada diretamente aos capacitores de autoexcitação e resulta em uma capacitância
equivalente em termos de potência reativa capacitiva
=
+
2
.
(2.33)
Na equação (2.33) a parcela
representa a potência reativa capacitiva dos capacitores
de autoexcitação, chamada deste ponto em diante de potência reativa de autoexcitação
(PRAE). A parcela
representa a parcela de potência reativa capacitiva de uma eventual
carga capacitiva, designada deste ponto em diante por potência reativa capacitiva de carga
(PRCC).
2.4 Acoplamento da Carga e dos Capacitores de
Autoexcitação ao GI
A conexão da carga e dos capacitores de autoexcitação aos terminais do GI resulta nos
circuitos (a) e (b) da Figura 2.5
Aplicando a lei das correntes de Kirchhoff para os nós 1 e 2 dos circuitos (a) e (b) da
Figura 2.5 e utilizando a transformada de Laplace, é possível escrever as equações das
correntes nos ramos paralelos da carga e do capacitor de autoexcitação nos eixos d e q.
24
+
+
+
+
(0) +
(0) = 0
(2.34)
+
+
+
+
(0) +
(0) = 0
(2.35)
Figura 2.5: Conexão da carga e dos capacitores de autoexcitação nos terminais do GI. (a)
Eixo d. (b) Eixo q.
(0) representam as correntes iniciais nos elementos indutivos da
(0) e
(0)
carga e tais termos podem ser considerados nulos. Os termos
representam as tensões iniciais existentes nos capacitores de autoexcitação, ou seja
Os termos
(0) e
=
|
(2.36)
=
|
(2.37)
Com o auxílio das equações (2.36) e (2.37), as equações (2.34) e (2.35) podem ser
reescritas de forma mais simplificada
+
(
+
+
/ )+
=0
(2.38)
+
(
+
+
/ )+
=0
(2.39)
25
Nas equações (2.38) e (2.39), , e
representam as admitâncias em termos de
potência para as parcelas ativas e reativas da carga. Tais admitâncias são definidas por
=
1
=
1
⇒
=
⇒
=
(2.40)
2
.
(2.41)
A PRAE em termos de admitância é apresentada por
= 1/
⇒
2
=
=
+
2
.
(2.42)
Se as equações (2.40), (2.41) e (2.42) forem multiplicadas respectivamente por
1/
, tais admitâncias ficam expressas em pu.
,
e
Inserindo as equações (2.38) e (2.39) na equação matricial apresentada em (2.9), as
equações que representam o SEIG com carga e com os capacitores de autoexcitação resultam
na equação matricial (2.43). A matriz 6x6 desta equação é a matriz impedância para o SEIG,
designada por
.
( +
⎡
⎢
⎢
1
⎢
⎢
0
⎢−
⎢
⎢
0
⎣
)
(
+
0
0
−
0
−1
0
)
(
+
0
+
0
0
0
)
(
0
0
+
1
)
(
0
0
0
0
+
−1
0
0
)
(
+
+
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
)⎦
⎡
⎢
⎢
⎢
⎢
⎣
−
⎤ ⎡
−
⎥ ⎢
⎥=⎢ 0
⎥ ⎢
⎥ ⎢−
⎦ ⎣ 0
⎤
⎥
⎥
⎥
⎥
⎦
(2.43)
2.5 Condições de Existência de Autoexcitação
Na seção 2.2.2 verificou-se que a análise das raízes do polinômio do determinante da
matriz impedância possibilita identificar a existência da autoexcitação. O determinante da
matriz
resulta em um polinômio em s de oitava ordem. Se a matriz for reduzida
reescrevendo-se a equação (2.43) em termos de variáveis complexas na forma
26
(
+
−
)
(
+
−1
0
)−
1
0
+
.
+
+
+
+
⎡
= ⎢⎢ −
⎢
⎣−
0
+
−
⎤
⎥
⎥
⎥
⎦
(2.44)
o polinômio do determinante desta matriz também é reduzido.
A matriz 3x3 da equação (2.44) é denominada por
e seu determinante resulta
em um polinômio em s de quarta ordem com coeficientes complexos. O polinômio deste
determinante é apresentado por
( )=
+ (
+
=
(
)+
)+ (
+
(
)+
+
)
(
+
)+
(2.45)
onde,
=(
−
)
=(
−
)
=(
−
=(
=
= −(
)
−
+
+(
)
)
)−(
)
−
−
+
+(
+
+
= −(
)
+
= −((
+(
)
=−
+
+
)
+
)
−
)
=
=−
.
(2.46)
Quando a carga conectada aos terminais do gerador é puramente ativa, o determinante
da matriz
reduz-se a um polinômio de terceira ordem. A análise dos menores
mínimos Δ , Δ e Δ deste polinômio, possibilita encontrar expressões analíticas em termos
de velocidade do rotor e valor de capacitância de autoexcitação para que existam raízes com
parte real positiva e, portanto, autoexcitação (Bodson and Kiselychnyk, 2010a).
Como o determinante da matriz
resulta em um polinômio de quarta ordem,
condições analíticas de verificação de existência de raízes com parte real positiva não são
possíveis de serem obtidas. Devido a isso, as condições de existência da autoexcitação podem
ser obtidas por meio de soluções numéricas com a implementação de um algoritmo
desenvolvido conforme mostra o fluxograma da Figura 2.6.
O algoritmo consiste em verificar para quais condições de carga em termos de potência
e FP, de velocidade do rotor
e de PRAE, existe pelo menos uma das raízes (complexa
27
conjugada) do determinante de
com parte real positiva.
Todos os resultados obtidos deste ponto em diante, dizem respeito a uma máquina
específica cujos parâmetros e características podem ser verificadas nos Apêndices A e B.
A utilização do algoritmo permite visualizar também o movimento das raízes do
polinômio (2.45), que pode ser visualizado na Figura 2.7. Nesta figura o SEIG está com carga
nula e velocidade mecânica nominal. Nota-se que uma das raízes é nula, o que indica que o
polinômio (2.45) torna-se de terceira ordem para os casos onde a carga é nula ou puramente
ativa como mencionado anteriormente (Bodson and Kiselychnyk, 2010a). As setas indicam o
movimento das raízes em função do aumento da PRAE e nota-se que apenas a raiz 1 (para
certos valores de PRAE) passa para o semiplano direito do plano complexo, o que indica a
autoexcitação.
Figura 2.6: Fluxograma do algoritmo implementado.
Na seção 2.2.2 foi mostrado que quando uma carga ativa está conectada aos terminais
do GI sem a conexão de capacitores de autoexcitação, as raízes movimentam-se ao longo do
plano complexo com a variação de
e de . Na prática a indutância de magnetização varia
de um valor inicial
até um valor final
que depende do valor da corrente de
magnetização. Esta característica impõe ao SEIG a estabilização da tensão através da
saturação de
e será mais bem analisada no Capítulo 4.
28
25
20
Eixo Imaginário
15
10
Raiz 1
5
0
-5
-10
-15
-20
-0.25
-0.2
-0.15
-0.1
Eixo Real
-0.05
0
Figura 2.7: Localização das raízes de P(s) em função da variação da PRAE.
A Figura 2.8 mostra para a mesma variação da PRAE utilizada no gráfico da Figura 2.7
o que ocorre com a raiz 1 quando
possui seu valor muito baixo. É possível observar que
independente do aumento da PRAE, nenhuma raiz consegue atingir o semiplano direito.
5
4
3
Eixo Imaginário
2
1
0
Raiz 1
-1
-2
-3
-4
-5
-6.6
-6.4
-6.2
-6
-5.8
Eixo Real
-5.6
-5.4
-5.2
-3
x 10
Figura 2.8: Localização das raízes de P(s) em função da variação da PRAE com baixo valor de
.
A localização da raiz 1 em função da variação da PRAE, considerando a velocidade mecânica
nominal e um
que propicia a autoexcitação pode ser observada na Figura 2.9. Nesta
figura a seta indica a direção da raiz em função do aumento da PRAE e é possível observar
que a autoexcitação fica compreendida entre um valor mínimo e máximo de PRAE, definidos
por
e
. Portanto, se a potência reativa de autoexcitação, ou uma carga
29
capacitiva de elevado valor for conectada aos terminais do GI, a autoexcitação também pode
ser perdida.
1.05
1
0.95
PRAEmin
Eixo Imaginário
0.9
0.85
0.8
PRAEmax
0.75
0.7
0.65
0.6
-0.02
0
0.02
0.04
Eixo Real
0.06
0.08
0.1
Figura 2.9: Localização da Raiz 1 em função do aumento da PRAE.
Quando a velocidade mecânica do rotor
sofre variações, a raiz 1 responsável pela
instabilidade do sistema e, portanto, da autoexcitação, também muda de posição. A Figura
2.10 mostra a localização da raiz 1 com a variação da velocidade .
3
2.5
r max
Eixo Imaginário
2
1.5
r min
1
0.5
0
-0.5
0
0.05
0.1
Eixo Real
0.15
0.2
Figura 2.10: Localização da Raiz 1 em função da variação de
.
Nesta figura foi considerado um
e uma PRAE que propiciam a autoexcitação e a
seta indica a direção da raiz com o aumento da velocidade do rotor. Nota-se que existem
limites de velocidade mecânica denominados de
e
para que a autoexcitação
ocorra.
30
A Figura 2.11 sintetiza as variáveis que influenciam no processo de autoexcitação do
SEIG. O valor de
é a primeira condição que aparece de cima para baixo na Figura 2.11 e
dependendo do seu valor e demais condições como velocidade, PRAE e carga, a raiz 1 do
polinômio ( ) representado na figura pela letra “X”, pode situar-se em um dos lados do eixo
imaginário (Im) do plano complexo.
O valor da velocidade mecânica
pode fazer com que a raiz de ( ) situe-se no
semiplano direito do plano complexo a partir de um determinado valor mínimo, porém, se a
velocidade aumentar para um valor máximo, a raiz volta para o semiplano esquerdo e a
autoexcitação não ocorre.
A PRAE também apresenta limites mínimos e máximos de valores que fazem com que
a raiz do polinômio possa situar-se tanto no semiplano direito quanto no semiplano esquerdo
do plano complexo.
Figura 2.11: Parâmetros que influenciam na autoexcitação do SEIG.
A última condição de existência de autoexcitação representada na Figura 2.11 é a
condição da carga aplicada aos terminais do gerador, representada na figura em termos de
potência ativa e reativa. Embora a aplicação da carga no gerador ainda não tenha sido
analisada, esta sempre força a raiz 1 de ( ) a situar-se no semiplano esquerdo do plano
complexo. Quando uma carga é aplicada nos terminais do gerador, para que a autoexcitação
ocorra deve existir uma condição de velocidade mecânica e PRAE que possibilitem que a
parte real da raiz 1 fique situada inicialmente no semiplano direito do plano complexo, o que
garante a autoexcitação.
31
2.6 Regiões de Existência de Autoexcitação
Na seção 2.5 verificou-se que existem limites de velocidade mecânica e de PRAE que
garantem a autoexcitação desde que a indutância de magnetização inicial
não tenha valor
pequeno. Na prática, o valor de
sempre é capaz de promover a autoexcitação, pois a
indutância de magnetização inicial depende única e exclusivamente de aspectos construtivos
do gerador.
Considerando que
é capaz de promover a autoexcitação, a existência da mesma fica
associada às variações da PRAE, de
e da carga aplicada ao GI. A Figura 2.12 mostra que
as três condições citadas anteriormente delimitam regiões de existência de autoexcitação no
SEIG definidas na figura por
onde N é o número da região.
7
6
R0
5
r (pu)
R1
4
R2
3
R3
2
1
0
R4
0
0.2
0.4
0.6
0.8
1
1.2
PRAE (pu)
1.4
1.6
1.8
2
Figura 2.12: Regiões de existência da autoexcitação para diferentes cargas ativas (FP=1.0).
As curvas são fechadas à esquerda, embora não apareçam assim por questões numéricas.
Linhas tracejadas: Limites de velocidade mínima. Linhas contínuas: Limites de velocidade
máxima.
As curvas foram traçadas para diferentes valores de carga aplicadas no gerador sempre
com
= 1.0. A região , que envolve as demais, é para o caso de carga nula. A região
resulta da condição de carga nominal na máquina e a região
é para uma sobrecarga de
2.5pu. As regiões
e
resultam respectivamente das condições de 0.5pu e de 1.1pu de
carga no gerador.
Pode-se observar que existem duas velocidades mecânicas do gerador que delimitam a
existência da autoexcitação para cada condição de carga. Os limites mínimos de velocidade
são representados pelas curvas tracejadas e os limites máximos
são
representados pelas curvas contínuas.
O aumento da carga faz com que a região de existência de autoexcitação diminua, tanto
32
pela diminuição do intervalo de velocidade mecânica em que a autoexcitação ocorre, quanto
pelo aumento da PRAE necessária para que a mesma ocorra.
É possível observar na Figura 2.12 que a autoexcitação existe para valores de potência
de carga muito acima do valor nominal do próprio GI ( ). Estas regiões são apenas teóricas
e na prática não podem ser atingidas, logo, um estudo mais detalhado sobre a existência da
autoexcitação em torno das condições operativas de velocidade mecânica e potências
envolvidas deve ser realizado e é objetivo do próximo capítulo.
2.7 Conclusões
Neste capítulo foi mostrada a configuração típica de um SEIG e o modelo matemático
do mesmo foi apresentado nos eixos d e q e em pu de tal forma a facilitar a análise da
existência da autoexcitação. A análise da matriz impedância mostrou que se as condições
iniciais de magnetismo residual ou tensão inicial nos capacitores de autoexcitação forem
nulas, a autoexcitação não pode existir. Além disso, foi verificado que o estudo das raízes do
polinômio em s resultante da matriz de impedância do sistema é suficiente para predizer a
existência ou não da autoexcitação.
O método de redução da ordem da matriz impedância obtida do modelo matemático do
GI reduziu a ordem do polinômio do determinante da mesma. A análise do determinante da
matriz impedância resultante do equacionamento do GI com carga ativa e sem capacitores de
autoexcitação mostrou que as raízes situam-se sempre no semiplano esquerdo do plano
complexo, indiferente da velocidade do rotor. A variação da indutância de magnetização
mostrou que as raízes movem-se da esquerda para a direita, mas indiferente da velocidade do
rotor, estas nunca chegam ao lado direito do plano complexo. Tal fato mostra que a indutância
de magnetização inicial é fundamental no processo da autoexcitação.
A representação da carga e dos capacitores de autoexcitação em termos de potência e
em pu, permitem uma melhor visualização da existência da autoexcitação, já que unidades
mais usualmente utilizadas em sistemas elétricos foram utilizadas.
Com o auxilio de um algoritmo, a análise do determinante da matriz de impedância
resultante do modelo do GI com as respectivas cargas e PRAE, mostrou que para certas
condições de velocidade do rotor, de carga e de PRAE uma das raízes pode atingir o
semiplano direito do plano complexo, o que significa instabilidade e autoexcitação.
Foi verificado que a autoexcitação fica reestrita em regiões denominadas regiões de
existência de autoexcitação e que tais regiões dependem da velocidade do rotor, da carga e da
PRAE. As regiões de existência de autoexcitação podem existir, por exemplo, para valores de
potência de carga que do ponto de vista operativo nunca serão atingidas (elevadas
sobrecargas), portanto, a autoexcitação deve ser analisada em torno das condições operativas
do gerador de indução.
Capítulo 3
Condições de Existência de
Autoexcitação em Torno das Condições
Operativas
As regiões de existência de autoexcitação apresentadas no Capítulo 2 podem existir sob
o ponto de vista teórico para valores de potência de carga, PRAE e velocidade mecânica que
fogem das condições nominais de operação do SEIG. Neste capítulo as condições de
existência de autoexcitação são analisadas em torno das condições nominais de operação do
SEIG, denominadas de regiões operativas. Tais regiões são definidas pela velocidade
mecânica e pela carga conectada aos terminais do gerador. Objetiva-se estudar as condições
de existência de autoexcitação para condições realistas de operação do gerador, bem como
determinar valores para a PRAE que assegurem a existência de autoexcitação sobre
determinadas condições de carga e velocidade do gerador.
Primeiramente na seção 3.1.2, as condições de existência de autoexcitação são
apresentadas com o SEIG operando somente com carga ativa. Em seguida, na seção 3.1.3 é
apresentada a influência do FP da carga, tanto na autoexcitação do SEIG como na garantia de
autoexcitação em torno das regiões operativas. Na seção 3.1.4 é feita uma análise da
frequência elétrica da tensão gerada para diferentes valores de carga, FP e PRAE.
A seção 3.2 analisa a influência da variação dos parâmetros da máquina sobre a
existência de autoexcitação em torno da região operativa do gerador. São estudadas as
influências das resistências de estator e rotor e o valor da indutância de magnetização inicial.
Nesta mesma seção são apresentadas ferramentas que podem ser utilizadas para o
dimensionamento da PRAE e que auxiliam no projeto do SEIG. As conclusões do capítulo
são descritas na seção 3.3.
33
34
3.1 Definição das Condições de Existência de
Autoexcitação em Torno das Regiões Operativas do
SEIG
A análise do determinante da matriz impedância do SEIG possibilita a verificação das
condições de existência de autoexcitação e define, portanto, regiões de existência da mesma.
Como apresentado no Capítulo 2, a existência de autoexcitação fica delimitada por regiões
cujos limites dependem da velocidade mecânica do gerador, da PRAE e da carga.
Na Figura 2.12 é possível verificar que ser for fixada uma carga e uma PRAE, pode-se
encontrar uma faixa de velocidades mecânicas dentro da qual a autoexcitação ocorre. Por
outro lado, se agora a análise for feita de tal forma a fixar uma carga e uma velocidade
mecânica, é possível obter uma faixa de valores de PRAE, compreendida entre uma
e uma
, que garante a autoexcitação. Esta última situação é explorada neste capítulo
por explicitar a faixa de valores de PRAE que garante a autoexcitação para uma dada
condição de operação de interesse e, portanto, pode orientar no projeto do SEIG.
A definição de uma região operativa RO onde deve existir autoexcitação para o SEIG
está diretamente associada à potência nominal do gerador , e a velocidade nominal
do
gerador. A potência elétrica das máquinas de indução geralmente apresenta um fator de
sobrecarga denominado por FS, logo a potência máxima gerada pelo GI depende do FS, o que
na prática fica compreendido entre valores que vão de 1.0 a 1.15 vezes a potência nominal, ou
seja, se
= 1.15 a potência máxima operativa que pode ser gerada, definida por
,é
a potência nominal acrescida de 15%. Tipicamente o gerador deve operar em qualquer valor
de potência gerada até este valor máximo.
A velocidade do gerador influencia diretamente na frequência elétrica da tensão gerada
(Bodson and Kiselychnyk, 2010a), portanto, se o mesmo operar dentro de um limite de
velocidade mínima e máxima, a frequência da tensão gerada sofrerá variações em torno destas
variações de velocidade mecânica. Como o escorregamento é tipicamente pequeno, a faixa de
velocidade de operação do gerador deve ficar próxima da velocidade nominal, devendo
abranger uma faixa definida por
a
.
Assim, como a frequência da tensão gerada é uma função direta da velocidade mecânica
e como em condições normais de operação a potência da carga deve ficar limitada a
, busca-se analisar a existência de autoexcitação para todas as possíveis condições
operativas do gerador delimitadas pela RO, a qual é dada em termos da faixa de velocidade
mecânica do rotor (
a
) e da faixa de potência gerada (0 a
). A
definição da RO permite, portanto, encontrar as condições de existência da autoexcitação e de
garantia da mesma para todas as condições de operação do GI.
Neste trabalho, a faixa de velocidade mecânica operativa do gerador é considerada entre
35
uma velocidade mínima
= 0.9
e uma velocidade máxima
= 1.1 ,
o que garante que a frequência elétrica da tensão gerada sofra variações em torno destes dois
limites de velocidade. Tal faixa de velocidade é definida também pelo fato de que quando o
gerador assume carga, a velocidade da máquina primária pode sofrer variações transitórias de
velocidade abaixo de 1.0pu. Também é considerado que a potência
vale 1.1pu, de
maneira que a RO envolverá 10% de sobrecarga no gerador. A Figura 3.1, mostra os limites
de velocidade mecânica adotados e a faixa de carregamento de 0 a
= 1.1
com
= 1.0 que formam a RO considerada. Tais limites de velocidade operativa e de potência
máxima formam o retângulo de linhas pontilhadas que pode ser observado no gráfico. A linha
horizontal superior do retângulo representa a velocidade operativa máxima
, a linha
horizontal inferior representa a velocidade operativa mínima
retângulo representa o limite operativo imposto por
e a linha vertical do
.
3
r max
2.5
r (pu)
2
Região
Operativa RO
1.5
Direção 1
r min
1
r max
0.5
0
Direção 2
0
0.2
0.4
0.6
0.8
1
1.2
Potência da Carga (pu)
r min
1.4
1.6
1.8
Figura 3.1: Definição da RO e seu envolvimento por regiões de existência de autoexcitação.
Linhas pontilhadas - RO: Horizontal superior , horizontal inferior ,
vertical . Linhas tracejadas - Região de existência de autoexcitação produzida por
uma
. Linhas contínuas - Região de existência de autoexcitação produzida por uma
.
3.1.1 Existência de Autoexcitação em Torno da RO para Cargas Ativas
A Figura 3.1 também mostra as regiões de existência de autoexcitação conjuntamente
com a RO do gerador. A curva tracejada delimita a região de velocidade e potência de carga
em que ocorre autoexcitação para uma
, sendo a parte superior da curva associada
ao limite da velocidade máxima
e a parte inferior ao limite de velocidade mínima
. A curva contínua faz o mesmo para uma
. Logo, se a PRAE aumentar
demasiadamente, a velocidade máxima
representada pela curva linha contínua
36
superior desce no sentido da “Direção 2” indicada na Figura 3.1. Se a
diminuir, a
curva de linha tracejada inferior da velocidade mínima
sobe no sentido da “Direção 1”
indicada na Figura 3.1. Em ambos os casos as regiões de existência de autoexcitação
produzidas pelas duas PRAEs afastam-se da região operativa RO. A Figura 3.2 mostra o que
ocorre com a diminuição da
e o aumento da
. Nota-se que a
autoexcitação não pode ocorrer para nenhuma condição de carga dentro da RO, além disso,
para a
a partir de aproximadamente 1.0pu de potência ativa de carga, a
autoexcitação não existe para nenhuma velocidade mecânica do gerador.
3
2.5
r (pu)
2
1.5
1
RO
0.5
0
0
0.2
0.4
0.6
0.8
Potência da Carga (pu)
1
1.2
Figura 3.2: Regiões de existência de autoexcitação produzidas por uma
(linhas
tracejadas) e uma
(linhas contínuas) que não propiciam a autoexcitação frente a
RO.
Para que a RO seja envolvida tanto pela curva tracejada inferior quanto pela curva
contínua superior, a
deve aumentar e a
deve diminuir. A Figura 3.3
mostra esta condição. Nesta figura, com a diminuição da
, o limite superior de
velocidade
para que ocorra a autoexcitação produzida pela
ultrapassa o
limite da velocidade operativa
, garantindo autoexcitação para toda a RO.
