Transporte
TransformaçãoXII
em
Trabalhos vencedores do Prêmio CNT
Produção Acadêmica 2007
Transporte
TransformaçãoXII
em
Trabalhos vencedores do Prêmio CNT
Produção Acadêmica 2007
Confederação Nacional do Transporte – CNT
SAUS Quadra 1 – Bloco “J” Entradas 10 e 20
Ed. Confederação Nacional do Transporte – 13º. e 14º. Andares
Brasília – DF CEP: 70070-944
Telefone: (61) 3315-7000
Fale com a CNT: 0800 728 2891
Site: www.cnt.org.br
Associação Nacional de Pesquisa e Ensino em Transportes – ANPET
Rua Marquês de São Vicente, 225 – sala 954L
Ed. Cardeal Leme Gávea
Rio de Janeiro – RJ CEP: 22453-900
Telefone: (21) 2562-8727
Site: http://www.anpet.org.br
Transporte em Transformação XII - Trabalhos Vencedores do Prêmio CNT
Producção Acadêmica 2007.
© 2008 CNT - Confederação Nacional do Transporte / ANPET - Associação Nacional de
Pesquisa e Ensino em Transporte.
Todos os direitos para a língua portuguesa reservados para CNT/ANPET.
Nenhuma parte desta publicação poderá ser reproduzida, guardada pelo sistema retrieval ou
transmitida de qualquer modo ou por qualquer outro meio, seja este eletrônico, mecânico, de
fotocópia, de gravação, ou outros, sem prévia autorização, por escrito, da Editora.
Impresso no Brasil
ISBN: 978-85-9908-206-5
Tiragem: 1000 exemplares
Coordenação Editorial:
Gráfica e Editora Positiva Ltda.
Composição e Impressão:
Gráfica e Editora Positiva Ltda.
Dados Internacionais de Catalogação na Publicação (CIP)
Transporte em transformação XII: trabalhos vencedores do prêmio CNT de Produção Aca dêmica 2007/
Confederação Nacional do Transporte, Associação Nacional de Pesquisa e Ensino em
Transporte. -Brasília: Positiva, 2008.
220 p.
ISBN: 978-85-9908-206-5
Trabalhos apresentados durante o XX II Congresso da ANPET realizado em Fortaleza (CE)
no período de
3 a 7 de novembro de 2007.
1. Tráfego veículos pesados. 2. Diagramas de Voronoi. 3. Problemas de transportes. 4. Transporte de cimento. 5. Agrupamento de cargas fracionadas. 6. Tanqueamento de combustível.
7. Retenção de transporte urbano. 8. Gestão pública municipal de trânsito. 9. Rota marítima
– contêiner. 10. Acessibilidade por transporte coletivo. 11. Fonte de energia para transporte.I.
Associação Nacional de Pesquisa e Ensino em Transportes – ANPET. II.Aquino, Juliana Jerônimo de. III. Setti, José Reynaldo A. IV. Novaes, Antonio Galvão. V. Mirua, Marcos. VI. Cunha,
Cláudio Barbieri da. VII. Fregnani, José Alexandre Tavares Guerreiro. VIII. Miller, Carlos. IX.
Coréia, Anderson Ribeiro. X. Kochler, Luiz Alberto. XI. Kraus Júnior, Werner. XII. Camponogara, Eduardo. XIII. Oliveira, Marcelo Leismann de. XIV. Cybis, Helena Beatriz Bettella. XV.
Sousa, Felipe Brum de. XVI. França, Luis Cláudio Rodrigues de. XVII. Jacques, Maria Alice
Prudêncio. XVIII. Caillaux, Marcio Arzua. XIX. Sant”anna, Annibal Parracho. XX. Meza, Lídia Ângulo. XXI. Mello, João Carlos Correia Baptista Soares de. XXII. Ferronatto, Luciana
Guadalupe. XXIII. Michel, Fernando Dutra. XXIV. D’Agosto, Márcio de Almeida. XXV. Ribeiro, Suzana Kahn. XXVI. Título.
CDU: 656.132
Autores dos Trabalhos
Vencedores do Prêmio CNT
Produção Acadêmica – 2007
Juliana Jerônimo de Araújo
José Reynaldo A. Setti
Antônio Galvão Novaes
Marcos Miura
Cláudio Barbieri da Cunha
José Alexandre Tavares Guerreiro Fregnani
Carlos Muller
Anderson Ribeiro Correia
Luiz Alberto Koehler
Werner Kraus Júnior
Eduardo Camponogara
Marcelo Leismann de Oliveira
Felipe Brum de Brito Sousa
Helena Beatriz Bettella Cybis
Luis Cláudio Rodrigues de França
Maria Alice Prudêncio Jacques
Marcio Arzua Caillaux
Annibal Parracho Sant’anna
Lidia Angulo Meza
João Carlos Correia Baptista Soares de Mello
Luciana Guadalupe Ferronatto
Fernando Dutra Michel
Márcio de Almeida D’Agosto
Suzana Kahn Ribeiro
Confederação Nacional do Transporte – CNT
CLÉSIO SOARES DE ANDRADE
Presidente
THIERS FATTORI COSTA
Presidente de Honra
Vice-Presidentes da CNT
NEWTON JERÔNIMO GIBSON DUARTE RODRIGUES
Transporte de Cargas
METON SOARES JÚNIOR
Transporte Aquaviário, Ferroviário e Aéreo
MARCO ANTONIO GULIN
Transporte de Passageiros
JOSÉ FIORAVANTI
Transportadores Autônomos, de Pessoas e de Bens
Presidente de Seção e Vice-Presidente de Seção
OTÁVIO VIEIRA DA CUNHA FILHO
ILSO PEDRO MENTA
Seção do Transporte de Passageiros
FLÁVIO BENATTI
ANTÔNIO PEREIRA DE SIQUEIRA
Seção do Transporte de Cargas
JOSÉ DA FONSECA LOPES
MARIANO COSTA
Seção dos Transportadores Autônomos, de Pessoas e de Bens
GLEN GORDON FINDLAY
HERNANI GOULART FORTUNA
Seção do Transporte Aquaviário
RODRIGO VILAÇA
Seção do Transporte Ferroviário
WOLNER JOSÉ PEREIRA DE AGUIAR
JOSÉ AFONSO ASSUMPÇÃO
Seção do Transporte Aéreo
Conselho Fiscal – Titulares
DAVID LOPES DE OLIVEIRA
ÉDER DAL’LAGO
LUIZ MALDONADO MARTHOS
JOSÉ HÉLIO FERNANDES
Conselho Fiscal – Suplentes
WALDEMAR ARAÚJO
ANDRÉ LUIZ ZANIN DE OLIVEIRA
JOSÉ VERONEZ
Diretoria
Seção do Transporte Rodoviário de Cargas
LUIZ ANSELMO TROMBINI
EDUARDO FERREIRA REBUZZI
PAULO BRONDANI
IRANI BERTOLINI
PEDRO JOSÉ DE OLIVEIRA LOPES
OSWALDO DIAS DE CASTRO
DANIEL LUÍS CARVALHO
AUGUSTO EMÍLIO DALÇÓQUIO
GERALDO AGUIAR BRITO VIANNA
AUGUSTO DALÇÓQUIO NETO
EUCLIDES HAISS
PAULO VICENTE CALEFFI
FRANCISCO PELÚCIO
Seção do Transporte de Passageiros
LUIZ WAGNER CHIEPPE
ALFREDO JOSÉ BEZERRA LEITE
JACOB BARATA FILHO
JOSÉ AUGUSTO PINHEIRO
MARCUS VINÍCIUS GRAVINA
TARCÍSIO SCHETTINO RIBEIRO
JOSÉ SEVERIANO CHAVES
EUDO LARANJEIRAS COSTA
ANTÔNIO CARLOS MELGAÇO KNITELL
ABRÃO ABDO IZACC
FRANCISCO SALDANHA BEZERRA
JERSON ANTONIO PICOLI
JOSÉ NOLAR SCHAEDLER
MÁRIO MARTINS
Seção dos Transportadores Autônomos, de Pessoas e de Bens
EDGAR FERREIRA DE SOUSA
JOSÉ ALEXANDRINO FERREIRA NETO
JOSÉ PERCIDES RODRIGUES
LUIZ MALDONADO MARTHOS
SANDOVAL GERALDINO DOS SANTOS
DIRCEU EFIGENIO REIS
ÉDER DAL’ LAGO
ANDRÉ LUIZ COSTA
MARIANO COSTA
JOSÉ DA FONSECA LOPES
CLAUDINEI NATAL PELEGRINI
GETÚLIO VARGAS DE MOURA BRAATZ
NILTON NOEL DA ROCHA
NEIRMAN MOREIRA DA SILVA
Seção do Transporte Aquaviário, Ferroviário e Aéreo
LUIZ REBELO NETO
PAULO DUARTE ALECRIM
ANDRÉ LUIZ ZANIN DE OLIVEIRA
MOACYR BONELLI
JOSÉ CARLOS RIBEIRO GOMES
PAULO SERGIO DE MELLO COTTA
MARCELINO JOSÉ LOBATO NASCIMENTO
RONALDO MATTOS DE OLIVEIRA LIMA
JOSÉ EDUARDO LOPES
FERNANDO FERREIRA BECKER
PEDRO HENRIQUE GARCIA DE JESUS
JORGE AFONSO QUAGLIANI PEREIRA
ECLÉSIO DA SILVA
Diretoria da ANPET
MARILITA GNECCO DE CAMARGO BRAGA
Presidente
MARIA CRISTINA FOGLIATTI DE SINAY
Diretora Executiva
HELENA BEATRIZ BETTELLA CYBIS
Diretora Cinetífica
GLAUCO TÚLIO PESSA FABRI
Diretor
MARIA LEONOR ALVES MAIA
Diretora
ORLANDO FONTES LIMA JÚNIOR
Diretor
PAULO CESAR MARQUES DA SILVA
Diretor
WERNER KRAUS JÚNIOR
Diretor
Comissão Julgadora dos Artigos
Enga. FERNANDA PINHEIRO REZENDE – CNT
Prof . JORGE AUGUSTO PEREIRA CERATTI – UFRGS
Prof . JOSÉ EUGENIO LEAL – PUC-RIO
Profa. MARIA LEONOR ALVES MAIA - UFPE
Sumário
Prefácio.............................................................................................................21
Capítulo 1
Análise do efeito do tráfego de veículos
pesados sobre uma ponte através de simulação
microscópica................................................................... 23
Resumo.................................................................................................... 23
Abstract.................................................................................................... 24
1. Introdução........................................................................................... 24
2. Objetivo............................................................................................... 25
3. Justificativa......................................................................................... 25
4. Carregamento móvel para análise estrutural de pontes....................... 26
5. O Simulador Corsim........................................................................... 27
5.1. Rede simulada.......................................................................... 27
6. Coleta de dados................................................................................... 27
6.1. Dados para caracterização do tráfego e estimativa da matriz
origem/destino................................................................................. 28
6.2. Dados sobre as características dos veículos pesados............... 30
7. calibração e validação do corsim........................................................ 33
8. Estudo de caso..................................................................................... 37
Agradecimentos....................................................................................... 41
Referências Bibliográficas....................................................................... 42
Capítulo 2
Resolução de Problemas de Transporte
com Diagramas de Voronoi............................................ 43
Resumo.................................................................................................... 43
Abstract.................................................................................................... 44
1. Introdução............................................................................................ 44
2. Diagramas de Voronoi . ....................................................................... 46
3. Aspectos Computacionais ................................................................... 49
4. APLICAÇÃO AOS TRANSPORTES................................................. 52
4.1 Descrição do problema . ........................................................... 52
4.2 Diagrama de Voronoi correspondente....................................... 53
4.3 Modelo de localização/alocação............................................... 56
4.4 Aplicação do modelo................................................................. 57
5. Conclusões........................................................................................... 58
Agradecimento......................................................................................... 59
Referências Bibliográficas....................................................................... 60
Capítulo 3
Modelagem Heurística no Problema de
Distribuição de Cargas Fracionadas de Cimento........ 63
Resumo.................................................................................................... 63
Abstract.................................................................................................... 64
1. Introdução............................................................................................ 64
2. Revisão Bibliográfica........................................................................... 66
3. Caracterização do Problema................................................................ 68
4. Formulação Matemática....................................................................... 69
5. Estratégia de Solução........................................................................... 70
5.1. Fases I e II: Algoritmo para resolução do VSBPP................... 72
5.2. Fases III: Agrupamento de cargas de cidades diferentes.......... 75
6. Experimentos Computacionais............................................................ 76
7. Considerações Finais........................................................................... 79
Referências Bibliográficas....................................................................... 81
Capítulo 4
Um Modelo para a Minimização dos Custos
Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de
uma Empresa Aérea Doméstica Brasileira.................. 83
Resumo.................................................................................................... 83
Abstract.................................................................................................... 84
1. Introdução............................................................................................ 84
2. Procedimento para tanqueamento de combustível............................... 86
3. Revisão Bibliográfica........................................................................... 87
4. Modelo Proposto.................................................................................. 89
5. Aplicação do Modelo........................................................................... 92
6. Resultados.. ..........................................................................................97
7. Considerações Finais........................................................................... 99
Referências Bibliográficas..................................................................... 102
Capítulo 5
Controle de Retenção para Sistemas de
Transporte Público....................................................... 105
Resumo.................................................................................................. 105
Abstract.................................................................................................. 106
1. Introdução......................................................................................... 106
2. Operação em Tempo Real do Sistema de Transporte Público ......... 107
2.1. Estratégia de Controle Tipo Retenção.................................... 107
2.2. Classificação das Estratégias de Controle Tipo Retenção..... 108
3. Modelo de um Sistema de Controle de Retenção para Brt............... 110
3.2. Características do Modelo e da Solução Proposta ................ 115
4. Estudo de Caso.................................................................................. 117
5. Conclusões........................................................................................ 119
Referências Bibliográficas..................................................................... 121
Capítulo 6
Selecionando Indicadores de
Desempenho para Praças de Pedágio......................... 123
Resumo.................................................................................................. 123
Abstract ................................................................................................. 124
1. Introdução.......................................................................................... 124
2. Indicadores de Desempenho.............................................................. 125
2.1. Estado da Arte de Indicadores de Desempenho para Praças
de Pedágio..................................................................................... 126
2.2. Estado da Prática sobre Indicadores de Desempenho para
Praças de Pedágio.......................................................................... 130
3. Mecanismo de viabilidade de utilização de indicadores.................... 131
3.1. Critérios de Julgamento para Análise de Viabilidade
de Indicadores............................................................................... 132
3.2. Escalas de Medidas para os Critérios e Sub-Critérios
de Julgamento................................................................................ 133
3.3. Cálculo das Viabilidades de Utilização dos Indicadores........ 134
4. Análise dos indicadores..................................................................... 135
5. Considerações finais........................................................................... 138
Referências Bibliográficas..................................................................... 140
Capítulo 7
Avaliação da Eficácia da Gestão
do Trânsito em Nível Municipal.................................. 143
Resumo.................................................................................................. 143
Abatract.................................................................................................. 144
1. Introdução.......................................................................................... 144
2. Municipalização do Trânsito no Brasil.............................................. 145
2.1. Situação Atual dos Municípios Brasileiros Frente à
Municipalização............................................................................ 146
3. Técnica de Análise Multicritério........................................................ 150
4. Prodecimento Proposto...................................................................... 152
5. Exemplo de Resultados do Procedimento Proposto.......................... 158
6. Avaliação do Procedimento Proposto............................................... 159
7. Conclusões......................................................................................... 160
Referências Bibliográficas..................................................................... 162
Capítulo 8
Seleção de Rota Marítima de Contêineres................. 163
Resumo.................................................................................................. 163
Abstract.................................................................................................. 164
1. Introdução......................................................................................... 164
2. Técnicas Utilizadas .......................................................................... 165
2.1. DEA........................................................................................ 166
2.2. Método de Copeland.............................................................. 168
2.3. Composição Probabilística..................................................... 168
3. DEA em Transportes......................................................................... 171
4. Modelagem....................................................................................... 172
5. Modelos Utilizados........................................................................... 174
6. Considerações finais.......................................................................... 177
Agradecimentos..................................................................................... 178
Referências Bibliográficas..................................................................... 179
Capítulo 9
Índice de Acessibilidade por Transporte Coletivo..... 181
Resumo.................................................................................................. 181
Abstract.................................................................................................. 182
Palavras-chave....................................................................................... 182
1. Introdução.......................................................................................... 182
2. Acessibilidade: definição e quantificação.......................................... 183
2.1. Quantificação da acessibilidade............................................. 183
2.1.1. Como medir......................................................................... 184
2.2 Índices de acessibilidade......................................................... 184
2.3. Ferramentas utilizadas............................................................ 185
3. Estrutura do índice de acessibilidade por transporte coletivo............ 186
3.1. Unidades de análise................................................................ 186
3.2. Fatores de acessibilidade........................................................ 186
3.3. Formulação do Índice............................................................. 186
4. Aplicação............................................................................................ 189
4.1. Acessibilidade das paradas de ônibus.................................... 190
4.2. Acessibilidade das zonas de tráfego....................................... 191
4.3. Sensibilidade do índice.......................................................... 193
5. Oferta x demanda............................................................................... 194
6. Conclusões e desenvolvimento futuro............................................... 196
Referências Bibliográficas..................................................................... 198
Capítulo 10 Procedimento de Análise de Ciclo de
Vida para Comparação de Fontes de
Energia para o Transporte no Brasil.......................... 199
Resumo.................................................................................................. 199
Abstract.................................................................................................. 200
1. Introdução.......................................................................................... 200
2. Aplicação da ACV às Fontes de Energia para Transporte................. 201
3. Proposta de Procedimento.................................................................. 203
3.1. FASE 1: Objetivo e escopo.................................................... 204
3.2. FASE 2: Análise do inventário............................................... 206
3.3. FASE 3: Avaliação dos dados................................................. 206
3.4. FASE 4: Comparação dos resultados..................................... 207
4. Verificação do Procedimento............................................................. 207
4.1. FASE 1: Objetivo e escopo.................................................... 207
4.1.1. FASE 1 – ETAPA 1 - Abrangência...................................... 207
4.1.2. FASE 1 – ETAPA 2 - Dimensões........................................ 209
4.2. FASE 2: Análise do inventário............................................... 210
4.3. FASE 3: Avaliação dos dados................................................. 212
4.4. FASE 4: Comparação dos resultados e discussão.................. 212
5. Conclusões e Recomendações........................................................... 215
Referências Bibliográficas..................................................................... 217
Prefácio
A Confederação Nacional do Transporte (CNT) incentiva os trabalhos
acadêmicos no âmbito da atividade transportadora, com o intuito de estimular a
descoberta de tecnologias e formas de gestão.
As novidades que surgem a partir das pesquisas contribuem para a melhoria
da produtividade e da competitividade e, conseqüentemente, para o crescimento e o
desenvolvimento do setor de transporte no Brasil.
Sob a ótica do incentivo à pesquisa – e conseqüentemente da inovação -, foi
criado, em 1996, o Prêmio CNT Produção Acadêmica. A partir daí, as metodologias,
as experimentações e os resultados obtidos pelos pesquisadores são acompanhados
pela Confederação e pela Associação Nacional de Pesquisa e Ensino em Transportes
(ANPET).
A cada ano, os dez artigos científicos mais relevantes recebem uma premiação
e são publicados neste “Transporte em Transformação”.
As propostas vencedoras devem ser de fácil implementação e abordar
questões como soluções dos problemas na operação e planejamento de transporte;
alternativas para se chegar à redução de custos; inovações tecnológicas e de
logística; responsabilidade social e ambiental; gestão de recursos; propostas e
estudos de regulamentação do setor.
A parceria firmada com a ANPET também concretiza a meta da CNT
de incentivo constante à maior especialização do trabalhador do transporte e
aperfeiçoamento das empresas.
Análise do efeito do tráfego de
veículos pesados sobre uma
ponte através de simulação
microscópica
1
Juliana Jerônimo de Araújo
José Reynaldo A. Setti
Universidade de São Paulo
Escola de Engenharia de São Carlos
Resumo
O objetivo deste trabalho foi desenvolver um método para estabelecer o efeito
das características e da operação dos veículos pesados sobre uma ponte através do
uso de resultados de simulação microscópica de tráfego. Para isso, foi necessária
a aquisição de um conjunto de dados sobre as características de veículos pesados
e a obtenção de um modelo de simulação calibrado para um trecho de rodovia de
pista dupla. A metodologia desenvolvida é demonstrada através da realização de
um estudo de caso em que foram simulados dois cenários de tráfego e em que foi
considerada uma ponte hipotética com 100 m de extensão. Os resultados do estudo
de caso demonstram a viabilidade do procedimento proposto.
24
Transporte em Transformação XI
Abstract
The objective of this research was to develop a method for establishing the
effect of heavy vehicles characteristics and operation on a highway bridge by using
the results of a microscopic traffic simulation model. Therefore, it was necessary
to acquire a database with the characteristics of these vehicles and to calibrate a
traffic simulation model for a multilane highway. The developed methodology is
demonstrated through a case study in which two traffic scenarios were simulated
and in which a hypothetic 100 m bridge was considered. The case study results demonstrate the proposed procedure viability.
1. Introdução
Segundo a Confederação Nacional do Transporte (2006), em 2005, o transporte de 47,5% da carga brasileira foi feito pelo modo rodoviário, com mais de 790
milhões de toneladas transportadas por uma frota que ultrapassa os dois milhões
de veículos pesados. Nesse cenário, os veículos pesados desempenham um papel
relevante, suscitando a necessidade de analisar o impacto que eles ocasionam não
somente em termos de operação, como também no projeto e na manutenção da
infra-estrutura rodoviária.
De forma geral, as leis que regulamentam os pesos e as dimensões dos veículos pesados visam reduzir o impacto provocado pelo seu tráfego. Na fase de projeto da infra-estrutura rodoviária, fatores tais como largura de faixas de rolamento,
alinhamento horizontal de curvas e espessura do pavimento estão diretamente relacionados às características dos veículos pesados. Na fase de manutenção, essas
características estão ligadas ao desgaste dos pavimentos e pontes.
Um aspecto a ser notado é que o constante desenvolvimento da indústria de
transporte rodoviário e o conseqüente aumento das cargas transportadas pelos veículos podem ocasionar desgastes maiores do que os previstos tanto para a pavimentação quanto para as pontes e viadutos. Portanto, é desejável aperfeiçoar a determinação de como a ação do carregamento móvel é levada em consideração durante o
processo de dimensionamento da infra-estrutura rodoviária.
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
25
2. Objetivo
A meta principal deste trabalho é desenvolver uma metodologia para estabelecer o efeito das características e da operação dos veículos pesados sobre uma
ponte através do uso de resultados de simulação microscópica de tráfego. Para tanto, foram estabelecidos dois objetivos secundários: 1) aquisição de um conjunto de
dados com amostra de tamanho significativo sobre as diversas características de
veículos pesados; e 2) obtenção de um modelo de simulação de tráfego calibrado
para um trecho de rodovia de pista dupla.
A metodologia proposta combina esses dois aspectos na medida em que associa dados microscópicos extraídos de um simulador a um banco de dados detalhado
sobre as características dos veículos pesados para obter um carregamento móvel
decorrente do tráfego desses veículos. Para demonstrar como a metodologia desenvolvida pode ser utilizada, efetuou-se um estudo de caso que calculou o efeito
ocasionado pela presença simultânea de veículos pesados sobre uma ponte, a fim de
compará-lo com o provocado pelo trem-tipo estabelecido pela norma brasileira.
3. Justificativa
O dimensionamento de pontes leva em conta vários fatores, sendo a ação do
tráfego um dos mais significativos. O valor real do carregamento do tráfego é considerado difícil de modelar de uma forma precisa devido à sua aleatoriedade e, por
isso, os engenheiros estruturais costumam fazer várias simplificações para tornar
essa tarefa possível.
De acordo com a norma brasileira, NBR-7188, a ação das cargas móveis no
processo de análise estrutural de pontes não corresponde aos veículos reais que trafegam sobre as mesmas, mas a um carregamento hipotético que tenta reproduzir as
solicitações provocadas pelo tráfego (ABNT, 1984). Esse carregamento, que possui
o nome de trem-tipo, consta de um veículo-tipo de peso e geometria estabelecidos
pela própria norma e de cargas uniformemente distribuídas.
Um fato importante a ser observado é que, apesar das combinações de carga
apresentadas na NBR-7188 terem como objetivo reproduzir as solicitações provo-
26
Transporte em Transformação XI
cadas pelo tráfego real sobre as pontes, em nenhuma delas é prevista a passagem simultânea de dois ou mais veículos-tipo, ao contrário do que acontece nas situações
reais de carregamento.
Dessa forma, este trabalho propõe como ferramenta de análise o uso de um
modelo de simulação de tráfego capaz de representar adequadamente os fluxos
observados em campo e que possua um bom nível de detalhamento. Os resultados
da simulação fornecem dados importantes, como a probabilidade de ocorrência
simultânea de veículos pesados na ponte e a posição relativa desses veículos. A
associação dessas informações a um banco de dados que contém as características
dos veículos pesados (tais como pesos por eixo e distâncias entre eixos) permite
obter os carregamentos totais nas pontes e as localizações dessas cargas de uma
forma mais realística, uma vez que leva em consideração os efeitos da composição
do tráfego e da mecânica de car-following sobre o espaçamento e o headway entre
veículos na corrente de tráfego.
4. Carregamento móvel para análise estrutural de pontes
O desenvolvimento de modelos de carregamento móvel vem sendo tema de
vários estudos, principalmente no exterior. O interesse no assunto resulta da preocupação com a evolução da indústria de transporte rodoviário, que busca otimizar
esse modo de transporte através do uso de veículos cada vez mais pesados, comprometendo a segurança das obras de arte especiais. No Brasil, os principais trabalhos
que tratam das cargas móveis para a análise estrutural de pontes são recentes, uma
vez que o foco principal das pesquisas realizadas sempre foi a análise e o dimensionamento de pavimentos (Luchi, 2006).
Os modelos desenvolvidos sobre o tema se baseiam fundamentalmente na
teoria dos processos estocásticos, na concepção de configurações estáticas do tráfego ou na simulação do fluxo de tráfego através do método de Monte Carlo (Ghosn
e Moses, 1985; Nowak e Hong, 1991; Crespo-Minguillón e Casas, 1997; Luchi,
2006). Dentre eles, considera-se que os modelos de simulação de tráfego são os
mais completos, apesar de uma de suas características ser a grande quantidade de
dados que são necessários para a obtenção de um bom resultado.
Este trabalho utiliza o simulador de tráfego CORSIM para avaliar o impacto
do tráfego de veículos pesados sobre uma ponte e procura levar em consideração
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
27
um grande número de variáveis para que o modelo simule de forma realística o
tráfego observado em uma rodovia de pista dupla típica no estado de São Paulo.
A abordagem proposta evita os efeitos causados por suposições simplificadoras e
incorpora os efeitos de car-following na modelagem do posicionamento de veículos
pesados sobre as pontes.
5. O Simulador Corsim
O CORSIM foi desenvolvido e é mantido pelo Federal Highway Administration.
Nele, cada veículo é modelado individualmente e pode ser identificado pela sua
classe (automóvel, caminhão, ônibus e carpool). Um total de nove tipos diferentes
de veículos pode ser especificado para caracterizar as quatro classes.
O CORSIM é implementado em ambiente Windows através da interface TSIS
que, através do pós-processador TRAFVU, permite que o usuário visualize a rede
simulada graficamente e acompanhe seu desempenho. A resolução do CORSIM
para descrever as operações do tráfego é de um segundo, ou seja, cada veículo é
modelado como um objeto que se move a cada segundo, enquanto cada tipo de controle de tráfego na rede também é atualizado a cada segundo.
5.1. Rede simulada
Neste trabalho, o modelo desenvolvido para a simulação faz a representação
da Rodovia Washington Luís (SP-310), em seus dois sentidos de tráfego, no trecho
que margeia a cidade de São Carlos - SP. A rede simulada tem extensão aproximada
de 7,5 km e possui 11 acessos de entrada e saída no sentido Norte (capital-interior) e
16 acessos de entrada e saída no sentido Sul (interior-capital). A construção da rede
foi baseada no projeto geométrico da rodovia.
6. Coleta de dados
Dois tipos de coletas de dados foram necessários. O primeiro deles estava
relacionado aos dados de tráfego usados na simulação, que serviram para calibrar e
validar o CORSIM, e o segundo, à caracterização da frota de veículos pesados que
28
Transporte em Transformação XI
trafega no estado de São Paulo. Essa caracterização tornou possível a realização do
estudo de caso proposto.
6.1. Dados para caracterização do tráfego e estimativa da matriz
origem/destino
Para esta pesquisa, além de dados caracterizando o fluxo e a composição do
tráfego, também foram coletados dados de origem/destino e da velocidade da corrente de tráfego. A obtenção da matriz origem/destino foi considerada necessária
para que pudesse representar o tráfego observado com o grau de fidelidade desejado. As observações de velocidade média da corrente de tráfego em postos de
controle ao longo do trecho foram necessárias para o processo de calibração e validação do simulador.
Os dados para a caracterização dos fluxos de tráfego e para a estimativa das
matrizes origem/destino foram coletados simultaneamente. O método de coleta utilizado foi a observação e o registro em planilhas, em intervalos de 15 minutos, do
tipo de veículo e dos números existentes em sua placa. Para isso, foram escolhidos
como postos de controle os viadutos localizados nos extremos do trecho de rodovia selecionado, as passarelas de pedestres localizadas em pontos intermediários e
também os acessos de entrada e saída da rodovia. Câmeras de vídeo foram usadas
nos postos de controle da SP-310. As informações relacionadas às coletas de dados
estão contidas na Tabela 1.
Tabela 1: Informações sobre as coletas de dados
Postos de controle
Data da coleta
Horário
SP-310
Acessos
6/6/2005
13/6/2005
1/7/2005
10:00 – 12:00
9:00 – 12:00
14:00 – 17:00
6
6
8
27
27
27
Pesquisadores
envolvidos
23
23
25
Na análise dos dados coletados, verificou-se que os fluxos da primeira e da
segunda coletas de dados mostraram-se bastante similares, uma vez que elas foram
realizadas no mesmo dia da semana e no mesmo período, diferentemente da terceira
coleta. Então, diante da necessidade de segregar os dados coletados em dois conjuntos isolados para fins de calibração e validação do modelo de simulação CORSIM,
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
29
os dados da primeira e da segunda coletas de dados foram selecionados para a calibração e os dados da terceira coleta, para a validação.
Para definição da composição do tráfego, os veículos foram classificados em
três categorias: automóveis, caminhões e ônibus. Entretanto, devido à combinação
de alta velocidade, alto fluxo e posicionamento dos observadores em viadutos e
passarelas, tornou-se inviável verificar o modelo e a configuração de eixos dos caminhões. Como esse dado é considerado de fundamental importância para o estudo
de caso realizado, optou-se pela suposição de que a distribuição dos veículos pesados na rede simulada segue a observada em balanças localizadas em rodovias de
pista dupla no estado de São Paulo (ver item 6.2).
As matrizes origem/destino obtidas são dinâmicas, uma vez que o registro
da hora de passagem do veículo pelos postos de controle associado à categoria e à
placa desse veículo permite fazer a análise para cada período de 15 minutos.
A definição da velocidade média da corrente de tráfego adotada é a média
aritmética das velocidades pontuais de todos os veículos que passam por uma determinada seção da via. Durante o período de planejamento das coletas de dados,
foi estabelecido que as velocidades pontuais dos veículos seriam obtidas usando o
método da base longa como definido pelo DNIT (2006). Nesse método, é fixada
uma distância em campo e calculado o tempo gasto para percorrê-la. A distância foi
escolhida em função das linhas de divisão de fluxos de mesmo sentido que fazem
parte da sinalização horizontal. No trecho estudado essas linhas são seccionadas.
A medição em campo indicou que o padrão adotado no trecho estabelece uma distância 15,5 m. Como as imagens captadas pelas câmeras de vídeo permitiam a visualização de sucessivas linhas seccionadas, foi fixada uma seção de 62 m em cada
posto de controle ao longo da SP-310. Esse valor corresponde à distância de quatro
linhas seccionadas.
Para a obtenção do tempo gasto por cada veículo para percorrer a seção de 62
m de rodovia fez-se uso de uma macro no Microsoft Excel, escrita na linguagem
VBA. A macro desenvolvida permitia a medição do tempo que um veículo demorava para transpor a seção, mediante a utilização do relógio do computador. Esse
relógio era acionado através de teclas de atalho, relacionadas à entrada e à saída do
veículo na seção. Dessa forma, com quatro teclas de atalhos ativadas era possível
registrar a entrada e a saída de todos os veículos em cada uma das duas faixas de tráfego de cada seção. Então, o comprimento da seção dividido pelo tempo gasto para
30
Transporte em Transformação XI
percorrê-la fornece a velocidade, que pode ser considerada a velocidade pontual.
A principal desvantagem na utilização desse método consiste no erro que deriva da
decisão do pesquisador acerca dos instantes de passagem do veículo pelos extremos
da seção.
6.2. Dados sobre as características dos veículos pesados
Para a caracterização da frota de veículos pesados que trafega nas rodovias de
pista dupla do estado de São Paulo, foram realizadas coletas de dados em balanças
localizadas em diferentes rodovias. A localização das balanças, as datas das coletas de dados e os tamanhos das amostras obtidas estão listados na Tabela 2. Esse
conjunto de balanças foi escolhido para que tornasse possível a obtenção de uma
amostra que representasse a variabilidade das características dos veículos pesados,
em uma tentativa de caracterizar a frota que circula em São Paulo.
Tabela 2: Tamanho das amostras obtidas nas coletas
de dados em balanças rodoviárias
Localização
SP-225 (km 224)
SP-330 (km 207)
SP-330 (km 207)
SP-330 (km 53)
SP-330 (km 37)
SP-348 (km 58)
SP-348 (km 40)
SP-310 (km 200)
Sentido
Oeste
Norte
Norte
Sul
Norte
Sul
Norte
Norte
Data da coleta
28/9/2004
7/10/2004
16/2/2005
1/3/2005
2/3/2005
8/3/2005
9/3/2005
12/8/2005
Total
Amostra
192
209
352
968
787
1.901
1.010
834
6.253
As coletas de dados nas balanças rodoviárias foram realizadas por dois
pesquisadores, que registravam em planilha informações tais como marca, modelo,
configuração de eixos dos veículos e existência de eixos erguidos. Essas informações
foram utilizadas no levantamento da potência nominal dos veículos, realizado
através de consulta a dados contidos em catálogos, publicações especializadas e
websites dos fabricantes. Duas câmeras de vídeo também foram utilizadas durante
as coletas de dados, a fim de auxiliar na associação das informações obtidas em
campo com os dados de pesagem contidos em relatórios emitidos pelas balanças.
No total, foram coletados dados de 6.253 caminhões, distribuídos em 22 configurações de eixos. A Tabela 3 lista a nomenclatura das principais configurações
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
31
observadas e apresenta o tamanho das amostras. A análise dessa tabela indica que
59% dos veículos pesados observados nas rodovias paulistas de pista dupla são do
tipo caminhão-plataforma (rígidos) e 41% são articulados. Dentre os articulados, o
caminhão do tipo 2S3 é o mais freqüente (59,6%).
Apesar de existirem oito configurações na amostra de pesagem com freqüência
considerada significativa, o CORSIM, dentro de suas limitações, permite ao usuário
especificar no máximo quatro categorias de caminhões para serem utilizadas
durante a simulação. Então, foi necessário adotar um critério de agrupamento das
configurações observadas. À exemplo do trabalho desenvolvido por Cunha et al.
(2005), o critério adotado foi a similaridade das distribuições acumuladas da relação
peso/potência. A Tabela 4 apresenta o agrupamento das configurações em apenas
quatro categorias, para fins de simulação.
Tabela 3: Configurações de eixos observadas nas balanças
Eixos
Configuração
Nomenclatura
Amostra
2C
1.881
30,08%
3C
1.809
28,93%
2S1
39
0,62%
2S2
206
3,29%
2S3
1.527
24,42%
2I3
71
1,14%
6
3S3
413
6,61%
7
3T4
243
3,89%
64
1,02%
Total 6.253
100,00%
2
Freqüência relativa
3
4
5
Outros
–
32
Transporte em Transformação XI
Tabela 4: Agrupamento das configurações observadas
e respectivos valores típicos para relação peso/potência
Categoria
Eixos
Configurações
Veículo típico
Leves
2
2C
Médios
3e4
3C, 2S1 e 2S2
Pesados
5e6
Extra-pesados
7 ou mais
Peso/potência (kg/kW)
Média
Mediana
Ford F-4000
67
64
Mercedes-Benz L1620
110
98
2S3, 2I3 e 3S3
Scania 113H
126
144
3T4
Volvo FH12
173
200
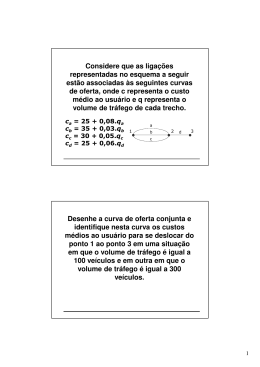
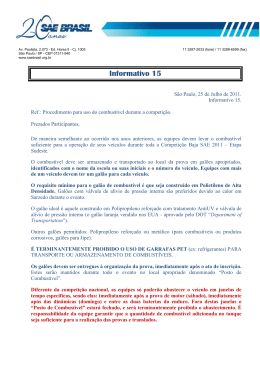
A Figura 1 apresenta as distribuições acumuladas da relação peso/potência
para as categorias agrupadas. Observa-se que cada uma das distribuições possui
um perfil bem definido, principalmente aquelas das categorias de caminhões leves
e extra-pesados. Apesar de as demais distribuições mostrarem perfis semelhantes
até aproximadamente o 30º percentil, a partir desse ponto cada uma delas segue um
perfil distinto, justificando a escolha de tais categorias.
De posse da configuração de eixos, marca e modelo do caminhão, foi feito
um levantamento detalhado de suas características. Esse levantamento visou não
somente o conhecimento da potência nominal dos veículos (como citado anteriormente), como também o conhecimento de todas as distâncias entre eixos existentes.
A obtenção das distâncias entre eixos é considerada fundamental para a realização
do estudo de caso proposto nesta pesquisa.
A tarefa de obter a distância entre eixos dos 22 tipos de configurações observadas nas balanças consistiu em um trabalho minucioso, visto que existe uma
grande variedade nos padrões estabelecidos por cada fabricante e mesmo entre modelos de um mesmo fabricante. Outro fator importante é que os veículos articulados
podem utilizar carrocerias de uma grande variedade de fabricantes e com diferentes
finalidades, cada um adotando um padrão diferente de distâncias entre eixos. Dentre os principais fabricantes de carrocerias pesquisados, aquele que apresentou dados mais completos das características técnicas de seus produtos foi a Randon S/A.
Dessa forma, esta pesquisa considerou que toda a amostra de veículos articulados
utilizava carrocerias desse fabricante. É importante destacar que as imagens gravadas nas balanças foram usadas para que pudessem ser feitas considerações sobre o
tipo de carga transportada por cada veículo e, assim, associar o modelo da carroceria que mais se aproximasse da realidade. O banco de dados é então composto
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
33
pela configuração, marca/modelo, distância entre eixos e peso por eixos de todos os
6.253 veículos pesados observados nas balanças.
Freqüência Acumulada
100%
80%
60%
Leves
40%
Médios
Pesados
20%
Extra-pesados
0%
0
25
50
75
100
125
150
175
200
225
250
275
300
325
350
Relação Peso/Potência (kg/kW)
Figura 1: Distribuição acumulada da relação peso/potência
(categorias agrupadas)
7. Calibração e Calidação do Corsim
Todo simulador possui parâmetros de calibração que podem ser ajustados
pelos usuários e que contém inicialmente valores default sugeridos pelos seus
desenvolvedores. Entretanto, somente em raras circunstâncias esses modelos são
capazes de produzir bons resultados para um caso específico usando os valores
default. O usuário deve sempre realizar uma calibração para assegurar que o
modelo codificado reproduz com fidelidade as condições de tráfego locais e o
comportamento dos motoristas.
A validação é uma etapa pós-calibração que tem como objetivo verificar a
validade dos valores dos parâmetros encontrados na fase de calibração. A validação
consiste no processo de determinar se o modelo pode representar de forma acurada
as medidas de campo para diferentes cenários. Para isso, ela deve usar um conjunto
de dados diferente daquele utilizado para a calibração do modelo (Zhang e Owen,
2004).
34
Transporte em Transformação XI
Devido ao grande número de parâmetros a ser ajustado nos simuladores
de tráfego, o processo de calibração pode tornar-se bastante complexo. Por
isso, técnicas de otimização vêm sendo empregadas visando a minimização
desse esforço. Dentre elas, pode-se citar os algoritmos genéticos, que realizam
a calibração de vários parâmetros simultaneamente para diminuir a discrepância
entre o sistema real e o modelo simulado. O uso de um algoritmo genético requer
a codificação dos parâmetros de calibração. Apesar de existirem vários esquemas
de representação possíveis, a codificação dos genes dos cromossomos na forma
binária (bits) ainda é a preferida pela maioria dos pesquisadores, uma vez que
ela apresenta uma representação do problema de forma mais simplificada. Um
programa computacional baseado em um algoritmo genético foi desenvolvido para
calibrar o CORSIM no trecho de rodovia de pista dupla estudado. O programa foi
desenvolvido na linguagem Perl.
No CORSIM, foram identificados vários parâmetros de entrada que podem
ser modificados para melhor reproduzir as condições de tráfego locais. A fim de evitar um gasto desnecessário de tempo na calibração de parâmetros que produzem pequeno impacto nos resultados da simulação, é mais conveniente que se faça ajuste
apenas nos parâmetros mais significativos. Além disso, em um algoritmo genético
o tamanho da seqüência binária é proporcional ao número de parâmetros codificados em cada cromossomo e, quanto maiores as seqüências binárias, maiores são as
necessidades computacionais. Portanto, apenas os parâmetros mais significativos
devem ser usados, com o intuito de permitir que a calibração seja alcançada dentro
do mínimo de gerações possível. Através de uma análise de sensibilidade, foram
determinados que os parâmetros de calibração utilizados neste trabalho seriam os
apresentados na Tabela 5.
Tabela 5: Parâmetros selecionados para a calibração do CORSIM
Parâmetro
P1 – P10
P11
P12
P13
P14
P15
P16
P17
P18
P19
Descrição
Fator de sensibilidade para o car-following (motoristas do tipo 1 ao 10)
Constante de Pitt para o car-following
Tempo de reação para acelerar
Tempo de reação para desacelerar
Tempo para completar uma mudança de faixa
Tempo mínimo para geração de veículos
Aceitação de gap para mudança de faixa obrigatória
% de motoristas que cedem o direito de passagem para veículos mudando de faixa
Multiplicador para o desejo de realizar uma mudança de faixa arbitrária
Desaceleração máxima do veículo líder percebida pelo seu seguidor
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
35
Para executar uma calibração fazendo uso de um algoritmo genético, devem
ser especificados o número de cromossomos, o número máximo de gerações e as
probabilidades de cruzamento e de mutação. O tempo de processamento pode restringir a utilização de combinações grandes de número de cromossomos versus
número máximo de gerações. Portanto, vários testes foram realizados com o objetivo de obter uma combinação que fornecesse uma boa convergência do MAER. A
combinação escolhida para a calibração foi a de 100 cromossomos e 200 gerações.
As probabilidades de cruzamento (Pc) e de mutação (Pm) adotadas foram de
50% e 20%, respectivamente. Esses valores foram determinados a partir de uma
análise de sensibilidade, que testou diversas combinações em que Pc e Pm variavam
de 10% a 50%, com incrementos de 10%. Esses intervalos de variação foram
fundamentados nos experimentos realizados por Kim e Rilett (2001). A função
fitness utilizada nesta pesquisa é a apresentada na Equação 1, sendo as constantes
dela as mesmas adotadas por Egami et al. (2004) e Schultz e Rilett (2005):
−5 MAER )
(1)
F = 100 e (
em que: F:
fitness; e
MAER: erro médio absoluto percentual (Mean Absolut Error Ratio).
Na calibração, o MAER foi calculado em função das duas medidas de desempenho escolhidas (fluxo e velocidade média) em seis pontos de controle ao
longo da rede de tráfego, três em cada sentido. Os dados utilizados na calibração
foram os observados na primeira e segunda coleta de dados (realizadas nos dias 6 e
13/6/2005), perfazendo um total de cinco horas.
O MAER calculado antes da calibração do simulador, ou seja, com os
parâmetros default do CORSIM é de 9,11% e, após as 200 gerações, esse valor foi
reduzido para 6,32%. O valor do fitness calculado com os parâmetros default do
CORSIM é 63,41. Ao final da calibração, esse valor chegou a 72,89, sendo que o
valor máximo é 100. Esses valores indicam que a calibração reduziu o MAER em
2,79%, o que representa uma redução relativa do erro médio de aproximadamente
30%. Paralelamente, o fitness aumentou em 9,48.
A validação foi realizada usando um conjunto de dados diferente daquele
utilizado na calibração do CORSIM. A adoção do critério utilizado para separar os
dados para calibração e validação de um modelo é arbitrária. O conjunto de dados
36
Transporte em Transformação XI
usado na validação foi o observado na terceira coleta de dados, que compreendeu
três horas e foi realizada em 1/7/2005. Estes dados apresentaram características
operacionais diferentes dos observados nas outras coletas, com fluxos de tráfego
superiores. Nessa coleta de dados, foi adicionado um posto de controle em cada
sentido de tráfego, ou seja, o total de postos de controle passou a ser oito.
A validação envolve a aplicação do modelo de simulação com o uso dos parâmetros encontrados na fase de calibração. Ela serve para verificar se os resultados
da representação de diferentes condições de tráfego são confiáveis. Na validação,
executa-se uma simulação empregando a mesma seqüência de número aleatórios
utilizadas na calibração. A importância de simular com a mesma seqüência reside
no fato de que se deseja reproduzir as mesmas condições de tráfego encontradas na
calibração, já que a seqüência de números aleatórios está relacionada aos processos
estocásticos de tomada de decisão envolvidos na simulação.
O MAER calculado antes da calibração do simulador, ou seja, com os
parâmetros default do CORSIM é de 9,11% e, após as 200 gerações, esse valor foi
reduzido para 6,32%. O valor do fitness calculado com os parâmetros default do
CORSIM é 63,41. Ao final da calibração, esse valor chegou a 72,89, sendo que o
valor máximo é 100. Esses valores indicam que a calibração reduziu o MAER em
2,79%, o que representa uma redução relativa do erro médio de aproximadamente
30%. Paralelamente, o fitness aumentou em 9,48.
A validação foi realizada usando um conjunto de dados diferente daquele
utilizado na calibração do CORSIM. A adoção do critério utilizado para separar os
dados para calibração e validação de um modelo é arbitrária. O conjunto de dados
usado na validação foi o observado na terceira coleta de dados, que compreendeu
três horas e foi realizada em 1/7/2005. Estes dados apresentaram características
operacionais diferentes dos observados nas outras coletas, com fluxos de tráfego
superiores. Nessa coleta de dados, foi adicionado um posto de controle em cada
sentido de tráfego, ou seja, o total de postos de controle passou a ser oito.
A validação envolve a aplicação do modelo de simulação com o uso dos
parâmetros encontrados na fase de calibração. Ela serve para verificar se os resultados
da representação de diferentes condições de tráfego são confiáveis. Na validação,
executa-se uma simulação empregando a mesma seqüência de número aleatórios
utilizadas na calibração. A importância de simular com a mesma seqüência reside
no fato de que se deseja reproduzir as mesmas condições de tráfego encontradas na
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
37
calibração, já que a seqüência de números aleatórios está relacionada aos processos
estocásticos de tomada de decisão envolvidos na simulação.
O MAER foi calculado na validação com as mesmas medidas de desempenho
da calibração. O valor calculado para a validação foi de 6,58%, ligeiramente superior
ao valor obtido na calibração (6,32%), apesar da inclusão de mais dois postos de
controle. Esse resultado comprova que os parâmetros calibrados são válidos para
uso em um conjunto de dados com características diferentes. A diferença entre o
MAER da validação e da calibração é julgada inexpressiva.