Entretanto, essa PRAE é muito elevada (cerca de 10pu para o GI em estudo) para ser utilizada
na prática. Por outro lado, se a
aumentar para 0.614pu (para o GI em estudo), o
retângulo que define a RO fica acima da curva tracejada inferior que indica o limite da
velocidade
onde ocorre a autoexcitação, desta forma a RO fica novamente envolvida
por uma condição de
capaz de propiciar a autoexcitação em torno das condições
operativas do gerador de indução.
Pode-se observar que o limite inferior de velocidade
para que a autoexcitação
ocorra é o que determina a inclusão ou não da RO na região de existência de autoexcitação
quando a PRAE está próxima do valor nominal de potência do gerador. Isso mostra que a
, dimensionada para a velocidade de autoexcitação mínima
, é capaz de
37
propiciar a autoexcitação para todas as condições operativas de velocidade mecânica e
carregamento do gerador. A
está muito acima da potência nominal do gerador, o
que torna sua aplicação economicamente inviável e pode, portanto, ser desprezada das
análises em torno dos limites operativos de velocidade mecânica e carregamento da máquina
que delimitam a RO. Como resultado, do ponto de vista prático um valor de
e de
velocidade
são suficientes para assegurar uma região de existência de autoexcitação
que envolve toda a RO.
3
2.5
r (pu)
2
1.5
RO
1
r min
0.5
0
0
0.2
0.4
0.6
0.8
1
1.2
Potência da Carga (pu)
1.4
1.6
1.8
Figura 3.3: Regiões de existência de autoexcitação em torno da RO. Curvas tracejadas . Curvas contínuas .
A Figura 3.4 mostra os valores da velocidade em função da
em torno da RO.
PRp =1.1pu
P Rp =0.0pu
1.1
r (pu)
1.05
1
0.95
0.9
X: 0.614
Y: 0.9
0.85
0.25
0.3
0.35
0.4
0.45
PRAE (pu)
0.5
0.55
0.6
0.65
Figura 3.4: Existência da autoexcitação em torno da RO para cargas com
= 1.0.
38
Cada curva corresponde aos diferentes valores de carga ativa, partindo da carga 0.0pu até o
limite de potência
= 1.1 , da esquerda para a direita, com um acréscimo de 0.1pu.
Com o auxílio das curvas do gráfico da Figura 3.4, os valores de
podem ser
facilmente encontrados para valores de velocidade mecânica do gerador compreendida entre
e
. Para o gerador em estudo, o maior valor de
(0.614 pu)
ocorre para carga ativa máxima de 1.1pu e velocidade mecânica mínima de 0.9pu. Portanto,
do gráfico da Figura 3.4 pode-se concluir que com uma
= 0.614 a autoexcitação
é garantida para toda a faixa de carregamento de potência ativa do gerador desde a velocidade
operativa mínima de 0.9pu a uma velocidade máxima de 1.1pu.
3.1.2 Influência do FP na Existência de Autoexcitação em Torno da RO
Em condições normais de operação, é necessário que o SEIG forneça potência para
diferentes valores de carga e FP, portanto, a análise da influência do FP na autoexcitação em
torno da RO deve ser analisada.
A Figura 3.5 mostra a influência que o FP da carga insere no deslocamento da região de
existência de autoexcitação em torno da RO para o SEIG em estudo. Ambas as curvas foram
traçadas para uma
e para a mesma potência de carga, porém para dois valores
distintos de FP. A curva de linha tracejada leva em consideração a carga máxima
=
1.1 com
= 1.0 e a curva linha contínua considera
= 1.1 com
= 0.9.
2.5
r (pu)
2
1.5
A
1
B
RO
C
D
0.5
0
0
0.2
0.4
0.6
0.8
1
1.2
Potência da Carga (pu)
1.4
1.6
Figura 3.5: Variação da região de existência de autoexcitação frente a cargas indutivas. Linha
tracejada - Região de existência de autoexcitação para
e
= 1.0. Linhas
contínuas - Região de existência de autoexcitação para
e
= 0.9.
É possível observar que a redução do FP da carga modifica substancialmente os valores
39
da velocidade mínima
e velocidade
onde é garantida a existência da
autoexcitação. Para o caso de
= 1.0, a RO é completamente envolvida pela região de
existência de autoexcitação, porém, quando o FP diminui, a área ABCD da RO deixa de ser
envolvida pela região de existência de autoexcitação. Portanto, frente a cargas indutivas, a
deve ser maior para possibilitar que toda a RO seja novamente envolvida pela
região de existência de autoexcitação e por consequência
envolva os limites operativos
de velocidade mecânica.
A Figura 3.6 mostra que à medida que o fator de potência diminui, maior deve ser o
valor da PRAE conectada ao SEIG a fim de propiciar a autoexcitação em torno da RO.
1.6
r opr min
PRAE (pu)
1.4
1.2
r opr max
1
0.8
0.6
0.4
0
0.2
0.4
0.6
0.8
1
FP
Figura 3.6: Valores mínimos de PRAE para diferentes FP e
= 1.1 . Linha
pontilhada - Variação da PRAE para diferentes FP e
. Linha contínua - Variação
da PRAE para diferentes FP e
.
A curva contínua superior mostra os valores mínimos de autoexcitação para a faixa de
FP entre 0 a 1.0 e para uma potência operativa máxima de 1.1pu considerando a velocidade
operativa mínima
. A curva tracejada mostra o mesmo caso, mas com velocidade de
operação máxima
.
Pode-se observar que se o SEIG operar com
a autoexcitação também
existirá, logo, a autoexcitação existe para toda a RO se a
propiciar a autoexcitação
para a maior potência de carga com o menor FP e para a menor velocidade operativa dada por
= 0.9 .
40
3.1.3 Análise da Frequência Elétrica da Tensão Gerada em Torno da RO
Na seção 3.1.2 verificou-se que a autoexcitação existe para toda a RO se uma
propiciar a autoexcitação com uma
= 0.9 , porém, sob o ponto de vista operativo
do gerador é necessário saber como se comporta a frequência elétrica da tensão gerada.
Condições analíticas desenvolvidas por Bodson and Kiselychnyk (2010a) mostram os valores
de frequência mínima e máxima da tensão de saída que estão diretamente associadas às
velocidades
e
. O objetivo desta seção é analisar o comportamento da
frequência elétrica da tensão gerada para cargas ativas e com
< 1.0 em torno da RO.
Segundo Chan and Lai (2001), Tandon et al. (1984), Grantham and Mismail (1989) e
Bodson and Kiselychnyk (2010a), a frequência elétrica da tensão gerada pode ser obtida
através do polinômio do determinante da matriz impedância do sistema. O polinômio em s da
equação (2.45) pode ser escrito na forma fatorada
( ) = [ +(
±
)]. [ + (
±
)]. [ + (
±
)]. [ + (
±
)] = 0.
(3.1)
Seyoum (2003) menciona que o processo de autoexcitação pode ser compreendido de
uma forma simplificada através da análise de um circuito RLC série com uma tensão inicial
no capacitor. Para este exemplo, a resposta temporal da corrente no circuito é da forma
( )=
cos (
), onde representa a parte real da raiz do polinômio característico do
circuito RLC série,
é a frequência elétrica dada pela parte imaginaria desta raiz e
éa
amplitude da corrente. Para o caso do circuito RLC série, o valor de será sempre positivo e
a exponencial será amortecida fazendo com que (∞) = 0 .
No caso do gerador de indução a análise é semelhante. Se por exemplo,
da equação
(3.1) for positivo, a tensão de saída do gerador escrita na forma ( ) =
cos (
),
onde
é a amplitude da tensão inicial (proveniente do magnetismo residual do rotor ou da
tensão inicial dos capacitores de autoexcitação), tende a crescer no decorrer do tempo o que
ocasiona a autoexcitação. A frequência da tensão gerada é , ou seja, o termo imaginário da
raiz que apresenta parte real positiva. A tensão V(t) estabiliza-se quando a indutância de
magnetização satura (isso será mais bem apresentado no Capítulo 4) fazendo com que
torne-se nulo. Nesta condição o gerador passa a operar em um ciclo limite e a parte imaginária
da raiz que possui parte real positiva é uma aproximação da frequência elétrica da tensão
gerada (Bodson and Kiselychnyk, 2010a).
A Figura 3.7 mostra o valor aproximado da frequência elétrica para valores de potência
ativa compreendidos entre 0 a 1.1pu e em função da PRAE, sempre com
= 0.9 .
Cada curva deste gráfico representa uma potência, iniciando na potência
= 0.0
(curva superior) até a potência
= 1.1
(curva inferior). O início de cada curva
representa o valor mínimo da PRAE necessária para promover a autoexcitação na respectiva
41
condição de carga da curva.
A Figura 3.7 mostra também que o aumento da carga ativa no gerador reduz a
frequência elétrica, o que mostra a regulação insatisfatória da frequência elétrica mesmo com
uma velocidade operativa constante. Pode-se observar que mesmo se a PRAE for a mínima
necessária para promover a autoexcitação com carga nula, a frequência elétrica da tensão
gerada fica abaixo da velocidade mecânica
= 0.9 , ou seja, o escorregamento
para o caso do gerador de indução será sempre negativo.
O aumento da PRAE também reduz o valor da frequência elétrica para qualquer valor
de carga ativa e isso se deve ao fato da mesma impor carga ao sistema. Esta variação pode ser
observada para a curva de
= 0.0 , logo se a PRAE aumentar, a frequência elétrica
diminui de um valor Δ
indicada pela cota da linha vertical vermelha.
0.905
PRAE min
P opr min =0.0pu
Frequência Elétrica e (pu)
0.9
e
0.895
0.89
0.885
0.88
0.875
P opr max =1.1pu
0.87
0.2
0.4
0.6
0.8
1
1.2
PRAE (pu)
1.4
1.6
1.8
2
Figura 3.7: Variação da frequência elétrica em função da PRAE e da carga com
considerando
= 0.9 .
= 1.0
O gráfico da Figura 3.8 é o mesmo gráfico apresentado na Figura 3.7, porém para este
caso a velocidade mecânica é
= 1.1 . Neste gráfico é possível observar o
aumento da frequência elétrica em função do aumento da velocidade mecânica para todas as
condições de carga ativa do gerador.
A variação da frequência elétrica que ocorre para cada PRAE com a variação da carga
zero até o valor máximo
= 1.1 pode ser definida por
Δ
=
−
.
(3.2)
Tal variação é mostrada na Figura 3.8 com o auxílio das cotas verticais na cor vermelha. É
42
possível observar para este caso, que o aumento da PRAE diminui Δ
frequência elétrica para variações menores e mais próximas a 1.0pu.
1.1
e aproxima a
ei
1.09
Frequência Elétrica e (pu)
1.08
1.07
ef
1.06
1.05
ei
1.04
1.03
1.02
ef
1.01
1
0.5
1
1.5
2
PRAE (pu)
2.5
3
3.5
Figura 3.8: Variação da frequência elétrica em função da PRAE e da carga com
considerando
= 1.1 .
= 1.0
Os gráficos das Figuras 3.7 e 3.8 consideram apenas cargas resistivas acopladas aos
terminais do gerador. A Figura 3.9 mostra o que ocorre com a frequência elétrica da tensão
gerada quando a carga apresenta
= 0.3. Novamente cada curva representa uma potência
de carga no gerador variando de 0pu a 1.1pu sempre com o mesmo fator de potência e com
= 0.9 .
0.905
0.9
ei
P0
Frequência Elétrica e (pu)
0.895
ef
0.89
ei
0.885
0.88
ef
0.875
0.87
0.865
0
0.5
1
1.5
2
PRAE (pu)
2.5
3
3.5
Figura 3.9: Variação da frequência elétrica em função da PRAE para diferentes valores de
carga com
= 0.3 considerando
= 0.9 .
43
Percebe-se que o FP da carga altera o comportamento que a PRAE exerce sobre a
frequência elétrica. Nas condições em que
< 1.0, existe um ponto
cuja PRAE deste
ponto propicia o menor Δ , porém tal ponto varia de posição. Se FP aproximar-se de zero, o
ponto avança no sentido anti-horário indicado pela seta na figura e se FP aproximar-se de 1
o ponto
avança no sentido horário. É possível observar ainda que para este caso (
=
0.3) a
que propicia a autoexcitação para todas as condições de carga é a que produz
a menor variação de Δ . Variações menores de frequência elétrica podem ser obtidas
também em torno de , porém, a PRAE necessária para tais condições é maior que a
.
A Figura 3.10 mostra o mesmo gráfico da Figura 3.9, mas agora com
= 0.7. É
possível observar nesta figura o deslocamento do ponto
quando o FP tende a 1.0. Neste
caso, menores variações de Δ podem ser obtidas se a PRAE aumentar consideravelmente
de valor, o que do ponto de vista econômico não é atrativo
0.905
0.9
ei
Frequência Elétrica e (pu)
0.895
0.89
0.885
ef
0.88
0.875
P0
0.87
0.865
0.86
0
0.5
1
1.5
2
PRAE (pu)
2.5
3
3.5
4
Figura 3.10: Variação da frequência elétrica em função da PRAE para diferentes valores de
carga com
= 0.7 considerando
= 0.9 .
Outro fator importante a ser analisado é que o valor da frequência elétrica está bem
abaixo de 1.0 pu. Se a velocidade mecânica aumentar, o ponto
apresentado na Figura 3.10
tende a movimentar-se para cima e para a esquerda como mostra a Figura 3.11.
O aumento da velocidade mecânica promove novamente a diminuição de Δ
e os
valores de frequência elétrica variam em torno de 1.0pu. Isso mostra que o gerador deve
operar com uma velocidade mecânica acima de 1.0pu, porém não superior a 1.1pu, pois neste
caso a frequência elétrica da tensão gerada é muito superior à frequência que a cargas ligadas
ao SEIG operam.
Da análise da frequência elétrica é possível observar que existe uma PRAE ideal capaz
de propiciar a menor variação de frequência elétrica para toda a faixa de carregamento da
44
carga e para diferentes FP. Associada a esta PRAE, existe uma velocidade mecânica que faz
com que a frequência elétrica da tensão gerada situe-se em torno de 1.0pu. Estas duas
condições originam um ponto de operação ideal.
1.06
1.05
ei
Frequência Elétrica e (pu)
1.04
1.03
ef
1.02
P0
1.01
1
0.99
0.98
0.97
0
0.5
1
1.5
2
PRAE (pu)
2.5
3
3.5
4
Figura 3.11: Variação da frequência elétrica em função da PRAE para diferentes valores de
carga com
= 0.7 considerando
= 1.05 .
Para o gerador em estudo, um ponto ideal de operação é obtido com a velocidade
mecânica
= 1.05
e com a
(1.74pu) resultante da velocidade
=
0.9
e da máxima potência de carga com o menor FP.
É possível observar que o valor de velocidade
= 1.05
encontra-se dentro da RO,
que por sua vez envolve também as condições operativas de frequência elétrica. Para o ponto
de operação mencionado anteriormente (
= 1.74 ,
= 1.05 ), para qualquer
condição de carga e FP a variação da frequência elétrica não ultrapassa 3%.
3.2 Garantia de Autoexcitação em Torno da RO e
Procedimentos de Projeto
Nas seções 3.1.2 e 3.1.3 foram analisadas as condições de existência de autoexcitação
do SEIG em torno da RO. Nesta seção busca-se desenvolver procedimentos de projeto do
SEIG, o que implica na necessidade da determinação da PRAE que garanta a autoexcitação
para toda a RO.
O algoritmo resultante do fluxograma apresentado na seção 2.5 pode ser utilizado para
gerar superfícies de existência de autoexcitação. A Figura 3.12 mostra superfícies geradas
45
= 0.0
variando-se a potência da carga de
de
=0a
= 1.1
a
e fator de potência
= 1.0.
Cada superfície desta figura representa um valor de velocidade mecânica do rotor e o
eixo “Z” representa os valores de
necessária para que a autoexcitação ocorra para
as diferentes condições de carga e FP.
A seta na figura indica o sentido do aumento do valor de velocidade operativa de 0.9pu
a 1.1pu, logo a superfície superior definida por
representa a velocidade de 0.9pu, a
superfície intermediária definida por representa a velocidade de 1.0pu e a superfície inferior
definida por
representa a velocidade de 1.1pu.
2
X: 1.1
Y: 0
Z: 1.74
PRAE (pu)
1.5
1
0.5
0
0
1
X: 1.1
Y: 0
Z: 1.16
0.2
0.8
0.6
0.4
0.4
0.6
0.2
0.8
1
1.2
0
FP
Potência da Carga (pu)
Figura 3.12: Superfícies de existência de autoexcitação em torno das condições operativas de
carga, FP e velocidade do rotor.
2
PRAE (pu)
1.5
1
0.5
0
0
1
0.8
0.6
0.2
0.4
0.4
0.6
0.8
0.2
1
1.2
0
FP
Potência da Carga (pu)
Figura 3.13: Superfície superior
de existência de autoexcitação em torno da RO.
46
Ainda da Figura 3.12, é possível observar que a superfície , obtida a partida da menor
velocidade mecânica operativa (
= 0.9 ), situa-se acima das demais superfícies, o
que garante que se a PRAE for dimensionada a partir desta superfície, a autoexcitação é
garantida para velocidades operativas maiores. A superfície
é apresentada novamente na
Figura 3.13.
A Figura 3.13 mostra também que a diminuição do FP da carga faz com que a PRAE
deva ser maior a fim de garantir a existência de autoexcitação e para valores de FP
compreendidos entre 0.6 e 1.0 ocorrem as maiores variações de PRAE.
3.2.1 Procedimentos de Projeto
Embora a Figura 3.13 forneça uma visão geral do valor da
a ser adotada em
função da carga e do fator de potência, a superfície é resultado de uma única velocidade
operativa. Sob o ponto de vista de projeto, o SEIG deve fornecer potência desde a
=
0.0
a
= 1.1
e para qualquer valor de FP. Se a carga operativa for fixada em seu
valor máximo
= 1.1 , é possível criar uma superfície de projeto
que é função
do FP e da velocidade mecânica. Tal superfície proposta neste trabalho possibilita o
dimensionamento da
para que exista autoexcitação em qualquer condição de
potência que se encontre dentro da RO. A Figura 3.14 mostra a superfície .
X: 0.9
Y: 0
Z: 1.74
2
PRAE (pu)
1.5
1
0.5
0
0
0.2
1.1
0.4
X: 0.9
Y: 1
Z: 0.62
1.05
1
0.95
0.9
0.85
0.6
0.8
1
FP
r (pu)
Figura 3.14: Superfície
de projeto da PRAE para carga de 1.1pu.
A Figura 3.15 mostra as curvas de nível para a superfície
e que contém os limites de
velocidade impostas pela RO (
= 0.9
a
= 1.1
curvas de nível da superfície de projeto é possível especificar a
). Com o auxílio das
em função da
47
velocidade e do FP da carga. Se por exemplo, for considerada que
= 0.9
e que o FP
mínimo da carga conectada ao gerador chega a 0.5, o ponto de encontro entre as duas retas
que delimitam tal limite de operação para o SEIG, resulta no ponto “A” da Figura 3.15. Se o
valor da
dimensionada ficar compreendida entre aproximadamente 1.64 <
< 1.70 , para qualquer carga compreendida entre
= 0.0
a
= 1.1
com FP variando de 0.5 a 1.0 a autoexcitação é garantida.
Para o mesmo caso mencionado anteriormente, mas agora considerando
= 1.0, a
deve ficar entre os valores das curvas de nível compreendidas entre
aproximadamente 0.57 <
< 0.64
(ponto B da Figura 3.15). O valor exato da
pode ser verificado na superfície
da Figura 3.14 e vale
= 0.62 .
B
1
0.63865
0.572 23
0.9
r opr max
r opr min
0.8
0.7
0
1. 7
0.6
FP
14
A
0.5
0.4
0.3
0.1
0
0.8
0.85
0.9
1.369 3
1.635
0.2
0.95
1
1.05
1.1
1.15
1.2
r (pu)
Figura 3.15: Curvas de nível para dimensionar a
trabalho (carga de 1.1pu).
para o SEIG considerado neste
A análise da frequência elétrica apresentada na seção 3.1.3, mostra que a frequência
elétrica da tensão gerada somente estará próxima a 1.0pu quando a velocidade do rotor estiver
acima de 1.0pu. Portanto, a princípio se a velocidade operativa
ficar sempre acima de
1.0pu, as curvas de nível da Figura 3.15 mostram que para este caso uma
= 1.37
garante a autoexcitação para
=0 a
= 1.0. Tal fato é tentador do ponto de vista de
projeto uma vez que a redução da PRAE impacta diretamente nos custos envolvidos do SEIG,
mas levar em consideração esta análise pode resultar em inexistência de autoexcitação durante
a aplicação da carga no gerador, pois como o gerador opera de forma isolada, a variação da
velocidade da máquina primária MP para valores abaixo de 1.0pu pode ocorrer por alguns
segundos devido à regulação da MP e isso pode propiciar a perda da autoexcitação. Este fato
será mais bem analisado no Capítulo 4.
As análises desenvolvidas anteriormente e propostas neste trabalho, mostram que a
e
suas curvas de nível podem ser utilizadas com bastante precisão no projeto do SEIG. Para a
48
obtenção da
é necessário conhecer os parâmetros do GI em estudo e aplicar o algoritmo do
fluxograma apresentado no Capítulo 2.
Quando o SEIG encontra-se em operação, os parâmetros do GI tais como as resistências
de estator e rotor alteram-se devido ao aumento da temperatura. A seção 3.2.2 mostra o que
ocorre com a
devido às variações de tais parâmetros.
3.2.2 Efeito da Variação das Resistências de Estator e Rotor nas
Superfícies de Projeto
As resistências de estator e rotor aumentam ou diminuem em função da temperatura da
máquina de indução (Chapman, 2005; Seyoum, 2003). O valor da resistência de estator ou
rotor pode ser corrigido através da equação
=
.
(3.3)
apresentada na NBR 5383-1-2002. Nesta equação,
é a resistência corrigida,
resistência inicial a ser corrigida e o termo ′ é o resultado do quociente obtido de
=(
onde
e
corrigida e
+
)/(
+
éa
),
(3.4)
são respectivamente as temperaturas inicial e final para a resistência a ser
= 234.5 (constante para o cobre eletrolítico com 100% de condutividade).
Para máquinas de indução de classe F, por exemplo, a temperatura máxima pode chegar
a 155 C em condições de sobrecarga. Considerando uma temperatura inicial = 25° e uma
temperatura
= 155° , o fator multiplicativo
vale 1.501. Logo para uma condição
máxima de temperatura, tanto a resistência de rotor quanto a resistência de estator podem
aumentar cerca de 50%. A Figura 3.16 mostra as duas superfícies
formadas a partir dos
dois valores de temperatura mencionados anteriormente.