8. Estudo de Caso
Uma vez obtida uma versão calibrada do CORSIM, capaz de reproduzir as
condições de tráfego observadas em campo, procedeu-se a um estudo de caso em
que se buscou estabelecer o efeito do tráfego dos veículos pesados sobre uma ponte.
O propósito foi demonstrar como os dados sobre o carregamento móvel obtidos a
partir da simulação microscópica de uma rede de tráfego podem ser usados em seu
dimensionamento. No estudo de caso, foram considerados dois cenários de tráfego e
o efeito analisado foi o momento fletor máximo positivo ocasionado pela presença
simultânea de veículos pesados, a fim de fazer uma comparação com aquele provocado
pelo veículo-tipo e a carga uniformemente distribuída estabelecidos na NBR-7188.
Essa ponte é hipotética e está localizada em um dos tramos da rede simulada.
A escolha dos cenários simulados no estudo de caso deu-se em função da vida
útil de projeto das pontes, que, em geral, é de 50 anos para pontes de concreto. Eles
foram definidos com o intuito de demonstrar a metodologia proposta nesta pesquisa
e não têm a pretensão de prever as alterações das características da corrente de
tráfego ao longo do tempo. Os cenários foram assim estabelecidos: 1) crescimento
do fluxo de tráfego atual a uma taxa de 2% ao ano para um período de 50 anos,
mantendo a composição do tráfego obtida nas coletas de dados (27% de caminhões);
e 2) crescimento do fluxo de tráfego atual a uma taxa de 2% ao ano para um período
de 50 anos, modificando a composição do tráfego para contemplar uma participação
de 50% da frota de veículos pesados. O cálculo do crescimento do tráfego foi feito
admitindo uma progressão geométrica e o fluxo diário de tráfego atual foi definido
como o observado no dia da segunda coleta de dados, obtido através de sensores
automáticos instalados no pavimento pela concessionária que administra o trecho.
38
Transporte em Transformação XI
O tramo escolhido para representar a ponte está localizado no sentido Norte
da rede e o único aspecto considerado na sua escolha foi a sua posição em relação ao
ponto de início da rede, pois um tramo localizado muito próximo da entrada da rede
sofreria uma grande influência do processo de geração de veículos do simulador de
tráfego e pouca influência do car-following e da mudança de faixa, o que não seria
desejável. Dessa forma, o tramo escolhido está situado a uma distância aproximada
de 2 km do início da rede e possui extensão de 100 m. Neste trabalho, considera-se
que a ponte é simplesmente apoiada, apesar de, na prática, vãos maiores que 50 m
dificilmente serem empregados em pontes com esse sistema estrutural.
Diante da necessidade de obter dados microscópicos da simulação, verificouse que o arquivo padrão de saída do CORSIM não poderia ser utilizado, já que
ele contém apenas relatórios globais e esse tipo de informação não atende aos
propósitos desta pesquisa. Nesse caso, a fim de obter dados individuais de cada
veículo simulado, foi usado um outro arquivo de saída, o TSD, que é um arquivo
de resultados binário gerado pelo CORSIM em que são escritas a cada segundo de
simulação diversas informações sobre cada um dos veículos. Para ler o arquivo
TSD, foi desenvolvida uma macro escrita na linguagem VBA.
Em síntese, a macro busca em um determinado tramo da rede os segundos em
que ocorrem a presença dos veículos do tipo 3 a 6 (que representam os caminhões no
CORSIM). Aqui, o tramo de interesse é o que representa a ponte. Para os instantes
em que se verifica a existência de caminhões no tramo, são extraídos os números de
identificação dos veículos (ID), os tipos de veículos (3, 4, 5 e 6), as faixas de tráfego
em que eles se encontram naquele instante (faixa 1 ou 2) e suas posições nessas
faixas. Apesar da possibilidade de existência de automóveis ou ônibus juntamente
com os caminhões, eles não são levados em conta neste trabalho porque não chegam
a produzir solicitações suficientes para causar danos às pontes (Loriggio, 1993).
A macro associa o tipo de veículo extraído do CORSIM ao banco de dados
obtido das pesagens nas balanças. Essa associação é feita através de análises
probabilísticas com a geração de números aleatórios. Nelas são definidas a
configuração de eixos, a marca/modelo e os pesos por eixo de cada caminhão, com
suas respectivas distâncias entre eixos.
Para a análise do efeito do tráfego dos caminhões sobre a ponte foi preciso obter
a carga móvel determinada na norma brasileira e a gerada pelas simulações. Para
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
39
isso, foi usado o FTOOL, um programa que se destina à análise do comportamento
estrutural de pórticos planos.
Segundo a NBR-7188, em pontes rodoviárias, a carga móvel é constituída por
um veículo-tipo e por cargas q e q’ uniformemente distribuídas. Enquanto a carga q
procura levar em consideração a existência de outros veículos na ponte, a carga q’
tenta reproduzir a ação de multidão (ABNT, 1984). Neste trabalho, considera-se que
a ponte é da classe 45, o que implica que a carga q tem valor de 5 kN/m2. Essa carga
deve ser aplicada nas faixas de tráfego e nos acostamentos, deduzindo-se apenas a
área ocupada pelo veículo-tipo. A carga q’, que possui valor de 3 kN/m2 para todas
as classes de ponte e é aplicada nos passeios, não foi considerada nesta pesquisa. A
razão para tal reside no fato de que o efeito provocado por ela seria o mesmo para as
situações de carregamento móvel da norma e carregamento móvel das simulações.
O tabuleiro considerado para a ponte foi de 8,20 m, ou seja, duas faixas de
tráfego com 3,60 m cada e um acostamento com 1 m. A largura do tabuleiro é levada
em conta no cálculo da carga q. Para a ponte simplesmente apoiada, o veículo-tipo,
com suas três cargas concentradas de 150 kN cada uma, é posicionado no meio do
vão. Essa localização representa o caso mais crítico para o cálculo do momento
fletor. O peso total do trem-tipo para esse vão é de 4.460 kN e o momento fletor
máximo provocado tem valor de 6.009 kN.m.
O carregamento móvel gerado pelos veículos simulados corresponde às
cargas por eixo dos caminhões e suas localizações na ponte, obtidas com o uso da
macro. Nesse caso são considerados apenas os pesos dos eixos efetivamente sobre
a ponte. Vale lembrar que uma vez que se obtém toda a distribuição de cargas sobre
a ponte, que poderia ser chamada de um trem-tipo representativo, não é necessária
a consideração da carga q, já que ela é admitida na norma para reproduzir as
solicitações provocadas por outros veículos na ponte além do veículo-tipo.
Devido à alta freqüência das probabilidades de ocorrência de algumas
quantidades de caminhões sobre a ponte, optou-se por fazer a análise do efeito
provocado pela presença de múltiplos caminhões apenas para os três maiores
carregamentos totais das três maiores quantidades verificadas para cada cenário
simulado. Entende-se que, de forma geral, os maiores carregamentos levam à análise
dos casos mais críticos. No Cenário 1, foi observado um máximo de 10 caminhões
simultaneamente sobre a ponte. No Cenário 2, esse valor chegou a 12.
40
Transporte em Transformação XI
Os dados obtidos indicam que o carregamento máximo foi verificado no
Cenário 2 com a presença simultânea de 10 caminhões sobre a ponte. O valor desse
carregamento é de 2.843 kN, que representa 63,74% do peso do trem-tipo normativo.
O momento mais crítico foi ocasionado por esse mesmo carregamento. Seu valor é
4.082 kN.m, correspondente a 67,93% do causado pelo trem-tipo normativo.
Um dado interessante é que o menor momento obtido é ocasionado pela
presença de 12 caminhões no Cenário 2. Esse resultado indica que o número de
caminhões na ponte, que a princípio pode ser visto como um fator crítico, não é
predominante no cálculo do momento fletor. A razão para isso decorre do fato de
que quanto maior o número de caminhões, menores e mais leves eles tendem a ser,
implicando em menos eixos e carregamentos totais menores.
9. conclusões
A calibração do CORSIM fez com que o erro médio do simulador fosse
reduzido de 9,11% para 6,32%. Essa redução relativa de aproximadamente 30% é
considerada significativa e demonstra a eficiência do uso de um algoritmo genético
para a calibração de um modelo de simulação. O processo de validação comprovou
que os parâmetros obtidos na calibração poderiam ser usados para outro conjunto
de dados com características distintas.
O método de obtenção de um carregamento móvel através de um simulador
de tráfego se mostra viável e adequado, uma vez que incorpora um modelo de
car-following para representar o posicionamento dos veículos sobre as pontes.
Apesar da necessidade de agregar veículos com características similares para fins
de simulação (devido a uma limitação do CORSIM), a análise probabilística a partir
da geração de números aleatórios torna possível a desagregação dos dados de uma
maneira que não compromete os resultados obtidos.
Apesar de o estudo de caso ter sido realizado para a análise estrutural de uma
ponte, o método de obtenção do carregamento móvel desenvolvido nesta tese pode
ser adaptado para aplicação no dimensionamento de pavimento, outro componente
da infra-estrutura rodoviária. É importante ressaltar também que, embora tenha sido
feita a análise de um único vão em um sistema estrutural específico, a metodologia
desenvolvida pode ser aplicada para vãos de quaisquer magnitude e sistema
estrutural.
Análise do efeito do tráfego de veículos pesados sobre uma ponte através de simulação microscópica
41
Agradecimentos
Os autores agradecem o apoio financeiro para o desenvolvimento desta pesquisa
fornecido pela CAPES e pelo CNPq. O algoritmo para calibração do CORSIM foi
parcialmente desenvolvido durante estágio sanduíche na Texas A&M University,
com a colaboração do Prof. Laurence Rilett, cujo apoio os autores agradecem. Os
autores agradecem também as sugestões e o apoio fornecidos pelo Prof. Mounir
Khalil El-Debs (SET-EESC-USP) e pelo Dr. Luciano Maldonado Ferreira durante
o desenvolvimento do estudo de caso.
42
Transporte em Transformação XI
Referências bibliográficas
ABNT (1984). NBR 7188 – Carga Móvel em Ponte Rodoviária e Passarela de Pedestres. Rio de Janeiro.
CONFEDERAÇÃO NACIONAL DO TRANSPORTE (2006). Boletim estatístico
da CNT. Disponível em: <http://www.cnt.org.br>. Acesso em: 30 dez. 2006.
CRESPO-MINGUILLÓN, C.; CASAS, J. R. (1997). A comprehensive traffic load
model for bridge safety checking. Structural Safety, v.19, n.4, p.339-359.
CUNHA, A. L. B. N.; MON-MA, M. L.; ARAÚJO, J. J.; EGAMI, C. Y.; SETTI,
J. R. A. (2005). Caracterização da frota de caminhões no sistema AnhangueraBandeirantes. In: XIX CONGRESSO DE PESQUISA E ENSINO EM TRANSPORTES, 2005, Recife. Anais... 1 CD-ROM.
DNIT (2006). Manual de estudos de tráfego. Versão preliminar. Departamento Nacional de Infra-Estrutura de Transportes, Ministério dos Transportes, Brasil.
EGAMI, C. Y.; SETTI, J. R. A; RILETT, L. R. (2004). Algoritmo genético para
calibração automática de um simulador de tráfego em rodovias de pista simples.
Transportes, Rio de Janeiro, v.12, n.2, p.5-14.
GHOSN, M.; MOSES, F. (1985). Markov renewal model for maximum bridge loading. ASCE Journal of Engineering Mechanics, v.111, n.9, p.1093-1104.
KIM, K.; RILETT, L. R. (2001). Genetic-algorithm-based approach for calibrating
microscopic simulation models. In: IEEE INTELLIGENT TRANSPORTATION
SYSTEMS CONFERENCE, 2001, Oakland. Proceedings… 1 CD-ROM.
LORIGGIO, D. D. (1993). Contribuições para a normalização da fadiga na revisão
da norma NB1/93. III Simpósio EPUSP sobre Estruturas de Concreto, Universidade de São Paulo, São Paulo, p. 293-322.
LUCHI, L. A. R. (2006). Reavaliação do trem-tipo à luz das cargas reais nas rodovias brasileiras. 257p. Tese (Doutorado) – Escola Politécnica, Universidade de
São Paulo, São Paulo, 2006.
NOWAK, A. S.; HONG, Y. K. (1991). Bridge live-load models. Journal of Structural Engineering, v.117, n.9, p.2757-2767, set.
SCHULTZ, G. G.; RILETT, L. R. (2005). Calibration of distributions of commercial motor vehicles in CORSIM. Journal of the Transportation Research Board 1934, Transportation Research
Board of the National Academies, Washington, p.246-255.
ZHANG, Y.; OWEN, L. E. (2004). Systematic validation of a microscopic traffic simulation program. In: 83rd ANNUAL MEETING OF THE TRANSPORTATION RESEARCH BOARD,
2004, Washington. Proceedings... 1 CD-ROM.
Resolução de Problemas de
Transporte com Diagramas
de Voronoi
2
Antonio Galvão Novaes
Departamento de Engenharia de Produção e Sistemas
Universidade Federal de Santa Catarina
Resumo
Problemas de localização de facilidades numa região são freqüentes na
literatura. Nos problemas de zoneamento, por outro lado, o objetivo é dividir o
território em sub-regiões menores, denominadas distritos ou zonas, de forma
a otimizar uma determinada função objetivo e garantindo certas condições de
balanceamento da demanda, de contigüidade, e soluções compactas. Embora
diversos problemas de localização e de zoneamento têm sido tratados de forma
discreta, agrupando áreas elementares em distritos com o auxílio de um modelo
matemático, o atual estágio da computação tem permitido a utilização de modelos
contínuos, com aproximações baseadas na distribuição da demanda sobre a região
44
Transporte em Transformação XI
e não nas informações específicas de cada unidade a ser atendida. Diagramas
de Voronoi podem ser utilizados com sucesso na resolução de problemas de
localização e zoneamento desse tipo. São apresentados, neste artigo, os principais
contornos teóricos e práticos do assunto, seguidos de uma aplicação a um problema
de transporte.
Abstract
Facility location problems over a region are frequent in the literature. In
districting problems, on the other hand, the aim is to partition a territory into smaller
units, called districts or zones, while an objective function is optimized and some
constraints are satisfied, such as balance, contiguity, and compactness. Although
many location and districting problems have been treated by assuming the region
previously partitioned into a large number of elemental areas and further aggregating
these units into districts with a mathematical programming model, continuous
approximation, on the other hand, is based on the spatial density of demand, rather
than on precise information on every elementary unit. Voronoi diagrams can be
successfully used in association with continuous approximation models to solve
location-districting problems, specially transportation and logistics applications.
We discuss in the paper the main theoretical and practical elements associated to
this subject, followed by an application to a transportation problem.
1. Introdução
A grande maioria de problemas de transporte e de logística envolve relações
espaciais, sejam elas de divisão de território (definição de zonas de tráfego, por
exemplo), localização de facilidades (estações de metrô, depósitos, centros de
distribuição de mercadorias, pontos de transbordo, etc.), redes de transporte,
etc. Muitos problemas apresentam formulação discreta, mas com os avanços da
computação, modelos contínuos têm sido utilizados de forma crescente ( Langevin
et al., 1996; Novaes et al., 2000; Dasci e Verter, 2001; da Silva, 2004; Galvão
et al., 2006, Novaes et al., 2007 ), principalmente nas fases de planejamento de
novos sistemas de transporte e de logística. Neste trabalho vamos abordar, dentro
da formulação contínua, dois tipos de problemas bastante comuns na análise de
Resolução de Problemas de Transporte com Diagramas de Voronoi
45
sistemas de transportes e de logística, e apresentados de forma integrada: problemas
de localização de facilidades e problemas de zoneamento (districting).
Problemas de localização de facilidades (Drezner, 1995; Drezner e Hamacher,
2002) buscam determinar os locais ótimos para sediar instalações diversas de
forma a otimizar uma função objetivo, como, por exemplo, minimizar o custo de
transporte, maximizar a demanda atraída pelo serviço, além de outras. Esse tipo
de problema tem frequentemente natureza geométrica e combinatória. A literatura
técnica apresenta um grande número de aplicações: localização de estações de
metrô, de hospitais, escolas, depósitos, centros de distribuição, etc.
O objetivo dos problemas de zoneamento, por outro lado, é obter a partição
otimizada de um território em unidades menores, chamadas de distritos, bolsões,
ou zonas, obedecendo algumas restrições. Uma parte dessas restrições reflete
basicamente critérios de bom senso. Uma delas procura equilibrar a demanda entre
os distritos. Além disso, os distritos ou zonas devem ser contíguos e geograficamente
compactos (Williams, 1995; Mehotra et al., 1998). Outras restrições refletindo
a natureza específica do problema são normalmente adicionadas ao modelo.
Problemas de zoneamento são freqüentes em diversas aplicações práticas. Por
exemplo, zoneamento escolar (Schoepfle et al., 1991), definição de distritos
policiais (D’Amico et al., 2002), divisão de território para vendedores (Zoltners e
Sinha, 1983), são exemplos típicos. No caso específico de transporte e logística são
encontradas também diversas aplicações na literatura técnica: definição de distritos
para aplicação de sal em redes urbanas (Muyldermans et al., 2002), distribuição
espacial de clientes de centros de distribuição (Zhou et al., 2002), definição de
zonas de entrega para veículos de distribuição de produtos (Dasci e Verter, 2001;
Novaes et al., 2000; Galvão et al., 2006, Novaes et al., 2007), etc.
Uma forma de resolver problemas de zoneamento é partir de uma divisão
prévia do território em pequenas áreas e agrupá-las para gerar um certo número de
distritos, de forma a otimizar uma função objetivo, obedecendo algumas restrições
(William, 1995; Mehrotra et al., 1998). Já nos problemas com formulação contínua,
o espaço subjacente é representado por variáveis contínuas e a análise é baseada
na distribuição aproximada da demanda sobre a região e não nas informações
específicas de cada unidade a ser atendida (Langevin et al, 1996; Galvão et al.,
2006).
46
Transporte em Transformação XI
A associação de técnicas de aproximação contínua com diagramas de Voronoi
permite resolver uma série de problemas da vida real. Especificamente, aplicações
de diagramas de Voronoi não ordinários têm sido apresentados na literatura (Suzuki
e Okabe, 1995; Boots et al., 1997; Okabe et al., 2000; Galvão et al., 2006, Novaes
et al., 2007). Boots et al. (1997) utilizaram diagrama de Voronoi com pesos
multiplicativos para definir áreas de competição no comércio varejista. Galvão et
al. (2006) desenvolveram modelo matemático incorporando diagrama de Voronoi
com pesos multiplicativos para resolver um problema de distribuição urbana de
carga parcelada. Esse mesmo problema foi resolvido considerando a existência de
barreiras no processo de criação dos distritos (da Silva, 2004).
O objetivo deste artigo é descrever e analisar modelos de localização e/ou
zoneamento aplicados à solução de problemas de transporte, combinando diagramas
de Voronoi com algoritmos de otimização. Na Seção 2 é apresentado um resumo
dos conceitos básicos e propriedades sobre diagramas de Voronoi de interesse
para a solução de problemas de transportes e logística. A Seção 3 aborda aspectos
computacionais ligados à construção prática de diagramas de Voronoi. Na Seção 4,
por sua vez, é apresentada em detalhe uma aplicação na área de transporte urbano.
Finalmente, na Seção 5, são apresentadas as conclusões.
2. Diagramas de Voronoi
Diagramas de Voronoi, de interesse para nosso estudo, são definidos no plano
( R ), embora também sejam analisados noutras dimensões. O conceito básico
de diagrama de Voronoi é bastante simples (Aurenhammer, 1991; Okabe et al.,
2
2000): dado um conjunto de pontos distintos P ≡ {P1 , P2 ,..., Pm } num espaço
contínuo, procura-se associar todos os demais pontos desse espaço com o membro
mais próximo do conjunto P (aqui a distância está ligada a uma métrica específica,
cujas várias formulações serão sumarizadas adiante). O conjunto fechado de m
pontos constitui o conjunto gerador do diagrama de Voronoi, representado por
P ≡ {P1 , P2 ,..., Pm } , com m ≥ 2.
Resolução de Problemas de Transporte com Diagramas de Voronoi
47
Sendo m( X , Y ) a variável que exprime a distância entre dois pontos numa
métrica apropriada, e sendo X,Y∈ R 2 pontos do plano, o diagrama de Voronoi é
definido matematicamente por
V ( Pi ) = { X ∈ R
2
| m( X , Pi )
≤ m(X , Pj ) ,
j = 1,..., m }
(1)
O exemplo clássico é o diagrama de Voronoi ordinário, em que a distância
entre dois pontos é a Euclidiana, com m( X , Y ) = X − Y , com as sub-regiões
resultantes formadas por polígonos convexos (Figura 1a).
Figure 1 - Diagrama de Voronoi ordinário e com pesos multiplicativos
Há situações em que a distância Euclidiana não representa bem o processo de
atração dos pontos geradores. Por exemplo, suponhamos que os seis pontos geradores
mostrados na Figura 1b sejam lojas de varejo vendendo um mesmo tipo de produto.
Suponhamos adicionalmente que, além da distância, a atração das lojas depende de
uma série de atributos refletidos nos pesos mostrados na Figura 1b. Para representar
adequadamente esse tipo de inter-relação, diversos tipos de diagrama de Voronoi
foram desenvolvidos. Um deles é o diagrama de Voronoi com pesos multiplicativos
(Voronoi-PM), representado pela seguinte métrica (Okabe et al., 2000)
m( X , Pi ) =
1
wi
X − Pi ,
(2)
48
Transporte em Transformação XI
onde wi (i = 1, 2,..., m) representa um conjunto de pesos estritamente
positivos. Para o caso de dois pontos geradores, o lugar comum dos pontos do
plano que satisfazem (2) é o cículo de Apolônio (Okabe et al., 2000), exceto quando
w1 = w2 , quando o bissetor se torna uma reta. A Figura 1b mostra um exemplo de
diagrama de Voronoi-PM, para os pesos mostrados no gráfico. De uma forma geral,
a região resultante não é necessariamente convexa ou conectada, podendo inclusive
apresentar espaços vazios (Okabe et al., 2000). Por essa razão, cuidado especial
deve ser tomado ao se desenvolver modelos iterativos computacionais envolvendo
Voronoi-PM. Caso contrário, o processo computacional pode não convergir ou pode
gerar soluções não realistas (Galvão et al., 2006).
De forma análoga, o diagrama de Voronoi com pesos aditivos (Voronoi-PA) é
representado por (Okabe et al., 2000)
m( X , Pi ) =
X − Pi − wi .
(3)
Aqui, o sinal de wi não é restritivo, podendo ser positivo ou negativo
dependendo do problema. Considerando dois pontos geradores Pi e Pj, o bissetor
associado ao diagrama de Voronoi-PA é um segmento de uma curva hiperbólica
com focos em Pi e Pj, ou um segmento de reta em casos particulares (Okabe et al.,
2000). Há também o diagrama de Voronoi com pesos combinados (Voronoi-PC),
representado por
m( X , Pi ) =
1
X − Pi − wi 2 ,
wi1
(4)
Onde o sinal de wi 2 também não é restrito a valores positivos. Para este tipo de
diagrama de Voronoi, os limites das sub-divisões são representados por uma função
polinomial de grau quatro, com forma geométrica bastante complexa (Okabe et al.,
2000). Finalmente, o diagrama de Voronoi de potência (Voronoi-PT) é definido da
seguinte forma
m( X , Pi ) =
2
X − Pi − wi (5)
Resolução de Problemas de Transporte com Diagramas de Voronoi
49
Para este caso os limites das sub-regiões geradas pelos pontos geradores Pi e
Pj é um segmento de reta perpendicular ao segmento ligando os pontos Pi e Pj , e
passando pelo ponto X ij* dado por (Okabe et al., 2000)
X
*
ij
=
Pj
2
2
− Pi + wi − w j
2 Pj − Pi
2
( Pj − Pi ) ,
(6)
Uma propriedade importante do diagrama de Voronoi-PT, bastante útil nas
aplicações, é que as sub-regiões são polígonos convexos. Esse tipo de diagrama de
Voronoi é especialmente indicado para solução de problemas com barreiras impostas
por vias expressas, rios, lagos, grandes parques, montanhas, etc. Para problemas
com barreiras, a métrica para medir as distâncias é mais elaborada (Okabe et al.,
2000; da Silva, 2004). Se um obstáculo ou barreira está colocado na linha reta
entre uma origem e um destino, torna-se necessário realizar um desvio em torno do
obstáculo. A métrica adotada, neste caso, é a da distância visível mais curta (Okabe
et al., 2000; da Silva, 2004).