É possível observar na Figura 3.16 que quando a temperatura aumenta, a superfície de
projeto tende a subir no sentido do eixo “Z”, aumentando os valores de
para todas
as condições de operação do gerador. A figura mostra que existe uma diferença de 0.03pu
entre as PRAEs obtidas das superfícies (para
= 0.9 e
= 1.0). Embora tal variação
seja significativa sob o ponto de vista da PRAE, em condições nominais o gerador opera com
uma temperatura de 80° e para este caso as superfícies
obtidas a partir da temperatura de
25° e 80° são praticamente iguais, não comprometendo as curvas de nível de
obtidas a
49
partir de uma temperatura à 25° . Isso mostra que as variações de resistência de estator e
rotor devido ao aumento da temperatura não influenciam na autoexcitação do SEIG em torno
da RO.
o
Sp a 155 C
2
PRAE (pu)
1.5
1
0.5
0
1.15
Sp a 25oC
0
0.2
1.1
1.05
1
X: 0.9
Y: 1
0.95 Z: 0.62
0.9
r (pu)
0.4
X: 0.9
Y: 1
Z: 0.65
0.85
0.6
0.8
FP
1
Figura 3.16: Superfícies de projeto para diferentes valores de temperatura de operação do GI.
3.2.3 Influência da Variação de
nas Superfícies de Projeto
Na seção 2.2 do Capítulo 2, a Figura 2.3 mostra a influência que a variação da
indutância de magnetização causa na localização das raízes do polinômio P(s) da equação
(2.22). Na seção 2.5, a Figura 2.8 mostra que quando a indutância de magnetização
apresenta um valor muito pequeno, qualquer valor de
ou de PRAE inserido no SEIG é
incapaz de fazer com que a parte real da raiz 1 de P(s) atinja o lado direito do plano
complexo, o que deixa o equilíbrio = 0 instável e propicia a autoexcitação.
A Figura 3.17 mostra para o gerador em estudo, o que ocorre com a superfície se o
valor de
fosse maior ou menor. O aumento de 0.2pu (0.04H) em
dá origem à
superfície
e a diminuição de 0.2pu em
origina a superfície
.
Pode-se observar que ao contrário das variações das resistências de estator e rotor
analisadas na seção 3.2.2, a variação de
altera significativamente o valor da PRAE
necessária para que ocorra a condição de existência de autoexcitação no gerador de indução.
Logo, quanto maior
menor será a PRAE necessária para propiciar a autoexcitação em
todas as condições operativas do gerador.
Neste ponto é importante enfatizar que embora a indutância de magnetização dependa
do fluxo magnético do entreferro da máquina e da corrente de magnetização sob o ponto de
vista dinâmico, o que será verificado no próximo capítulo, o seu valor inicial
é um
parâmetro que depende dos aspectos construtivos do gerador, logo o valor da PRAE, de
,
50
da carga e do seu FP, definem se o estado = 0 é ou não instável e por consequência se existe
ou não a condição de existência de autoexcitação.
SLm 2
PRAE (pu)
1.5
Sp
1
SLm +
X: 0.9
Y: 1
Z: 0.75
0.5
0
0
1.15
0.2
1.1
1.05
1
0.95
0.4
X: 0.9
Y: 1
Z: 0.54
0.9
0.85
0.6
0.8
1
FP
r (pu)
Figura 3.17: Variação da
em função do aumento ou da diminuição de
.
3.3 Conclusões
Neste capítulo a definição de uma região operativa definida pelos limites mínimos e
máximos de velocidade mecânica e pela potência máxima da carga conectada ao gerador,
propiciou a análise da autoexcitação em torno das condições que um SEIG opera do ponto de
vista prático. A definição da região operativa possibilita que a análise da autoexcitação do
SEIG seja realizada de forma mais prática e em torno das condições de operação do gerador,
permitindo que uma PRAE seja mais facilmente obtida. Desta análise é possível verificar que
se a PRAE for dimensionada para a menor velocidade operativa e para a maior carga com o
menor FP, tal PRAE propicia a autoexcitação para todas as demais condições de carga, FP e
velocidade mecânica contidas na região operativa do gerador.
A PRAE calculada para esta condição faz também com que o valor da frequência
elétrica da tensão gerada situe-se dentro da região operativa e se o gerador operar com uma
velocidade acima de 1.0pu e abaixo de 1.1pu, a frequência elétrica da tensão gerada fica
próxima a 1.0pu com variações menores que 3% para qualquer condição de carga e FP.
As variações das resistências de estator e rotor devido às variações de temperatura, não
influenciam nas condições de existência da autoexcitação em torno da região operativa e,
portanto, tais variações de resistência não precisam ser levadas em consideração no projeto do
SEIG.
Ao contrário das variações de resistência mencionadas anteriormente, o valor de
é
51
o parâmetro que mais influencia no dimensionamento da PRAE, logo seu valor é fundamental
para a definição de uma PRAE que propicie a autoexcitação em toda região operativa e para
todas as condições de carga e FP. Como cada máquina apresenta um determinado valor de
, pois este depende dos aspectos construtivos, é possível verificar que para duas máquinas
de mesma potência, a que apresenta um
maior necessita de menos PRAE para promover
sua autoexcitação.
A condição de existência da autoexcitação em torno da região operativa pode ser
apresentada também em gráficos na forma de superfícies e cujas alturas retornam diretamente
o valor da PRAE necessária para se obter autoexcitação com determinada condição de carga e
FP. Tais superfícies podem gerar curvas de nível que possibilitam o dimensionamento da
PRAE necessária para promover a autoexcitação para todas as condições dentro da região
operativa.
Os conceitos propostos neste capítulo auxiliam na definição de uma PRAE que garanta
autoexcitação em torno da região operativa do gerador de indução para qualquer carga e FP e
tais conceitos auxiliam, portanto, no dimensionamento do SEIG.
52
Capítulo 4
Dinâmica do Processo de Autoexcitação
do SEIG
O modelo matemático do SEIG mostrado no Capítulo 2 foi apresentado de tal forma a
permitir a visualização do que ocorre com as raízes do polinômio característico da matriz
impedância do sistema e permitir, portanto, que as regiões de existência de autoexcitação
fossem visualizadas. No Capítulo 3, a definição de uma região operativa em torno das
condições nominais de operação do GI, permitiu que fossem obtidas superfícies e curvas de
nível que auxiliam no dimensionamento do SEIG. Neste capítulo é apresentado o modelo
dinâmico do SEIG, cujas simulações são realizadas de modo a verificar se a PRAE obtida dos
procedimentos de projeto apresentados no Capítulo 3, de fato propiciam a autoexcitação.
Na seção 4.1 é apresentado o modelo do SEIG usualmente utilizado para simulações
dinâmicas. Em seguida, na seção 4.2, a dinâmica da indutância de magnetização é inserida no
modelo, o que o torna mais completo sob o ponto de vista real. Na seção 4.3 são realizadas
simulações que permitem validar os procedimentos de projeto apresentados no Capítulo 3,
verificar as diferentes formas de disparo da autoexcitação e o efeito que a curva de saturação
provoca na mesma. Além disso, nesta seção também é apresentada a condição de manutenção
da autoexcitação e uma análise da frequência elétrica da tensão gerada. Finalmente a seção
4.4 apresenta as conclusões do capítulo.
4.1 Modelo Matemático do SEIG para Simulações
Dinâmicas
Para simulações dinâmicas, é interessante escrever o modelo do gerador na forma de
variáveis de estado. De uma forma geral, o modelo do gerador de indução pode ser
apresentado por diferentes variáveis de estado, como por exemplo, corrente de eixo direto e
quadratura, corrente de magnetização e fluxo ou somente fluxo (Levi, 1995). Neste capítulo,
o modelo será reapresentado com correntes de eixo direto e quadratura como variáveis de
estado e todas as considerações sobre o modelo já mencionadas no Capítulo 2 continuam
53
54
sendo válidas.
O modelo dinâmico do gerador de indução tendo os fluxos magnéticos como variáveis
de estado foi apresentado no Capítulo 2 nas equações (2.2) a (2.5). Após algumas
manipulações, estas equações foram reescritas na forma matricial apresentada na equação
(2.12), onde as correntes aparecem como variáveis de estado. Embora as equações
mencionadas anteriormente representem o modelo do gerador de indução, algumas
adequações nestas equações devem ser realizadas a fim de permitir a simulação do processo
de autoexcitação do SEIG.
Por questões de comodidade, as equações dos fluxos magnéticos e do modelo do
gerador apresentado no Capítulo 2 são novamente apresentadas nas equações (4.1) e (4.2) a
(4.5), porém agora expresso com todas as variáveis e parâmetros em pu (por unidade) com
tensão, potência e frequência base dadas por ,
e
respectivamente.
=
=
⎧
=
=
⎨
⎩
+
+
−
−
−
−
+
+
+
+
−
+
+
+
−
(
=0
+
− −
+
+
+
̇
+
1
)=0
̇
+
+
+
(4.1)
+
+
1
+
+
+
(4.2)
=0
(
1
+
(
+
)=0
)=0
(4.3)
̇
−
−
+
+
+
+
1
=0
(
+
−
+
)=0
̇
−
+
=0
(4.4)
55
−
−
+
−
+
+
−
+
−
1
+
−
1
+
(
+
(
)=0
+
)=0
(4.5)
Considerando que as tensões de rotor são nulas e que os termos
e
tratam-se das tensões residuais definidas no Capítulo 2, o modelo pode ser escrito na forma
matricial
−
+
̇=0
+
(4.6)
onde
⎡
=⎢
⎢−
⎣
0
⎤
⎥,
⎥
⎦
0
0
0
0
=
−
0
0
,
0
0
=
1
⎡
= ⎢
⎢
⎣
⎤
⎥,
⎥
⎦
̇
⎡ ̇ ⎤
̇ = ⎢ ⎥
⎢ ̇ ⎥
⎣ ̇ ⎦
0
0
0
0
0
0
.
0
Isolando o vetor ̇ da equação (4.6), esta pode ser reescrita na forma
̇=−
(
)+
.
(4.7)
A inversa da matriz B resulta em
1
−
0
0
onde
=
−
0
−
0
0
0
−
0
0
−
.
Desenvolvendo a equação 4.7, o modelo do gerador de indução resulta nas equações de
estado (4.8) a (4.11).
56
1
̇ ̇ =
1
̇ ̇ =
̇ ̇ =
̇ ̇ =
1
1
(
−
(
+
(−
+
(−
−
−
+
−
+
−
+
−
+
−
+
)
(4.8)
+
+
)
(4.9)
+
−
)
(4.10)
−
−
)
(4.11)
As equações (4.8) a (4.11) juntamente com as equações que envolvem a carga e a PRAE
(ainda não apresentadas), completam o modelo dinâmico do gerador de indução. Se neste
modelo a indutância de magnetização for considerada constante, o processo de autoexcitação
nunca chega a estabilizar-se em torno de um ponto de equilíbrio. A Figura 4.1 mostra o
resultado da simulação para o caso onde a indutância de magnetização é considerada
constante e, portanto, a amplitude da tensão gerada aumenta indefinidamente ao longo do
tempo.
4
Tensão Vds
Tensão de eixo direto Vds (pu)
3
Valor RMS
2
1
0
-1
-2
-3
-4
0
0.5
1
1.5
t(s)
2
Figura 4.1: Autoexcitação do SEIG com
2.5
3
constante.
No Capítulo 3 foi verificado que a indutância de magnetização
e as demais
condições de velocidade, carga e FP e PRAE, definem a condição de existência de
autoexcitação. Como mencionado naquele capítulo,
depende dos parâmetros construtivos
da máquina, mas do ponto de vista dinâmico o valor da indutância de magnetização varia em
função da corrente de magnetização e do fluxo magnético. Logo, a indutância de
57
magnetização deve ser encarada como uma função da corrente de magnetização no modelo
dinâmico do SEIG.
Como pode ser observado na Figura 2.2, as correntes
e
que representam as
correntes de magnetização de eixo direto e em quadratura, circulam pela indutância de
magnetização
. Tais correntes são obtidas através da soma vetorial das correntes de eixo
direto e quadratura de estator e rotor na forma
=
+
=
+
(4.12)
.
(4.13)
A corrente de magnetização é então obtida como
=
+
(4.14)
.
A Figura 4.2 mostra a curva da indutância de magnetização em função da corrente de
magnetização obtida experimentalmente para o SEIG em estudo neste trabalho. Esta curva foi
obtida através do ensaio do gerador de indução a vazio e à velocidade síncrona. Maiores
detalhes sobre o ensaio e sobre a metodologia utilizada para a realização do mesmo são
apresentados no Apêndice A.
0.22
Dados Experimentais
Polinômio 4a Ordem
Dados Experimentais
0.2
Polinômio 3a Ordem
0.18
Extrapolação Pol. 4a Ordem
Lm(H)
0.16
0.14
0.12
0.1
0.08
0
2
4
6
8
10
Corrente de Magnetização im(A)
12
14
Figura 4.2: Comportamento não linear da indutância de magnetização em função da corrente
de magnetização para o gerador em estudo neste trabalho.
58
A representação de
( ) pode ser obtida por uma aproximação polinomial dos dados
experimentais levantados. A aproximação desta função por polinômios é bastante utilizada na
literatura e pode ser verificada em Bodson and Kiselychnyk (2012) e Idjdarene et al. (2010).
A aproximação foi realizada em dois trechos, resultando nos polinômios (a) e (b) definidos
por
0<
≤ 2,65 ⇒
2,65 <
≤ 13,5 ⇒
(
) = −0.0001
(
+ 0.002
) = 0.00004351
− 0.0190
− 0.00020814
+ 0.0555
− 0.01762
+ 0.1656
+ 0.2592
( )
( )
(4.15)
O primeiro trecho dos dados experimentais resulta em um polinômio de 4ª ordem e o
segundo trecho em um polinômio de 3ª ordem. Na Figura 4.2 pode-se observar que esta
aproximação polinomial é bem representativa dos dados experimentais.
Se
= 0A no polinômio (a),
= 0.1656 , logo o valor da indutância de
magnetização inicial vale
= 0.1656 . O comportamento da indutância de magnetização
frente a corrente de magnetização influencia diretamente na saturação da tensão gerada. É
possível observar que
= 0A corresponde ao equilíbrio = 0 analisado na seção 2.2.1, logo
é o valor da indutância que possibilita e influencia nas condições de existência de
autoexcitação.
Embora o conjunto de equações (4.8) a (4.15) juntamente com as equações da carga e
da PRAE sejam largamente utilizadas nas simulações dinâmicas do SEIG, como apresentado,
por exemplo, em Idjdarene et al. (2010), Seyoum (2003), Kumar and Kishore (2006) e vários
outros trabalhos, a dinâmica da indutância de magnetização não é levada em consideração
neste caso. Uma melhor aproximação do modelo é obtida quando esta dinâmica é considerada
(Bodson and Kiselychnyk, 2010b) e isso será apresentado na seção 4.2.
4.2 Modelo Matemático do SEIG Considerando a
Dinâmica da Indutância de Magnetização
Quando a dinâmica da indutância de magnetização é levada em consideração no modelo
do SEIG, obtém-se uma melhor proximidade entre o resultado de simulações e dos dados
experimentais, principalmente na forma da exponencial crescente ou decrescente resultante do
processo de autoexcitação ou perda da mesma (Bodson and Kiselychnyk, 2010b). A inserção
da dinâmica da indutância no modelo do SEIG foi apresentada por Bodson and Kiselychnyk
(2010b) e o equacionamento é apresentado a seguir.
A indutância instantânea de magnetização é definida por
59
=
onde
/
(4.16)
é o fluxo magnético no entreferro e corresponde à soma dos fluxos de estator e rotor.
A dinâmica da indutância de magnetização pode ser obtida através da derivada de
com relação a corrente de magnetização
=
(
/
)
1
=
(1/
+
)
=
1
−
1
.
(4.17)
Organizando os termos da equação (4.17) a mesma pode ser reescrita na forma
1
=
Na equação (4.18) o termo
na forma
/
é igual a
=
onde
=
/
−
1
(4.18)
.
, logo esta equação pode ser apresentada
−
(4.19)
(Bodson and Kiselychnyk, 2010b).
A equação (4.19) mostra a derivada da indutância de magnetização em função da
corrente de magnetização. É possível escrever
em termos de suas derivadas temporais
obtendo-se primeiramente a derivada da corrente de magnetização no tempo dada pela
equação (4.14) (Bodson and Kiselychnyk, 2010b). Desta forma, a derivada da amplitude da
corrente de magnetização no tempo torna-se
1
=
2
e que pode ser simplificada, pois
(2
+2
+
=
+
resultando em
)
(4.20)
60
=
1
(
+
).
(4.21)
Substituindo a equação (4.21) em (4.19) é possível escrever a indutância de
magnetização em função de derivadas temporais e resulta em
=
=
=
−
1
−
=
(
(
Lembrando que
=
+
e
=
+
Capítulo 2, podem ser reescritas na forma
=
=
⎧
⎪
⎨
⎪
⎩
+
+
=
+
=
+
+
)
+
).
(4.22)
as equações de fluxo (2.1) apresentadas no
( + )
( + )
( + )+
+
(4.23)
+
.
Substituindo as equações (4.12) e (4.13) em (4.23), as equações de fluxo resultam em
=
=
⎧
=
=
⎨
⎩
+
+
+
+
+
+
(4.24)
.
Com o auxílio das equações (4.24), as equações do modelo apresentadas pelas equações
(4.1) a (4.5) podem ser escritas levando em consideração a derivada temporal da indutância de
magnetização (Bodson and Kiselychnyk, 2010b). Os passos de cálculo podem ser verificados
nas equações (4.25) a (4.28).
−
+
+
̇
=0
61
−
−
+
+
−
−
+
+
1
1
+
−
−
+
̇ +
−
+
1
1
+
=0
(4.25)
=0
(
+
+
1
̇
+
+
+
)=0
̇ +
− −
+
+
(
+
1
+
(
̇ +
)+
1
)=0
̇ +
(4.26)
1
=0
̇
−
−
−
+
+
+
+
+
+
1
1
=0
(
̇ +
+
1
)=0
̇ +
1
=0
(4.27)
̇
−
−
+
−
−
+
+
−
+
−
+
+
−
+
+
1
–
1
=0
(
+
+
1
̇ +
+
1
)=0
̇ +
(4.28)
=0
A equação (4.22) apresenta dois termos de corrente em função de derivadas temporais.
Como
=
+
e
=
+ , a derivada de tais variáveis podem ser substituídas
por
̇ = ̇ + ̇
(4.29)
̇ = ̇ + ̇
(4.30)
62
e resultam em
−
=
( ̇ + ̇ )+
̇ + ̇
(4.31)
.
Nas equações (4.25) a (4.28), o termo
/ pode ser substituído pela equação (4.31)
e com o auxílio das equações (4.12), (4.13), (4.29) e (4.30) o modelo do SEIG com a
dinâmica da indutância de magnetização resulta nas equações
+
1
=−
−
=−
+
(
+
1
̇ +
−
+
1
−
−
−
̇ −
1
−
(
1
(
+
=−
=−
−
(
+
1
1
=0
(
−
+
1
̇ −
(4.32)
−
−
)
̇ −
1
̇ −
̇ −
=0
1
) ̇ −
̇ −
+
1
−
+
−
̇ −
+
−
̇
(4.33)
)−
−
1
1
+
) ̇ −
1
−
−
1
−
+
1
̇ +
−
−
=−
1
̇ −
−
−
1
̇ −
) ̇ −
1
̇ −
1
(
1
−
+
−
̇ −
(4.34)
) ̇ −
63
=−
+
+
1
−
−
1
1
̇ −
̇
+
1
−
−
+
̇ −
1
̇ +
−
+
+
(
+
̇
(4.35)
)
+
=
Chamando
=
̇ −
1
−
−
1
−
=−
+
+
=
,
+
=
,
e
, as equações (4.32) a (4.35) resultam em um sistema de equações não lineares que
podem ser escritas na forma matricial,
̇+
=
(4.36)
+
onde
−
=
(
−
−
−
+
)
−
−
(
−
0
0
0
−
0
( +
−
−
)
−
−
−
(
+
⎤
⎥,
⎥
⎦
̇
⎡ ̇ ⎤
̇ = ⎢ ⎥ ,
⎢ ̇ ⎥
⎣ ̇ ⎦
0
−
−
)
0
−
−
−
)
−
⎡
= ⎢
⎢
⎣
=
+
−
⎡
=⎢
⎢
⎣
(
(
0
−
+
⎤
⎥,
⎥
⎦
0
−
,
0
+
)
,
=
−
0
.
A equação (4.36) pode ser escrita na forma de variáveis de estado,
̇=
−
−
(4.37)
e resulta no modelo final do gerador de indução contendo o modelo dinâmico da indutância de
magnetização.
64
4.2.1 Dinâmica da Indutância de Magnetização e Ajuste de Curvas
Os polinômios apresentados na equação (4.15) representam os valores da indutância de
magnetização em função da corrente de magnetização. A dinâmica da indutância de
magnetização apresentada na equação (4.19) é reapresentada novamente na equação (4.38).
=
−
⇒
=
/
−
(4.38)
Como
=
, o termo
é o resultado obtido da derivada da indutância de
magnetização multiplicada pela corrente de magnetização . Como
é definida por dois
polinômios, o mesmo acontecerá com . A partir da equação (4.15) chega-se aos polinômios
( ̇) e ( ̇) .
0<
2,65 <
≤ 2,65 ⇒
(
≤ 13,5 ⇒
) = −0.0005
(
+ 0.008
) = 0.00001741
− 0.0570
− 0.0006244
+ 0.111
+ 0.1656
− 0.03524
( ̇)
+ 0.2592
( ̇)
(4.39)
A Figura 4.3 mostra a curva de
( ) na cor preta e a sua derivada na cor azul.
Embora a aproximação polinomial de
seja contínua, a mesma não é diferenciável no ponto
de contato dos dois polinômios, o que causa a descontinuidade visível na curva da derivada de
.
Lm e sua derivada (H)
0.2
0.15
0.1
Descontinuidade
0.05
0
0
2
4
6
8
Corrente de Magnetização im(A)
10
12
Figura 4.3: Descontinuidade da derivada da função de
(
).
65
Para eliminar tal descontinuidade sem modificar significativamente a aproximação
polinomial já obtida, é proposto neste trabalho um terceiro polinômio que visa suavizar a
curva de
em uma vizinhança do ponto de descontinuidade da derivada de
. Este
polinômio deve garantir a continuidade tanto de
quanto de
, eliminando a
descontinuidade existente na transição do polinômio (a) para o polinômio (b) em .
Sejam
e
duas correntes de magnetização distintas e próximas do ponto de
descontinuidade
= 2.65 , tais que
≤ 2.65 ≤
. Um polinômio de terceira ordem na
forma
(
)=
0
+
1
+
2
+
(4.40)
3
pode ser obtido através da solução do sistema de equações apresentado na equação
1
⎡
⎢1
⎢0
⎢
⎣0
1
1
2
2
3
3
⎤
⎥
⎥
⎥
⎦
(
(
(
(
⎡
=⎢
⎢
⎣
)
⎤
)
⎥.
)⎥
)⎦
(4.41)
A obtenção de um melhor ajuste do polinômio de terceira ordem pode ser mais bem
alcançada se for considerado um intervalo maior entre os valores de
e
para a transição
entre os polinômios (a) e (b). Para esta aproximação foi considerado
= 2.58 e
=
3.05 .
Na equação (4.41), ( ), ( ), ( ) e ( ), são os valores de
e da sua
derivada para os respectivos polinômios (a) e (b) nos pontos de corrente mencionados
anteriormente.
A solução da equação (4.41) resulta no polinômio (c).
(
) = 0.007903
− 0.076060
+ 0.225420
+ 0.001200
Este polinômio garante a continuidade de
e de sua derivada nos pontos
dividem a aproximação polinominal de
agora em três trechos.
(c)
e
(4.42)
, os quais
Na Figura 4.4 é possível observar as curvas de
(curva de cor preta) e de (curva de
cor azul) com o ajuste do polinômio apresentado na equação (4.42) e que aparece na cor
vermelha.
66
0.2
Divergência
dos polinômios
Lm e L L (H)
0.15
0.1
P11
P12
0.05
P21 P22
0
0
5
10
Corrente de Magnetização im(A)
15
Figura 4.4: Aproximação continuamente diferenciável e divergência dos polinômios
e ̇.
A indutância de magnetização satura para valores de 30 a 40% da corrente nominal do
gerador (Seyoum, 2003) e para valores elevados de
os valores de
e de
tendem a
zero. O gráfico da Figura 4.4 mostra que os polinômios
e ̇ não representam esta
característica e divergem a partir de um determinado valor de corrente de magnetização. A
fim de fazer com que
e
aproximem-se de zero quando a corrente de magnetização for
elevada, uma nova aproximação das curvas é proposta com a utilização de exponenciais. Os
pontos
,
,
e
mostrados no gráfico da Figura 4.4, podem ser utilizados para fazer
esta aproximação que pode ser obtida da equação (4.43).
(
)=
(4.43)
( ) − log
( ) ]/(
( )/
onde = [log
−
),
=
,
,
,
são os respectivos valores de corrente de magnetização e
são os respectivos valores de
ou para o ponto de corrente em questão.
e os valores
( )e
( )
Como resultados, as funções
e
são aproximadas por quatro trechos, de acordo
com cada intervalo da corrente de magnetização, na forma:
Para 0 <
≤ 2,58
⇒
(
)⇒ ( )e
(
) ⇒ ( ̇ ).
(
) = −0.0001
+ 0.002
− 0.0190
+ 0.0555
+ 0.1656
( )
(
) = −0.0005
+ 0.008
− 0.0570
+ 0.1110
+ 0.1656
( ̇)
(4.44)
67
Para 2,58 <
≤ 3.05
(
⇒
)⇒ ( )e
(
) ⇒ ( ̇ ).
(
) = 0.007903
− 0.07606
+ 0.22542
+ 0.0012
( )
(
) = 0.031612
− 0.22818
+ 0.45084
+ 0.0012
( ̇)
(4.45)
Para 3,05 < i ≤ 10.0A ⇒ L (i ) ⇒ (b) e para 3,05 < i ≤ 9.50A L (i ) ⇒ (ḃ ).
Para
(
) = 0.0000435
(
) = 0.000174
− 0.000624
> 10,0
(
⇒
− 0.000208
(
) = 0.1937
(
) = 0.0240
− 0.01762
− 0.03524
) ⇒ ( ) e para
+ 0.2592
( )
( ̇)
+ 0.2592
> 9.5
(
(4.46)
) ⇒ ( ).
.
( )
.
( )
(4.47)
A Figura 4.5 mostra as curvas de
e
para toda a faixa de existência de . As
curvas de cor verde representam as aproximações exponenciais definidas pelas nomenclaturas
(d) e (e).
0.2
Lm e L L (H)
0.15
0.1
0.05
0
0
2
4
6
8
10
12
14
Corrente de Magnetização im(A)
Figura 4.5: Curvas de
e
16
18
para toda a faixa de
20
.
68
4.3 Simulação do SEIG
As equações (4.7) e (4.37) definem o modelo dinâmico do GI respectivamente sem e
com a dinâmica da indutância de magnetização. O modelo completo do SEIG é finalizado
com a apresentação das equações da carga e da PRAE, apresentadas anteriormente no
Capítulo 2, mas agora na forma
onde
=
∫
=
e
∫
=
(
−
−
)
(4.48)
=
(
−
−
)
(4.49)
.
A implementação do modelo dinâmico e as simulações foram realizadas no ambiente
SIMULINK do MATLAB. As Figuras 4.6 e 4.7 mostram respectivamente as simulações
para os modelos com e sem a dinâmica da indutância de magnetização.
2
Tensão Vds
Tensão de eixo direto Vds (pu)
1.5
Valor RMS
1
0.5
0
-0.5
-1
-1.5
-2
0
0.5
1
1.5
2
2.5
t(s)
3
3.5
4
4.5
Figura 4.6: Simulação do SEIG sem a dinâmica de
5
.
Pode-se observar que a envoltória da tensão gerada difere consideravelmente entre os
dois modelos e pode ser mais bem visualizada através dos valores RMS para os dois modelos,
ambos plotados no mesmo gráfico da Figura 4.7. Nota-se que no modelo sem a dinâmica de
, o regime permanente é atingido em um tempo maior que no modelo que considera a
dinâmica de
. Como este último modelo é mais completo, é provável que o mesmo
69
represente melhor o comportamento real do SEIG e será, portanto, utilizado deste ponto em
diante.
2
Tensão Vds
Tensão de eixo direto Vds (pu)
1.5
Valor RMS com dinâm. Lm
Valor RMS sem dinâm. Lm
1
0.5
0
-0.5
-1
-1.5
-2
0
0.5
1
1.5
2
2.5
t(s)
3
3.5
4
4.5
5
Figura 4.7: Simulação do SEIG considerando a dinâmica de
.
4.3.1 Disparo da Autoexcitação e Amplitude da Tensão Gerada
Foi verificado nas seções 2.2 a 2.4, que se o equilíbrio = 0 for instável devido aos
próprios parâmetros internos do gerador e às condições de carga, PRAE e velocidade
mecânica, a autoexcitação ocorre se existirem condições iniciais de magnetismo residual no
rotor ou tensão inicial nos capacitores de autoexcitação definidas no vetor de condições
iniciais .
A Figura 4.8 (a) mostra o disparo da autoexcitação através da existência de magnetismo
residual no rotor do gerador (autoexcitação espontânea) e o gráfico da Figura 4.8 (b) o disparo
com uma tensão inicial nos capacitores de autoexcitação (autoexcitação forçada).
Embora a autoexcitação ocorra quando existe magnetismo residual no rotor, a
estabilização da tensão é alcançada em um tempo maior se comparada ao caso onde existe
uma tensão inicial
no capacitor de autoexcitação. Para o caso da Figura 4.8 (b), a tensão
inicial no capacitor de autoexcitação aplicada equivale a 0.66pu e se a mesma for aumentada,
a autoexcitação irá ocorrer em um tempo menor. Tal fato ocorre, pois a corrente de
magnetização aumenta imediatamente quando existe uma tensão inicial nos capacitores de
autoexcitação, o que por consequência aumenta o fluxo magnético no entreferro do gerador e
propicia o disparo da autoexcitação. As simulações apresentadas nas Figuras 4.8 e 4.9
consideram uma tensão inicial
|
= 0.579 .
70
Vds (pu)
1
0
-1
0
0.5
1
1.5
t(s)
2
2.5
3
2
2.5
3
(a)
Vds (pu)
1
Vceq0
0
-1
0
0.5
1
1.5
t(s)
(b)
Figura 4.8: Disparo da Autoexcitação. (a) Com magnetismo residual no rotor. (b) Com
tensão inicial em
.
Vds (pu)
A amplitude do valor da tensão gerada depende da velocidade mecânica do rotor
(Seyoum, 2003). A Figura 4.9 mostra os valores da tensão gerada em torno da RO, desta
forma os gráficos (a), (b) e (c) da figura resultam das mesmas condições de carga, PRAE e
| , porém com velocidades mecânicas de 0.9, 1.0 e 1.1pu respectivamente.
X: 1.933
Y: 0.7698
1
0
-1
0
0.2
0.4
0.6
0.8
1
t(s)
1.2
1.4
1.6
1.8
2
Vds (pu)
(a)
X: 1.933
Y: 0.8977
1
0
-1
0
0.2
0.4
0.6
0.8
1
t(s)
1.2
1.4
1.6
1.8
2
V ds (pu)
(b)
X: 1.933
Y: 0.979
1
0
-1
0
0.2
0.4
0.6
0.8
1
t(s)
(c)
1.2
1.4
1.6
1.8
2
V
ds
RMS
Figura 4.9: Tensão gerada em função do aumento da velocidade mecânica: (a)
(b)
= 1.0 . (c)
= 1.1 .
= 0.9
.
71
4.3.2 Saturação e Autoexcitação sob o Ponto de Vista Dinâmico
Seyoum (2003) menciona que a curva de
apresentada novamente na Figura
4.10, apresenta trechos que tornam o SEIG instável ou estável. Desta forma o trecho AB é
dito instável e o trecho BC estável. Na verdade, deve-se diferenciar a condição de existência
de autoexcitação da condição de operação na qual o SEIG acomoda quando autoexcitado. A
primeira depende unicamente de
, que determina a estabilidade do equilíbrio = 0. A
segunda depende do comportamento de
em função de
e determina a acomodação do
SEIG em determinada amplitude e frequência de tensão gerada e que está associada à
existência de um ciclo-limite (Bodson and Kiselychnyk, 2010a).
Observa-se que durante o processo de autoexcitação, que se inicia no trecho AB da
curva de magnetização, se a região de existência de autoexcitação produzida pela PRAE
dimensionada a partir de
e
não envolver mais a RO (diminuição da
velocidade mecânica ou aumento da carga elétrica) a autoexcitação é perdida. Na prática o
SEIG é acionado sem carga e isso faz com que a RO seja sempre envolvida pela região de
existência de autoexcitação promovida pela PRAE originada do dimensionamento
mencionado anteriormente.
B
0.2
P1
A
X: 5.42
Y: 0.1645
Lm (H)
0.15
P2
0.1
X: 11.24
Y: 0.09805
C
0.05
0
0
2
4
6
8
10
12
14
Corrente de Magnetização im(A)
16
18
20
Figura 4.10: Curva de magnetização e trechos de operação.
Uma vez que a autoexcitação ocorre, o gerador passa do trecho AB da curva de
magnetização e só acomoda no trecho BC, no qual
decresce com o aumento de . Isso
pode ser observado na Figura 4.11, que mostra o processo de autoexcitação para o gerador
operando sem carga e com PRAE dimensionada para carga nula.
72
Vds (pu)
1
0
-1
0
5
10
15
20
25
30
35
40
45
Lm (H)
t(s)
0.2
0.1
0
(a)
X: 2.541
Y: 0.1673
0
5
10
15
20
X: 42.56
Y: 0.1645
25
30
35
40
45
25
30
35
40
45
t(s)
Im(A)
(b)
5
0
0
5
10
15
20
t(s)
(c)
Figura 4.11: Autoexcitação do GI sem carga com
= 0.374 dimensionada para
carga nula. (a) Tensão
. (b) Indutância de magnetização. (c) Corrente de Magnetização.
A Figura 4.12 mostra as mesmas condições de velocidade e carga para o caso anterior,
porém a PRAE é aumentada para
= 0.614 (dimensionada a partir de
com
Vds (pu)
= 1.0 e
).
0.5
1
1
0
-1
0
Lm (H)
= 0.9
0.2
0.1
0
1.5
2
0.5
3
3.5
4
4.5
5
(a)
X: 0.1557
Y: 0.169
0
2.5
t(s)
X: 4.752
Y: 0.09806
1
1.5
2
2.5
t(s)
3
3.5
4
4.5
5
3
3.5
4
4.5
5
Im(A)
(b)
10
0
0
0.5
1
1.5
2
2.5
t(s)
(c)
Figura 4.12: Autoexcitação do GI sem carga com
= 0.614
= 1.1 (
= 1.0) e
= 0.9 . (a) Tensão
magnetização. (c) Corrente de Magnetização.
dimensionada para
. (b) Indutância de
73
É possível observar que além da autoexcitação ocorrer em um tempo menor quando a
PRAE é maior, a corrente de magnetização torna-se aproximadamente duas vezes maior, o
que resulta em um
final menor. Além disso, a amplitude da tensão gerada é maior quando
a PRAE é maior. Os valores de
atingidos em regime permanente nos dois casos são
representados pelos pontos
e
na Figura 4.10. A partir do ponto
(caso em que
= 0.614 ), se uma carga for aplicada até o limite de 1.1pu, a corrente de
magnetização diminui devido à existência de corrente na carga e o valor de
tende a
excursionar no sentido da seta indicada na Figura 4.10. Embora o valor de
excursione em
direção ao ponto , até este não ser atingido não ocorre a perda de autoexcitação. Isto porque
o valor de
aumenta com a redução da corrente de magnetização e o aumento de
reforça
a autoexcitação do gerador. Desta forma o trecho
constitui o trecho em que a operação do
gerador é possível, uma vez autoexcitado. Entretanto, nesta condição o gerador não opera em
um ponto de equilíbrio e sim em um ciclo-limite.
Um caso de perda de autoexcitação é apresentado nos gráficos da Figura 4.13. Para este
caso é aplicada uma
= 0.614
e velocidade mecânica
= 0.9 . No
instante = 4.0 a carga
= 1.1 com
= 1.0 é conectada aos terminais do gerador.
Devido à conexão da carga, a corrente de magnetização e o fluxo magnético (Figuras 4.13 (a)
e (b)) diminuem imediatamente, porém estabilizam-se no instante = 6 . No instante = 7
é aplicado mais 0.25pu de carga resultando em uma sobrecarga total de 0.35pu, o que faz com
que a corrente de magnetização e o fluxo voltem a diminuir chegando a zero e a autoexcitação
seja perdida.
im (A)
10
5
0
0
5
10
15
20
25
t(s)
30
35
40
45
50
30
35
40
45
50
Fluxo (Wb)
(a)
1
0.5
0
0
5
10
15
20
25
t(s)
(b)
Figura 4.13: Autoexcitação e sua perda por aplicação de sobrecarga. (a) Corrente de
magnetização. (b) Fluxo magnético.
A Figura 4.14 mostra as variações que
sofre à medida que a carga é aplicada ao
gerador. Na aplicação da sobrecarga máxima (0.35pu),
atinge o ponto B da curva de
magnetização o que desencadeia a perda da autoexcitação.
74
Sob o ponto de vista da autoexcitação, quanto menor o valor de
obtido com a
saturação através do aumento da PRAE, mais carga pode ser conectada aos terminais do GI
até que o ponto B da curva de magnetização seja atingido.
0.2
Lm (H)
0.15
0.1
0.05
0
0
5
10
15
20
25
30
35
40
45
t(s)
Figura 4.14: Dinâmica de
na autoexcitação e na perda da mesma devido à aplicação de
sobrecarga no GI. A autoexcitação é perdida em = 7 .
Embora o aumento da PRAE permita que mais carga seja conectada aos terminais do
GI, isso leva o gerador a operar com mais saturação o que pode provocar aumento nas perdas
da máquina.
Outro fato a ser analisado é que quando a carga
= 1.1 é aplicada, o valor de
chega próximo ao valor de
sem perda de autoexcitação. Devido ao fato de
atingir um
valor máximo que ocorre para
≠ 0 (ponto B da Figura 4.10), a sobrecarga necessária
para fazer com que a autoexcitação seja perdida depende deste valor máximo denomindado
. Somente se tal valor for alcançado a autoexcitação é perdida. Eventualmente este
ponto pode ser alcançado transitoriamente sem ocorrer à perda de autoexcitação, contudo o
ponto de operação deve situar-se na região de
entre o trecho BC.
É possível então afirmar que se a sobrecarga máxima admitida pelo SEIG corresponde
ao valor máximo de
, quanto maior for este valor, maior é a sobrecarga suportável
considerando a velocidade mecânica constante. Logo
garante que uma sobrecarga
maior que
pode ocorrer sem a perda da autoexcitação se a PRAE foi projetada a
partir da
e
.
Os gráficos (a) e (b) da Figura 4.15 mostram o comportamento da tensão e da corrente
da carga ao longo tempo para o último caso analisado. Nesta figura é possível observar que
para a condição de sobrecarga logo acima de 1.1pu, a autoexcitação é perdida e o valor da
tensão leva um longo tempo para chegar a zero como mencionado em Bodson and
Kiselychnyk (2012).
75
Vds (A)
1
Vds(pu)
RMS (pu)
0
-1
0
5
10
15
20
25
t(s)
30
35
40
45
50
Corrente da carga (A)
(a)
1
Icarga ds(pu)
RMS (pu)
0
-1
0
5
10
15
20
25
t(s)
30
35
40
45
50
(b)
Figura 4.15: Autoexcitação e sua perda por aplicação de sobrecarga. (a) Tensão
Corrente da carga eixo direto.
. (b)
4.3.3 Simulação do SEIG para Diferentes Cargas em Torno da RO
Nas seções 4.3.1 e 4.3.2, os resultados obtidos para tensões e correntes foram
apresentados em termos de eixo direto e quadratura proveniente do modelo matemático do
SEIG. A transformada inversa
cos ( )
sin ( )
1
⎡
⎤
2
2
⎢cos ( − ) sin ( − ) 1⎥
=⎢
3
3
⎥
2
2
⎢
⎥
⎣cos ( + 3 ) sin ( + 3 ) 1⎦
(4.50)
quando aplicada a quaisquer variáveis apresentados nos eixos
, permitem que estas sejam
expressas no eixo de coordenadas
, sendo = ∫ ( ) (Reginatto, 2006). Desta forma
uma variável qualquer (tensão ou corrente) apresentada inicialmente nos eixos
pode ser
apresentada no sistema de coordenadas
através da utilização da equação (4.51).
cos ( )
sin ( )
1
⎡
⎤
2
2
⎢cos ( − ) sin ( − ) 1⎥
3
3
⎢
⎥
2
2
⎢
⎥
⎣cos ( + 3 ) sin ( + 3 ) 1⎦
=
(4.51)
76
Embora a seção 4.3.2 tenha mostrado que a autoexcitação ocorre para alguns valores de
,
e potência da carga
, o objetivo desta seção é mostrar que as análises
desenvolvidas no Capítulo 3 sobre o dimensionamento da PRAE e da existência da
autoexcitação em torno da RO com o auxílio da superfície
e de suas curvas de nível, são
válidas e podem ser utilizadas no projeto do SEIG. Para isso são utilizados dois casos base
apresentados a seguir.
Caso 1: Dimensionamento da PRAE e Existência de Autoexcitação para
Variação de
= .
e
Da superfície
obtida para o SEIG em estudo neste trabalho, é possível obter os
seguintes valores de PRAE e condições:
(a)
= 0.9
e
(b)
= 0.9
e
=0
(
= 1.0) ⇒
= 1.1
(
= 0.374
= 0.0) ⇒
= 1.74
A Figura 4.16 (a) mostra que a autoexcitação ocorre para a condição mínima de
= 0.374
e carga nula, embora o tempo de estabilização da amplitude da tensão
gerada seja longo.
Va (pu)
1
0
-1
0
5
10
15
20
25
30
35
40
45
25
30
35
40
45
t(s)
(a)
Va (pu)
0.01
0
-0.01
0
5
10
15
20
t(s)
(b)
Figura 4.16: Autoexcitação do gerador de indução para
1.0). (a)
= 0.374 . (b)
= 0.370 .
= 0.9
e
= 0.0
(
=
77
A Figura 4.16 (b) mostra a não ocorrência de autoexcitação para a mesma condição de
carga e velocidade, porém com uma
= 0.370 .
A Figura 4.17 mostra a posição da “raiz 1” para as duas condições de PRAE (0.374pu e
0.370pu). Isso comprova que a existência de uma raiz com parte real positiva, o que
caracteriza a instabilidade do equilíbrio = 0, é o que determina a existência ou não na
autoexcitação conforme mencionado nos Capítulos 2 e 3.
0.9015
Eixo imaginário
0.901
0.9005
Posição da raiz 1 para
PRAE=0.370pu
Posição da raiz 1 para
PRAE=0.374pu
0.9
0.8995
0.899
0.8985
0.898
-3
-2
-1
0
1
Eixo real
Figura 4.17: Localização da raiz 1 para
2
3
4
5
-5
x 10
= 0.370
e
= 0.374
.
Os valores RMS da tensão na fase “a” e da corrente de estator para o Caso 1 (b), cujo
dimensionamento da PRAE é obtido a partir da condição de
= 0.9 e
=
1.1 com
= 0, podem ser observados na Figura 4.18.
Para este caso, no instante = 3 a carga
= 1.1 (
= 0.0) é conectada aos
terminais do gerador e embora ocorra uma queda de tensão, a autoexcitação não é perdida. Os
demais casos compreendidos pelas combinações de carga variando de
= 0.0
a
= 1.1
(
= 0.0 a
= 1.0) e velocidade mecânica
= 0.9
a
= 1.1
estão contidos na RO e são envolvidos pela região de existência de
autoexcitação promovida pela PRAE de 1.74pu.
Utilizando o valor da corrente base = 19.737 , é possível observar que a corrente de
estator apresenta uma sobrecarga de aproximadamente 47.4% sem a conexão da carga
( = 14.1 ). Logo, o GI não pode operar para a condição de carga nula e PRAE de 1.74pu.
Este caso será mais bem analisado na seção 4.3.5.
78
Va (pu)
1
0.5
0
X: 5.54
Y: 0.5851
0
1
2
3
4
5
6
7
t(s)
Corrente de Estatora (pu)
(a)
1.5
1
X: 5.54
Y: 0.201
0.5
0
0
1
2
3
4
5
6
7
t(s)
(b)
Figura 4.18: Tensões e correntes para o caso 1(b). (a) Tensão fase “a”. (b) Corrente fase “a”.
Corrente Cap.a (pu)
A Figura 4.19 mostra a corrente nos capacitores e na carga para a fase “a”.
1.5
1
X: 5.54
Y: 0.9161
0.5
0
0
1
2
3
4
5
6
7
t(s)
Corrente Cargaa (pu)
(a)
1.5
1
0.5
0
X: 5.54
Y: 0.7152
0
1
2
3
4
5
6
7
t(s)
(b)
Figura 4.19: Correntes na fase “a” dos capacitores e da carga para o caso 1(b).
A Figura 4.20 mostra os gráficos da velocidade mecânica (constante) e da indutância de
magnetização para o caso em análise.
79
r (pu)
1
0.5
0
0
1
2
3
4
5
6
7
4
5
6
7
t(s)
Lm (H)
(a)
0.2
0.1
0
0
1
2
3
t(s)
(b)
Figura 4.20: Velocidade mecânica (a) e indutância de magnetização (b).
Caso 2: Aplicação de Carga e Variação da Velocidade Mecânica para o Caso 1(b)
O caso 1(b) mostrou que mesmo para a condição de maior carga e
= 0, a
autoexcitação não é perdida se a velocidade mecânica permanecer constante (Figura 4.20 (a)).
Na prática quando a carga é aplicada aos terminais do gerador, o aumento do torque elétrico
faz com que torque mecânico seja exigido da máquina primária, o que por consequência
provoca a queda da velocidade por certo tempo até que a mesma seja reestabelecida pelo
controle de velocidade da MP.