3. Aspectos Computacionais
A pesquisa científica em geometria computacional vem atraindo grande
interesse nos últimos anos (Preparata e Shamos, 1975; Hoff III et al., 2000), cobrindo
diversas áreas de informática, como, por exemplo, jogos computacionais, projeto
assistido por computador, robótica, reconhecimento de padrões, etc. Em particular,
também cresceu muito o interesse por diagramas de Voronoi (Aurenhammer, 1991,
Hoff III et al., 2000). Os enfoques atualmente utilizados para a construção de
diagramas de Voronoi são métodos combinatórios, técnicas incrementais, métodos
de divisão e conquista (divide-and-conquer), e métodos aproximados, destacandose a técnica plane-sweep (Fortune, 1987; Aurenhammer, 1991) e a técnica quadtree (Samet, 1988).
A técnica plane-sweep foi desenvolvida por Fortune (1987) e se destaca pela sua
concepção e simplicidade computacional. Uma interessante demonstração prática
desse método pode ser encontrado em < www.diku.dk/hjemmesider/ studerende/duff/
50
Transporte em Transformação XI
Fortune/ >. O método plane-sweep é bastante eficaz para a construção de diagramas
de Voronói do tipo ordinário e com pesos aditivos, mas não resolve problemas com
pesos multiplicativos e problemas com barreiras. Por essa razão utilizamos na nossa
pesquisa a técnica quad-tree (Samet, 1988), que se aplica igualmente a todos os
tipos de diagramas de Voronoi de interesse.
A técnica quad-tree (Samet, 1988) é um processo computacional para
representação de imagens baseado na sucessiva sub-divisão da figura em quadrantes,
seguindo uma estrutura hierárquica de dados. Suponha, por exemplo, que se deseja
definir graficamente um bissetor de um diagrama de Voronoi qualquer, bissetor esse
que separa dois distritos adjacentes i e j (Figura 2a).
Aqui os quadrantes são quadrados, mas podem também ser retângulos.
Em cada estágio do processo (representado pelos diversos níveis na Figura 2b),
cada vértice do quadrante é examinado, determinando-se qual o ponto gerador do
diagrama de Voronoi mais próximo a ele. Podem ocorrer duas situações: (a) os
quatro vértices do quadrante têm um mesmo ponto gerador como elemento mais
próximo; (b) pelo menos um dos vértices é associado a um ponto gerador diferente
dos demais. Uma função simples FQ é definida: (a) FQ = i , se os quarto vértices do
quadrante Q estão relacionados com o mesmo ponto gerador i; (b) FQ = 0 , se uma
parte dos vértices do quadrante Q está relacionada com um ponto gerador i, e os
outros vértices estão relacionados com pontos geradores diferentes de i.
À medida que se avança nos níveis, forma-se uma árvore de grau 4, em
que a raiz (um quadrante) se abre em quatro elementos iguais representados
simbolicamente pelos quadrantes NW, NE, SW, e SE, obtidos pela sub-divisão da
raiz (Samet, 1988). É o que mostra a Figura 2. Os dados de cada quadrante são
colocados num arquivo contendo seis registros. Os primeiros cinco registros contêm
a identificação da raiz (quadrante pai) e dos quatro quadrantes gerados a partir dela
(quadrantes filhos). O sexto elemento registra o valor da função FQ . Por exemplo,
na obtenção do bissetor separando as sub-regiões i e j da Figura 2a, inicia-se com a
imagem plena inicial formada pelo quadrado ACEGA. Para o quadrante NW (ABIH
na Figura 2a) tem-se FQ = 0 , pois os vertices A, B, and H estão próximos do ponto
gerador i, enquanto o vértice I está próximo do ponto gerador j. Os quadrantes NE
e SW têm também FQ = 0 , mas, para o quadrante SE, tem-se FQ = j , já que seus
quatro vértices estão próximos do mesmo ponto gerador j.
Resolução de Problemas de Transporte com Diagramas de Voronoi
51
As seguintes regras são estabelecidas para o processo quadtree:
a) O processo de sub-divisão termina quando se encontra um sub-quadrante
tal que FQ = k (k ≠ 0) . Por exemplo, o quadrante SE (quadrado DEFI )
na Figura 2a.
b) O processo de sub-divisão prossegue enquanto FQ = 0 . Neste caso os
valores de FQ são determinados para os quarto sub-quadrantes gerados a
partir dele e registrados.
c) Quando a seqüência atinge um determinado nível de precisão préestabelecido, o processo quadtree termina.
A Figura 2b mostra a seqüência de codificação do processo quadtree
relacionado com o quadrante noroeste ABIHA da Figura 3a. Os nós circulares
em branco representam os quadrantes do tipo FQ = 0 . Os nós circulares pretos
indicam as células finais (dentro do nível de precisão desejado) que vão constituir
a curva bissetora procurada. No exemplo da Figura 2, apenas quatro níveis foram
examinados e, obviamente, o bissetor resultante é bastante impreciso, exigindo maior
detalhamento. Os nós quadrados, por sua vez, representam quadrantes terminais do
tipo FQ = k , com k ≠ 0 .
Figure 2 - A técnica quad-tree aplicada
à construção de um diagrama de Voronoi.
52
Transporte em Transformação XI
A técnica quad-tree leva a uma redução substancial do tempo de computação
na construção de diagramas de Voronoi não ordinários. De fato, os pontos que
formam as curvas bissetoras dos diagramas de Voronoi são esparsos sobre a região
plana de interesse e uma grande parte dos quadrantes serão do tipo FQ = k (k ≠ 0)
, nos vários níveis do processo. Essa situação geral leva a uma substancial redução
no processo de sub-divisão dos quadrantes. Em segundo lugar, quando a construção
do diagrama de Voronoi é completada, torna-se necessário determinar os valores
de diversas funções e de integrais para cada um dos distritos, e os quadrantes
resultantes, de tamanhos diversos, facilitam em muito essa tarefa. A técnica quadtree foi utilizada para construir os diagramas de Voronoi associados à aplicação
descrita na Seção 4.
4. Aplicação aos Transportes
Será apresentado nesta seção um exemplo de aplicação de diagrama de
Voronoi associado a um modelo de localização-alocação na área de transporte
urbano de pessoas. Outros problemas de transportes e de logística podem também
ser tratados com a mesma metodologia (da Silva, 2004; Galvão et al., 2006; Novaes
et al., 2007).
4.1 Descrição do problema
Diagramas de Voronoi são úteis para análise espacial e otimização de localização
de diversos problemas de transporte e de logística. Neste artigo é apresentado e
discutido um problema de localização de estações ao longo de um trecho de linha
de metrô. A localização ótima das estações de metrô e a alocação da demanda às
diversas estações são dois aspectos importantes relacionados com projetos desse
modo de transporte urbano (Hamacher et al., 2001; Saka, 2001; Laporte et al.,
2002, Novaes et al., 2007). Nesta seção é apresentada uma aplicação específica, na
qual os usuários se deslocam de suas origens para um terminal localizado no centro
da cidade (CBD), escolhendo como meio de transporte o metrô, ou uma linha de
ônibus alternativa, ou caminhando diretamente ao CBD. O problema é determinar
o número de estações de metrô e suas localizações ótimas, de forma a maximizar
a captação da demanda para esse meio de transporte. Outros objetivos podem ser
adotados, como, por exemplo, a minimização do tempo médio de deslocamento total
Resolução de Problemas de Transporte com Diagramas de Voronoi
53
até o terminal do CBD (Okabe et al., 2000, Seção 9.2.7), minimização do tamanho da
frota de veículos para um determinado nível de demanda (Saka, 2001), etc.
Seja a região urbana hipotética R mostrada na Figura 3, que é atualmente
servida por uma linha de ônibus convergindo para o terminal CBD. Além do
terminal CBD, existem sete pontos de embarque/desembarque ao longo da linha
de ônibus, (numerados 1,…,7), dentro da região R. Uma nova linha de metrô está
sendo planejada, que se desenvolverá ao longo de uma circunferência de raio r =
3.85 km, como mostrada na Figura 3. A demanda de transporte, no caso, segue
uma função de densidade exponencial negativa, circular, com centro no CBD. As
curvas circulares da Figura 3 indicam os níveis de demanda em termos percentuais,
correspondendo 100% ao CBD.
Ao acrescentar uma nova estação à linha do metrô, dois efeitos contrários
influem na possibilidade de captação adicional da demanda, e na perda de parte da
demanda já existente (Hamacher et al., 2001; Laporte et al., 2002). Em primeiro
lugar, o tempo de percurso do metrô vai aumentar devido aos tempos adicionais
ocasionados pela aceleração e desaceleração da composição, como também pela
parada do trem na nova estação. Para alguns usuários, esse tempo adicional pode
alterar sua escolha do modo de transporte, levando-os a selecionar o ônibus ou
decidir ir a pé até o CBD. Em segundo lugar, esse acréscimo no número de pontos de
embarque poderá atrair para o metrô novos usuários localizados nas proximidades
da nova estação. Assim, dois efeitos contrários ocorrem nesse processo, e o modelo
de otimização busca equilibrar tais efeitos, selecionando o número e a localização
das estações que maximizem a captação da demanda para o sistema de transporte
rápido (Hamacher et al.,2001; Laporte et al., 2002).
4.2 Diagrama de Voronoi correspondente
Sejam ga e gd a aceleração e a deceleração da composição de metrô e seja VC
sua velocidade de cruzeiro projetada (Saka, 2001). Durante as fases de aceleração e
desaceleração, as distâncias cobertas pelo veículo são, respectivamente,
D(a) =
VC2
V2
and D ( d ) = C .
2 ga
2 gd
(7)
Se Di , i +1 é a distância na linha férrea entre as duas estações adjacentes i e i + 1
, a velocidade do metrô nesse trecho é dada por
54
Transporte em Transformação XI
(s)
V
V i , i +1 = ( D ( a ) + D ( d ) ) C + ( Di , i +1 − D ( a ) − D ( d ) ) VC / Di , i +1 , 2
se D ( a ) + D ( d ) ≤ Di , i +1 e por
(s)
V i , i +1 =
1 2 ga gd Di , i +1
,
2
ga + gd
(8)
(9)
em caso contrário (Saka, 2001).
Figura 3 – Uma região urbana servida por uma linha de ônibus e
uma nova linha de metrô
Figura 3 – Uma região urbana servida por uma linha de ônibus e
uma nova linha de metrô
Para cada configuração, representada pelo número de estações e as respectivas
localizações, a velocidade média em cada link é computada de acordo com (8) ou (9).
Assim, o tempo de percurso da composição, desde a estação i até o CBD, é dado por
i −1
D j , j +1
j =0
(s)
j , j +1
tvi( s ) = ∑
V
+
i
∑
j =1
ST
(s)
,
(10)
Resolução de Problemas de Transporte com Diagramas de Voronoi
55
(s)
onde ST é o tempo médio de parada numa estação. No caso da linha de
ônibus, uma vez que o número e as localizações dos pontos de parada são admitidos
fixos no problema, e uma vez que o movimento dos veículos é afetado pelas
interferências com o fluxo externo, admitiu-se uma velocidade média constante
(b )
V . Assim o tempo médio de percurso do ônibus desde o ponto de parade i até o
CBD é dado por
i −1
tvi(b ) = ∑
j =0
D j , j +1
V
(b )
+
i
∑
ST
(b )
,
(11)
j =1
(b )
onde ST é o tempo médio de parada do ônibus num ponto qualquer. Por
outro lado, o tempo de percurso a pé do usuário, desde seu ponto de origem X até
um ponto de ônibus ou uma estação de metrô, representados genericamente por Pi
, é dado por
(i )
tH
=
k
X − Pi ,
VH
(12)
onde VH é a velocidade média de uma pessoa ao caminhar, sendo k um
coeficiente corretivo (route factor) que reflete a impendância da rede viária em
relação à métrica Euclidiana (Galvão et al., 2006; Laporte et al., 2002). O tempo
médio de espera tW( L ) num ponto de embarque qualquer é admitido como igual à
metade do headway t L observado na rota L que contenha i ( L = s para metrô, e
L = b para ônibus).
O tempo total gasto por uma pessoa se deslocando do ponto X até o CBD,
através do ponto de embarque genérico i (metrô ou ônibus), é dado pela soma
desses três elementos
Ti = tvi( L ) + t H(i ) + tW( L )
(i = 1,..., m) .
(13)
Assim, para cada origem X, o modelo busca o ponto de embarque i (seja
ônibus, metrô, ou caminhando diretamente a pé até o CBD) que apresente o menor
56
Transporte em Transformação XI
valor de T (i ) . Fazendo as necessaries substituições em (13), Ti pode ser expresso
da seguinte forma
Ti = c X − Pi
+ wi ,
(i = 1, 2..., m) ,
(14)
onde c é uma constante. Dividindo ambos os termos de (14) por c, o processo
de zoneamento resultante, em cada estágio do modelo de localização/alocação,
pode ser representado por um diagrama de Voronoi com pesos aditivos (Seção 2),
associado aos pontos geradores P ≡ {P1 , P2 ,..., Pm } , que são, no caso, os pontos de
transferência (ônibus, metrô e o CBD).
4.3 Modelo de localização/alocação
O objetivo do modelo de localização/alocação é maximizar o total de
passageiros que potencialmente pode ser transportado pelo metrô, atuando em duas
variáveis de decisão: (a) número de estações de metrô; (b) localização das estações
ao longo da linha. Uma vez que o traçado em planta do metrô já está definido neste
exemplo, os locais possíveis para localização das estações estão sobre um arco de
circunferência. Esses pontos podem então ser representados por uma variável θ
(um ângulo) de forma que cada ponto ao longo da linha corresponda a um valor
de θ dentro do intervalo (θmin , θmax). Seja Θ = (θ1, …,θs) o vetor que representa as
localizações das estações, sendo s o número de estações. Seja f ( X ) , por outro lado,
a função que representa a densidade da demanda no ponto X. A função objetivo a
ser maximizada é a seguinte
G (Θ s ) =
b+ s
∑ ∫ f ( X ) dX ,
(15)
i =b +1 V
i
onde i representa as estações de metrô (i = 1, 2,..., s ) , sendo Vi o diagrama de
Voronoi correspondente à estação i. A avaliação numérica de G ( Q s ) envolve a construção
do diagrama de Voronoi, com pesos aditivos, correspondente a cada ponto de embarque
(ônibus, metrô, a pé). Essa construção foi feita, neste caso, com a técnica quad-tree
(Seção 3). Foi utilizado, para maximizar (15), o método de Hooke e Jeeves (1962). No
modelo foi imposta apenas uma restrição, obrigando a distância média entre estações de
metrô não ser inferior a uma determinada extensão, no caso em questão 800m.
Resolução de Problemas de Transporte com Diagramas de Voronoi
57
4.4 Aplicação do modelo
Para a aplicação do modelo foram adotados os seguintes valores para as
variáveis do problema: k = 1.35 , VH = 4.4 km/h, V
(b )
= 20 km/h na linha de ônibus,
VC = 60 km/h para o metrô, tempo médio de parade igual a 90 seg para ônibus e
30 seg para metrô, headway de 5 min para ônibus e 1,5 min para o trem. Por outro
lado, as pessoas não estão dispostas a andar longas distâncias para usar o transporte
público, preferindo, nesse caso, ir direto a pé ao CBD, utilizar o automóvel ou tomar
um táxi. Com base em Sullivan e Morral (1996), admitimos um tempo máximo de
percurso a pé de 20 min até a estação do metrô, e de 15 min até o ponto de ônibus. O
modelo de otimização, combinado com o sub-programa para construir o diagrama de
Voronoi com pesos aditivos, foi aplicado variando o número de estações do metrô de
1 a 7. Os resultados são mostrados na Tabela 1, onde aparecem o número de iterações
necessárias para se chegar à solução ótima, a distância média entre estações e o nível
de demanda atraída pelo metrô, expressa em porcentagem sobre a demanda total.
Observa-se que, para 5 estações, se alcança o máximo nível de atração da
demanda para o metrô. Mas, como a distância média mínima entre estações foi
limitada a 800m nesta aplicação, a solução final, que atende à restrição, possui quatro
estações, conforme indicado na Tabela 1. Na Figura 4 são mostradas as localizações
ótimas das estações de metrô para a solução de quatro instalações, juntamente com as
áreas de influência de cada ponto de embarque, mais o CBD. Essas áreas de influência
são o resultado da aplicação do diagrama de Voronoi com pesos aditivos.
Table 1 - Resultados da otimização em função do número de estações do metrô
Número de estações
do metro (s)
1
2
3
4
5
6
7
Número de iterações
29
65
205
227
359
441
443
Distância media entre
estações (m)
2,103
1,402
1,051
841
701
601
526
Demanda atraida pelo
metrô (%)
25.38
44.04
50.71
52.19
52.62 (*)
52.32
51.61
(*) Captação máxima da demanda pelo metrô devida aos efeitos contrários na atração dos usuários.
58
Transporte em Transformação XI
5. Conclusões
Desenvolvimentos recentes em geometria computacional abriram caminho
para se trabalhar com diagramas de Voronoi de maior escala e mais complexos,
o que possibilitou resolver importantes problemas de transportes e de logística. A
utilização de diagramas de Voronoi não ordinários, como o de pesos multiplicativos,
aditivos ou combinados, bem como os diagramas de Voronoi com obstáculos,
associados a modelos de otimização do tipo localização-alocação, permitem
resolver problemas práticos nas fases de planejamento de sistemas de transporte,
conforme demonstrado no presente trabalho. Da mesma forma, problemas espaciais
de logística podem ser resolvidos de forma semelhante.
De fato, diagramas de Voronoi podem ser utilizados na solução de problemas
logísticos relacionados com a determinação de zonas de serviços a serem alocadas
a pessoas ou veículos (Boots e South, 1997; Galvão et al., 2006; da Silva, 2004;
Novaes et al., 2007). A utilização de diagramas de Voronoi na solução de problemas
logísticos leva geralmente a fatores de carga mais equilibrados entre os distritos. Isso
ocorre porque os diagramas de Voronoi associados a esses problemas apresentam
grau de liberdade maior do que as formas de zoneamento resultantes dos métodos
tradicionais. Por outro lado, o potencial das possíveis aplicações de diagramas de
Voronoi é bastante grande e merece ser explorado extensiva e intensivamente.
Resolução de Problemas de Transporte com Diagramas de Voronoi
59
Agradecimento
Esta pesquisa foi apoiada financeiramente pelo CNPq – Conselho Nacional
de Desenvolvimento Científico e Tecnológico, projeto nº 300886/2005-5.
Figure 4 – Resultado da aplicação do modelo de localização-alocação
com o auxílio de diagrama de Voronoi
60
Transporte em Transformação XI
Referências bibliográficas
Aurenhammer, F. (1991) Voronoi Diagrams – a Survey of a Fundamental Geometric Data Structure. ACM Computing Surveys, v. 23, n. 3, p. 345-405.
Boots B.e R. South (1997) Modeling Retail Trade Areas Using Higher-order, Multiplicatively Weighted Voronoi Diagrams. Journal of Retailing, v. 73, n. 4, p.519536.
D’Amico S.J., S.J.Wang, R. Batta e C.M. Rump (2002) A Simulated Annealing
Approach to Police District Design. Computers & Operations Research, v. 29,
n.6, p. 667-684.
Dasci A. e V. Verter (2001) A Continuous Model for Production-Distribution System Design. European Journal of Operational Research, v. 129, p. 287-298.
da Silva, A.C.L. (2004) Estratégia para Divisão da Áreas de Estudo em Problemas
Logísticos – Uso de Diagrama de Voronoi com Obstáculos, Tese de Doutorado,
Programa de Pós-Graduação em Engenharia de Produção, Universidade Federal
de Santa Catarina.
Drezner, Z. (ed.) (1995) Facility Location: A Survey of Application and Methods.
Springer, Berlin.
Drezner, Z. e H. Hamacher (eds.) (2002) Facility Location: Applications and Theory. Springer, Berlin.
Fortune, S. (1987) A Sweepline Algorithm for Voronoi Diagrams. Algorithmica, v.
2, p. 153-174.
Galvão, L.C.; Novaes, A.G.; de Cursi, J.E.S. e J.C. Souza (2006) A Multiplicatively-weighted Voronoi Diagram Approach to Logistics Districting. Computers &
Operations Research, v.33, p. 93-114.
Hamacher, H.W., Liebers, A., Schöbel, A., Wagner D. e F. Wagner (2001) Locating
New Stops in a Railway Network. Electronic Notes in Theoretical Computer
Science, v. 50, n.1, 11 pgs.
Hoff III, K.; Culver, T.; Keyser, J.; Lin, M.C. e D. Manocha (2000) Interactive
Motion Planning Using Hardware-accelerated Computation of Generalized Voronoi Diagrams. Proceedings of the 2000 IEEE International Conference on
Robotics & Automation, San Francisco, CA, p. 2931-2937.
Hojati M. (1996) Optimal Political Districting. Computers & Operations Research,
v. 23, n. 12, p.1147-1161.
Hooke, R. e T.A. Jeeves (1962) Direct Search Solution of Numerical and Statistical
Problems. Journal of the Association for Computing Machinery, v. 8, p.212229.
Resolução de Problemas de Transporte com Diagramas de Voronoi
61
Langevin A.; Mbaraga P. e J.F. Campbell (1996) Continuous Approximation Models in Freight Distribution: an Overview. Transportation Research – B, v. 30,
n. 3, p. 163-188.
Laporte, G.; Mesa, J.A. e F.A. Ortega (2002) Locating Stations on Rapid Transit
Lines. Computers & Operations Research, v. 29, p. 741-759.
Mehrotra A.; Johnson E.L. e G.L. Nemhauser (1998) An Optimization Based Heuristic for Political Districting, Management Science, v. 44, n. 8, p.1100-1114.
Muyldermans L.; Cattrysse D.; Van Oudheusden D. e T. Lotan (2002) Districting
for Salt Spreading Operations, European Journal of Operational Research, v.
139, n. 3, p.521-532.
Novaes A.G.; Souza de Cursi J.E. e O.D. Graciolli (2000) A Continuous Approach
to the Design of Physical Distribution Systems, Computers & Operations Research, v. 27, n. 9, p. 877-893.
Novaes, A.G.; Souza de Cursi, J.E., da Silva, A.L. e J.C. Souza (2007) Solving
Continuous Location-districting Problems with Voronoi Diagrams, Computers
& Operations Research (artigo aceito para publicação)
Okabe, A. e A. Suzuki (1997) Locational Optimization Problems Solved Through
Voronoi Diagrams, European Journal of Operational Research, v. 98, p.445456.
Okabe A.; Boots B. e K. Sugihara (2000) Spatial Tessellations Concepts and Applications of Voronoi Diagrams (second edition). Wiley, Chichester.
Preparata, F.P. e M.I. Shamos (1985) Computational geometry – An introduction.
Springer, New York.
Saka, A.A. (2001) Model for Determining Optimum Bus-stop Spacing in Urban
Areas, Journal of Transportation Engineering, Maio-Junho 2001, p.195-199.
Samet, H. (1988) Hierarchical Data Structures and Algorithms for Computer Graphics, IEEE Computer Graphics & Applications, May 1988, p 48-68.
Schoepfle O.B.e R.L.Church (1991) A New Network Representation of a “Classic”
School Districting Problem, Socio-Economic Planning Science, v. 25, n. 3, p.
189-197.
Sullivan, S. e J. Morrall (1996) Walking Distances to and from Light-rail Transit
Stations, Transportation Research Record 1538, Transportation Research Board, Washington, DC.
Suzuki, A. e A. Okabe (1995) Using Voronoi Diagrams. In: Drezner Z.(ed.). Facilty
Location: a Survey of Applications and Methods, p. 103-118, Springer, New York.
Williams Jr, J.C. (1995) Political Redistricting: a Review, Papers in Regional Science, v. 74, p.13-40.