A Figura 4.21 mostra os resultados das simulações para o caso 1(b) que considera a
aplicação de = 1.1 (
= 0.0) no instante = 3 e, além disso, no instante de = 3 a
= 5 é aplicada uma variação negativa de 0.05 pu de velocidade mecânica (variação em
degrau) simulando a diminuição de velocidade decorrente da aplicação da carga no gerador.
É possível observar nas Figuras 4.21(a) e 4.21(b) que a autoexcitação começa a ser
perdida no instante de aplicação da carga e da variação da velocidade, porém quando a
velocidade volta para a condição mínima estabelecida pela RO (
), a autoexcitação é
mantida e os valores de tensão e corrente de estator voltam aos valores simulados
anteriormente sem a consideração da variação de velocidade (Figuras 4.18 (a) e (b)).
A Figura 4.22 (a) mostra a variação de velocidade e a Figura 4.22 (b) a curva de
longo do tempo.
ao
80
1
Va (pu)
X: 9.691
Y: 0.5851
0.5
0
0
1
2
3
4
5
t(s)
6
7
8
9
10
Corrente de Estatora (pu)
(a)
1.5
1
X: 9.481
Y: 0.201
0.5
0
0
1
2
3
4
5
t(s)
6
7
8
9
10
(b)
Figura 4.21: Aplicação de carga e variação de velocidade mecânica. (a) Tensão da fase "a".
(b) Corrente de estator da fase "a".
r (pu)
1
0.5
0
0
1
2
3
4
5
t(s)
6
7
8
9
10
6
7
8
9
10
0.4
X: 0.2168
Y: 0.215
Lm (H)
0.3
X: 4.389
Y: 0.2145
0.2
0.1
0
0
1
Figura 4.22: (a) Variação de
variação de .
2
3
4
5
t(s)
. (b) Comportamento de
com a aplicação de carga e
Pode ser verificado que o ponto
pode eventualmente ser alcançado do ponto de
vista transitório sem que ocorra a perda da autoexcitação como mencionado na seção 4.3.2,
porém, se o valor da velocidade não retornar para os limites de velocidade estabelecidos pela
RO, a perda da autoexcitação é inevitável.
81
4.3.4 Condições de Manutenção da Autoexcitação sob o Ponto de Vista
Dinâmico
Na seção 4.3.3 verificou-se que a autoexcitação existe para valores de PRAE obtidas
para as condições de carga e velocidade mecânica analisadas no Capítulo 3. Nesta seção é
analisada qual é a condição que possibilita a permanência da autoexcitação quando o gerador
já se encontra em operação. A condição de permanência de autoexcitação é denominada de
condição de manutenção CM.
Na seção 4.3.2 a curva de magnetização
( ) foi dividida nos trechos AB e BC. O
trecho AB apresenta os menores valores de
e, portanto, a autoexcitação geralmente ocorre
neste trecho da curva uma vez que a corrente de magnetização produzida pelo magnetismo
residual do rotor ou pela tensão inicial dos capacitores de autoexcitação é pequena, o que
resulta em valores de
que vão de
a
.
Depois que a autoexcitação ocorre devido à instabilidade do equilíbrio = 0
ocasionado pelo valor de
e demais condições de carga, PRAE e velocidade mecânica, o
gerador passa a operar no trecho BC da curva de
( ). Mesmo se a PRAE conectada ao
SEIG é resultante do dimensionamento obtido a partir de
= 0.0 e
=
0.9 , o gerador irá operar no trecho BC da curva de magnetização (ponto da Figura 4.10)
de tal forma que
<
.
A condição de manutenção CM pode ser apresentada da seguinte forma:
Se o gerador encontra-se operando no trecho BC da curva de magnetização,
consequentemente
<
e a autoexcitação é mantida se:
(a) A carga aplicada no gerador e a velocidade mecânica não saem da RO e
permaneçam fora da mesma.
Se a condição (a) for satisfeita,
nunca atinge
e se mantém neste valor, o que
acarretaria na perda da autoexcitação. Esta condição é suficiente para permitir que o SEIG
opere sem perder a autoexcitação para as condições de carga compreendida entre
a
com o fator de potência variando de
= 0.0 a
= 1.0. Logo, quanto maior o
valor da PRAE obtida a partir do dimensionamento de
e
(
= 0.0),
menor o valor de
no trecho BC da curva de magnetização e maior é a carga suportada sem
a perda da autoexcitação.
A Figura 4.23 mostra o SEIG operando com uma
= 0.374 obtida da condição
de
= 0.9 e
= 0.0 . No instante = 30 , o SEIG encontra-se no
trecho BC da curva de magnetização e é aplicada uma carga de 0.2pu com uma variação de
82
r (pu)
0.05pu de velocidade mecânica. É possível observar que a autoexcitação é mantida, pois
mesmo com a aplicação de carga ao SEIG,
não atinge
e se mantém neste valor.
1
0.5
0
5
10
15
20
25
30
35
40
25
30
35
40
45
25
30
35
40
45
im (pu)
t(s)
(a)
0.2
0.1
0
0
5
10
15
20
Lm (H)
t(s)
(b)
0.2
0.1
0
0
5
10
15
20
t(s)
(c)
Figura 4.23: Aplicação de 0.2pu de carga e variação de velocidade no trecho BC da curva de
Magnetização. (a) Velocidade mecânica . (b) Corrente de magnetização
(c) Indutância
de magnetização
.
Se uma
= 1.74
obtida da condição de
= 0.9 e
=
1.1 (
= 0.0) for conectada nos terminais do GI, a manutenção da autoexcitação é
mantida para qualquer condição de carga, FP e velocidade que estejam contidos na RO e que,
portanto, satisfazem a CM.
As Figuras 4.24(a) e (b) mostram respectivamente a corrente de magnetização e o fluxo
magnético para este caso. No instante = 2.0 é aplicada a carga máxima
=
1.1 (
= 0.0) e uma variação de 0.05pu da velocidade durante 1s (curvas de cor azul).
Observa-se que tanto a corrente de magnetização quanto o fluxo magnético voltam a aumentar
desde que a velocidade retorne para dentro das condições de velocidade da RO. Isso implica
na manutenção da autoexcitação.
As curvas de cor vermelha mostram a queda da corrente de magnetização e do fluxo
magnético e, portanto a perda da autoexcitação, se uma carga de = 1.175 (
= 0.0) é
aplicada no mesmo instante e para a mesma variação de velocidade mecânica.
É possível verificar que a autoexcitação neste caso não é perdida para um valor
imediatamente superior a
= 1.1 (
= 0.0), e isso se deve ao fato da curva de
magnetização apresentar um
, o que permite sobrecargas superiores a
conforme mencionado na seção 4.3.2.
83
im (A)
30
20
10
0
0
1
2
3
4
5
6
7
4
5
6
7
t(s)
Fluxo Magnético (Wb)
(a)
1.5
1
0.5
0
0
1
2
3
t(s)
(b)
Figura 4.24: Manutenção e perda da autoexcitação pela aplicação de carga. (a) Corrente de
magnetização. (b) Fluxo magnético. Curva azul – Aplicação de
= 1.1 (
=
0.0). Curva vermelha - Aplicação de
= 1.175 (
= 0.0).
Todas as análises desenvolvidas mostram que se a PRAE for dimensionada a partir de
(
= 0.0) e
, qualquer condição de carga aplicada ao SEIG e que se
encontre dentro da RO, não acarreta em perda da autoexcitação desde que a velocidade do
rotor retorne ao seu valor inicial (
). Embora tal fato seja atrativo do ponto de vista
de projeto, a seção 4.3.3 mostrou que a corrente de estator torna-se muito elevada se tal PRAE
for utilizada sem a conexão de nenhuma carga nos terminais do gerador.
4.3.5 Regime Operativo
No Capítulo 3, a análise da frequência elétrica da tensão gerada mostrou que existe um
valor de PRAE que permite variações de frequência inferiores a 3% para qualquer condição
de carga envolvida pela RO. Para o SEIG em estudo, uma
= 1.74 e uma velocidade
= 1.05 , a princípio permitem esta condição de frequência elétrica. A Figura 4.25
mostra que se o SEIG operar com esta velocidade e PRAE, para qualquer condição de carga
que se encontre dentro da RO, a frequência elétrica da tensão gerada não varia mais do que
3%. No gráfico da Figura 4.25, a curva na cor preta é a tensão gerada para carga nula, a curva
vermelha para
= 1.1 (
= 1.0) e a curva azul para
= 1.1 (
=
0.0). É possível observar que para a condição de carga nula ou carga máxima ativa, a
frequência elétrica é igual e vale 62.5Hz. Quando a carga máxima é reativa indutiva, o valor
da frequência elétrica aumenta (conforme análise do Capítulo 3) para 66.67Hz, ocorrendo
84
uma variação de 4.16%.
X: 1.826
Y: 0.9722
X: 1.828
Y: 1.032
X: 1.842
Y: 0.9722
X: 1.844
Y: 1.032
Tensaõ na fase "a" (pu)
1
0.5
0
-0.5
-1
1.825
X: 1.831
Y: -1.22
1.83
1.835
t(s)
1.84
X: 1.846
Y: -1.22
1.845
Figura 4.25: Variação da frequência elétrica da tensão gerada para
= 1.74 ,
= 1.05
e aplicação de carga. Curva preta –
= 0.0 . Curva vermelha –
= 1.1 (
= 1.0). Curva azul = 1.1 (
= 0.0).
Embora a variação de frequência elétrica verificada sob o ponto de vista dinâmico seja
maior que a analisada no Capítulo 3, para as condições reais de carga normalmente
conectadas em sistemas elétricos, ou seja, com FP entre 0.6 a 0.85 (Idjdarene et al., 2010) a
frequência elétrica não sofre variações maiores que 3% como mostra a Figura 4.26.
X: 1.829
Y: 1.179
1
X: 1.845
Y: 1.178
Tensão na fase "a" (pu)
X: 1.826
Y: 0.9715
X: 1.842
Y: 0.9715
0.5
0
-0.5
-1
1.825
1.83
1.835
t(s)
1.84
1.845
1.85
Figura 4.26: Variação da frequência elétrica da tensão gerada para
= 1.74 ,
= 1.05 e aplicação de carga. Curva preta –
= 0.0 . Curva ver –
=
1.1 (
= 0.7).
85
A curva de cor preta da Figura 4.26 mostra a tensão gerada para a condição de carga
nula,
= 1.74 e
= 1.05 . A curva de cor verde mostra a tensão gerada para as
mesmas condições de PRAE e velocidade, porém com
= 1.1 (
= 0.7). É
possível observar que a frequência elétrica da tensão gerada não sofre nenhuma alteração.
Embora a
= 1.74
atenda as condições de frequência elétrica e de
autoexcitação para toda a região operativa, como mencionado nas seções 4.3.3 e 4.3.4 a
corrente de estator torna-se elevada.
Do ponto de vista prático, se o gerador em estudo operar com
= 1.05 , uma
= 0.5 pode inicialmente ser aplicada. Tal PRAE faz com que a corrente de estator
fique próxima a corrente nominal. À medida que carga indutiva é aplicada, mais PRAE pode
ser conectada (até o limite de
= 1.74 ) a fim de manter a autoexcitação. Para este
caso, se carga ativa for aplicada até o limite
= 1.1 (
= 1.0) nos terminais do
gerador, a corrente de estator ficará sempre dentro dos limites nominais de operação.
4.4 Conclusões
Neste capítulo o modelo do SEIG é apresentado de uma forma mais completa, pois leva
em consideração a dinâmica da indutância de magnetização o que permite que tal modelo
represente melhor o SEIG. Através das simulações deste modelo, é possível observar que as
superfícies de projeto e suas curvas de nível podem ser utilizadas no projeto do SEIG, pois a
autoexcitação é garantida para todas as condições de potência elétrica da carga que são
envolvidas pela região operativa. Mesmo para as condições transitórias de velocidade que
ocorrem na prática durante a aplicação da carga, a autoexcitação é mantida se a velocidade
voltar à condição inicial.
Se o SEIG encontra-se autoexcitado, o mesmo admite uma sobrecarga maior que a
potência máxima operativa devido ao valor de
da curva de magnetização. Portanto, a
característica da curva de magnetização intrínseca a cada máquina, pois esta depende dos
aspectos construtivos da mesma, permite que maiores sobrecargas sejam suportadas pelo
SEIG sem a perda da autoexcitação. Logo, geradores que apresentam curvas de magnetização
com
mais elevados suportam maiores sobrecargas.
A frequência elétrica da tensão gerada situa-se dentro de variações menores que 3%
quando o FP da carga encontra-se acima de 0.6 e a velocidade mecânica em 1.05pu, com a
PRAE projetada a partir da potência operativa máxima e da menor velocidade mecânica. As
simulações mostram que embora esta PRAE mantenha as variações da frequência elétrica da
tensão gerada em condições aceitáveis para sistemas operando de forma isolada e que esta
PRAE propicia e mantém a autoexcitação para todas as condições de carga aplicada ao GI, tal
PRAE faz com que a corrente de estator do gerador apresente sobrecarga quando a potência
da carga aplicada ao SEIG é nula.
86
Este problema pode ser resolvido com a conexão de 0.5pu de PRAE (para o gerador em
estudo), o que faz com que a corrente de estator fique dentro dos valores nominais de
operação. A medida que a carga é conectada, PRAE pode ser inserida ou retirada a fim de
permitir que a corrente do estator não ultrapasse as condições nominais de corrente.
Capítulo 5
Bancada para Estudos com Geração
Assíncrona e Resultados Experimentais
As análises desenvolvidas nos capítulos anteriores mostram que a autoexcitação nos
geradores de indução em torno das regiões operativas depende da PRAE, da velocidade
mecânica do rotor e da carga e seu FP. As simulações dinâmicas comprovam que se a PRAE
for dimensionada para a velocidade operativa mínima e carga máxima com o menor FP, esta
PRAE é capaz de envolver as demais condições em torno da RO. A fim de confrontar os
resultados obtidos nos capítulos anteriores, neste capítulo é apresentado em linhas gerais o
protótipo de uma bancada para estudos com geração assíncrona e alguns resultados
experimentais obtidos com a mesma.
Na seção 5.1 é apresentada a bancada experimental desenvolvida e embora o
desenvolvimento desta bancada seja parte integrante dos objetivos deste trabalho de
dissertação, são apresentadas apenas suas características básicas, ficando os detalhes técnicos
específicos apresentados em Mayer (2012). A bancada foi desenvolvida no laboratório de
Máquinas Elétricas com recursos da Universidade Tecnológica Federal do Paraná – UTFPR
Campus Medianeira.
Os resultados experimentais obtidos com o protótipo são apresentados na seção 5.2, os
quais são confrontados com simulações do modelo dinâmico do SEIG empregando a
modelagem dinâmica desenvolvida no Capítulo 4. Por fim, a seção 5.3 mostra as conclusões
do capítulo.
5.1 Bancada para Estudos com Geração Assíncrona
Com o objetivo de possibilitar a obtenção de dados experimentais de um sistema de
geração assíncrona, foi implementado o protótipo laboratorial de um SEIG. O protótipo
contempla a estrutura apresentada no Capítulo 2 e reproduzida na Figura 5.1 por questão de
simplicidade. Consiste em um conjunto mecânico composto por duas máquinas de indução
acopladas eixo a eixo e que desempenham o papel da máquina primária MP e do gerador de
87
88
indução GI, este último conectado a carga e aos capacitores de autoexcitação.
Figura 5.1: Esquema de montagem mecânica e elétrica do SEIG.
Além da montagem mecânica do conjunto constituído pela MP e pelo GI, dois quadros
de comando e força, responsáveis pelo acionamento, controle e aquisição de dados, foram
montados e formam a bancada para estudos com geração assíncrona.
A Figura 5.2 mostra um diagrama unifilar esquemático que permite visualizar os
principais componentes que constituem a bancada e entender o funcionamento da mesma.
Nesta figura estão destacados através de retângulos de linhas vermelhas tracejadas, o
“CONJUNTO MECÂNICO”, o quadro de comando e força da MP e do GI, denominado
“QUADRO MP/GI” e o quadro de comando e força do banco de capacitores de autoexcitação,
denominado de “QUADRO BC”.
O barramento da esquerda do quadro MP, denominado “Barramento Geral do Quadro”,
é responsável por fornecer potência via inversor de frequência IF para a MP. O barramento da
direita denominado “Barramento Geral do GI”, faz a conexão entre os terminais do GI, o
quadro BC e as cargas.
Quando a MP é posta em funcionamento a uma determinada velocidade configurada no
inversor, o fechamento da chave contatora C1 conecta o GI ao seu barramento geral. O quadro
BC é responsável pela aplicação de PRAE no barramento geral do GI, logo, com o
fechamento das chaves contatoras C2 e C7, a autoexcitação pode ocorrer e o SEIG passa a
operar. Logo abaixo do barramento geral do GI, está localizado o “Barramento da Carga” e o
fechamento das chaves contatoras C3 a C5, fazem a conexão da carga ao barramento geral do
GI. A chave contatora C6 pode ser utilizada para a conexão do GI em paralelo com a rede da
concessionária, mas este caso foge ao escopo deste trabalho.
A bancada possui vários sensores de tensão, denominados por ST e sensores de corrente
denominados por SC, que são responsáveis pela medição dos valores instantâneos de tais
grandezas. O conjunto mecânico possui sensores de temperatura STe inseridos no
enrolamento do estator de ambas as máquinas e que são utilizados para o monitoramento
destas grandezas durante a operação do SEIG. O GI possui acoplado diretamente ao seu eixo,
um sensor de velocidade do tipo encoder incremental, denominado na Figura 5.2 por ENC.
89
Figura 5.2: Diagrama unifilar e esquema de funcionamento da bancada para estudos com
geração assíncrona.
Todos os sinais dos sensores seguem para um sistema de aquisição de dados da
National Instruments - cDAQ 9178. Tal sistema de aquisição possui módulos específicos para
leitura de sinais analógicos de corrente, tensão e velocidade (frequência de pulsos). Este
dispositivo possui ainda módulos específicos de saída analógica em corrente e que podem ser
utilizados para fazer o controle da velocidade da MP via inversor de frequência. Módulos de
saídas digitais também estão presentes na configuração do cDAQ e são utilizados para o
fechamento das chaves contatoras apresentadas na Figura 5.2.
Os dados aquisitados pelo cDAQ 9178 podem ser encaminhados ao computador via
90
conexão USB. O software LABVIEW permite via programação, que todos os sinais
provenientes dos sensores sejam visualizados e gravados em arquivos que podem ser
utilizados posteriormente na análise dos resultados experimentais. O software permite
também que sinais digitais sejam encaminhados para os quadros de comando e força, fazendo
com que a abertura e o fechamento das chaves contatoras sejam feitas de forma remota.
5.1.1 Conjunto Mecânico MP e GI e sua Especificação
O conjunto mecânico é constituído por duas máquinas acopladas eixo a eixo e que
desempenham o papel da máquina primária MP e do gerador de indução GI. O gerador de
indução com rotor em gaiola possui potência de 7.5kW, 380V, IV polos e corrente nominal de
14.1A quando ligado em dupla estrela. A potência do GI foi definida como sendo suficiente
para ensaios com cargas reais (sob o ponto de vista de potência e FP) e que possa atender via
simulação laboratorial, cargas elétricas que representem pequenas propriedades, como
exposto no Capítulo 1. As demais características eletromecânicas das máquinas podem ser
observadas no Apêndice B.
Geralmente as montagens laboratoriais que envolvem geração assíncrona, utilizam
como MP máquinas síncronas ou máquinas CC (Idjdarene et al., 2010; Bodson and
Kiselychnyk, 2012; Seyoum, 2003) por apresentarem um controle de velocidade de fácil
implementação. Como a potência da máquina primária deve ser no mínimo igual à potência
do gerador, a utilização de máquinas CC ou síncrona para esta finalidade torna-se inviável sob
o ponto de vista econômico. Devido a isso, optou-se pela utilização de uma segunda máquina
assíncrona de mesmas características do gerador de indução para desempenhar o papel da MP.
A montagem do conjunto mecânico resultou em um trabalho de conclusão do curso de
Tecnologia em Manutenção Industrial da UTFPR – Campus Medianeira (Betzek, F., 2011), o
qual documenta todas as etapas da montagem mecânica do conjunto assim como os resultados
dos ensaios de vibração realizados para diferentes valores de velocidade da MP. O
alinhamento final dos eixos das máquinas permitiu que as vibrações mecânicas ficassem
compreendidas dentro dos limites estabelecidos por norma, logo, o conjunto pode operar para
qualquer velocidade até 1.1pu. A Figura 5.3 mostra os detalhes do projeto mecânico do
conjunto MP e GI.
A montagem mecânica final e os detalhes das ligações dos terminais elétricos de
potência e dos sensores de temperatura STe podem ser observados na Figura 5.4.
91
Figura 5.3: Conjunto mecânico MP e GI.
Figura 5.4: Montagem mecânica do conjunto MP (esquerda) e GI (direita) e conexão dos
terminais elétricos de potência e sensores de temperatura STe.
5.1.2 Quadros de Comando e Força
Como mencionado anteriormente, a bancada para estudos com geração assíncrona
possui dois quadros de comando e força. O leiaute do quadro MP/GI pode ser observado na
Figura 5.5 e é constituído por um único módulo dividido em três partes delimitadas na figura
por retângulos de linha tracejada na cor vermelha. Na “Parte A” está localizado o barramento
geral do quadro (1) e os sensores que fazem a medição da tensão e da corrente da MP (6 e 10).
92
Este barramento geral é responsável pela alimentação de todos os sensores da bancada, além
de fornecer potência à MP via inversor de frequência (7). O inversor é protegido contra curtocircuito e sobrecargas por fusíveis ultrarrápidos e disjuntor (3).
Figura 5.5: Leiaute do quadro de comando e força da MP e do GI.
A “Parte B” deste quadro possui o barramento geral do GI (11) responsável pela
conexão entre o GI e a PRAE proveniente do BC. Tal conexão é feita através das chaves
contatoras (20) e (21). O barramento de carga (17) permite o acoplamento da carga ao
barramento geral através do acionamento das chaves contatoras (18). Todas as chaves
93
contatoras deste quadro podem ser acionadas de forma manual, através das chaves seletoras
(15), ou de forma remota via saída digital do cDAQ através do acionamento dos relés
auxiliares (2). Os sensores (12,13,14 e16) são responsáveis pela medição dos valores de
corrente e tensão do barramento da carga. Na “Parte C” encontram-se todos os bornes de
saída e entrada do quadro.
O leiaute do quadro de comando e força do BC pode ser verificado na Figura 5.6. O
banco de capacitores possui potência total de 4.0pu (30kVAr em 380Vac) dividida em cinco
módulos trifásicos que podem ser ligados individualmente no barramento geral do quadro (5).
Cada módulo trifásico é composto por células capacitivas monofásicos, desta forma três
células trifásicas são compostas por nove capacitores monofásicos de 2.5kVar. As outras duas
células trifásicas são compostas respectivamente por três células monofásicas de 1.7kVAR e
três células trifásicas de 0.83kVAr.
Figura 5.6: Leiaute do banco de capacitores BC.