62
Transporte em Transformação XI
Zoltners, A.A. e P. Sinha (1983) Sales Territory Alignment: a Review and Model,
Management Science, v. 29, n. 11, p.1237-1256.
Zhou G.; Min H. e M. Gen (2002) The Balanced Allocation of Customers to Multiple Distribution Centers in the Supply Chain Network: a Genetic Algorithm
Approach, Computers & Industrial Engineering, v. 43, p. 251-261.
Endereço do autor:
Antonio Galvão Novaes
Departamento de Engenharia de Produção e Sistemas
Universidade Federal de Santa Catarina
Campus Universitário – Trindade
Florianópolis, SC
88040-900
Tel: (48) 3721 7009
Modelagem Heurística no
Problema de Distribuição
de Cargas Fracionadas
de Cimento
3
Marcos Miura
Cláudio Barbieri da Cunha
Programa de Pós-Graduação em Engenharia de Sistemas Logísticos
Escola Politécnica da Universidade de São Paulo
Resumo
Este artigo trata do problema do agrupamento de cargas fracionadas na
distribuição do cimento ensacado partindo de um depósito central. O problema
consiste em definir quais entregas de cimento serão carregadas juntas em um
determinado veículo, de modo a aproveitar ao máximo sua capacidade e ao
mesmo tempo minimizar o custo com o frete pago aos transportadores que farão
sua distribuição. Em especial, o método de resolução proposto pode ser dividido
em três fases. Na primeira fase, as entregas pertencentes a um mesmo cliente são
agrupadas prioritariamente. Na segunda fase, são agrupadas as entregas de clientes
dentro de uma mesma cidade. Neste caso, uma simplificação necessária é considerar
64
Transporte em Transformação XI
que todas as entregas de uma mesma cidade estão localizadas em um único ponto.
Com isso, a distância entre os clientes se torna irrelevante e é proposto um método
baseado em um algoritmo genético para resolução de problemas de “bin-packing”
(BPP). Para a terceira fase, é considerado o agrupamento para pontos de entrega
pertencentes a cidades diferentes, onde as distâncias rodoviárias são consideradas.
Nesta etapa, é proposta uma variação do método anterior, incorporando ao modelo
algumas heurísticas para resolução de problemas de roteirização de veículos, como
o algoritmo de Clarke & Wright e o algoritmo do Vizinho Mais Próximo.
Abstract
This paper deals with the problem of grouping less-than-truckload deliveries
in bagged cement distribution departing from a central depot. The problem consists
in defining which cement deliveries shall be loaded in each given vehicle, aiming
to achieve its maximum occupancy as well as to minimize the total freight expense
paid to third-party carriers. The proposed solution method can be divided into three
consecutive stages. In the initial stage, we seek to merge all deliveries belonging
to the same client and load them into the same vehicle. In the second stage we then
group all deliveries located in the same city. In this case, we assume that distances
between consecutive deliveries are irrelevant when compared to the total distance
traveled from the depot. This allows us to model this problem as a “bin-packing”
problem (BPP) and to solve both phases using genetic algorithms. In the third stage,
merging of different delivery points located in different cities is considered. For this
step, a variation of the previous method is proposed, incorporating some heuristics
to solve the vehicle routing problem, such as Clarke & Wright’s savings algorithm
and the Nearest Neighbor procedure.
1. Introdução
O mercado de cimento atual no Brasil é muito competitivo. A presença
de vários competidores em busca de uma fatia do mercado exerce uma pressão
constante para redução dos preços, afetando a rentabilidade das empresas deste
segmento. Desta forma, surge uma necessidade permanente de aumentar a margem
comercial das vendas, seja através da redução dos custos, onde a logística possui
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
65
grande representatividade, seja na busca de canais de distribuição mais rentáveis,
além de outros fatores. Com isso, uma tendência de algumas dessas empresas
passou a ser o foco em clientes menores, no varejo, que podem proporcionar uma
margem de venda melhor. Por outro lado, o aumento da participação de clientes de
pequeno porte dificulta a atividade logística de distribuição, devido à pulverização
geográfica dos mesmos. Além disso, a diminuição do tamanho do pedido médio
feito por cada cliente faz com que o trabalho de agrupamento das entregas nos
veículos se torne fundamental para a redução dos custos.
A distribuição de cimento normalmente não se restringe a uma cidade ou
região metropolitana. Geralmente são atendidos vários municípios a partir de
uma base de origem, de diferentes tamanhos, cada qual com diversos pontos de
entrega. Normalmente, a distância de deslocamento desde o local de origem onde é
carregado o veículo até um município onde são realizadas as entregas é de magnitude
muito superior às distâncias de percurso entre entregas consecutivas. A forma de
contratação do transporte, e de remuneração dos transportadores autônomos ou
pequenas empresas transportadoras, favorece esse agrupamento por município,
uma vez que um custo adicional é incorrido apenas quando as entregas ocorrem em
municípios distintos, levando à necessidade do veículo se deslocar uma distância
maior para completar as entregas. Em outras palavras, o frete é determinado com
base no município de destino das cargas, e considerando o aproveitamento pleno da
capacidade de carga do veículo.
Tudo isso, associado a não existência de mapas digitais para a grande maioria
dos municípios onde devem ser realizadas entregas, com exceção daqueles de maior
porte, leva a uma programação da distribuição onde a localização dos destinos é
considerada em nível de município. Este tipo de consideração é muito conveniente
para a situação real, visto que, a cada dia, surgem novos clientes, de modo que,
mapear a localização exata de cada um é inviável. Desta forma, são formados
clusters de clientes em macro regiões, onde para cada cliente novo cadastrado na
base de dados, define-se este ponto de localização chamado de “zona de transporte”,
que pode representar sua cidade ou bairro (no caso de cidades grandes). Com isso,
podemos ter muitas entregas para um mesmo ponto de destino.
Nesse contexto propõe-se uma estratégia de solução buscando otimizar a
programação da distribuição diária de cimento aos pontos de entrega, que compreende
a definição, para cada município ou zona de transporte, quantos veículos de cada
66
Transporte em Transformação XI
tipo serão necessários, e quais pontos de entrega serão alocados a cada veículo,
buscando minimizar a despesa total com frete. Como são normalmente reduzidas as
distâncias entre pontos de entrega alocados a um mesmo veículo, não há necessidade
de definição do roteiro ou seqüência de entregas alocadas ao veículo, o que simplifica
o problema e permite considerar uma abordagem de solução heurística, inspirada em
uma generalização do chamado problema de bin-packing (BPP). Para os pontos de
entrega remanescentes, isto é, todos aqueles que não permitiram completar a carga
de algum dos veículos alocados a cada um dos municípios ou zonas de transporte,
é então resolvido um problema de roteirização, que consiste em agrupar e roteirizar
esses conjuntos de pontos, de forma a minimizar o custo de transporte. Para tanto,
são incorporadas ao modelo algumas heurísticas tradicionais para resolução do
problema de roteirização de veículos.
A estratégia de solução proposta é aplicada a um problema real de uma grande
empresa do setor de cimentos, comparando-se os resultados obtidos com a solução
praticada pela empresa.
2. Revisão Bibliográfica
Os problemas de roteirização de veículos pertencem a uma categoria ampla
de problemas de pesquisa operacional conhecida como problemas de otimização
de rede. Dentro desta categoria estão os problemas clássicos, como o problema do
fluxo máximo, problema do caminho mínimo, problema de transporte, problema de
designação.
Problemas de roteirização de veículos foram exaustivamente estudados por
diversos autores na literatura. Uma estratégia de solução para é a clusterização ou
agrupamento dos nós. Consiste em agrupar os nós ou arcos de demanda primeiro,
e depois construir rotas econômicas para cada agrupamento. Gillet e Miller (1974)
e Fisher e Jaikumar (1981) aplicaram esta estratégia para roteirização de veículos
com um único depósito.
A maioria dos problemas de roteirização de veículos é tratada como NPdifícil. Em outras palavras, o esforço computacional para a sua resolução cresce
exponencialmente com o tamanho do problema, dado pelo número de pontos a
serem atendidos. Por isso, muitos trabalhos neste campo foram desenvolvidos na
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
67
busca de métodos heurísticos que apresentassem bom desempenho computacional
e ao mesmo tempo soluções iguais ou muito próximas aos métodos exatos.
O algoritmo de Clarke e Wright (1964) ou algoritmo das economias é um dos
métodos heurísticos mais conhecidos e utilizados para resolução do problema de
roteirização de veículos. Apesar de manter seu conceito principal, muitas modificações
foram sugeridas por outros autores, de modo a melhorar os resultados do algoritmo.
Golden et al.(1984) propuseram algumas mudanças, acrescentando custos fixos e
custos de oportunidade no cálculo das economias, de modo a melhor representar
problemas com frota heterogênea. Desrochers e Verhoog (1991) apresentaram uma
nova metodologia para selecionar as rotas mais econômicas, o Matching Based
Savings Algorithm (MBSA). Outros trabalhos importantes baseados no critério de
economias podem ser encontrados em Mole e Jameson (1976), Paessens (1988) e
Landeghem (1988).
Como visto na seção anterior, é proposto um método baseado no problema de
bin-packing para resolução do problema de roteirização de veículos. No problema
original de bin-packing (BPP) o objetivo é encontrar o número mínimo de mochilas
ou bins de tamanhos idênticos que são necessários para armazenar um dado número
de objetos de tamanhos/dimensões variadas de forma que a capacidade de cada bin
não seja violada (Garey e Johnson, 1979).
Diversas heurísticas são apresentadas por Martello e Toth (1990) para
resolver este tipo de problema e um método enumerativo é apresentado para casos
pequenos utilizando branch-and-bound. Um caso particular do BPP é o variablesized bin packing (VSBPP), onde os bins não têm tamanhos idênticos. Zhang (1997)
prova que as heurísticas clássicas não fornecem bons resultados para este tipo de
problema. Kang e Park (2003) apresentam variações nas heurísticas clássicas, de
modo a oferecer bons resultados.
Apesar do problema clássico de bin-packing ser bem conhecido e muito
explorado na literatura; poucos trabalhos são encontrados relacionando sua
aplicação com a de problemas de roteirização de veículos. Apenas nos últimos
anos, este tema foi levantado por alguns autores. Poh et al.(2005) fizeram uma
analogia entre o problema de bin-packing com o problema de programação de
veículos no transporte de multi-comodities com frota heterogênea. Altinel e Oncan
(2005) utilizaram a idéia da heurística First-Fit-Decreasing em uma modificação
do cálculo de economias do algoritmo de Clarke e Wright (1964).
68
Transporte em Transformação XI
Em resumo, poucos trabalhos foram realizados abordando a resolução de
problemas de roteirização de veículos com entregas fracionadas em conjunto com a
resolução de problemas de bin-packing com bins de tamanhos variáveis (VSBPP).
3. Caracterização Do Problema
É dado um conjunto de pontos de entrega de cimento a serem atendidos em
um dado dia. Para cada ponto, são conhecidos a quantidade a ser entregue (em
peso), o tamanho do veículo máximo que pode atendê-lo e a sua localização em
termos do município onde se situa.
Embora os clientes demandem diferentes tipos de produtos, a carga pode
ser considerada homogênea em termos do seu acondicionamento e transporte
no veículo, já que os produtos, na sua maioria, são acondicionados em sacos
de 40kg e 50kg, sem qualquer restrição para carregamento no veículo, exceto
a capacidade máxima do veículo, normalmente em peso para esse tipo de
produto. Pode-se assumir que todos os clientes recebem a mercadoria em horário
comercial, sem restrição de janela de tempo. O número de entregas normalmente
alocadas a cada veículo, e o tempo por entrega, permitem o cumprimento das
mesmas durante o horário comercial, sem que isso constitua uma restrição da
programação.
Um mesmo cliente pode demandar mais de uma carga (tipos diferentes de
cimento). No entanto, a soma das mesmas não ultrapassa a capacidade de um
veículo. Além disso, as entregas para um mesmo cliente devem ser agrupadas
prioritariamente na mesma viagem.
As entregas devem ser realizadas utilizando uma frota de veículos de terceiros,
composta de veículos de diferentes tipos/tamanhos e considerada ilimitada em
termos do número de veículos disponíveis de cada tipo. Para cada tipo de veículo
é conhecida a sua capacidade de carga (em peso). Todos os veículos partem de um
único ponto de origem, onde é feito o carregamento.
Os clientes possuem restrições quanto ao tamanho máximo de veículos que
podem receber, visto que muitos deles não possuem infra-estrutura suficiente para
receber veículos grandes como carretas e bitrens, por exemplo. Além disso, alguns
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
69
clientes podem estar localizados em regiões metropolitanas, onde a circulação de
veículos pesados é proibida.
Para cada município de destino, é conhecido o valor do frete de entrega,
que é proporcional à distância desde a origem, e depende do tipo/tamanho do
veículo. Adicionalmente, o frete é pago por viagem, independente se o veículo foi
totalmente ocupado ou não. Quando mais de uma entrega de diferentes municípios
são agrupadas em um mesmo veículo, é considerado o valor de frete correspondente
ao município mais distante da origem.
O objetivo do problema é designar/alocar todas as entregas nos veículos,
de modo a minimizar o custo total com o pagamento de fretes para esses
transportadores.
4. Formulação Matemática
Seja N o número total de entregas a ser feita em um dia e K o número total de
veículos disponíveis. Para cada ponto i = 1, 2, ..., N é conhecida sua demanda wi e
o tamanho máximo (Mi)do veículo que poderá atendê-lo. Analogamente, para cada
veículo k = 1, 2, .., K é conhecida sua capacidade máxima Qk e o valor do frete fik
para atender o cliente i. Define-se ainda ck o custo da viagem feita pelo veículo k.
Parâmetros
N = Número total de clientes a serem atendidos em um determinado período
K = Número total de veículos disponíveis
ck = custo da viagem feita pelo veículo k
fik = frete do veículo k para atender cliente i
Qk = Capacidade máxima do veículo k
wi = demanda do cliente i
Mi = Tamanho máximo do veículo que poderá atender o cliente i
(capacidade)
70
Transporte em Transformação XI
Definem-se as variáveis de decisão:
{
1, se o cliente i é atendido pelo veículo k
0, caso contrário
{
1, se o veículo k é usado
0, caso contrário
xik =
yk =
A formulação matemática é dada por:
A formulação
matemática é dada por:
K
A
formulação
matemática éé dada
dada por:
por:
K
A formulação
c k matemática
⋅ yk Min
(1)
∑
K
A
formulação
K ckk=1⋅ y kmatemática é dada por:
Min
�
Min
K ck ⋅ y k
�
k
=1 c ⋅ y
Min �
k
=1 ck ⋅a:
Sujeito
ykk
Min
�
k =1a: k
Sujeito
k =1a:
Sujeito
Sujeito
,, para
(2)
ck ≥a:
f ⋅x para todo
todo kk ∈
K, ii ∈
N
∈ K,
∈ N
Sujeito
cc k ≥
≥a: ff ii kk ⋅⋅ xxikikik
,, para
para todo
todo kk ∈
K, ii ∈
N
∈ K,
∈N
cKKkk ≥ f ii kk ⋅ xikik
, para todo k ∈ K, i ∈ N
K x =1
,
para todo i ∈ N
ik
= 11 K xik
para todo
todo iii ∈
∈ N
N
ik =
,,, para
(3)
k =1 xik
para
todo
∈
N
k =1 x = 1
, para todo i ∈ N
kN
=1 ik
N
kN
=1 w ⋅ x ≤ Q ⋅ y
, para k ∈ K
ik
k
k
i
N wi ⋅ x ik ≤ Qk ⋅ y k
para kkk ∈
K
∈ K
i =1 wi ⋅ x iik
≤ Qk ⋅ y k ,,, para
(4)
para
K
∈
k
i =1 w ⋅ x
≤ Qk ⋅ y k
, para k ∈ K
=1 ⋅ ix ik
iM
≥Q ⋅y
, para todo k ∈ K, i ∈ N
i =1 i ⋅ xik ≥ Qk ⋅ y k
M
∈ K,
∈N
, para
para todo
todo kk ∈
K, ii ∈
N
i ⋅ x ik ≥ Q k ⋅ y k
M
,
M ii ⋅ xikikik ≥ Qkk ⋅ y kk ,, para
(5)
∈ K,
∈ N
para todo
todo kk ∈
K, ii ∈
N
A função objetivo (1) visa minimizar o custo total das viagens. As restrições (2) garantem
A função
função objetivo
objetivo (1)
(1) visa
visa minimizar
minimizar oo custo
custo total
total das
das viagens.
viagens. As
As restrições
restrições (2)
(2) garantem
A
o custo
de cada
viagem
seja minimizar
o valor referente
ao
maior
frete entre
as cargasgarantem
dos clie
A
função
objetivo
(1)
visa
o
custo
total
das
viagens.
As
restrições
funçãode
(1) visaseja
minimizar
custo totalao
viagens.
restrições
(2) garantem
o custo
custo
deobjetivo
cada viagem
viagem
seja
valoro referente
referente
aodasmaior
maior
freteAsentre
entre
as cargas
cargas
dos clie
clie
oA
cada
oo valor
frete
as
dos
alocadas
no
veículo.
As
restrições
(3)
garantem
que
cada
cliente
será
atendido
por
apena
(2)oalocadas
garantem
que
o custo
derestrições
cada
viagem
seja
o valorque
referente
ao
maior
frete
entre
aspordos
custo
de
cada
viagem
seja
o
valor
referente
ao
maior
frete
entre
as
cargas
clie
no
veículo.
As
(3)
garantem
cada
cliente
será
atendido
apena
alocadas
no veículo.
As(4)
restrições
(3) que
garantem
que cada de
cliente
será
atendido
por apenas
veículo.
As
restrições
garantem
a capacidade
cada
um
doscliente
veículos
não
cargas
dos
clientes
alocadas
no
veículo.
As
restrições
(3)
garantem
que
cada
alocadas
no veículo.
As(4)
restrições
(3) que
garantem
que cada de
cliente
por apena
veículo. As
restrições
(4)
garantem
que
a capacidade
capacidade
de
cadaserá
umatendido
dos veículos
veículos
não
veículo.
restrições
garantem
dos
não
violada. As restrições
(5) garantem
que oaveículo
alocado acada
cadaum
cliente
seja menor
q
será
atendido
por
apenas (5)
um
veículo.
As
restrições
(4)alocado
garantem
que um
a cliente
capacidade
veículo.
restrições
(4)
garantem
que
a
capacidade
de
cada
dos
veículos
nãoqq
violada.
As
restrições
garantem
que
o
veículo
a
cada
seja
menor
violada.
As
restrições
(5)
garantem
que
o
veículo
alocado
a
cada
cliente
seja
menor
tamanho de veículo máximo permitido para aquele cliente.
detamanho
cada umAs
dos
veículos
não
seja
violada.
Aso restrições
(5) garantem
o veículo
violada.
restrições
(5) garantem
que
veículo
alocado
a cadaque
cliente
seja menor q
tamanho
de
veículo
máximo
permitido
para
aquele cliente.
cliente.
de
veículo
máximo
permitido
para
aquele
tamanho
de veículo
máximo
permitido
para aquele
cliente.
alocado
a cada
cliente seja
menor
que o tamanho
de veículo
máximo permitido para
5. ESTRATÉGIA DE SOLUÇÃO
5.
ESTRATÉGIA
DE
SOLUÇÃO
aquele
cliente. de programação
5.
ESTRATÉGIA
DE SOLUÇÃO
O problema
de entregas de cimento pode ser visto como uma combin
5.
ESTRATÉGIA
DE SOLUÇÃO
O
problema
de programação
programação
de entregas
entregas de
de cimento
cimento pode
pode ser
ser visto
visto como
como uma
uma combin
combin
O
problema
de
de
entre um problema que apresenta
características
de “bin-packing”
com um problem
O
problema
de
programação
de
entregas
de
cimento
pode
ser
visto
como
uma
combin
entre
um
problema
que
apresenta
características
de
“bin-packing”
com
um
problem
entre
um problema
que apresenta
características
de “bin-packing”
problem
roteirização
de veículos.
A determinação
de como
vão ser feitascom
as um
entregas
pa
entre um problema
que apresenta
características
de “bin-packing”
problem
roteirização
de veículos.
veículos.
A determinação
determinação
de como
como
vão ser
ser feitas
feitascom
as um
entregas
pa
roteirização
de
A
de
vão
as
entregas
pa
subconjunto
clientes
correspondente
a
cada
município,
em
termos
de
quantos
e
q
5.roteirização
Estratégia
de
Solução
de
veículos.
A
determinação
de
como
vão
ser
feitas
as
entregas
pa
subconjunto
clientes
correspondente
a
cada
município,
em
termos
de
quantos
e
subconjunto
de eclientes
correspondente
a cada
município,
emvista
termos
quantos
e qq
veículos utilizar
quais entregas
alocar a cada
veículo
pode ser
comodeuma
generaliz
subconjunto
de eeclientes
correspondente
a cada
município,
emvista
termos
quantos
e q
veículos utilizar
utilizar
quais entregas
entregas
alocar aa cada
cada
veículo
pode ser
ser
comodeuma
uma
generaliz
veículos
quais
alocar
veículo
do problema
de de
“bin-packing”.
Os
veículos de
representam
as mochilas
(ou bins),
neste cas
O problema
programação
de
entregas
cimentopode
pode
servista
vistocomo
como
umageneraliz
veículos
utilizar
e
quais
entregas
alocar
a
cada
veículo
pode
ser
vista
como
uma
generaliz
do
problema
de
“bin-packing”.
Os
veículos
representam
as
mochilas
(ou
bins),
neste
cas
do
problema
de eum
“bin-packing”.
Os
veículos
representam
mochilas
bins),
cas
diferentes
tipos
tamanhos,
nos
quais
as entregas
devem as
ser
alocadas(ou
de modo
aneste
minimi
combinação
entre
problema
que
apresenta
características
de
“bin-packing”
com
do problema
de ee“bin-packing”.
veículos
representam
bins), aaneste
cas
diferentes
tipos
tamanhos, nos
nosOs
quais
as entregas
entregas
devem as
sermochilas
alocadas (ou
de modo
modo
minimi
diferentes
tipos
tamanhos,
quais
as
devem
ser
alocadas
de
minimiz
despesa total
de frete.
Para aquelas
entregas
que não
permitiram
completar
um veículo
diferentes
tipos
e
tamanhos,
nos
quais
as
entregas
devem
ser
alocadas
de
modo
a
minimi
despesa
total
de
frete.
Para
aquelas
entregas
que
não
permitiram
completar
um
veículo
despesa
de frete.
aquelas
que não
completar
umentrega
veículode
ser entãototal
resolvido
umPara
problema
de entregas
roteirização,
parapermitiram
definir quais
grupos de
despesa
total
de
frete.
Para
aquelas
entregas
que
não
permitiram
completar
um
veículode
ser
então
resolvido
um
problema
de
roteirização,
para
definir
quais
grupos
de
entrega
de
ser alocados
então resolvido
um problema
de roteirização,
paraminimizado.
definir quais grupos de entrega
a cada veículo,
de modo
que o frete seja
ser alocados
então resolvido
um problema
de roteirização,
para
definir quais grupos de entrega de
alocados
cada veículo,
veículo,
de modo
modo
que oo frete
frete seja
seja
minimizado.
ser
aa cada
de
que
minimizado.
ser alocados a cada veículo, de modo que o frete seja minimizado.
�
∑
�
�
�
�
�
∑
�
�
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
71
um problema de roteirização de veículos. A determinação de como vão ser feitas
as entregas para o subconjunto de clientes correspondente a cada município, em
termos de quantos e quais veículos utilizar e quais entregas alocar a cada veículo
pode ser vista como uma generalização do problema de “bin-packing”. Os veículos
representam as mochilas (ou bins), neste caso de diferentes tipos e tamanhos, nos
quais as entregas devem ser alocadas de modo a minimizar a despesa total de frete.
Para aquelas entregas que não permitiram completar um veículo deve ser então
resolvido um problema de roteirização, para definir quais grupos de entrega devem
ser alocados a cada veículo, de modo que o frete seja minimizado.
Tanto o problema de bin-packing quanto o de roteirização de veículos são,
do ponto de vista matemático, problemas de natureza combinatória, em que o
esforço computacional cresce exponencialmente com o tamanho do problema, o
que impede a sua resolução através de algoritmos exatos (Garey e Johnson, 1979).
Assim, propõe-se uma estratégia de solução heurística para a sua resolução.
O método de resolução é dividido em três fases: a primeira agrupa cargas
de um mesmo cliente, a segunda agrupa cargas de clientes de uma mesma zona de
transporte (cidade ou bairro), e por último, a terceira consolida cargas de clientes
de regiões diferentes, as quais implicam em fretes distintos. Considera-se que a
cada fase, as cargas já agrupadas na etapa anterior não poderão ser reagrupadas
separadamente. O método descrito acima é similar à estratégia de solução “cluster
first-route second” utilizada para a resolução de problemas de roteirização de
veículos nos trabalhos de Gillett e Miller (1974) e Fisher e Jaikumar (1981).
Esta estratégia de divisão por fases foi utilizada de modo a reduzir o número de
cargas a ser considerado em cada fase, e proporcionando um tratamento diferenciado
a cada etapa do algoritmo. Para as cargas do mesmo cliente e da mesma cidade
(primeira e segunda fase), em que o frete unitário não muda, será utilizado um
método heurístico para resolução de problema com características de bin-packing,
como explicado anteriormente.
Como já foi mencionado na seção anterior, o menor ponto de localização dos
clientes são as zonas de transporte, representadas dentro de uma cidade. Desta forma,
a roteirização dos pontos dentro de uma zona de transporte não se faz necessária,
dada a ausência de informações mais detalhadas sobre a posição geográfica dos
clientes. O problema passa a ser o agrupamento das cargas de uma mesma cidade de
72
Transporte em Transformação XI
modo a reduzir o número de veículos necessários para realizarem as viagens e, com
isso, minimizar a despesa total com o pagamento dos fretes. Lembrando também
que os mesmos são pagos por viagem, independente se a capacidade do veículo foi
totalmente utilizada ou não.
Para a Fase III, onde as distâncias devem ser levadas em consideração,
são incorporadas outras heurísticas aos algoritmos genéticos para a obtenção da
população inicial, tais como a versão paralela do algoritmo de Clarke & Wright ou
algoritmo das economias e a heurística do Vizinho Mais Próximo. Nesta etapa, as
cargas que não foram agrupadas ou que foram agrupadas, mas não completaram a
capacidade total dos veículos nas etapas anteriores, serão consideradas.
5.1. Fases I e II: Algoritmo para resolução do VSBPP
Conforme visto anteriormente, problema de alocação das entregas de cada
município aos veículos pode ser visto como problema de bin-packing com bins
de tamanhos variados (Variable Sized Bin Packing Problem – VSBPP). Dada a
dificuldade de resolução desse problema, foi proposta uma estratégia de solução
heurística baseada na metaheurística algoritmo genético.
Os algoritmos genéticos são algoritmos de buscas baseados nos mecanismos
de seleção natural e na genética. Idealizados e estabelecidos por Holland (1975)
esses algoritmos implementam estratégias de buscas paralelas e aleatórias para
solucionar problemas de otimização. Os algoritmos genéticos fazem parte da
classe de algoritmos denominados algoritmos populacionais. Em linhas gerais, eles
trabalham com um grupo (ou população) de soluções. Cada indivíduo é representado
por um cromossomo, que armazena as informações genéticas. Os cromossomos são
compostos por genes, os quais são responsáveis pelas características dos seres e
são trocados ou transmitidos durante o processo de reprodução. A cada iteração,
indivíduos da população são selecionados para reprodução, sendo os mais aptos
com maiores chances de serem transmitidos para a geração seguinte e os demais
menos aptos simplesmente eliminados de acordo com o princípio darwiniano de
seleção natural e sobrevivência do mais forte.
Uma forma de contornar a complexidade adicional proporcionada pela
possibilidade de usar veículos de tamanhos diferentes é aplicar heurística proposta,
baseada em algoritmos genéticos, para o problema do bin-packing tradicional
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
73
(BPP), considerando os diferentes tipos/tamanhos de veículo separadamente, a
partir do menor para o maior. Assim, resolve-se inicialmente, para cada município
de entrega, o sub-problema correspondente aos clientes que requerem entregas com
veículos menores. Caso sobre algum veículo não totalmente utilizado, busca-se
então alocar outras cargas de modo a completar a sua capacidade, considerando-se
clientes que podem ser atendidos por veículos maiores; para tanto é usada a heurística
Next-Fit-Decreasing, descrita em Martello e Toth (1990), onde são consideradas as
entregas remanescentes em ordem decrescente de peso. Uma vez atendidos todos os
clientes que requerem atendimento pelo menor tamanho de veículo, e completados
os veículos que realizam esse atendimento, passa-se então à resolução do problema
de bin-packing correspondente aos clientes que só podem ser atendidos pelo tipo/
modelo de veículo imediatamente superior, e assim sucessivamente, até os clientes
que não apresentem restrição quanto ao tipo/tamanho do veículo que possa atendêlo, como ilustrado pela Figura 1.
GA 1
GA 2
GA 3
Capacidade = 5
Capacidade = 15
Capacidade = 30
Bin 1
Bin 2
Bin 3
Figura 1: Estratégia de tratamento para caminhões de diferentes capacidades
A representação cromossômica adotada para a resolução de cada problema
de bin-packing será dada pelo indicação do veículo (bin) em que cada entrega é
alocada. A Figura 2 exemplifica esse conceito, indicando, a alocação, em termos
do veículo, para cada uma das oito entregas a serem programadas, que requereram
quatro veículos.
1
2
3
4
5
6
7
8
4
1
1
3
2
2
3
4
Figura 2: Representação do cromossomo no problema estudado
conceito, indicando, a alocação, em termos do veículo, para cada uma das
em programadas, que requereram quatro veículos.
1
74
2
3 em4Transformação
5
6 XI 7
Transporte
8
4
1
1
3
2
2
3
4
Figura 2: Representação do cromossomo no problema estudado
A população inicial é formada quase em sua totalidade por indivíduos gerados
aleatoriamente,
com
base empor
ordenações
randômicas
de entregas que são alocadas
al é formada quase em sua
totalidade
indivíduos
gerados aleatoriamente,
veículos atédepreencherem
sua capacidade.
Além
indivíduos,
são criados
rdenaçõesaosrandômicas
entregas que
são alocadas
aosdesses
veículos
até
maisAlém
três cromossomos
utilizando
as heurísticas:
Next-Fit-Decreasing,
First-Fitcapacidade.
desses indivíduos,
são criados
mais três
cromossomos
rísticas: Decreasing
Next-Fit-Decreasing,
First-Fit-Decreasing
Best-Fit-Decreasing
e Best-Fit-Decreasing
(Martello e Toth,
1990).
1990).
A função aptidão é definida através da seguinte expressão:
é definida através da seguinte expressão:
∑
¦ (C
N
N
f (S ) =
ii==11
ii
C MAX
MAX
N
)
22
(6)
(6)
Onde N é o número de veículos necessários para a solução S; Ci é o peso
ero de veículos
necessários
para ai, solução
Ci é o pesomáxima
total alocado
ao Esta função
total alocado
ao veículo
e Cmax é S;
a capacidade
do veículo.
é a capacidade máxima do veículo. Esta função aptidão visa minimizar a
aptidão visa minimizar a ociosidade total dos veículos. A mesma não faz distinção
os veículos. A mesma não faz distinção em relação aos diferentes tipos de
em relação aos diferentes tipos de veículos e seus custos relacionados.
stos relacionados.
O método
a seleção
dos paisNeste
é o método
da roleta.
do para a seleção
dos utilizado
pais é o para
método
da roleta.
método,
cada Neste método,
cada indivíduo
população
é representado
naaptidão.
roleta conforme
seu valor de aptidão.
ulação é representado
nada
roleta
conforme
seu valor de
Desta forma,
Desta
forma,
os
indivíduos
com
elevada
aptidão
receberão
um
intervalo maior na
m elevada aptidão receberão um intervalo maior na roleta, enquanto aqueles
enquanto
quenatêm
maisApós
baixaa aptidão
receberão
menor intervalo na
xa aptidãoroleta,
receberão
menoraqueles
intervalo
roleta.
distribuição
na roleta,
Após
distribuição
na roleta,
são gerados
aleatoriamente
números
oriamenteroleta.
números
noa intervalo
entre
0 e o total
do somatório
da aptidão
de no intervalo
entre
0
e
o
total
do
somatório
da
aptidão
de
todos
os
indivíduos
os da população. É gerado um determinado número de vezes, dependendo doda população. É
um determinado
vezes, dependendo
do tamanho
ulação. Ogerado
indivíduo
que possuir número
em seu de
intervalo
o número gerado
será da população.
O
indivíduo
que
possuir
em
seu
intervalo
o
número
gerado
será
selecionado para o
o cruzamento. Para o problema estudado foi considerado o cruzamento
o problema
estudado
foi considerado
cruzamento (crossover) de
m único cruzamento.
ponto. ParaPara
isso,
uma posição
dentro
do gene é oselecionada
um único ponto. Para isso, uma posição dentro do gene é selecionada aleatoriamente.
A partir daí, o restante dos genes são trocados entre os pais. A mutação ocorre com o
sorteio de dois genes dentro de um cromossomo que trocarão suas posições.
Após as etapas de cruzamento e mutação, o cromossomo resultante pode ter
violado a restrição de capacidade dos veículos (bins). Para reparar esse problema,
foi adotado um procedimento de reparo do cromossomo que consistiu em varrer
todos os veículos e guardar num vetor todos os itens que superaram a capacidade
dos veículos em que estavam alocados. Em seguida, os itens eram re-alocados nos
veículos que estivessem mais próximos de sua capacidade máxima, num movimento
similar à heurística de Best-Fit. Para os itens que não coubessem em nenhum dos
veículos ativos, torna-se necessária a alocação de veículos adicionais.
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
75
Como resultado, têm-se todas as entregas alocadas aos veículos, respeitando
restrições de capacidade. Alguns veículos que atendem a municípios distintos
podem estar parcialmente ocupados, o que leva a terceira fase, descrita a seguir,
que consiste em agrupar (ou roteirizar) clientes de municípios distintos.
5.2. Fases III: Agrupamento de cargas de cidades diferentes
Na Fase III, as distâncias são levadas em consideração para o agrupamento das
entregas remanescentes, para os veículos que não tiveram a sua carga completada.
Para tanto, algumas modificações são aplicadas ao algoritmo genético utilizado nas
fases I e II. Essas mudanças ocorrerão nas fases de geração da população inicial e na
função aptidão utilizada. O restante das fases permanece igual aos das fases I e II.
Tendo em vista que na Fase III as distâncias entre as cidades interferem na
escolha do melhor agrupamento de rotas, algumas heurísticas construtivas foram
adicionadas para formação da população inicial:
• Heurísticas Next-Fit, First-Fit e Best-Fit ordenadas pela menor distância
da cidade ao local de origem;
• Algoritmo de Clarke & Wright clássico e outras extensões do algoritmo
de economias propostas por Golden et al.(1984);
• Algoritmo do Vizinho Mais Próximo de Rosenkrantz et al. (1977).
Para considerar a distância na escolha da melhor solução, a função aptidão é
substituída pela equação abaixo:
N
f (S ) = ∑ fmaxi (7)
i =1
Onde N é o número de roteiros formados para a solução S; e fmaxi representa
o valor do maior frete encontrado dentre os pontos do roteiro i. Esta equação calcula
o custo total das viagens e, desta forma, quanto menor a função aptidão melhor é
a solução encontrada. Assim, na Fase III os indivíduos com menores valores de
aptidão são mantidos.
76
Transporte em Transformação XI
6. Experimentos Computacionais
Os experimentos computacionais foram divididos em três etapas. Na primeira,
é testado o algoritmo para resolução do problema de bin-packing, utilizado nas fases I
e II, com dados de benchmark extraídos de uma base de dados (OR-Library), descrita
por Beasley (1990). Na segunda etapa, o modelo completo é testado comparando a
um programa atual utilizado na empresa estudada. Por fim, os resultados do modelo
proposto são comparados a um modelo exato na terceira etapa. Os algoritmos que
compõem a estratégia de solução proposta foram implantados em linguagem C++,
utilizando o compilador DEV-C++. Os testes foram realizados em um computador
com processador Pentium Centrino 1.8 GHz, 512 MB RAM.
Avaliação das Fases I e II
Os dados de entrada de cada problema foram formados por itens de tamanhos
variados, uniformemente distribuídos entre 20 e 100, para serem alocados em bins
de capacidade igual a 150. Os resultados do algoritmo proposto foram comparados
com os resultados do método GGA (Grouping Genetic Algorithm) apresentado por
Falkenauer (1996) e com os resultados do procedimento MTP, proposto por Martello
e Toth (1990), que utiliza um método enumerativo (branch-and-bound) com um
critério de dominância embutido. A Tabela 1 apresenta os resultados da comparação
para 10 instâncias de problemas para agrupamento de 120 itens. A tabela mostra, para
cada uma das 10 instâncias: o número da instância (problema); o número mínimo
teórico (dado pelo quociente entre a soma dos tamanhos dos itens e a capacidade total
dos bins); e os respectivos resultados do algoritmo proposto, do GGA e do MTP, com
o número de bins utilizados e a perda em relação ao número teórico.
Tabela 1 - Resultados do algoritmo para resolução do BPP (120 itens)
Bins
teórico
48
49
46
49
50
48
48
49
50
46
Totais
Problema
1
2
3
4
5
6
7
8
9
10
Método proposto
Bins
Diferença
48
0
49
0
46
0
49
0
50
0
48
0
48
0
49
0
50
0
46
0
0
Bins
48
49
46
49
50
48
48
49
51
46
HGGA
Diferença
0
0
0
0
0
0
0
0
1
0
1
Bins
48
49
46
49
50
48
48
49
51
46
MTP
Diferença
0
0
0
0
0
0
0
0
1
0
1
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
77
Observando os resultados da Tabela 1, percebe-se que o método proposto
foi mais eficiente que o GGA de Falkenauer (1996) e o MTP de Martello e Toth
(1990), alcançando a solução ótima para todas as 10 instancias testadas. Entretanto,
o método proposto perdeu eficiência quando o número de itens foi aumentado
para 250, numa segunda comparação não apresentada no presente trabalho. Nesta
segunda etapa de testes, o algoritmo genético híbrido de Falkenauer (1996) obteve
os melhores resultados; mostrando ser mais eficiente até mesmo se comparado ao
método MTP na medida em que se aumenta a quantidade de itens.
Com isso, conclui-se que o algoritmo proposto fornece excelentes resultados
até uma certa quantidade de itens como dado de entrada. Levando-se em conta que
para o problema proposto no presente trabalho o número de itens agrupados em
cada fase do algoritmo é bem inferior a quantidade de itens testada acima, pode-se
concluir que este método proposto é ideal para o problema real.
Comparação com o procedimento atual
Numa segunda etapa, a abordagem completa proposta no presente trabalho
foi testada considerando dados reais de uma empresa de cimento. A abordagem foi
comparada a um método atualmente utilizado pela mesma, baseado em heurística
para agrupamento das cargas, chamado Pégasus.
O Pégasus é um método desenvolvido internamente, baseado em uma
heurística simples de agrupamento de cargas, cuja prioridade é encontrar a solução
que utiliza o menor número de veículos. Em segundo lugar, considera a menor
distância entre os pontos. Desta forma, o método oferece resultados muito bons,
mas apesar de poder trabalhar com uma base de dados de entrada relativamente
grande, possui a restrição de considerar somente frota homogênea. Esta deficiência
do Pégasus faz com que os operadores executem rotinas seguidas para cada tipo de
veículo, aumentando o tempo de operação e podendo reduzir significativamente a
qualidade da solução gerada.
Tendo em vista a limitação do Pégasus supramencionada, os dados de
entrada para comparação continham apenas clientes com o mesmo tipo de veículo
máximo permitido. Foram consideradas 15 instâncias reais para comparação, cada
qual representada por entregas pertencentes a um dia normal partindo de um único
depósito. Essas cargas estão espalhadas em diversos municípios num raio de até 500
km do centro. Os resultados foram comparados em relação ao número mínimo de
veículos designados para realizar as entregas e o custo total provindo do pagamento
do frete aos transportadores. Os resultados obtidos estão demonstrados na Tabela 2.
78
Transporte em Transformação XI
Tabela 2 - Resultados do algoritmo comparados ao modelo atual
Método Pegasus
Método Proposto
Variação
Teste
Quantidade
de entregas
Veículos
Custo
Veículos
Custo
Veículos
1
47
30
3,012
29
2,976
-1
-1.2%
2
53
30
3,285
30
3,234
0
-1.6%
3
69
24
22,278
23
21,561
-1
-3.2%
4
72
23
20,951
21
19,465
-2
-7.1%
5
55
20
17,741
19
17,245
-1
-2.8%
6
59
19
17,757
18
17,346
-1
-2.3%
7
56
21
19,835
20
19,447
-1
-2.0%
8
58
18
17,444
17
16,702
-1
-4.3%
Custo
9
75
25
22,996
24
22,453
-1
-2.4%
10
64
21
19,268
20
18,563
-1
-3.7%
11
60
18
17,287
17
16,868
-1
-2.4%
12
70
23
21,745
22
21,594
-1
-0.7%
13
46
15
14,417
13
12,996
-2
-9.9%
14
64
23
19,237
22
18,839
-1
-2.1%
15
51
18
17,014
16
15,434
-2
-9.3%
Média
60
22
16,951
21
16,315
-1
-3.7%
A partir dos resultados desta simulação, percebe-se que o método proposto
apresenta economias significativas em relação ao método Pégusus. Em média, o
método proposto apresentou uma economia média de 3.7% sobre o procedimento
atual. Além disso, para a maioria dos testes obteve menos veículos alocados, o que
pode representar um ganho extra em aumento de capacidade de transporte. Isso
comprova a eficiência do algoritmo proposto e a oportunidade de gerar economias
se aplicado na prática.
Comparação com o método exato
Na última etapa de testes, o desempenho do método proposto foi analisado
frente aos resultados obtidos com o modelo de programação matemática do problema
da seção 4. Foram consideradas todas as restrições impostas pelo problema,
inclusive a restrição quanto ao tamanho máximo de veículo utilizado. Entretanto,
este método só pode ser testado para problemas com poucas entregas, pois para
problemas maiores o mesmo incorria em tempos computacionais muito elevados.
A eficiência do método proposto foi analisada tomando-se oito instâncias reais. Os
dados de entrada foram retirados da situação real, sendo comparados custo e tempo
computacional requeridos por ambas as abordagens. O método exato foi resolvido
79
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
através do programa What’s Best 8.0, que utiliza a plataforma do Microsoft Excel
XP. A CPU utilizada é a mesma descrita para o método proposto. Os resultados são
apresentados na Tabela 3.
Tabela 3 – Resultados do algoritmo comparados ao modelo ótimo
Método Exato
Teste
Quantidade
de entregas
Custo
Tempo comp
(segundos)
Método Proposto
Custo
Tempo comp
(segundos)
Desvio
Custo
1
12
3257
90
3257
0,98
2
12
2443
12
2459
0,31
0,0%
0,7%
3
14
3217
4272
3217
0,81
0,0%
4
13
746
132
746
1,00
0,0%
5
13
709
42
709
0,33
0,0%
6
13
764
12
764
0,27
0,0%
7
13
740
96
740
0,61
0,0%
8
13
523
84
523
0,33
0,0%
Através dos resultados obtidos, observa-se que o método proposto atingiu
a solução ótima (menor custo) em sete dos oito problemas testados. Além disso,
nota-se que o método proposto obteve os resultados em tempos computacionais
bem inferiores ao método exato. Deve-se ressaltar que para um modelo para o qual
se pretende a utilização como uma ferramenta de nível operacional, tempos acima
de 1 minuto já são considerados muito elevados. Percebe-se também que para
alguns casos o tempo computacional cresce exponencialmente para os testes com
o método exato, apenas acrescentando uma entrega a mais aos dados de entrada,
como é o caso do teste 3. Este resultado mostra que o método proposto além de
apresentar resultados satisfatórios, é razoavelmente rápido; o que é fundamental
para que a utilização uma ferramenta de nível operacional seja viável quando
aplicada à prática.
7. Considerações Finais
O presente trabalho propôs a solução do problema de agrupamento de
entregas de cimento através da construção de um modelo heurístico, baseado em
métodos para resolução de problemas de “bin-packing” e roteirização de veículos.
Trata-se de um tema relevante, pois se levou em conta um modelo de tarifação
80
Transporte em Transformação XI
muito utilizado no Brasil para pagamento de transportadores terceiros. Além disso,
ofereceu uma abordagem interessante para o problema da falta de informações
quanto ao detalhamento na localização exata dos pontos de entrega.
Todos os testes comprovaram a eficiência do algoritmo proposto, bem como
sua boa aplicabilidade à prática. Pois, além de considerar a restrição que muitas
empresas apresentam quanto à ausência de mapas digitais para localização exata
de seus clientes, o método apresentou excelentes resultados em todas as etapas
dos experimentos, gerando ganhos em custos e capacidade da frota. E, finalmente,
obteve os resultados em tempos bem satisfatórios, fundamental para que se torne
uma ferramenta operacional no futuro.
Como recomendações para trabalhos futuros, sugere-se a alteração da
representação cromossômica utilizada no presente trabalho pela apresentada por
Falkenauer (1996) para resolução de problemas de “bin-packing”, através de
um algoritmo genético híbrido. Esta obteve resultados melhores para problemas
maiores, que pode ser o caso de algumas empresas. Outra recomendação é testar
mudanças nos operadores dos algoritmos genéticos como outros métodos de
seleção, crossover e mutação. A qualidade da população inicial também pode ser
melhorada utilizando outras heurísticas construtivas eficientes. Além disso, outras
metaheurísticas também podem ser testadas para resolução do problema de binpacking como Busca Tabu, Simulated Annealing, GRASP, dentre outras.
Modelagem Heurística no Problema de Distribuição de Cargas Fracionadas de Cimento
81
Referências Bibliográficas
Altinel, I.K. e Oncan, T. (2005) A New Enhancement of the Clarke and Wright Savings Heuristic for the Capacitated Vehicle Routing Problem. Journal of Operation Research Society, v. 56, p. 954-961.
Beasley, J.E. (1990) OR-Library: Distribution Test Problems by Electronic Mail.
Journal of the Operational Research Society, v. 41, p. 1069-1072.
Clarke, G e Wright, J.W. (1964) Scheduling of Vehicles from a Central Depot to a
Number of Delivery Points. Operations Research, v. 12, p. 568-581.
Desrochers, M. e Verhoog; T.W. (1991) A New Heuristic for the Fleet Size and Mix
Vehicle Routing Problem. Computers & Operations Research, v. 18, n. 3, p.
263-274.
Falkenauer, F. (1996) A Hybrid Grouping Genetic Algorithm for Bin Packing. Journal of Heuristics, v. 2, p. 5-30.
Fisher, M. e Jaikumar, R. (1981) A Generalized Assignment Heuristics for Vehicle
Routing. Networks, v. 11, n. 2, p. 109-124.
Garey, M.R.e Johnson, D.S. (1979). Computers and Intractability: A guide to the
Theory of NP-Completeness. W.H. Freeman, San Francisco.
Gillet, B.L. e Miller, L. (1974) A Heuristic Algorithm for the Vehicle Dispatch Problem. Operations Research, v. 22, n. 4, p. 340-349.
Golden, B.L.; Assad, A.; Levy, L e Gheysens, F. (1984) The Fleet Size and Mix
Vehicle Routing Problem. Computers & Operations Research, v. 11, n. 1, p.
49-65.
Holland, J. (1975) Adaptation in Natural and Artificial Systems. University of Michigan Press, Michigan, USA.
Kang, J. e Park, S. (2003) Algorithms for the Variable Sized Bin Packing Problem.
European Journal of Operation Research, v. 147, p. 365-372.
Landeghem, H.R.G. (1988) A Bi-criteria Heuristic for the Vehicle Routing Problem
with Time Windows. European Journal of Operational Research, v. 36, n. 2, p.
217-226.
Martello, S. e Toth, P. (1990) Knapsack Problems: Algorithms and Computer Implementations. Wiley.
Mole, R.H. e Jameson, S.R. (1976) A Sequential Route-building Algorithm Employing a Generalized Savings Criterion. Operational Research, v. 27, n. 2, p.