94
O fechamento de todas as células monofásicas é efetuado com o acionamento das
chaves contatoras (7), que podem ser acionadas de forma manual via chaves seletoras (2), ou
de forma remota via saída digital do cDAQ através do acionamento dos relés auxiliares (10).
Os sensores (8, 9 e 11) fazem a leitura da corrente e da tensão fornecida pelo BC, cuja
potência é disponibilizada no borne (17) quando as chaves contatoras (6) são acionadas de
forma manual ou remota.
Como existe grande flexibilidade no fechamento de células capacitivas monofásicas, o
banco pode fornecer diferentes valores de PRAE. Além disso, a comutação das chaves
contatoras (6) faz com que a ligação estrela ou delta seja aberta, o que permite que a PRAE
aplicada no barramento do GI torne-se desequilibrada.
A Figura 5.7 mostra a configuração final dos quadros.
Figura 5.7: Configuração final dos quadros de comando e força MP/GI (esquerda) e BC
(direita).
5.1.3 Sensores Utilizados para Aquisição de Dados
Os sensores de corrente utilizados em ambos os quadros e que medem o valor desta
grandeza apresentam duas configurações. A primeira utiliza sensores encapsulados em um
formato industrial próprio para montagens em painéis industriais e possuem uma janela onde
é inserido o condutor cuja corrente se deseja medir, desta forma não necessita de elementos
shunts ou TCs. A segunda configuração utiliza sensores de efeito Hall e transdutores de
corrente que possibilitam a medição de elevados valores de corrente.
Todos os sensores de corrente utilizados no quadro MP/GI foram especificados de tal
forma a permitirem a medição do valor de pico máximo da corrente (em regime permanente)
para qualquer configuração de fechamento do GI ou da MP (dupla estrela, delta simples ou
95
duplo delta) o que resultou em uma faixa de medição de 50A de pico. O sinal de saída de
todos os sensores de corrente é analógico de 0 a 20mA de tal forma que reproduz o formato
da onda do sinal medido, porém em torno do valor DC de 10mA de offset.
A configuração que usa sensores por efeito Hall foi utilizada para possibilitar que
elevados valores de corrente provocados por transientes (fechamento da carga ou do BC)
possam ser medidos. Tais sensores também reproduzem o formato da onda do sinal de
corrente a ser medido com um offset de 10mA DC e saída de 0 a 20mA, porém o valor
máximo de pico que pode ser medido é de 250A. Tais sensores foram utilizados tanto no
quadro MP/GI quanto no quadro BC.
Os sensores de tensão também possuem sinal de saída de 0 a 20mA e reproduzem o
formato de onda do sinal medido utilizando a mesma lógica dos sensores de corrente. Todos
os sensores foram montados de tal forma a medirem sempre o valor da tensão de fase do
barramento em que estão conectados. Foram utilizados sensores com medição de tensão de
pico máxima de 350V e de 1500V. Desta forma, além da medição de sinais transientes de
tensão, é possível medir a tensão do GI mesmo quando este for ligado em 440Vac (delta
simples).
Todos os sensores de corrente ou tensão utilizados nos quadros MP/GI ou BC podem
realizar medições de sinais DC ou que possuem frequência de até 2000Hz. Isso garante que
mesmo sinais com componentes harmônicos de elevada ordem sejam medidos. Além disso,
todos os sensores apresentam erro de 1% a uma temperatura de 70C.
A medição da velocidade é realizada por um sensor do tipo encoder incremental de
1024 pulsos TTL, denominado anteriormente por ENC. Para o gerador operando a uma
velocidade de 1.1pu, a velocidade do eixo resulta em 1980RPM. Assim, como o encoder
fornece 1024 pulsos por rotação, o sinal do trem de pulsos possui uma frequência máxima de
33792Hz.
Os sensores de temperatura denominados por STe e que se encontram alojados no
estator das máquinas MP e GI são do tipo PT100. O sinal proveniente dos mesmos é
convertido em um sinal analógico de tensão com o auxílio de transdutores de temperatura,
cujas especificações técnicas estão disponíveis em Mayer (2012). Isso possibilita que as
medições de temperatura sejam feitas através do sistema de aquisição de dados.
5.1.4 Sistema de Aquisição de Dados e Controle de Velocidade da MP
O sistema de aquisição de dados é composto por um compact DAQ (cDAQ 9178) da
National Instruments que possui capacidade de inserção de oito módulos e que são
responsáveis pela medição dos sinais provenientes dos sensores. Os módulos apresentam as
seguintes características:
96
Módulo NI 9203 – Possui oito canais de entradas analógicos de 0 a 20mA com 16
bits de resolução com clock interno que permite uma taxa de aquisição máxima de
25k amostras/s por canal.
Módulo NI 9219 – Este módulo possui quatro canais de entradas analógicas que
permitem a medição de tensão de 0 a 10Vcc ou corrente 25mA com 24 bits de
resolução.
Módulo NI 9265 – Possui quatro saídas analógicas de 0 a 20mA com 16 bits de
resolução e tempo de resposta de 3s quando apenas uma saída é utilizada.
Módulo NI 9401 – Possui 8 canais digitais rápidos que podem ser configurados
tanto como entradas ou saídas do tipo TTL. Possui clock interno (120MHz) o que
possibilita aquisição de sinais de elevada frequência (30MHz para duas entradas).
Os sinais provenientes dos sensores de corrente e tensão são aquisitados diretamente
pelos módulos NI 9203 a uma taxa de amostragem de 1000 amostras/s. Os sinais provenientes
dos sensores de temperatura STe, depois de convertidos para valores proporcionais de tensão,
podem ser medidos pelo módulo NI 9219 a uma taxa de amostragem de 100 amostras/s.
A velocidade pode ser medida através do módulo NI 9219 com o auxílio de uma placa
conversora de trem de pulsos em valores proporcionais de tensão, adaptada de Miyadaira
(2012). Os dados necessários para a configuração desta placa são os valores da frequência
máxima do trem de pulsos (33792Hz) e a faixa de tensão proporcional resultante, configurada
de 0 a 3.3V.
Todas as medições feitas pelo sistema de aquisição de dados podem ser visualizadas online através da utilização do software LabView, responsável por possibilitar que uma interface
homem máquina IHM seja estabelecida.
Este software possui linguagem gráfica de programação e além de permitir a
visualização das grandezas aquisitadas, possibilita a manipulação dos sinais e a gravação dos
mesmos. A Figura 5.8 mostra a tela do programa desenvolvida para a presente aplicação e que
permite, por exemplo, a definição dos canais físicos do cDAQ, a escolha das grandezas a
serem medidas, o número de amostras, a taxa de amostragem e o envio das medições para
arquivo.
O controle de velocidade da MP foi obtido com o auxílio do inversor utilizado para
acioná-la. Este inversor implementa técnicas de controle em malha aberta de velocidade e
também possibilita o uso de um controlador PI interno para efetuar o controle de velocidade
em malha fechada. Neste trabalho foi utilizado o acionamento com controle de velocidade em
malha aberta com controle vetorial de fluxo e compensação de escorregamento. As respostas
da velocidade assim que aplicada a carga no gerador, foram imediatas, com baixos erros de
sobre sinal, tempo de acomodação rápido e erro de regime quase nulo. Como o enfoque do
trabalho é sobre a autoexcitação, a maior preocupação não está relacionada com o tempo da
resposta da velocidade e sim com seu valor final. Não obstante, foram feitas tentativas de
97
implementação do controle de velocidade em malha fechada com o auxílio do LabView e do
módulo de medição NI 9265, as quais se revelaram pouco úteis devido à necessidade de
modificação dos ajustes do controlador toda vez que novos ensaios eram realizados.
Figura 5.8: Tela do programa desenvolvido em LabView para manipulação e aquisição de
dados.
5.2 Resultados Experimentais
Alguns resultados experimentais obtidos com a utilização da bancada para estudos com
geração assíncrona são apresentados nesta seção. Os experimentos estão divididos em três
partes. A primeira parte mostra do ponto de vista prático, a existência e o processo da
autoexcitação para uma determinada condição de velocidade mecânica do gerador, PRAE e
potência da carga. Tais resultados são apresentados na seção 5.2.1. A segunda parte,
apresentada na seção 5.2.2, mostra os resultados do SEIG operando com uma PRAE e
velocidade mecânica de tal forma que quando a carga (
= 1.0) é conectada aos terminais
do gerador, a autoexcitação não é perdida, o que comprova os resultados apresentados nos
Capítulos 3 e 4. Na terceira parte, descrita na seção 5.2.3, a velocidade mecânica é fixada em
1.05pu e são apresentados os resultados experimentais relacionados às condições dinâmicas
operativas de frequência elétrica da tensão gerada.
5.2.1 Resultados Experimentais Sobre a Existência de Autoexcitação
Uma superfície de projeto
pode ser utilizada para encontrar as condições de
98
existência de autoexcitação para uma condição real de PRAE fornecida pelo BC e para
= 0.0 . A Figura 5.9 mostra que o valor mínimo de velocidade mecânica necessária para
que ocorra a autoexcitação com uma
= 0.452
é de aproximadamente
=
0.817 . Um valor de PRAE experimental que o BC pode fornecer é 0.453 , ou seja, um
valor um pouco acima do valor verificado na Figura 5.9, logo, para a condição real de PRAE
aplicada, o valor de velocidade deve ser menor e resulta em
= 0.815 . (valor calculado
através do algoritmo do fluxograma apresentado no Capítulo 2). Desta forma, a MP foi
ajustada inicialmente para operar com uma velocidade de 0.815pu e o BC configurado para
fornecer uma PRAE de 0.453pu. Nesta condição a autoexcitação deve ocorrer.
PRAE (pu)
0.5
0.4
0.3
0
0.2
X: 0.8174
Y: 1
Z: 0.4522
1.1
0.2
0.4
1.05
0.6
1
0.95
0.8
0.9
0.85
0.8
1
FP
r (pu)
Figura 5.9: Superfície de projeto para
= 0.0
.
O BC foi conectado ao barramento geral do GI no instante de tempo = 3.85 e os
resultados experimentais da tensão do gerador durante o processo da autoexcitação podem ser
verificados na Figura 5.10 (a).
A velocidade da MP foi ajustada via inversor de frequência em 0.815pu, porém as
medições de velocidade mostram que a mesma permaneceu um pouco acima de 0.813pu,
como pode ser verificado na Figura 5.10 (b).
O valor da tensão residual medida nos terminais do GI antes da conexão do BC
(0.013pu) foi utilizado para a obtenção (via simulação) de um magnetismo residual que
proporcionasse esta mesma amplitude de tensão para o GI operando sem PRAE. Aplicando
este valor de magnetismo residual no modelo dinâmico, foi obtido o resultado de simulação
apresentado na Figura 5.11.
99
1
Va(pu)
0.5
0
-0.5
-1
0
5
10
15
20
25
30
35
40
45
25
30
35
40
45
t(s)
r(pu)
0.813
0.812
0.811
0.81
0
5
10
15
20
t(s)
Figura 5.10: Resultados experimentais de existência de autoexcitação. Conexão do BC em
= 3.85 . (a) Tensão fase “a”. (b) Velocidade mecânica.
1
Va (pu)
0.5
0
-0.5
-1
0
5
10
15
20
25
30
35
40
45
25
30
35
40
45
t(s)
(a)
r (pu)
0.813
0.812
0.811
0.81
0
5
10
15
20
t(s)
(b)
Figura 5.11: Simulação do SEIG para as mesmas condições da Figura. 5.10. (a) Tensão fase
“a”. (b) Velocidade mecânica.
Observa-se que os resultados concordam quanto à existência de autoexcitação, contudo
o resultado de simulação mostra o processo ocorrendo de maneira mais abrupta. Além disso, a
tensão atingida em regime permanente é maior no resultado experimental que no simulado
(0.13pu). Tais diferenças podem ser resultado da imprecisão da modelagem do
comportamento não linear da indutância de magnetização, o que resulta em valores menores
100
de tensão e consequentemente de corrente.
A Figura 5.12 (a) e (b) mostra os resultados experimentais de tensão e velocidade para o
gerador operando nas mesmas condições apresentadas anteriormente (
= 0.453
e
= 0.813 ). No instante = 20 , a velocidade é propositalmente diminuída e atinge o
valor de 0.76pu, por consequência a autoexcitação é perdida.
Va(pu)
1
0
-1
0
10
20
30
t(s)
(a)
40
50
60
0
10
20
30
t(s)
(b)
40
50
60
r(pu)
0.8
0.7
0.6
0.5
Figura 5.12: Perda da autoexcitação devido a diminuição da velocidade em
Tensão fase “a”. (b) Velocidade mecânica.
= 20 . (a)
5.2.2 Existência e Manutenção da Autoexcitação
A
apresentada no Capítulo 3 que leva em consideração a
apresentada novamente na Figura 5.13.
= 1.1
é
Nesta figura é possível observar que uma
= 0.620
é capaz de garantir a
autoexcitação e a permanência da mesma para qualquer condição de carga aplicada ao gerador
( = 0.0 a
= 1.1 com
= 1.0) desde que
= 0.9 . O BC pode
fornecer uma potência reativa de autoexcitação prática de
= 0.667 . Logo, para uma
velocidade mecânica de 0.85pu, a autoexcitação deve ser mantida quando aplicada
= 1.1 .
A Figura 5.14(a), (b) e (c) mostra respectivamente a tensão de estator, a corrente da
carga e a velocidade mecânica obtida experimentalmente. No instante = 9.75 , a carga
( = 1.1 e
= 1.0) é aplicada no barramento geral do GI e embora ocorra uma queda
de tensão, a autoexcitação não é perdida, o que está em acordo com os resultados do Capítulo
3. Na Figura 5.14(b), é possível observar que no instante da aplicação da carga a corrente
drenada pela mesma é maior que 1.0pu, o que indica de fato a aplicação da sobrecarga neste
101
instante de tempo.
2.5
PRAE (pu)
2
1.5
1
0.5
0
0
1.1
0.2
0.4
1
X: 0.9008
Y: 1
Z: 0.6192
0.9
X: 0.8529
Y: 1
Z: 0.6671
0.8
0.6
0.8
FP
1
r (pu)
Va(pu)
Figura 5.13: Superfície de projeto da PRAE para
Corrente Carga(pu)
.
1
0
-1
0
r (pu)
= 1.1
5
10
15
20
25
30
35
40
45
25
30
35
40
45
25
30
35
40
45
t(s)
(a)
1
0
-1
0
5
10
15
20
t(s)
(b)
0.8
0.6
0
5
10
15
20
t(s)
(c)
Figura 5.14: Resultados experimentais da existência e manutenção da autoexcitação.
Aplicação de 1.1pu de carga em = 9.75 (a) Tensão fase “a”. (b) Corrente da carga. (c)
Velocidade mecânica.
A Figura 5.15(a), (b) e (c), mostra respectivamente os valores de tensão de estator,
corrente da carga e velocidade mecânica para a simulação deste caso. É possível observar que
o valor da corrente da carga simulada é menor que o valor da corrente obtida
experimentalmente.
102
Va (pu)
1
0
-1
r (pu)
Corrente Carga (pu)
0
5
10
15
20
25
30
35
40
45
25
30
35
40
45
25
30
35
40
45
t(s)
(a)
1
0
-1
0
5
10
15
20
t(s)
(b)
0.8
0.6
0
5
10
15
20
t(s)
(c)
Figura 5.15: Simulação do SEIG com aplicação de carga para as mesmas condições da
Figura 5.14. (a) Tensão fase “a”. (b) Corrente da carga. (c) Velocidade mecânica.
Va(pu)
Conforme as análises do Capítulo 4, quando uma sobrecarga maior que a dimensionada
a partir da
é aplicada ao SEIG, a autoexcitação é perdida. Esta perda de autoexcitação é
ilustrada na Figura 5.16, que mostra os resultados experimentais obtidos quando uma
sobrecarga de 1.35pu é aplicada aos terminais do gerador no instante = 8.85 .
1
0
-1
r (pu)
Corrente Carga(pu)
0
5
10
15
20
25
30
35
20
25
30
35
20
25
30
35
t(s)
(a)
1
0
-1
0
5
10
15
t(s)
(b)
0.8
0.6
0
5
10
15
t(s)
(c
Figura 5.16: Resultados experimentais da aplicação de sobrecarga em = 8.85 (com perda
da autoexcitação) e retirada da mesma em = 25 (com retomada da autoexcitação). (a)
Tensão fase "a". (b) Corrente Carga. (c) Velocidade mecânica.
103
É possível observar que a autoexcitação é perdida e somente volta a existir se a
condição de sobrecarga for retirada. No instante = 25 , toda a carga é retirada e a
autoexcitação inicia-se novamente. A Figura 5.17 mostra os resultados da simulação obtidos
para o mesmo caso. Novamente percebe-se a concordância geral dos resultados experimentais
e de simulação.
Va (pu)
1
0
-1
Corrente Carga (pu)
0
5
10
15
20
25
30
35
20
25
30
35
20
25
30
35
t(s)
1
0
-1
0
5
10
15
r (pu)
t(s)
0.8
0.6
0
5
10
15
t(s)
Figura 5.17: Simulação do SEIG para aplicação de sobrecarga em = 8.85 e retirada da
mesma em = 25 nas mesmas condições da Figura 5.16. (a) Tensão fase "a". (b) Corrente
da Carga. (c) Velocidade mecânica.
5.2.3 Resultados Experimentais das Condições Operativas
As simulações apresentadas no Capítulo 4 mostram que se velocidade mecânica do
gerador ficar situada acima de 1.0pu, a frequência elétrica da tensão gerada aproxima-se de
= 1.0
quando a PRAE dimensionada for resultante de
= 0.9
e
= 1.1 . A Figura 5.18 mostra os resultados experimentais para este caso. No
instante = 4.1 a carga de aproximadamente 1.4pu ( = 1.0) é conectada aos terminais do
gerador. Na Figura 5.18(a) é possível verificar o comportamento da tensão e na Figura 5.18(b)
o comportamento da corrente da carga.
A Figura 5.19 mostra novamente o gráfico da Figura 5.18(a), mas agora evidenciando o
valor da frequência elétrica antes e depois da aplicação da carga. Na Figura 5.19(a) pode ser
observado o comportamento da frequência elétrica da tensão gerada antes da aplicação da
carga e na Figura 5.19(b), depois que a carga é aplicada. É possível observar que a frequência
elétrica da tensão gerada não sofre alteração, o que está em acordo com os resultados obtidos
no Capítulo 4 via simulação.
104
2
Va(pu)
1
0
-1
-2
0
1
2
3
4
5
t(s)
6
7
8
9
10
9
10
Corrente Carga (pu)
2
1
0
-1
-2
1
2
3
4
5
t(s)
6
7
8
Figura 5.18: Resultados experimentais da variação da frequência elétrica com a aplicação de
sobrecarga (1.4pu) em = 4.1 e velocidade mecânica
= 1.05 . (a) Tensão fase "a".
(b) Corrente da Carga.
2
X: 3.877
Y: 1.675
Va(pu)
1
X: 3.893
Y: 1.694
0
-1
-2
3.85
3.86
3.87
3.88
3.89
3.9
t(s)
(a)
3.91
3.92
3.93
3.94
3.95
6.91
6.92
6.93
6.94
6.95
2
V a(pu)
1
X: 6.876
Y: 1.424
0
X: 6.892
Y: 1.404
-1
-2
6.85
6.86
6.87
6.88
6.89
6.9
t(s)
(b)
Figura 5.19: Comportamento da frequência elétrica com a aplicação da carga no ensaio
experimental mostrado na Figura 5.18. (a) Antes da conexão da carga. (b) Depois da conexão
da carga.
5.3 Conclusões
O desenvolvimento da bancada para estudos com geração assíncrona e a utilização da
105
mesma, possibilitou que resultados experimentais fossem obtidos para algumas condições
operativas do gerador de indução.
Embora os valores de tensão e corrente obtidos experimentalmente e via simulação
apresentem uma pequena variação na amplitude, os resultados práticos mostram que a
autoexcitação existe para as condições de PRAE e velocidade mecânica do gerador definidas
pela
, indicando que tais superfícies e suas curvas de nível podem ser utilizadas no
dimensionamento do SEIG em torno das regiões operativas da máquina.
Pode-se observar que os resultados apresentados nos Capítulos 3 e 4 sobre a frequência
elétrica da tensão gerada são pertinentes, pois a frequência elétrica permanece inalterada
quando a PRAE dimensionada a partir da condição de
e
é aplicada ao
SEIG mesmo quando uma sobrecarga maior que
é aplicada aos terminais do gerador.
106
Capítulo 6
Conclusões
Este trabalho apresentou uma análise do processo e da existência de autoexcitação em
torno de regiões operativas do gerador de indução de tal forma a possibilitar que o projeto de
sistemas de geração que operam de forma isolada e que utilizam geradores de indução (GI)
seja facilitado.
A modelagem do GI em pu, da carga e da potência reativa de autoexcitação (PRAE) em
termos de potência, tendo como base a potência nominal do próprio gerador, facilita a análise
das condições de existência de autoexcitação, pois as grandezas envolvidas ficam expressas
em termos habitualmente usados em estudos de sistemas elétricos. Além disso, neste trabalho,
a carga é apresentada com componentes ativas e reativas, o que possibilita visualizar o
processo de autoexcitação e o comportamento da mesma, diante de cargas que contém tanto
componentes ativos quanto reativos.
A autoexcitação é provocada pela instabilidade do equilíbrio = 0, cuja análise
possibilitou concluir que a observação das raízes do polinômio do determinante da matriz
impedância do sistema é suficiente para verificar as condições de existência de autoexcitação.
Logo, se ao menos uma raiz apresentar parte real positiva, o equilíbrio = 0 torna-se instável,
o que caracteriza a autoexcitação. A análise da estabilidade do equilíbrio = 0 permitiu
também mostrar que a autoexcitação ocorre somente se existir magnetismo residual no rotor
do gerador ou tensão inicial nos capacitores de autoexcitação.
Quando o gerador é operado somente com carga resistiva e sem os capacitores de
autoexcitação, as raízes do polinômio característico da matriz impedância movimentam-se da
esquerda para a direita no plano complexo quando ocorre o aumento da velocidade mecânica
do gerador, porém nunca atingem o lado direito do plano complexo, o que indica que não
ocorre autoexcitação. Quanto maior o valor da indutância de magnetização inicial, mais as
raízes do determinante da matriz impedância se aproximam do eixo imaginário do plano
complexo com o aumento da velocidade. Isso mostra que a indutância de magnetização inicial
é fundamental no processo de autoexcitação.
Dependendo do valor da PRAE, da carga conectada nos terminais do gerador e da
velocidade mecânica, uma das raízes do polinômio (complexa conjugada) tende a
movimentar-se para o lado direito do plano complexo, tornando o equilíbrio = 0 instável e
107
108
caracterizando a autoexcitação. A determinação destas condições é feita numericamente, uma
vez que soluções analíticas são possíveis de ser obtidas apenas para o caso em que a carga é
puramente ativa.
A autoexcitação do gerador de indução ocorre em regiões denominadas regiões de
existência de autoexcitação, as quais dependem da velocidade do rotor, da carga e da PRAE.