503-511.
Paessens, H. (1988) Savings Algorithms for the Vehicle Routing. European Journal
of Operational Research, v. 34, n. 3, p. 336-344.
82
Transporte em Transformação XI
Poh, K.L.; Choo K.W. e Wong, C.G. (2005) A Heuristic Approach to the Multi-period Multi-commodity Transportation Problem. Journal of Operation Research
Society, v. 56, p. 708-718.
Rosenkrantz, D.; Stearns, R. e Lewis, P. (1977) An Analysis of Several Heuristics
for the Traveling Salesman Problem. SIAM J. Comp., v. 6, p. 563-581.
Zhang, G. (1997) A New Version of On-line Variable-sized Bin Packing. Discrete
Applied Mathematics, v. 72, p. 193-197.
Endereço dos Autores:
Marcos Miura
Departamento de Engenharia de Transportes
Escola Politécnica da Universidade de São Paulo
Email: [email protected]
Cláudio Barbieri da Cunha
Departamento de Engenharia de Transportes
Escola Politécnica da Universidade de São Paulo
Email: [email protected]
Um Modelo para a Minimização dos
Custos Totais de Abastecimento
Considerando as Múltiplas Escalas das
Aeronaves nas Rotas de uma Empresa
Aérea Doméstica Brasileira
4
Engº José Alexandre Tavares Guerreiro Fregnani
Prof. Dr. Carlos Müller
Prof. Dr. Anderson Ribeiro Correia
Instituto Tecnológico de Aeronáutica
Departamento de Transporte Aéreo e Aeroportos (EIA-T)
Setembro de 2007
Resumo
Neste trabalho propõe-se um modelo de programação linear cujo objetivo é
determinar o abastecimento de quantidades ótimas de combustível ao longo de uma malha
de vôos de uma empresa aérea doméstica brasileira. Assumindo que não há restrições
de venda de volume ou capacidade de armazenamento em cada localidade, efetua-se a
análise para o caso de uma aeronave em um dia de sua programação, extrapolando os
resultados para projeções mensais e anuais. Através do modelo proposto, verifica-se que
tal técnica de tanqueamento de combustível provê ganhos econômicos da ordem de 5%,
porém produz um consumo adicional de combustível da ordem de 1%. Uma discussão
do impacto ambiental de tal procedimento também é proposta.
84
Transporte em Transformação XI
Abstract
This paper presents a linear programming model designed to determine the
optimum fuel loading quantities along a route network considering a Brazilian
domestic airline. Assuming that there are no volume purchase or storage capacity
restrictions on each station, the analysis is carried out for one aircraft in one day
of its schedule. Results are extrapolated to monthly and yearly basis. Through
the proposed model, it is verified that such fuel tankering technique provides 5%
economical savings, but produces 1% of additional fuel burn. An environmental
impact discussion is also proposed for such procedure.
1. Introdução
De acordo com recentes estudos realizados pela IATA (2004), o consumo de
combustível representa o segundo maior componente dos custos diretos operacionais
das empresas aéreas, seguindo apenas os custos referentes à mão de obra. Estima-se
que a participação do consumo de combustível atinja 20% ou mais sobre os custos
diretos operacionais totais de qualquer tipo de empresa aérea.
O ramo da aviação comercial tem como característica própria de se fazer
presente em mercados extremamente competitivos e com baixas margens de
lucro. Desta forma, as empresas aéreas que conseguirem gerenciar o consumo de
combustível de forma eficiente apresentarão, sem dúvida, vantagens competitivas
que poderão determinar sua sobrevivência.
Estima-se atualmente que, para cada dólar consumido em combustível, as
empresas aéreas tenham que gerar de 15 a 20 dólares em receita para obter a mesma
margem de lucro. Além disso, o preço do barril de petróleo tem experimentado um
dramático aumento desde o ano 2000.
Apesar dos avanços tecnológicos da indústria petrolífera haver possibilitado
a descoberta de novas fontes deste recurso, outros fatores de influência, sobretudo
de natureza geopolítica no Oriente Médio ou mesmo influências não convencionais,
tais como catástrofes naturais, têm contribuindo para a instabilidade e aumento
destes preços ao longo dos últimos anos. A evolução dos preços do combustível de
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
85
aviação segue sempre acoplada aos preços do barril de petróleo e, portanto, atenção
redobrada ao consumo de combustível tem sido dada por parte das empresas aéreas
nos últimos anos. Na Figura 1, pode-se verificar a tendência de aumentos de preços
médios anuais do barril de petróleo e do combustível de aviação até 2006, de acordo
com a Air Transport Association. Observa-se um aumento no preço médio do barril
de petróleo de US$ 26,01 no início de 2002 para US$ 66,02 ao final de 2006, ou
seja, um acréscimo de 152,95% em quatro anos, ou 3,19% ao mês. Estima-se que,
ao final de 2007, o preço do barril de petróleo possa atingir a marca dos US $ 90,00
caso tal tendência se mantenha.
Evolução de Preços
Barril de Petróleo x Querosene de Aviação
Fonte:Airline Transport Association of America (ATA) / US Department of Transportation
90
JET A1
80
US$/Barril
70
60
Óleo Cru
50
40
30
20
2008
2006
2004
2002
2000
1998
1996
1994
1992
1990
1988
1986
1984
1982
1980
1978
1976
0
1974
10
Ano
Figura 1: Evolução dos preços do barril de petróleo e querosene de aviação.
É prática cada vez mais comum nas empresas aéreas o estabelecimento
de programas de conservação de combustível, onde um conjunto de medidas
envolvendo as áreas de operações e de manutenção é criado com o objetivo de se
minimizar o consumo. De acordo com estudos efetuados pela EMBRAER (2005),
1% de economia de combustível pode ser facilmente atingido através de práticas
operacionais coerentes. Procedimentos operacionais com foco em conservação
de combustível são de fácil execução e não envolvem grandes investimentos, na
86
Transporte em Transformação XI
maioria das vezes concentrando-se apenas no treinamento de pilotos e despachantes
operacionais. Um dos procedimentos mais comuns adotado pelas empresas aéreas
é o chamado “Abastecimento Econômico” ou “Tanqueamento de combustível”, a
ser apresentado a seguir.
2. Procedimento para tanqueamento de combustível
Variações de preço de combustível em cada localidade, uma eventual ausência
deste recurso (como, por exemplo, operações em aeroportos remotos) ou restrições
contratuais com as empresas abastecedoras ao longo de malha de vôos pode resultar
em se transportar maior quantidade de combustível que o mínimo requerido pela
regulamentação a partir de determinadas localidades, de modo a se minimizar os
custos de abastecimento. A prática de carregar uma quantidade extra de combustível é
denominada de “Tanqueamento de Combustível” ou “Abastecimento Econômico”.
Como a quantidade de combustível extra carregado resulta em peso extra
na aeronave e, portanto, produz um consumo adicional de combustível na referida
etapa, é importante se analisar os custos de transporte deste peso adicional de
combustível. Geralmente, as empresas aéreas analisam a viabilidade econômica
de transporte de combustível etapa por etapa, para cada aeronave. Em cada etapa,
caso o tanqueamento seja viável, programa-se abastecer a aeronave na origem com
tal quantidade de combustível extra de modo que o combustível remanescente
no destino seja exatamente o combustível regulamentar mínimo para a próxima
etapa, calculado de acordo com o item 121.645 do Regulamento Brasileiro de
Homologação Aeronáutica (RBHA) parte 121. Além disso, devido ao peso adicional
que a operação impõe às aeronaves, alguns requisitos devem ser respeitados em
cada etapa onde o combustível extra é tanqueado: o Peso Máximo de Decolagem
(PMD) no aeroporto de origem não pode ser excedido, o Peso Máximo de Pouso
(PMP) no aeroporto de destino não pode ser excedido e a capacidade máxima de
abastecimento da aeronave não pode ser excedida
No Brasil, o procedimento de tanqueamento de combustível é uma prática
bastante comum, uma vez que existe uma grande variação de incidência da alíquota
de ICMS sobre combustíveis de aviação entre estados (variações de 4% a 25% são
esperadas). As empresas aéreas geralmente recorrem à análise pontual, etapa por
etapa, para estudarem a viabilidade de efetuarem o tanqueamento de combustível.
Efeitos de rede, tais como a minimização do custo de todos os abastecimentos ao
longo da programação de uma aeronave em uma malha de vôos, de forma integrada
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
87
e simultânea, não são ainda avaliados. Muitas vezes, a análise de preço break
even não é sistematizada e geralmente efetua-se a operação de tanqueamento de
combustível apenas onde os preços de combustível são mais baratos. Preocupações
por consumos adicionais são ignoradas por certos operadores.
3. Revisão Bibliográfica
A EMBRAER (2006b) sugere a análise de viabilidade econômica para
tanqueamento de combustível em uma única etapa comparando-se o preço break
even (Pdeq), determinado através de ábacos e tabelas no manual de operações das
aeronaves, com o preço real de combustível no destino (Pd). Caso o preço real
do combustível no destino seja superior ao preço break even, é economicamente
viável o tanqueamento de combustível extra no aeroporto de origem. Sugere-se
que a quantidade abastecida na origem seja tal que, ao se pousar no destino, o
combustível remanescente seja exatamente o combustível mínimo regulamentar
para a etapa seguinte. O preço braek even no destino é determinado pelas seguintes
relações:
Pdeq
Onde Pdeq
P0
f
dWf
dW
Po
(1 f )
(1)
f
dWf
dW
(2)
: Preço break even no destino.
: Preço do Combustível na origem.
: Fator de ajuste de consumo de combustível.
: Variação de combustível consumido [kg].
: Variação de peso da aeronave em [kg].
O fator f é sensível ao tamanho da etapa, altitude e velocidade de cruzeiro e vento
médio da etapa. Geralmente é um fator informado pelos sistemas informatizados
de planejamento de navegação como Fator de Ajuste de Consumo (ou Fuel Burn
Adjustment) sob a forma de percentual. Valores entre 3% e 5% são esperados para
etapas curtas e médias (até 1.000 NM) para aeronaves regionais com capacidade
para 70 a 110 assentos. Nos manuais de vôo destas aeronaves, encontram-se ábacos
para a determinação do fator f, bem como Pdeq.
88
Transporte em Transformação XI
Saboya (1992) sugere a comparação entre os preços break even e real do
combustível no destino, de maneira idêntica ao fabricante de aeronaves, ou seja,
etapa por etapa. Porém desenvolve um algoritmo para a produção do fator f a partir
das informações disponíveis nos manuais de vôo de quaisquer tipos de aeronaves. Tal
algoritmo consiste na determinação do acréscimo percentual médio de consumo em
relação a um peso de pouso de referência inferior ao Peso Máximo de Estrutural de
Pouso (PMEP) para uma determinada etapa. Para isto, leva em conta a hipótese que
o consumo adicional percentual nesta faixa de pesos é aproximadamente constante.
Os percentuais obtidos serão os próprios valores do fator f. Padilla (1996) sugere
que se faça a verificação de viabilidade econômica de se transportar quantidades
adicionais de combustível através da análise da área abaixo da curva de alcance
específico em função do peso.
Stroup e Lackey (1975) provêm modelo de decisão para indicar onde
efetuar o procedimento de tanqueamento de combustível ao longo de uma malha
de vôos. Consideram restrições de localidade e fornecedores, além do preço dos
combustíveis. Utilizam o fator f constante em sua análise. Darnell e Loflin (1977)
determinam uma estratégia ótima para abastecimento a ser usada a curto e médio
prazo. Desenvolvem um modelo de escolha que fornece os melhores lugares e
fornecedores para cada etapa baseando-se em: preços, disponibilidade, consumo,
custos de tanqueamento (considerando fator f constante) e dados reais dos vôos em
questão. Stroup e Wollmer (1991) apresentam um modelo genérico que minimiza os
custos de abastecimento de uma malha de vôos suprida por vários tipos de aeronave,
através de um modelo de programação linear, assumindo fator f constante. As
decisões de abastecimento são baseadas em preços de combustível e em restrições
de fornecimento nos aeroportos. Caso o problema seja limitado apenas a preços de
combustível, o problema pode ser transformado em um problema de rede puro. Neste
modelo, estimam de 5% a 6% de economia em abastecimento utilizando este tipo de
resolução. Zouein et. al (2002) apresentam um modelo de decisão para determinação
da quantidade de combustível a ser abastecida em uma aeronave ao longo de cada
aeroporto de sua programação, considerando-se um determinado horizonte de
planejamento no tempo. Tal problema é modelado como um problema de inventário
de período múltiplo e resolvido usando-se programação linear. As restrições de
peso e capacidades consideradas em cada trecho são as seguintes: Peso Máximo de
Decolagem (PMD), Peso Máximo de Pouso no destino (PMP), Capacidade Total
de Combustível e Combustível de Segurança Mínimo (remanescente no destino).
Efetua-se uma análise para cada aeronave de uma frota ao longo das escalas de sua
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
89
programação diária. O fator f é determinado como função linear do peso para cada
etapa, obtendo ganhos econômicos da ordem de 10%. Finalmente, Abdelghany et.
al (2004) desenvolveram um modelo de programação linear para abastecimento em
múltiplas localidades, considerando um fator f constante o e aplicando-o a vários
cenários de preços. Analisam os cenários de múltiplo abastecimento e o de trecho
a trecho. Obtém valores de ganhos econômicos na faixa de 0.5% para a análise de
trecho a trecho e 3% para a análise de múltipos trechos.
4. Modelo Proposto
Seja a programação diária para um conjunto de aeronaves em uma malha de
vôos de uma empresa aérea. Para cada aeronave, é definida uma programação diária
com N aeroportos e i trechos a serem cumpridos, com i = 1,..,N-1, de acordo com
a Figura 2.
trecho 1
Localidade 1
P1
trecho N-2
trecho 2
Localidade 2
P2
Localidade i
Pi
trecho N-1
Localidade N-1
PN-1
Localidade N
PN
Figura 2: Programação de vôos para cada aeronave em uma malha aérea
Considera-se também que, para cada aeroporto, é pré-definido o preço do
combustível Pi [kg]. O problema consiste em se determinar qual é a quantidade de
combustível que se deve abastecer em cada aeroporto a fim de se minimizar o custo
total da operação de cada aeronave. As seguintes restrições operacionais devem ser
obedecidas:
i. O Peso Máximo de Decolagem nos aeroportos de origem não deve ser
excedido.
ii. O Peso Máximo de Pouso nos aeroportos de destino não deve ser
excedido.
iii. A Capacidade Máxima de Combustível da aeronave não deve ser
excedida.
iv. O combustível abastecido não deve ser inferior ao mínimo requerido
pela regulamentação.
90
Transporte em Transformação XI
v. O combustível remanescente nos destinos não deve ser inferior ao
combustível de reserva mínimo definido pela política operacional da
empresa.
Consideramos ainda as seguintes hipóteses:
i. Haverá um único fornecedor de combustível, determinado
contratualmente, em cada localidade. Tal hipótese é bastante razoável,
uma vez que as empresas aéreas sempre optam pelo fornecedor mais
barato.
ii. Não haverá restrições contratuais de volume total de combustível
comprado ao longo da malha de vôos para um determinado fornecedor.
Ou seja, a venda de combustível é ilimitada.
iii. Todas as localidades serão capazes de prover a quantidade necessária
de combustível para todos os vôos. Ou seja, não haverá restrições de
capacidade de armazenamento de combustível para atender a todas as
aeronaves que passem por cada localidade.
Desta forma, o abastecimento de cada aeronave não interfere no
abastecimento das outras ao longo da malha de vôos. Isso permite tratar cada
aeronave separadamente em sua programação. O custo de abastecimento total da
malha de vôos será a somatória dos custos de abastecimento de cada aeronave.
A resolução deste problema será efetuada através de um modelo de programação
linear para minimização do custo total de abastecimento ao longo das N localidades
da programação diária de cada aeronave. A variável de decisão é a quantidade de
combustível a se abastecer (Xi) para cada trecho i, na localidade i, com i=1,..N-1.
Para cada aeronave, em sua programação diária, pode-se formular o seguinte
modelo de programação linear:
Função objetivo:
Min Z = Σ Pi*Xi
para i = 1,...,N-1
(3)
Obedecendo às seguintes restrições:
i. Restrição de Peso Máximo de Decolagem (PMD): PZCi + FOBi ≤ PMDi para i = 1,..,N-1
(4)
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
vi.
91
ii. Restrição de Peso Máximo de Pouso (PMP):
PDi – TRIPi ≤ PMPi
para i = 1,..,N-1
(5)
iii. Restrição de máxima capacidade de combustível da aeronave:
REM i + Xi ≤ MAXF
para i = 1,..,N-1
(6)
iv. Restrição de combustível regulamentar mínimo para a etapa i:
para i = 1,..,N-1
REM i + Xi ≥ FOB0i
(7)
v. Restrição de combustível remanescente mínimo no destino:
FOBi-1 – TRIPi-1 ≥ MINFi
para i = 2,..,N
(8)
vi. Ajuste de consumo pelo fator f:
Ajuste de consumo pelo fator f:
dWf ≈
� (TRIPii – TRP0ii)/(FOB
)/(FOBii-FOB0
-FOB0ii)) para ipara
i = 1,..,N-1
= 1,..,N-1
ffi
i =
dW
dW
(9)
vii.
vii. Definição de combustível a bordo na localidade de origem:
Definição de combustível a bordo na localidade de origem:
FOBi = REMi + Xi para i = 1,..,N-1
FOBi = REM
para i = 1,..,N-1
i + Xi
(10)
(10)
viii.
viii. Definição do combustível remanescente no destino:
Definição do combustível remanescente no destino:
– TRIPi-1 parai =
i =1,..,N-1
1,..,N-1
i-1i-1
REMi = REM
FOBii-1=– FOB
TRIP
para
(11)
(11)
ix.
ix. Positividade
dos valores
de abastecimento:
Positividade
dos valores
de abastecimento:
Xi
≥
0
Xi � 0
Onde:
(9)
(12) (12)
Onde:
fi: Constante de Ajuste de Combustível.
FOB0fi:i: Combustível
Constante deregulamentar
Ajuste de Combustível.
mínimo no trecho i [kg].
FOB
total
a
bordo
no
trecho no
i [kg]
FOB0i:i: Combustível
Combustível regulamentar mínimo
trecho i [kg].
MAXF: Máxima Capacidade de Combustível nos tanques [kg].
FOB : Combustível total a bordo no trecho i [kg]
MINFi:i Combustível remanescente mínimo do trecho i [kg].
MAXF: Máxima Capacidade de Combustível nos tanques [kg].
PDi: Peso de decolagem no trecho i em [kg].
MINF
Combustível
remanescente
mínimode
doorigem
trecho no
i [kg].
Pi:i: Preço
do combustível
no aeroporto
trecho i [US$/kg].
PDii:: Peso
Peso Máximo
de decolagem
no trecho
i em [kg].[kg].
PMD
Estrutural
de Decolagem
PMPPi:i: Peso
Estrutural
Pouso [kg].
PreçoMáximo
do combustível
node
aeroporto
de origem no trecho i [US$/kg].
PMZC
:
Peso
Máximo
Zero
Combustível
[kg].
i
PMDi: Peso Máximo Estrutural de Decolagem [kg].
PP : Peso de Pouso no trecho i [kg].
PMPi : Peso Máximo Estrutural de Pouso [kg].
PZCi:i Peso Zero Combustível no trecho i [kg].
PMZCi: Peso Máximo Zero Combustível [kg].
REM
i: Combustível remanescente após o pouso no trecho i [kg].
TRIP0i: Consumo da etapa i com combustível mínimo regulamentar [kg].
TRIPi: Consumo da etapa no trecho i [kg].
Xi: Combustível a ser abastecido no trecho i [kg].
92
Transporte em Transformação XI
PPi: Peso de Pouso no trecho i [kg].
Peso Zero Combustível no trecho i [kg].
REMi: Combustível remanescente após o pouso no trecho i [kg].
TRIP0i: Consumo da etapa i com combustível mínimo regulamentar [kg].
TRIPi: Consumo da etapa no trecho i [kg].
Xi: Combustível a ser abastecido no trecho i [kg].
PZCi:
Observa-se que as equações referentes a uma etapa i são combinações lineares
das equações referentes à etapa anterior (i-1), provendo ao modelo um caráter
recursivo. Verifica-se também que o número de restrições é função do número
de localidades envolvidas: para N localidades, são geradas 5.(N-1) restrições,
considerando-se as equações 4 a 8. Quanto às equações 9 a 11, estas apenas
definem algumas das variáveis envolvidas nestas restrições. Considerando que as
malhas de vôos de empresas aéreas regionais e domésticas brasileiras apresentam
tipicamente de 4 a 12 etapas diárias para cada aeronave, observa-se que o modelo
de programação linear proposto apresenta de 20 a 60 equações de restrições. Isto
nos leva à conclusão de que um algoritmo robusto de resolução se faz necessário.
No modelo proposto, a novidade em relação aos demais encontrados na literatura
será a forma com que o fator f será modelado: representação polinomial em função
da distância e altitude de cruzeiro para um determinado perfil de velocidades em
cada trecho considerado. A influência do peso da aeronave estará embutida em tal
modelagem.
5. Aplicação do Modelo
A partir de uma malha de vôos fornecida por uma empresa aérea doméstica
brasileira e sua respectiva programação para uma aeronave para um dia, utilizamos
o modelo proposto para determinar o abastecimento ótimo em doze trechos. Os
preços de combustível em cada base também foram fornecidos, já convertidos para
custo por kg, utilizando-se para isto uma densidade de 0,785 kg/l. Os valores foram
informados em dólares americanos.
Consideramos a utilização de um único modelo de aeronave regional com
capacidade para 108 assentos, equipada com motores GE CF34-10E6 que desenvolve
18500 lbf de tração máxima de decolagem ao nível do mar, em condições ambientais
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
93
ISA (International Standard Atmosphere). O Software de modelagem Advanced
Integrated Multidimensional Modeling Software (AIMMS) foi usado como
ferramenta para a resolução do problema de programação linear, devido sua natureza
recursiva. O custo total de abastecimento obtido (extrapolado para o período de um
mês) foi comparado ao custo total do abastecimento “convencional”, onde cada
localidade é abastecida com a quantidade de combustível mínimo regulamentar.
As seguintes fontes de dados de entrada foram consideradas:
• Informações de Aeroportos: Provenientes do manual AIP Brasil ou
informadas pelo administrador de aeroporto.
• Características das aeronaves: Retiradas do Manual de Operações as
seguintes informações: Pesos Máximos Estruturais Zero Combustível
(PMEZC), de Decolagem (PMED), de Pouso (PMEP) e Capacidade
de combustível máxima (MAXF). O gráfico de Planejamento de Vôo
Simplificado em regime de Long Range Cruise (Anexo I) foi utilizado
para a determinação do consumo envolvido cálculo do fator f.
• Peso Zero Combustível (PZCi): Foi estimado através do Load Factor
médio de 65% e 500 kg de carga nos porões em todas as etapas. Foi adotado
o peso médio do passageiro de 85 kg, com 5 kg de bagagem de mão e 20 kg
de bagagem despachada e Peso Básico operacional (PBO) de 27400 kg. O
valor de PZC considerado para todas as etapas foi de 35600 kg.
• Pesos Máximos de Decolagem e Pouso (PMDi e PMPi) :Foram
determinados através do software específico para cálculo de desempenho
de decolagem e pouso produzido pelo fabricante da aeronave. Para este
cálculo, foram consideradas as temperaturas de referência, vento calmo e
as cabeceiras estatisticamente mais utilizadas em cada aeroporto.
• Consumo sem Tanqueamento (TRIP0i) e Combustível Mínimo
Regulamentar (FOB0i): Foram determinados através do software
específico para cálculo de planejamento de navegação produzido pelo
fabricante da aeronave. Para efeito de planejamento do vôo as seguintes
premissas foram consideradas:
i. As altitudes de cruzeiro, na medida do possível, corresponderam
àquelas de menor consumo específico. Entretanto foram respeitadas
as altitudes mais adequadas para os rumos e limites superiores das
aerovias utilizadas, bem como as altitudes máximas permitidas pelo
desempenho da aeronave.
ii. As reservas regulamentares foram calculadas de acordo com o RBHA
94
Transporte em Transformação XI
121.645 referentes a vôos por instrumento em empresas aéreas
regulares de transporte de passageiros.
iii. Os aeroportos de alternativa foram considerados distantes, no máximo,
200 NM do aeroporto de destino.
iv. Para cada rota considerada foram utilizados ventos e temperaturas em
cruzeiro de estatística anual com significância de 85%. Para isto foi
consultada referência BOEING (1992).
v. As distâncias em aerovia foram retiradas das cartas de navegação por
instrumentos publicados pelo DECEA para o espaço aéreo superior
(H1) e inferior (L1).