As regiões de existência de autoexcitação podem existir, por exemplo, para valores de
potência de carga, PRAE e velocidade mecânica que do ponto de vista operativo nunca são
atingidas (elevadas sobrecargas, PRAEs e velocidades mecânicas) e que fogem, portanto, das
condições operativas reais do SEIG. Em função disso, a autoexcitação foi analisada em torno
das condições reais de operação do gerador de indução, definidas pela região operativa RO,
constituindo uma das importantes contribuições deste trabalho pelo seu impacto no projeto do
SEIG.
A RO foi definida pelos limites mínimos e máximos de velocidade mecânica
compreendida entre 0.9pu e 1.1pu e pela potência máxima da carga conectada ao gerador,
sendo adotado o valor máximo de sobrecarga
= 1.1
( = 1.1) admitida pelo
mesmo. A definição da RO propiciou a análise da autoexcitação em torno das condições que
um SEIG opera do ponto de vista prático. Foi verificado que em torno da RO, existe um valor
de PRAE que promove a autoexcitação e que garante a autoexcitação para todas as condições
operativas definidas pela RO. Desta forma existe uma
que promove a autoexcitação
e cujo valor fica mais próximo do valor da potência nominal do gerador. Tal PRAE é obtida
dimensionando a mesma para a menor velocidade operativa e para a maior carga com o menor
FP.
A PRAE calculada para esta condição faz também com que o valor da frequência
elétrica da tensão gerada situe-se dentro da região operativa. Se o gerador em estudo neste
trabalho e cujos parâmetros podem ser verificados nos Apêndices A e B, operar com uma
velocidade acima de 1.0pu e abaixo de 1.1pu, a frequência elétrica da tensão gerada fica
próxima a 1.0pu com variações menores que 4.2% para qualquer condição de carga e FP.
A análise das condições de existência de autoexcitação em torno da região operativa
possibilitou que superfícies de projeto
fossem obtidas. Tais superfícies podem ser obtidas a
partir do conhecimento dos parâmetros da máquina em análise, da matriz impedância do
SEIG e da aplicação do algoritmo desenvolvido neste trabalho. Essas superfícies e suas curvas
de nível, quando traçadas em torno dos limites de velocidade mecânica admitidos pela RO e
para a
, possibilitam o dimensionamento da PRAE de tal forma a promover a
existência da autoexcitação para as demais condições de carga, FP e velocidade mecânica,
sendo úteis no dimensionamento do SEIG.
A
foi utilizada também para analisar a influência que a variação das resistências de
estator e rotor devido à variação de temperatura, provocam nas condições de existência de
autoexcitação em torno da RO. Foi observado que tais variações apresentam influência pouco
significativa e podem ser desprezadas no projeto do SEIG.
109
Embora a análise das raízes do determinante da matriz impedância do sistema seja
suficiente para predizer a existência ou não da autoexcitação em torno da RO e permitiram
que a
fosse obtida, as condições dinâmicas de corrente e tensão fornecidas pelo gerador
não podem ser calculadas a partir desta análise.
O modelo dinâmico do SEIG foi apresentado de tal forma que a não linearidade da
indutância de magnetização, obtida experimentalmente, fosse levada em consideração. Este
modelo permitiu analisar a dinâmica do processo de autoexcitação sendo possível verificar o
comportamento temporal da corrente e da indutância de magnetização quando o processo de
autoexcitação ocorre. Com as simulações realizadas a partir do modelo dinâmico, foi possível
verificar que a autoexcitação é garantida para todas as condições de potência elétrica da carga
que são envolvidas pela RO, portanto, a
e suas curvas de nível podem ser utilizadas no
dimensionamento do SEIG. Mesmo para as condições transitórias de velocidade que ocorrem
na prática durante a aplicação da carga, a autoexcitação é mantida se a velocidade voltar para
a faixa compreendida pela RO.
As simulações permitiram verificar também que se o SEIG encontra-se autoexcitado, o
mesmo admite uma sobrecarga maior que a potência máxima operativa de projeto. Isso se
deve ao fato de que a curva de magnetização apresenta um valor máximo, superior ao valor
inicial correspondente a corrente de magnetização nula. Como a característica da curva de
magnetização é intrínseca a cada máquina e depende dos aspectos construtivos da mesma,
esta capacidade de sobrecarga suportada pelo SEIG sem a perda da autoexcitação depende de
cada máquina. Logo, geradores que apresentam curvas de magnetização com
mais
elevados suportam maiores sobrecargas.
Os valores da frequência elétrica da tensão gerada foram analisados com o auxílio do
modelo dinâmico. Para a máquina utilizada neste trabalho, as variações de frequência elétrica
da tensão gerada são menores que 3% quando o FP da carga encontra-se acima de 0.6 e a
velocidade mecânica em 1.05pu, com a PRAE projetada a partir da potência operativa
máxima e da menor velocidade mecânica. As simulações mostram que embora esta PRAE
mantenha as variações da frequência elétrica da tensão gerada em condições aceitáveis para
sistemas operando de forma isolada e que esta PRAE propicia e mantém a autoexcitação para
todas as condições de carga aplicada ao GI, tal PRAE faz com que a corrente de estator do
gerador apresente valores acima dos valores nominais quando a potência da carga aplicada ao
SEIG é nula ou com
= 1.0. Na prática como o GI parte sem carga, uma PRAE mínima
pode ser aplicada a fim de propiciar a autoexcitação e a manutenção da mesma pode ser
obtida com a aplicação de mais PRAE a partir do momento que o SEIG começa a admitir
carga elétrica em seus terminais.
O desenvolvimento da bancada para estudos com geração assíncrona e a utilização da
mesma, possibilitou verificar de forma experimental todas as análises de existência de
autoexcitação desenvolvidas no trabalho. Os resultados experimentais obtidos mostram que as
análises desenvolvidas sobre a existência de autoexcitação, assim como os resultados obtidos
da simulação do modelo dinâmico, são concordantes, seja do ponto de vista de valores de
110
potência de autoexcitação e velocidade mecânica, quanto das comparações dinâmicas do
modelo.
A concepção da bancada permite que vários tipos de ensaio com o gerador de indução
possam ser realizados, dentre eles a conexão de cargas desequilibradas, aplicação de elevados
valores de potência reativa de autoexcitação, variação da velocidade em tempos prédeterminados e a conexão do gerador em paralelo com a rede da concessionária. Isso faz com
que a mesma possa ser utilizada em trabalhos futuros e alguns são destacados a seguir.
6.1 Sugestão de Trabalhos Futuros
Como sugestão de trabalhos futuros, os seguintes assuntos podem ser abordados:
Análise e estudo do ciclo limite, que é a condição de operação do SEIG, sob o ponto
de vista da amplitude da oscilação. Isso possibilita a análise da amplitude da tensão
gerada, o que permite determinar as condições operativas dinâmicas de tensão e
corrente para os pontos de equilíbrio do ciclo limite em que o SEIG opera.
Obter uma função analítica da superfície de projeto que permita o dimensionamento
da PRAE a ser conectada ao SEIG. Tal função pode ter como variáveis a potência da
carga e seu FP e a velocidade mecânica do gerador. Isso possibilita que a PRAE seja
encontrada de uma forma mais prática do ponto de vista de projeto.
Associar a função de projeto com o estudo do ciclo limite de tal forma a possibilitar
o cálculo da tensão e da corrente para cada condição operativa do gerador de
indução, impedindo que valores indesejáveis de corrente sejam obtidos devido a
aplicação da PRAE.
Analisar o processo de autoexcitação em condições de carga e potência reativa de
autoexcitação desequilibradas.
Analisar as condições dinâmicas de existência de autoexcitação incluindo o modelo
matemático da máquina primária e de sua regulação de velocidade.
Referências Bibliográficas
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 5383-1: Máquinas Elétricas
Girantes Parte 1- Motores de indução trifásicos ensaios. Rio de Janeiro, 2002. 62p.
Akhmatov, V. (2003). Analisys of Dinamic Behaviour of Electric Power Systems whit Large
Amount of Wind Power, Tese, Technical University of Denmark.
AL-Bahrani, A.H. and Malik, N.H. (1990). Steady State Analysis and Performance
Characteristics of a Threee-Phase Induction Generator Self-Excited With a Single
Capacitor, IEEE Transactions on Energy Conversion 5 (4): 725-732.
Bansal, R.C. (2005). Three-Phase Self-Excited Induction Generators: An Overview, IEEE
Transactions on Energy Conversion 20(2): 292-299.
Betzek, F. (2011). Projeto e Execução de uma Bancada Didática para Estudos com Geração
Assíncrona, Trabalho de Conclusão de Curso, Universidade Tecnológica Federal do
Paraná, Medianeira, Brasil.
Bhim, E. (1981). Contribuição ao Estudo do Gerador de Indução Auto-Excitado, Dissertação
de Mestrado, Universidade Estadual de Campinas, São Paulo, Brasil.
Bodson, M. and Kiselychnyk, O. (2010a). Analityc Conditions for Spontaneous SelfExcitations in Induction Generators, American Control Conference, Baltimore, MD,
USA, pp. 2527-2532.
Bodson, M. and Kiselychnyk, O. (2010b). On the Triggering of Self-Excitation in Induction
Generators, International Symposium on Power Electronics, Electrical Drivers,
Automation and Motion, Pisa, Italy, pp. 866-871.
Bodson, M. and Kiselychnyk, O. (2012). Analysis of Triggered Self-Excitation in Induction
Generators and Experimental Validation, IEEE Transactions on Energy Conversion
27(2): 238-249.
Chan, T.F and Lai, L.L. (2001). Steady-State and Performance of a Stand-Alone Three-Phase
Induction Generator With Asymmetrically Connected Load Impedances and Excitation
Capacitances, IEEE Transactions on Energy Conversion 16(4): 327-333.
Chan, T.F. (1999). Performance Analysis of a Three-phase Induction Generator Self-excited
with a Single Capacitance, IEEE Transactions on Energy Conversion 14(4): 894-900.
Chapman, S. J. (ed.4.) (2005). Electric Machinery Fundamentals, McGraw-Hill, Inc, New
York.
Del Toro, V. (1994). Fundamentos de Máquinas Elétricas, LTC, Rio de Janeiro.
111
112
Elder, J.M., Boys, J.T. and Woodward, J.L. (1983). The process of self excitation in induction
generators, IEE Proceedings. 130(2): 103-108.
Fitzgerald, A. E., Kingsley, C. and Kusko, A. (ed.6.) (2006). Máquinas Elétricas. McGrawHil, Inc, New York.
Frank, E. (1946). On the zeros of polynomials whit complex coefficients, Bull. Amer. Math.
Soc., 52(2): 144-147.
Grantham, C., Sutanto, D. and Mismail, B. (1989). Steady-state and transient analysis of selfexcited induction generators, IEE Proceedings. 136(2): 61-68.
Grantham, C. and Seyoum, D. (2008). The Dynamic Characteristics of an Isolated SelfExcited Induction Generator Driven by a Wind Turbine, International Conference on
Electrical Machines and Systems, Wuhan, China, pp. 2351-2356.
Haque, M.H. (2009). A Novel Method of Evaluating Performance Characteristics of a SelfExcited Induction Generator, IEEE Transactions on Energy Conversion 24(2): 358365.
Haque, M.H. (2010). Analysis of a Self-Excited Induction Generator with P-Q Load Model,
IEEE Transactions on Energy Conversion 25(1): 265-267.
Idjdarene, K., Rekioua, D., Rekioua, T. and Tounzi, A. (2010). Performance of an Isolated
Induction Generator Under Unbalanced Loads, IEEE Transactions on Energy
Conversion 25(2): 303-311.
Kalemen, L., Rafajdus, P., Sekerák, P. and Hrabobvobá, V. (2012). A Novel Method of
Magnetizing Inductance Investigation of Self-Excited Induction Generator, IEEE
Transactions on Magnetics 48(4): 1657-1660.
Krause, C.P., Wasynexuk, O. and Sudhoff, D.S. (ed.2.) (2002). Analysis of electric machinery
and Drive Systems, IEEe Press, Piscataway, New Jersey.
Kumar, G.S. and Kishore, A. (2006). A Generalized Dynamic Modeling and Analysis of SefExcited Induction Generator usin State-Space Approach with ANN-Model of
Magnetizant Inducatance, International Conference on Industrial Technology, Mumbai,
India, pp. 2698-2703.
Lara-Anaya, O., Jeikins, N., Ekanayake, J., Phill, C. and Huges, M. (2009). Wind Energy
Generation Modeling and Control, John Wiley & Sons, England.
Levi, E. (1995). A Unified Approach to Main Flux Saturation Modelling in D-Q Axis Models
of Induction Machines, IEEE Transactions on Energy Conversion 10(3): 455-461.
Marra, E.G. and Pomilio, J.A. (2000). Sistemas de Geração Baseados em Gerador de Indução
Operando com Tensão Regulada e Frequência Constante, SBA - Controle e Automação,
11(1): 29-36.
Mayer, G. and Reginatto, R. (2012a). Caracterização da Autoexcitação de Geradores de
Indução em Grandezas Usualmente Utilizadas em Sistemas Elétricos de Potência e
113
Aplicação em Sistemas Isolados de Geração, Simpósio Brasileiro de Sistemas Elétricos,
Goiânia, Brasil, pp. 1-6
Mayer, G. and Reginatto, R. (2012b). Condições de Existência de Autoexcitação em
Geradores de Indução Conforme suas Condições Operativas, XII Symposium of
Specialists in Electric Operational and Expantion Planning, Rio de Janeiro, Brasil, pp.
1-10.
Mayer, G. (2012). Quadros de Comando e Força de uma Bancada para Estudos com Geração
Assíncrona, Relatório técnico, Universidade Tecnológica Federal do Paraná,
Medianeira. Brasil.
Miyadaira, A.N. (2012). Microcontroladores ARM Cortex-M3 (Família LPC175x/6x da
NXP): Programação em linguagem C., Teló & Miyadaira Editora Ltda, Cascavel,
Brasil.
Murthy, S.S., Malik, O.P and Tandon, A.K. (1982). Analysis of self-excited induction
generators, IEE Proceedings. 129(6): 260-265.
Neam, M.M., El-Sousy, F.F.M., Ghazy, M.A. and Abdo-Adma, M.A. (2007). The Dynamic
Performance of an Isolated Self-Excited Induction Generator Driven by a VariableSpeed Wind Turbine, International Conference on Clean Electrical Power, Capri, Italy,
pp. 536-543.
Olorunfemi, O. (1995). Dynamics ans Systems Bifurcation in Autonomous Induction
Generator, IEEE Transactions on Industry Applications 31(4): 918-924.
Patel, R.M. (ed.2.) (2006). Wind and Solar Power Systems: Design, Analisys and Operation.
Taylor & Francis Group, New York, USA.
Pereira, D. d. O. F. (2007). Análise da Estabilidade de Sistemas de Geração Eólica com
Aerogeradores de Indução com Rotor de Gaiola, Dissertação de Mestrado,
Universidade Federal do Rio Grande do Sul, Porto Alegre, Brasil.
PROINFA (2012). Programa de Incentivo as fontes alternativas de energia. Acesso em
março/2012.
Disponível em: http://www.mme.gov.br/programas/proinfa/
Reginatto, R. (2006). Modelagem do Gerador de Indução. Technical report, Universidade
Federal do Rio Grande do Sul, Porto Alegre, Brasil.
Rocha, M. (2005). Comportamento Dinâmico do Gerador de Indução com Dupla
Alimentação em Sistema de Geração Eólica, Dissertação de Mestrado, Universidade
Federal do Rio de Janeiro, Rio de Janeiro, Brasil.
Rodrigues, J.M., Fernandez, J.L., Beato, D., Uturbe, R., Usaola, J., Ledesma, P. and Wilhelm,
J.R. (2002). Incidence on Power System Dynamics of High Penetration of Fixed Speed
and Doubly Fed Wind Energy Systems: Study of the Spanish Cass, IEEE Transactions
on Power Systems 17(4): 1089-1095.
114
Scherer, L.G., Camargo, F.R., Pinheiro, H. and Rech, C. (2011). Advances in the Modeling
and Control of Micro Hydro Power Stations with Induction Generators. Energy
Conversion Congress and Exposition , Santa Maria, Brasil, pp. 997-1004.
Seyoum, D. (2003). The Dynamic Analisys and Control of a Self-Excited Inductions
Generator Driven by a Wind Turbine, Tese, University of New South Wales, Sydney,
Austrália.
Singh, B., Singh, M. and Tandon, A.K. (2010). Transient Performance of Series-Compensated
Three-Phase Self-Excited Induction Generator Feeding Dynamic Loads, IEEE
Transactions on Industry Applications 46 (4): 1271-1280.
Smith, N.P.A. (January de 1996). Induction Generators for Stand-Alone Micro-Hydro
Systems, Power Electronics, Drives and Energy Systems for Industrial Growth, Delhi,
Índia, pp. 669-673.
Stankovic, A.V., Benedict, E., Vinod, J. and Lipo, A.T. (2003). A Novel Method for
Measuring Inductions Machine Magnetizing Inductance, IEEE Transactions on Industry
Applications 39 (5): 1257-1263.
Tandon, A.K., Murthy, S.S. and Berg, G.J. (1984). Steaty State Analysis of Capacitor SelfExcited Induction Generators, IEEE Transactions on Power Apparatus and Systems 103
(3): 612-618.
Tarnowski, G.C. (2006). Metodologia de Regulação da Potência Ativa para Operação de
Sistemas de Geração Eólica com Aerogerador de Velocidade Variável, Dissertação de
Mestrado, Universidade Federal do Rio Grande do Sul, Porto Alegre, Brasil.
Trap, J. (2008). Gerador de Indução Isolado com Tensão e Frequência Reguladas por
Conversor Matricial Esparso, Dissertação de Mestrado, Universidade Federal de Santa
Maria, Santa Maria, Brasil.
Wang, L. and Kuo, S.C. (2002). Steady State Performance of a Self-Excited Induction
Generator under Unbalanced Load, Power Engineering Society Winter Meeting, New
York, USA, pp. 408-412.
Wang, Y.J. and Huang, S.Y. (2004). Analysis of a self-excited induction generator supplying
unbalanced loads, International Conference on Power System Technology, Singapore,
pp. 1457-1462.
Zanchettin, M. (2012). Análise da Inserção de Geração Eólica com Aerogeradores de
Indução. Dissertação de Mestrado, Universidade Estadual do Oeste do Paraná, Foz do
Iguaçu, Brasil.
Apêndice A
Ensaios Realizados para a Obtenção dos
Parâmetros do Gerador de Indução
1.0 Introdução
A máquina utilizada como gerador consiste em um motor de indução com rotor em
gaiola de esquilo de barras simples, categoria “D”. O material do rotor é de cobre, fato que
caracteriza uma resistência de rotor menor quando comparado a máquinas de indução com
rotor em alumínio. O motor é de alto rendimento e segundo o fabricante, este melhor
desempenho é obtido com a aplicação de materiais de maior pureza, no caso do cobre que
constituí os enrolamentos do estator e barras do rotor e melhores características magnéticas
das chapas que formam o núcleo do estator. Além de tais melhorias do ponto de vista dos
materiais empregados, a carcaça do gerador é de alumínio, o que possibilita maior
desempenho no resfriamento e dissipação do calor.
A potência do gerador é de 7.5kW, IV polos e pode ser acionado em três níveis de
tensão como pode ser observado na Figura 1.1A.
Figura 1.1A: Características construtivas e elétricas do Gerador de Indução.
115
116
O monitoramento da velocidade da máquina pode ser obtido com o auxílio de um
encoder incremental TTL de 1024 pulsos acoplado diretamente no eixo da máquina. A fim de
se obter valores reais da temperatura interna, o equipamento possui três sensores de
temperatura do tipo PT100 a dois fios alojados no estator conforme mostra a Figura 1.1A. O
equipamento possui grau de isolação F(155C) e em condições nominais trabalha á uma
temperatura de 80C.
Os parâmetros da máquina de indução são fundamentais para a modelagem matemática
do equipamento. Nesta modelagem os parâmetros: Resistência de estator e rotor, reatâncias de
dispersão de estator e rotor e reatância de magnetização devem ser conhecidos. Tais
parâmetros são obtidos através de alguns ensaios realizados na máquina e do equacionamento
do circuito do gerador em regime permanente. Alguns destes ensaios são normatizados pela
NBR 5383-1 (2002), Máquinas Elétricas Girantes Parte 1: Motores de indução trifásicos, que
é aplicada nos ensaios de motores de indução trifásicos e podem ser utilizados na obtenção
dos parâmetros da máquina independente do modo de funcionamento desta, ou seja, modo
motor ou modo gerador. Para a obtenção dos parâmetros do gerador, os seguintes ensaios
realizados são suficientes:
Ensaio de resistência de estator
Ensaio a vazio à velocidade síncrona
Ensaio com rotor bloqueado
Ensaio à velocidade síncrona
A Figura 1.2A mostra o circuito equivalente por fase do gerador de indução em regime
permanente.
Figura 1.2A: Circuito equivalente do Gerador de Indução em regime permanente.
Nesta figura,
Resistência de estator
Reatância de dispersão do estator
117
Resistência de rotor
Reatância de dispersão do rotor
Reatância de magnetização
Resistência que representa as perdas no núcleo do estator (ferro)
Corrente total do ramo magnetizante
Corrente de magnetização
Corrente das perdas no núcleo
Corrente do estator
Corrente do rotor
Tensão aplicada ao estator
Escorregamento.
2.0 Resistência de Estator
Um dos métodos apresentados na NBR 5383-1 para a medição da resistência de estator
é o método da queda de tensão ou método DC. Este método é utilizado para medições de
baixas resistências e consiste na aplicação direta de corrente contínua nos enrolamentos do
estator da máquina com o auxílio de uma fonte DC.
Segundo Chapman (2005), a resistência de estator é independente da resistência de rotor
( ) e das reatâncias de dispersão (
e
), logo a corrente contínua que circula no
enrolamento não produz nenhuma tensão induzida no rotor e não existe, portanto, nenhum
fluxo resultante de corrente no rotor, o que possibilita a medição direta da resistência de
estator.
A NBR 5383-1 menciona que a corrente a ser aplicada no ensaio não deve ser superior a
15% da corrente nominal a fim de evitar o superaquecimento do estator, porém, Chapman
(2005) afirma que melhores resultados são obtidos quando a corrente contínua aplicada no
ensaio chega a valores mais próximos da corrente nominal. A fim de obter a menor corrente
nominal possível nos enrolamentos do estator, foi utilizado o fechamento dos terminais do
estator em estrela série. Quando ligado desta forma, o gerador pode operar com uma corrente
nominal de 7.58A.
A Figura 1.3A mostra o esquema de ligação dos terminais do gerador e a configuração
final dos equipamentos utilizados neste ensaio. Nesta figura, A
e V representam
respectivamente uma fonte de corrente contínua e um voltímetro.
118
Figura 1.3A: Configuração da ligação dos enrolamentos do gerador e ligação dos
equipamentos utilizados no ensaio DC.
Chapman (2005) e Seyoum (2003), mencionam que a resistência de estator altera-se de
forma significativa com o aumento da temperatura, logo o ensaio pode ser realizado com a
máquina em temperatura nominal de operação ou a resistência calculada a uma temperatura
menor que a temperatura de operação pode ser corrigida através da equação seguinte
apresentada na NBR 5383-1.
(
(
=
+
+
)
)
A(01)
Onde:
Resistência de estator corrigida para a temperatura nominal de operação
Resistência de estator a temperatura não corrigida
Temperatura durante o ensaio
Temperatura a ser corrigida
Constante (234,5 para o cobre eletrolítico com 100% de condutividade).
Durante o ensaio, as medições de temperatura foram obtidas através do sistema de
aquisição de dados cDAQ da National Instruments e dos sensores de temperatura
mencionados anteriormente. Segundo a NBR 5383-1 (2002), o ensaio deve ser repetido para
todas as fases. O Quadro 1.1 mostra os valores de tensão e corrente obtidos nas medições.
O cálculo da resistência de estator pode ser obtido através da equação A(02).
é
é
=
é
=
14,444
= 2,886Ω
5,006
A(02)
119
Como existem quatro enrolamentos ligados em série, (ver Figura 1.3A), a resistência de
estator a uma temperatura de 25C resulta em,
=
é
4
=
2,886
= 0,721Ω.
4
A(03)
Quadro 1.1: Valores obtidos no ensaio DC
Ensaio - Resistência de Estator - Configuração dos enrolamento -Estrela Série
Temp. Inicial - Graus
Fases
24,92
VDC (V)
Temp. Final - Graus
I (A)
25,19
Req
R-S
R-S
R-S
R-T
R-T
R-T
S-T
S-T
S-T
14,45
14,58
14,5
14,39
14,45
14,58
14,32
14,38
14,35
5,01
5,03
5,00
5,02
5,00
5,00
5,00
4,99
5,00
2,884
2,899
2,900
2,867
2,890
2,916
2,864
2,882
2,870
VDC (V) Média
I (A) Média
Req Média
14,444
5,006
2,886
3.0 Ensaio a Vazio
O ensaio a vazio é geralmente utilizado para a obtenção da resistência que representa as
perdas no núcleo do estator ( ), perdas rotacionais ocasionadas por atrito e ventilação e
auxilia na determinação das reatâncias de magnetização e de dispersão do estator e do rotor.
Neste ensaio, a máquina é acionada com tensões trifásicas equilibradas a frequência nominal.
As seções 3.1 e 3.2 mostram dois ensaios a vazio, o primeiro para determinar as perdas por
atrito e ventilação e o segundo para auxiliar na determinação dos demais parâmetros do
gerador.
3.1
Ensaio a Vazio para a Obtenção das Perdas por Atrito e Ventilação
Segundo Del Toro (1994), quando a máquina de indução opera a vazio e com tensão
nominal, esta absorve potência ativa necessária para alimentar as perdas no cobre do estator,
as perdas por atrito e ventilação e as perdas no núcleo do estator. A equação
120
=
+
+
A(04)
mostra tal balanço de potências, onde:
Potência ativa medida no ensaio a vazio
Perdas no cobre do estator
Perdas por atrito e ventilação
Perdas no núcleo do estator.
A NBR 5383-1 mostra que as perdas por atrito e ventilação podem ser obtidas medindose os valores de potência, corrente e tensão (a frequência nominal), variando-se a tensão do
valor desde 125% da tensão nominal até o valor de tensão mínimo que ocasiona o aumento da
corrente. Quando isso ocorre, a velocidade do rotor começa a ficar muito abaixo da
velocidade síncrona e a tensão aplicada não é mais capaz de suprir as perdas rotacionais e as
perdas no cobre e no ferro.
Como a tensão inicial a ser aplicada no ensaio é muito elevada, Del Toro (1994)
menciona que neste ensaio a tensão inicial a ser aplicada pode ser a tensão nominal.
A Figura 1.4A mostra o esquema de ligação do gerador de indução (GI) e dos demais
dispositivos utilizados neste ensaio.
Figura 1.4A: Esquema de ligação do Gerador de Indução e de demais equipamentos para o
ensaio a vazio.
Na figura 1.4A, “P1” e “P2” representam dois wattímetros utilizados para a medição de
potência trifásica pelo método dos dois wattímetros. “A” e “V” representam amperímetros e
voltímetros utilizados para as medições de corrente de linha e tensão de fase. O Quadro 1.2
mostra os resultados obtidos neste ensaio. A corrente IL é obtida da média das correntes de
linha e a potência trifásica perdida no cobre do estator P pode ser calculada por,
121
=3
onde
A(05)
= 0.721Ω (25).
Quadro 1.2: Levantamento das perdas por Atrito e Ventilação.
Ensaio a vazio - Perdas por Atrito , Ventilação e Ferro - Ensaio trifásico
Tensão Fase (V)
Tensão Linha (V)
calculado
IL (A)
221
210
205
200
195
190
185
180
175
170
165
160
155
150
145
140
135
130
125
120
115
110
105
100
95
90
85
80
75
70
65
60
55
50
48
46
45
44
382,78
363,73
355,07
346,41
337,75
329,09
320,43
311,77
303,11
294,45
285,79
277,13
268,47
259,81
251,15
242,49
233,83
225,17
216,51
207,85
199,19
190,53
181,87
173,21
164,54
155,88
147,22
138,56
129,90
121,24
112,58
103,92
95,26
86,60
83,14
79,67
77,94
76,21
7,13
6,16
5,79
5,5
5,25
4,81
4,59
4,4
4,16
3,98
3,78
3,64
3,47
3,34
3,21
3,07
2,94
2,83
2,73
2,56
2,45
2,4
2,31
2,22
2,11
2,03
1,92
1,82
1,75
1,63
1,58
1,49
1,42
1,39
1,32
1,32
1,29
1,35
Temp. Inicial. (C °)
Temp. Final (C °)
RPM Inicial
RPM Final
Pentrada (w) P cu s (w) calculado
409
360
349
337
321
310
298
298
281
271
264
253
247
238
232
226
218
216
209
203
197
191
184
180
174
169
164
161
157
152
147
143
142
137
135
134
133
135
109,96
82,08
72,51
65,43
59,62
50,04
45,57
41,88
37,43
34,26
30,91
28,66
26,04
24,13
22,29
20,39
18,70
17,32
16,12
14,18
12,98
12,46
11,54
10,66
9,63
8,91
7,97
7,16
6,62
5,75
5,40
4,80
4,36
4,18
3,77
3,77
3,60
3,94
23,4
26,8
1797
1791
A NBR 5383-1 define que a extrapolação da curva da potência de entrada (
)
122
diminuída da potência das perdas no cobre do estator (
) em função da variação da tensão
aplicada, resulta nas perdas por atrito e ventilação. O valor de
aproxima-se de 104W e
pode ser verificada na Figura 1.5A.
300
280
260
Potência Ativa(W)
240
220
200
180
160
140
Dados Experimentais
Polinômio 2 Ordem
Extrapolação da Curva
120
100
0
50
100
150
200
250
Tensão de Linha(V)
300
350
Figura 1.5A: Perdas por atrito e ventilação obtidos a partir do ensaio a vazio.
3.2
Ensaio a Vazio à Velocidade Síncrona
O levantamento do valor da reatância de magnetização
é encontrado parcialmente
no ensaio a vazio à velocidade síncrona. Quando operado a vazio, o rotor da máquina gira
com velocidade próxima a velocidade síncrona, logo o escorregamento é praticamente nulo.
Chapman (2005) e Del Toro (1994) simplificam o circuito equivalente da máquina de indução
considerando o lado direito do circuito da Figura 1.2A em aberto ( /0 → ∞). A Figura 1.6A
mostra o circuito equivalente para esta consideração.
Figura 1.6A: Circuito equivalente do gerador de indução no ensaio a vazio e à velocidade
síncrona.
123
Embora esta simplificação seja válida, Seyoum (2003) menciona que resultados mais
satisfatórios são obtidos se de fato o rotor do gerador for acionado por uma máquina primária
até que atinja a velocidade síncrona, fazendo com que realmente os parâmetros do rotor sejam
desacoplados do resto do circuito.
A fim de que a velocidade do gerador de indução atingisse à velocidade síncrona, o eixo
do mesmo foi acoplado diretamente ao eixo de outra máquina de indução de mesmas
características elétricas e mecânicas do gerador e denominada por máquina primária MP. Com
o auxílio de um inversor de frequência, parametrizado com controle vetorial de fluxo, a MP
foi acionada a 1800RPM.
A Figura 1.7A mostra os esquemas de ligação elétrica dos dispositivos de medição para
este ensaio e o esquema do acoplamento mecânico entre o GI e a MP. O Quadro 1.3 mostra os
resultados obtidos nas medições.
Quadro 1.3: Medições obtidas no ensaio a vazio e á velocidade síncrona.
Ensaio a vazio á velocidade síncrona
Temp. Inicial e Final
42,8 - 43C °
V vazio sinc.(V) Ivazio sinc.(A) Pvazio sinc. (W) Velocidade (RPM)
221
7,68
400
1800
O valor de tensão apresentado no Quadro 1.3 é resultado da média das tensões de fase e
a corrente é a média das correntes de linha nas três fases. A potência denominada por
é a potência trifásica obtida no ensaio.
Figura 1.7A: Configuração dos equipamentos no ensaio a vazio e à velocidade síncrona.
124
Neste ensaio, como a frequência é mantida constante, o ramo paralelo da Figura 1.6A
composto por
e
pode ser transformado em uma impedância série equivalente e resulta
em
∥
⇒
=
+
A(06)
onde,
=
+
A(07)
=
+
.
O circuito equivalente para este ensaio pode ser verificado na Figura 1.8A.
Figura 1.8A: Circuito equivalente para o ensaio a vazio à velocidade síncrona.
Se os parâmetros
e
forem novamente convertidos para um ramo série
equivalentes, podemos escrever as equações A(07) na forma
=
+
A(08)
=
+
.
A resistência, a reatância e a impedância total do circuito podem ser escritas por
125
=
+
=
|
+
|=
,
A(09)
,
+
A(10)
.
A(11)
O fator de potência FP do circuito da Figura 1.8A pode ser calculado por,
=
−
=
3.
400 − 104
= 0,0581 .
3.221.7,68
A(12)
A impedância total do circuito da Figura 1.8A pode ser obtida através da equação
A(13).
|
|=
=
221
⇒|
7,68
| = 28.78Ω
Com os dados obtidos de A(12) e A(13), o valor de
o auxílio da equação A(14).
=
.
⇒
A(13)
pode ser encontrado com
= 1,673Ω
A(14)
A correção da resistência a vazio para a temperatura de 25C (ensaio realizado a
aproximadamente 43C) resulta em
= 1,565Ω. Com o auxílio da equação A(09),
resulta em
=
−
⇒
= 0,844Ω.
Com os valores obtidos em A(13) e A(14), a reatância indutiva (corrigida para 25C)
pode ser calculada por
=
Da equação A(10)
−
=
28,78 − 1,565 = 28,74Ω.
A(15)
126
=
−
.
Ou seja, a reatância de magnetização fica em função de
ensaio com rotor bloqueado.
A(16)
que será obtido a partir do
4.0 Ensaio com Rotor Bloqueado
O ensaio com rotor bloqueado (curto-circuito) auxilia na determinação das reatâncias de
dispersão e resistência do rotor. Esse teste consiste no travamento mecânico do eixo do rotor e
na aplicação de tensão trifásica equilibrada na máquina até que a corrente de estator atinja o
valor nominal. Com o rotor bloqueado, o escorregamento torna-se igual a 1 e o circuito
equivalente do gerador nesta condição pode ser observado na Figura 1.9A.
Na Figura 1.9A,
e
tensão aplicada ao estator da máquina.
representam respectivamente a corrente e a
Segundo Chapman (2005), este ensaio pode apresentar um problema, pois quando
operando em condições normais, a frequência que o estator fica submetido é a mesma que a
da rede de alimentação e como normalmente o escorregamento é baixo, a frequência da
corrente induzida no rotor também é baixa (1 a 3 Hz). Portanto, neste ensaio, a frequência que
o rotor fica submetido é igual à frequência aplicada no estator. Em motores de classe B e C, a
resistência do rotor é projetada para ser uma função da frequência do rotor, logo, na partida a
resistência é alta (rotor bloqueado) e diminui com o aumento da velocidade do rotor. Uma das
alternativas para este ensaio e apresentadas por Chapman (2005), é realizar o ensaio com uma
frequência igual ou menor a 25% da frequência nominal. Chapman (2005) menciona ainda
que tal metodologia pode ser adotada para máquinas do tipo A e D.
Figura 1.9A: Circuito equivalente para o GI com rotor bloqueado.
Fitzgerald at al. (2006) afirma que motores da classe A e D e de potência menor que
25HP, podem ser ensaiados com frequência nominal, porém, é imprescindível que durante o
127
ensaio a corrente alcance o valor mais próximo possível da corrente nominal, pois as
reatâncias de dispersão são afetadas significativamente pela saturação do estator. Como a
máquina em teste é da classe D e sua potência é de 7.5kW, o ensaio pode ser realizado com
frequência de 60Hz.
A impedância total do circuito da Figura 1.9A pode ser obtida de,
=
+
=
+ {(
+
Segundo Chapman (2005), para máquinas da classe D,
consideração e substituindo
=(
− ) e
equação A(17), após algumas manipulações algébricas,
partes reais e imaginárias e resulta em,
=
=
−
−
+
−
)∥(
+
−
)}.
+
=
. Levando isso em
=(
−
) na
pode ser separado em suas
+2
−
A(18)
−
−
+
−
2(
+
−
A(17)
+
)
.
A(19)
O valor da tensão apresentada no Quadro 1.4 é resultado da média das tensões de fase e
a corrente é a média das correntes nas três fases. A potência denominada por
éa
potência trifásica obtida no ensaio.
Quadro 1.4: Medições obtidas no ensaio com rotor bloqueado.
Ensaio com rotor bloqueado
Temp. Inicial e Final(C °)
31,4 - 43,8
V bloqueado (V)
Ibloqueado (A)
Pbloqueado (W)
40,67
13,87
625
O fator de potência FP do circuito da Figura 1.9 pode ser calculado por,
=
3.
=
625
= 0,3693.
40,67.13,87
A(20)
A impedância total do circuito da Figura 1.9A pode ser obtida através da equação
A(21).
128
=
40.67
⇒
13,87
=
= 2,932Ω
Com os dados obtidos de A(20) e A(21), o valor de
=
.
⇒
A(21)
pode ser encontrado.
= 1,083Ω
A(22)
A correção da resistência bloqueada para a temperatura de 25C (ensaio realizado a
aproximadamente 44C) resulta em
= 1,01Ω.
Com os valores obtidos em A(21) e A(22) a reatância indutiva pode ser calculada por
=
−
=
2,932 − 1,01 = 2,753Ω.
A(23)
Substituindo
obtido através da equação A(18) na equação A(19), após algumas
simplificações é possível escrever
+
+
=0
A(24)
sendo que,
=
−
= −2(
+
=
−
=
−
=
−
=
−
)
+
.
A(25)
Embora a equação A(24) apresenta duas soluções na forma
=
−
±
−4
2
A(26)
129
Seyoum (2003) mostra que a solução que leva em consideração o termo negativo da equação
A(26), ou seja,
=
−
−
−4
A(27)
2
é que realmente possui significado físico.
Substituindo os valores de
,
,
e
encontrados
a partir das equações A(22), A(23), A(18) e A(19) nas equações A(25) e resolvendo A(27), é
possível encontrar o valores
=
que resulta em
=
= 1,4091Ω.
A solução da equação A(18) obtida com a substituição de
resulta em
= 0,3948Ω.
Finalmente com tais parâmetros calculados,
pode ser calculado com o auxílio da
equação A(11) apresentada novamente em A(28) e resulta em
=
−
⇒
= 28,74 − 1,4091 = 27,33Ω.
Com o valor de
obtido de A(09),
A(8) apresentada novamente em A(29).
=
+
⇒
=
e
A(28)
podem ser calculados a partir da equação
0,844 + 27,33
⇒
0,844
= 885,83Ω
A(29)
=
+
⇒
=
0,844 + 27,33
⇒
27,33
= 27,36Ω
O circuito equivalente em regime permanente por fase pode ser visualizado na Figura
1.10A.
Figura 1.10A: Parâmetros do circuito equivalente e em regime permanente para o GI.
130
5.0 Curva de Magnetização
Em regime permanente a reatância de magnetização
é constante e a máquina opera
em um ponto onde a corrente de magnetização encontra-se saturada. O valor da indutância de
magnetização dada por
=
A(30)
2πf
onde f é a frequência síncrona, é importante para verificar o comportamento do gerador em
regime permanente, porém, a dinâmica da máquina e a autoexcitação dependem
exclusivamente da curva
x
denominada de curva de magnetização, como apresentado
em Bodson and Kiselychnyk (2010b) e Kalemen et al. (2012).
De uma forma geral, a curva de magnetização é obtida através do ensaio a vazio á
velocidade síncrona. As ligações dos equipamentos e acoplamentos mecânicos são os mesmos
já apresentados na Figura 1.7A. Quando o gerador atinge a velocidade síncrona com o auxílio
da máquina primária, a tensão nos terminais do estator do gerador é aumentada de zero até
atingir aproximadamente 120% da tensão nominal. Como apresentado por Seyoum (2003),
Kalemen et al. (2012), as medições das tensões, correntes e potências ativas auxiliam na
determinação da curva. A Figura 1.11A(a) mostra o circuito equivalente para este ensaio.
Figura 1.0.11A: Ensaio a vazio e à velocidade síncrona. (a) Circuito equivalente. (b)
Aproximação do circuito equivalente.
O diagrama fasorial para o circuito da Figura 1.11A(a) pode ser observado na Figura
1.12A(a) e os valores da tensão interna e da corrente
resultam em
=
−(
+
)| |
A(31)
131
=
sinφ
A(32)
Figura 1.12A: Diagramas fasoriais para o ensaio a vazio e à velocidade síncrona. (a)
Diagrama fasorial para o circuito equivalente. (b) Diagrama fasorial para a aproximação do
circuito equivalente.
O ângulo φ (Fator de potência) pode ser obtido a partir dos valores medidos de corrente,
tensão e potência com o auxílio da equação A(20). A tensão interna
calculada com a
equação A(31) resulta em um fasor cujo ângulo α depende da resistência de estator e da
reatância de dispersão de estator, portanto, para cada valor de tensão, corrente e potência
medida no ensaio, um valor de
deve ser encontrado a fim de possibilitar o cálculo de
a
partir da equação A(33).
=
A(33)
2πf
Na prática, o valor de
para cada valor de tensão aplicada e corrente resultante no
gerador não é calculado. A aproximação geralmente utilizada é assumir o circuito da Figura
1.11A(b), onde a resistência de perdas no ferro do estator é eliminada (muito maior
)ea
queda de tensão sobre todo o ramo indutivo torna-se
=
−
.
A(34)
Como
≪
o ângulo α′ verificado no diagrama fasorial da Figura 1.12A(b) pode
ser considerado nulo e ′ =
+
, portanto,
′
=
| ′|
.
2πf
A(35)
132
A equação A(35) é uma boa aproximação de
e geralmente é utilizada nos modelos
do gerador de indução, como apresentado por Seyoum (2003), Bodson and Kiselychnyk
(2010a) e vários outros trabalhos. Stankovic et al. (2003), apresentam outro método de ensaio
que permite encontrar
sem o termo de
embutido nos resultados, porém as curvas
obtidas com o ensaio proposto por tais autores são idênticas ás curvas obtidas com os ensaios
convencionas e diferem apenas por um pequeno deslocamento da curva no sentido do eixo
das abscissas.
O gráfico da Figura 1.13A mostra a curva de magnetização obtida no ensaio. A
aproximação dos pontos experimentais pode ser definida por dois polinômios “a” e “b”,
apresentados na equação A(36).
0<
(
≤ 2,66 ⇒
) = −0.0001
+ 0.002
− 0.0190
+ 0.0555
+ 0.1656
( )
A(36)
2,66 <
(
≤ 13,5 ⇒
) = 0.00004351
− 0.00020814
− 0.01762
+ 0.2592
( )
A linha tracejada da Figura 1.13A é a extrapolação do polinômio “a” até
=0 .
Devido à impossibilidade de medições de potência ativa para pequenos valores de corrente
(escala dos dispositivos de medição), a extrapolação da curva possibilita uma aproximação de
para valores de corrente de magnetização próximos a zero ( (0) =
= 0.1656 ).
0.22
Dados Experimentais
Polinômio 4a Ordem
Dados Experimentais
0.2
Polinômio 3a Ordem
0.18
Extrapolação Pol. 4a Ordem
Lm(H)
0.16
0.14
0.12
0.1
0.08
0
2
4
6
8
10
Corrente de Magnetização i (A)
12
14
m
Figura 1.13A: Curva de magnetização para o GI.
A Figura 1.14A mostra a curva da indutância de magnetização em função da tensão
interna ′ de fase, cuja aproximação resulta no polinômio de quarta ordem da equação A(37).
133
( ′) = −1 10
′
+ 6 10
′
− 2 10 0
′
+ 0.0016
′ + 0.1605
A(37)
0.22
0.2
0.18
Lm(H)
0.16
0.14
0.12
Dados Experimentais
Polinômio 4a Ordem
Extrapolação da Curva
0.1
0.08
0
50
100
150
Tensão de Fase Vi´(V)
Figura 1.14A: Variação de
200
250
em função da tensão interna Vi'.
A Figura 1.15A mostra a curva da tensão ′ de fase em função da corrente de
magnetização, cuja aproximação resulta no polinômio de terceira ordem da equação A(38).
(
) = 0.18226
− 5.6394
+ 63.2870
− 10.8159
A(38)
Tensão de fase interna Vi´(V)
250
200
150
100
Dados Experimentais
50
0
Polinômio 3a Ordem
Extrapolação da Curva
2
4
6
8
10
Corrente de magnetização i (H)
12
14
m
Figura 1.15A: Variação da tensão Vi' em função de
.
134
Apêndice B
Características Eletromecânicas do GI
Tabela B.1: Parâmetros elétricos do gerador de indução.
Parâmetro Especificação do Parâmetro
( ) Potência
Número de polos
V
Tensões de alimentação
Corrente nominal em dupla estrela
Corrente de rotor bloqueado
/
Fator de potência a 100% da potência nominal
cos
Rendimento a 100% da potência nominal
FS
Fator de serviço
Tempo máximo com rotor bloqueado
Resistência de estator
Resistência de rotor
Perdas no núcleo
Indutância de dispersão do estator
Indutância de dispersão do rotor
Indutância de magnetização em regime
permanente
Valor
7.5kW(10CV)
4
220/380/440V
14.1A
8.5
0.84
89.50%
1.15
6s
0.721Ω a 25C
0.395Ω a 25C
885.83Ω a 25C
3.737mH
3.737mH
72.575mH
Tabela B.2: Parâmetros mecânicos do gerador de indução.
Parâmetro Especificação do Parâmetro
Carcaça
Tipo e tamanho da carcaça
Velocidade mecânica em rotações por minuto
Conjugado nominal
Conjugado com rotor bloqueado
/
Conjugado máximo
./
J
Momento de Inércia
135
Valor
132S
1770RPM
4.05kgf.m
260%
310%
0.0035kg.m2
Download