• Combustível Remanescente: O combustível mínimo de pouso no
destino (MINFi) foi considerado 2.000 kg em todas as etapas. Este valor
foi também adotado como remanescente na primeira etapa (REM1).
A determinação do fator f para cada trecho i considerado é essencial para
a resolução do problema. Para isto, adotamos a metodologia citada por Saboya
(1992):
i. Escolher um valor de peso de pouso de referência. Foi considerado
como referência 36000 kg, que corresponde aproximadamente ao
PZC do estudo.
ii. Utilizando-se do gráfico de Análise de Rota Simplificados para o
regime de Long Range Cruise presente no Manual de Operações da
aeronave, calcular o consumo para cada combinação de pesos de
pouso, altitudes e distâncias previamente estabelecidas. Os seguintes
intervalos foram considerados:
• Distâncias: 200, 400, 600, 800,1000 e 1200 NM.
• Altitudes: 15000, 20000, 25000, 30000, 35000, 39000 e 41000 ft.
• Pesos: 36000 (peso de referência), 38000, 40000, 42000 e 43000
(PMEP) kg.
iii. Para cada conjunto de pesos para um dado par distância e altitude,
calcular a diferença percentual de consumo em relação ao peso de
referência neste conjunto. A média dos desvios percentuais será o
fator f referente à respectiva combinação de altitude e distância. Notase que, desta forma, a variável peso não tem mais papel direto nos
cálculos de f.
Esta metodologia assume a hipótese de que a influência do peso tem menor
magnitude do que a influência da distância e/ou altitude no consumo adicional
o
Pesos: 36000
(peso de
referência), 38000,
40000, 42000
e 43000 (PMEP)
kg.
o
o Pesos:
Pesos: 36000
36000 (peso
(peso de
de referência),
referência), 38000,
38000, 40000,
40000, 42000
42000 ee 43000
43000 (PMEP)
(PMEP) kg.
kg.
Para
cada
conjunto
de
pesos
para
um
dado
par
distância
ee altitude,
calcular
aa diferença
Para
cada
conjunto
de
pesos
para
um
dado
par
distância
altitude,
calcular
diferença
Para cada conjunto de pesos para um dado par distância e altitude, calcular a diferença
percentual
de consumo
em relação
ao peso
de referência
neste conjunto.
A
média dos
percentual
relação
peso
conjunto.
A
percentual de
de consumo
consumo
em
relação
ao
peso de
dedosreferência
referência
neste
conjunto.
A média
médiaasdos
dos
Umem
Modelo
para a ao
Minimização
Custos Totaisneste
de Abastecimento
Considerando
desvios
percentuais
será
o
fator
f
referente
à
respectiva
combinação
de
altitude
e
desvios
percentuais
será
o
fator
f
referente
à
respectiva
combinação
de
altitude
Múltiplas
Escalas
das
Aeronaves
nas
Rotas
de
uma
Empresa
Aérea
Doméstica
Brasileira
desvios percentuais será o fator f referente à respectiva combinação de altitude ee 95
distância.
Nota-se
que,
desta
forma,
a
variável
peso
não
tem
mais
papel
direto
nos
distância.
distância. Nota-se
Nota-se que,
que, desta
desta forma,
forma, aa variável
variável peso
peso não
não tem
tem mais
mais papel
papel direto
direto nos
nos
cálculos
de
f.
cálculos de
de f.
f.
cálculos
etodologia
assume aa hipótese
de
que
a influência do
peso tem
menor
magnitude
do que
etodologia
de
que
do
menor
magnitude
que
deassume
combustível.
Desta
pode-se adotar
umtem
valor
médio
do fatordo
f para
etodologia
assume
a hipótese
hipótese
de forma
que aa influência
influência
do peso
peso
tem
menor
magnitude
do
que um
ência
da
distância
e/ou
altitude
no
consumo
adicional
de
combustível.
Desta
forma
ência da
da conjunto
distância de
e/ou
altitude
no consumo
consumo
adicional
dedecombustível.
combustível.
Desta
forma de
ência
distância
e/ou
altitude
no
forma
pesos
próximos
ao Pesoadicional
Máximode
Pouso, dadaDesta
combinação
ee adotar
um
valor médio
do fator
ff para
um
conjunto de
pesos
próximos ao
Peso
um
médio
um
pesos
ao
e adotar
adotar altitude
um valor
valor
médio do
doNafator
fator
f para
para
um conjunto
conjuntoo de
de
pesos próximos
próximos
ao Peso
Peso
e distância.
Tabela
1, apresentamos
resultado
completo
para
todas
o
de
Pouso,
dada
combinação
de
altitude
e
distância.
Na
Tabela
1,
apresentamos
oo as
mo de
de Pouso,
Pouso,
dada
combinação
de
altitude
e
distância.
Na
Tabela
1,
apresentamos
mo
dada
combinação
de
altitude
e
distância.
Na
Tabela
1,
apresentamos
o
altitudes.
do
completo
para
todas
as
altitudes.
do
completo
para
todas
as
altitudes.
do completo para todas as altitudes.
Altitude [ft]
Dist
Altitude
Dist
Altitude [ft]
[ft]
Dist
Altitude
[ft]
Dist
15000
20000
25000
30000
37000
39000
41000
[NM] 15000 20000 25000 30000 35000 3700035000
[NM]
39000 41000
[NM]
[NM]
[NM]
200
200
200
400
200
400
400
600
400
600
600
800
600
800
800
1000
800
1000
1000
1200
1000
1200
1200
1200
15000 20000
20000 25000
25000
15000
1,30%
1,19%
1,30%
1,19%
1,07%
1,30%
1,07%
2,94%1,19%
1,30%
1,19%2,68%
1,07%
2,94%
2,68%
2,43%
2,94%
2,68%
2,43%
4,60%2,68%4,19%
2,94%
2,43%
4,60%
4,19%
3,81%
4,60%
4,19%5,71%
3,81%
6,28%4,19%
4,60%
3,81%
6,28%
5,71%
5,19%
6,28%
5,19%
7,96%5,71%
6,28%
5,71%7,24%
5,19%
7,96%
7,24%
6,58%
7,96%
7,24%
6,58%
9,67%7,24%8,79%
7,96%
6,58%
9,67%
9,67% 8,79%
8,79% 7,97%
7,97%
9,67%
8,79%
7,97%
30000
30000
1,07%
0,99%
0,99%
2,43%
0,99%
2,24%
2,24%
3,81%
2,24%
3,50%
3,50%
5,19%
3,50%
4,77%
4,77%
6,58%
4,77%
6,06%
6,06%
7,97%
6,06%
7,35%
7,35%
7,35%
35000 37000
37000 39000
39000
35000
0,99%
0,94%
0,94%
0,94%
2,24% -- 2,12%-0,94%
2,12%
2,10%
2,10%
2,12%
2,10%
3,50%2,10%
2,12%
2,10%3,30%
2,10%
3,30%
3,26%
3,24%
3,30%
3,26%
3,24%
4,77%3,26%4,51%
3,30%
3,24%
4,51%
4,45%
4,43%
4,51%
4,43%
6,06%4,45%
4,51%
4,45%5,75%
4,43%
5,75%
5,71%
5,72%
5,75%
5,71%
5,72%
7,35%5,71%7,05%
5,75%
5,72%
7,05%
7,05% 7,05%
7,05% 7,14%
7,14%
7,05%
7,05%
7,14%
41000
41000
-2,10%
2,12%
2,12%
3,26%
2,12%
3,26%
3,26%
4,45%
3,26%
4,45%
4,45%
5,71%
4,45%
5,78%
5,78%
7,05%
5,78%
7,32%
7,32%
7,32%
2,10%
3,24%
4,43%
5,72%
7,14%
2,12%
3,26%
4,45%
5,78%
7,32%
Tabela 1: Fator f em função de distância e altitude
Tabela
1:
Fator ff em
função de
distância ee altitude
Tabela
1:
Tabela 1: Fator
Fator f em
em função
função de
de distância
distância e altitude
altitude
A fim de tornar o cálculo exato do fator f mais exeqüível do ponto de vista
de
tornar oo cálculo
exato do
fator
f mais
exeqüível
do
ponto de
vista computacional,
aa
de
fator
mais
exeqüível
do
de
Tabela
então modelada
sob a forma
de tornar
tornar computacional,
o cálculo
cálculo exato
exatoado
do
fator 2ff pode
mais ser
exeqüível
do ponto
ponto convenientemente
de vista
vista computacional,
computacional,
a
22 pode
ser
então
modelada
convenientemente
sob
a
forma
polinomial
(cúbica)
através
então
sob
aa forma
2 pode
pode ser
ser
então modelada
modelada
convenientemente
sob
formadepolinomial
polinomial
(cúbica) através
através
polinomial
(cúbica)convenientemente
através do seguinte
conjunto
equações: (cúbica)
uinte
conjunto de
equações:
uinte
uinte conjunto
conjunto de
de equações:
equações:
ff == A
+A
.didi ++ A
.didi 22222 ++ A
.didi 33333
f =A
A00000 +
+A
A11111..di
di + A
A22222..di
di + A
A33333..di
di
2222 + A .Hi 3333
A
=
A
+
A
.
Hi
+
A
.
Hi
2
A
=
A
+
A
.
H
i
+
A
.
H
i
+
iHi
A
A
00 +
01..Hi
02 ..Hi
03...H
A000000 =
=A
A000
+A
A0101
Hi +
+A
A0202
Hi 2 +
+A
A0303
Hi 33 00
01
02
03
00
01
02
03
00
01
02
03
22
3
222 + A .Hi 3333
A11 == A
A10 ++ A
A11
.H
Hi
+A
A12
.H
Hi
13
2+
3
Hi
Hi
Hi
A
.
i
+
.
i
A
.
H
i
11
12
13
A1111 = A1010
+
A
.
Hi
+
A
.
Hi
+
A
.
Hi
10
11
12
13
111
1212
1313
10
10
11
12
13
22
33
2
A
=
A
+
A
.
Hi
+
A
.
Hi
+
A
.
Hi
22 + A23
333
22 = A20
21
22
A
+
A
Hi
+
A
Hi
Hi
20 +
21..H
22..H
23..H
Hi
Hi
Hi
A
=
A
A
i
+
A
i
+
A
i
2
20
21
22
23
A222 = A2020
+ A222
+ A2323
20 + A2121
21 .
22 .
23 .
22
33
2
3
A
=
A
+
A
.
Hi
+
A
.
Hi
+
A
.
Hi
22
33
A
A
A
A
30 +
31..Hi
32 ..Hi
33 ..Hi
A333333 ==
=A
A3030
+A
A31
+A
A3232
+A
A333
30
31
32
33
A
iHi ++
iHi 2 ++
iHi3 30
32
33
30 + A3131
31.H
32.H
33.H
Para
i
=
1,..,N-1
Para
Para ii =
= 1,..,N-1
1,..,N-1
Para i = 1,..,N-1
(14)
(14)
(14)
(14)
(15)
(15)
(15) (15)
(16)
(16) (16)
(16)
(17)
(17)
(17) (17)
(18)
(18)
(18) (18)
Onde di
: Distância na etapa i [NM].
Hi : Altitude de cruzeiro na etapa i [ft].
Amn : Coeficientes de ajuste. Para m=[0..3] e n=[0..3].
Aplicando o método dos Mínimos Quadrados para duas dimensões, os
valores de Amn para o caso analisado podem ser determinados. A Tabela 2 mostra
seus valores. O Coeficiente de Correlação (R²) considerando estes coeficientes é de
0,9998, o que julgamos ser adequado para a resolução do problema proposto.
a na etapa i [NM].
de cruzeiro na etapa i [ft].
ntes de ajuste. Para m=[0..3] e n=[0..3].
Transporte em Transformação XI
96
dos Mínimos Quadrados para duas dimensões, os valores de Amn para o
m ser determinados. A Tabela 2 mostra seus valores. O Coeficiente de
iderando estes coeficientes é de 0,9998, o que julgamos ser adequado
m
oblema proposto.
Amn
mn
0
1
2
3
0
-3,7858E-03
8,1052E-05
5,0303E-08
-3,0389E-11
0
1
0
-3,7858E-03
3,2574E-09
1 m 8,1052E-05
1,7169E-09
n1
3
3
2
5,0303E-08
-6,6826E-12
3,2574E-09
2,9702E-12
-5,4218E-17
3
-3,0389E-11
4,3148E-15
1,7169E-09 -1,5362E-13 2,4814E-18
-6,6826E-12 2,9830E-16 -4,3019E-21
Tabela
2: Coeficientes de interpolação
4,3148E-15 -1,9807E-19 2,9187E-24
3
2,9702E-12
-1,5362E-13
2,9830E-16
-1,9807E-19
3
-5,4218E-17
2,4814E-18
-4,3019E-21
2,9187E-24
(Amn) da função f = f (d, H).
acordo com a(A
BOEING
(1998a), se considerarmos o efeito do vento médio
2: Coeficientes De
de interpolação
mn) da função f = f (d, H).
ao longo da rota, a distância (di) considerada nas tabelas acima deve ser interpretado
como sendo
a distância percorrida
aeronave
na da
massa de ar, o que é
OEING (1998a),
se considerarmos
o efeito dopela
vento
médio dentro
ao longo
diferente
da
distância
percorrida
pela
aeronave
no
solo
em
função
considerada nas tabelas acima deve ser interpretado como sendo a do vento em rota.
É necessária
correção
ao solo (ou distância
pela aeronave
dentro uma
na massa
de na
ar,distância
o que épercorrida
diferente em
da relação
distância
total
rota) ado
fimvento
de seem
prover
valor de “d”
ave no solo
emdafunção
rota. um
É necessária
umaequivalente,
correção nalevando em conta a
componente
do
vetor
de
vento
médio
projetado
ao
longo
do eixo longitudinal da
m relação ao solo (ou distância total da rota) a fim de se prover
um valor
aeronave
e a velocidade
verdadeira
(TAS)
ao longo
evando em
conta a(Vw)
componente
do vetor
de ventomédia
médio
projetado
ao da rota. A seguinte
relação
é
aplicável:
dinal da aeronave (Vw) e a velocidade verdadeira média (TAS) ao longo
lação é aplicável:
TAS i
(19)
(
)
(19)
d i = Di ..(
Vw
TAS i + V
w i
de verdadeira média da aeronave para o trecho i [kt].
nte do vetor deOnde
ventoTAS
médio
de cruzeiro
projetadomédia
no eixo
longitudinal
:Velocidade
verdadeira
da aeronave
para o trecho i [kt].
i
ara o trecho i Vw
[kt]. Componente
Valores negativos
representam
ventos
decruzeiro
proa e projetado no eixo
do
vetor
de
vento
médio
de
i:
entam ventos
de cauda.
longitudinal
da aeronave para o trecho i [kt]. Valores negativos representam ventos
percorridade
noproa
soloe(ou
em aerovia)
em NM
para odetrecho
positivos
representam
ventos
cauda.i. Adotamos os
dos nas cartas de
altitude para
vôos(ou
por em
instrumentos.
Dinavegação
: Distânciaem
percorrida
no solo
aerovia) em NM para o trecho i.
Adotamos os valores publicados nas cartas de navegação em altitude para vôos por
ser provido pelo sistema de planejamento de navegação produzido pelo
instrumentos.
e. Valores negativos de Vw significam componentes de vento de proa.
nificam componentes de ventos de cauda. Adicionalmente, é necessário o
de TAS deve
serem
provido
sistema
planejamento
de navegação
ara condições O
devalor
temperatura
média
rota pelo
diferente
do de
padrão.
A
pelo fabricante
daaraeronave.
definida produzido
como temperatura
estática do
na referidaValores
altitudenegativos
de acordode Vw significam
componentes
vento
de proa.
Valores positivos
componentes de ventos
mosfera padrão
definidodepela
OACI
(denominada
condiçãosignificam
ISA, ou seja,
de
cauda.
Adicionalmente,
é
necessário
o
ajuste
de
consumo
andard Atmosphere). Maiores detalhes podem ser verificados das para condições de
média em rota diferente do padrão. A temperatura padrão é definida
a (1996) etemperatura
BOEING (1998a).
como
temperatura
estática do
ar cada
na referida
altitude
acordo
Manual de Operações da Aeronave,
para
1ºC acima
do de
valor
da com o modelo de
atmosfera
definido
pela
(denominada
condição
escenta-se
0,4% nopadrão
consumo
horário
da OACI
aeronave.
Como o fator
f é ISA, ou seja, na
onal ao consumo total (que é a integração do consumo horário), então o
mbém ajustado para este desvio com razoável aproximação através da
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
97
International Standard Atmosphere). Maiores detalhes podem ser verificados das
referências em Padilla (1996) e BOEING (1998a).
De acordo com o Manual de Operações da Aeronave, para cada 1ºC acima
do valor da temperatura ISA, acrescenta-se 0,4% no consumo horário da aeronave.
Como o fator f é diretamente proporcional ao consumo total (que é a integração do
consumo horário), então o mesmo pode ser também ajustado para este desvio com
razoável aproximação através da seguinte equação:
f i*= fi. (1+0,004*DELTA_ISAi)
(20)
Onde fi* : Fator de ajuste de consumo de combustível em condições de
temperatura diferente da temperatura padrão (ISA) para o trecho i.
fi : Fator de ajuste de consumo de combustível em condições de
temperatura padrão
(ISA) para o trecho i.
DELTA_ISAi : Desvio da temperatura na altitude de cruzeiro em relação à
temperatura padrão (ISA) para o trecho i [ºC].
Resultados
Considerou-se que, no início da programação, a aeronave encontrava-se com
2.000 kg, geralmente determinada como a quantidade de combustível mínima a
bordo conforme a política operacional da empresa aérea. Na Tabela 3 encontram-se
todos os dados de entrada necessários para a resolução do problema.
Na Tabela 4, apresentam-se os resultados contendo a estratégia de
abastecimento convencional, onde se procura decolar na medida do possível com
o combustível mínimo regulamentar, e os valores de abastecimento obtidos a partir
da aplicação do modelo proposto.
Uma exceção é feita na etapa REC-MCZ onde o combustível mínimo
regulamentar foi inferior ao remanescente da etapa. Nesta tabela, verificam-se
também os valores abastecidos em cada base (Xi), bem como os custos associados a
cada abastecimento de acordo com os preços de combustível informados.
98
i
Transporte em Transformação XI
DE
PARA
Pi
D
[ US$
/ kg]
ALT
CRZ
ISA
Dev
CRZ
VENTO
CRZ
TAS
d
PZCi
f* PMDi
PMPi
MFOB0i
TRIP0i
[NM]
[ft]
[ºC]
[Kt]
[Kt]
[NM]
[kg]
[kg]
[kg]
[kg]
[kg]
1
FOR
REC
1,26
339
39000
4
-11
404
348
1,80%
35600
50300
43000
4870
1957
2
REC
MCZ
1,01
98
15000
17
-5
310
100
0,46%
35600
50300
43000
2639
1143
3
MCZ
AJU
1,16
116
20000
17
-9
330
119
0,57%
35600
50198
43000
2841
964
4
AJU
SSA
1,16
137
24000
16
-9
347
141
0,67%
35600
50300
43000
3093
1085
5
SSA
GRU
1,05
846
38000
6
-44
439
940
5,31%
35600
50300
43000
6818
4395
6
GRU
CWB
0,96
194
30000
12
-52
386
224
1,13%
35600
50300
43000
3707
1400
7
CWB
GRU
0,93
221
31000
12
5
377
218
1,07%
35600
46971
43000
3520
1382
8
GRU
SSA
0,96
787
39000
4
2
432
783
4,33%
35600
50300
43000
5941
3675
9
SSA
AJU
1,05
137
25000
16
-17
353
144
0,68%
35600
50300
43000
3093
1098
10
AJU
MCZ
1,16
116
19000
17
-10
325
120
0,58%
35600
50300
43000
2750
973
11
MCZ
REC
1,16
98
18000
17
-10
319
101
0,45%
35600
50198
43000
2633
867
12
REC
FOR
1,01
337
38000
6
-22
408
356
1,84%
35600
50300
43000
4875
1986
Tabela 3: Dados de entrada.
ESTRATÉGIA CONVENCIONAL
ESTRATÉGIA COM TANQUEAMENTO
i
DE
PARA
REMi
[kg]
[kg]
[kg]
[kg]
[kg]
[kg]
[US$]
[kg]
[kg]
[kg]
[kg]
[kg]
[kg]
[US$]
1
FOR
REC
2000
2870
4870
40470
1957
38513
3.604,53
2000
2870
4870
40470
1957
38513
3.604,53
2
REC
MCZ
2913
0
2639
38513
1143
37370
0
2913
5657
8570
44170
1170
43000
5.737,21
3
MCZ
AJU
1770
1071
2841
38441
964
37477
1.243,64
7400
0
7400
43000
990
42010
0
Xi
FOBi
Pdi
TRIPi
PPi
CUSTO
REMi
Xi
FOBi
Pdi
TRIPi
PPi
CUSTO
4
AJU
SSA
1877
1216
3093
38693
1085
37608
1.407,17
6410
0
6410
42010
1107
40903
0
5
SSA
GRU
2008
4810
6818
42418
4395
38023
5.042,84
5303
1515
6818
42418
4395
38023
1.588,56
6
GRU
CWB
2423
1284
3707
39307
1400
37907
1.227,57
2423
1284
3707
39307
1400
37907
1.227,57
GRU
2307
1213
3520
39120
1382
37738
1.124,01
2307
6532
8839
44439
1439
43000
6.052,70
7
8
GRU
SSA
2138
3803
5941
41541
3675
37866
3.635,86
7400
1355
8755
44355
3797
40558
1.295,40
9
SSA
AJU
2266
827
3093
38693
1098
37595
867,03
4958
0
4958
40558
1111
39447
0
10
AJU
MCZ
1995
755
2750
38350
973
37377
873,69
3847
0
3847
39447
979
38468
0
11
MCZ
REC
1777
856
2633
38233
867
37366
993,74
2868
0
2868
38468
868
37600
0
12
REC
FOR
1766
3109
4875
40475
1986
38489
3.152,93
2000
2875
4875
40475
1986
38489
2.915,62
21199
22.421,60
TOTAL
20925
23.173,01
Tabela 4: Estratégias de abastecimento
Na Tabela 5, encontra-se um comparativo final entre os dois métodos. As
estimativas mensais e anuais são projetadas para uma única aeronave efetuando
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
99
esta programação seis dias por semana. Na Figura 3, pode ser vista claramente a
estratégia de abastecimento. Os valores entre parênteses são os preços de combustível
nas localidades de origem.
ITEM
VALOR DIÁRIO
PROJEÇÃO MENSAL
PROJEÇÃO ANUAL
ECONOMIA [US$]
751,41 (3,24%)
19.322,08
231.865,00
1096 (1,31%)
28.191
ECONOMIA MÉDIA POR TRECHO [US$]
62,62
CONSUMO EXTRA [kg]
CONSUMO EXTRA POR TRECHO [kg]
338.294
23
Tabela 5: Resultados comparativos finais
Diferenças de Abastecimento
6000
5000
4000
CONVENCIONAL
3000
COM TANQUEAMENTO
2000
1000
/F
O
R
(1
,0
1)
6)
,1
6)
EC
R
M
C
Z/
R
Z
C
EC
(1
(1
,1
5)
)
,0
(1
U
AJ
U
/M
)
96
(0
,
AJ
SA
SS
A/
)
93
(0
,
R
U
/S
G
G
R
U
)
96
05
W
B/
C
U
/C
W
B
(1
,
(0
,
6)
G
G
R
A/
SS
/S
SA
R
U
(1
,1
,1
6)
1)
(1
JU
Z/
A
C
M
AJ
U
,2
(1
Z
C
/M
/R
EC
EC
R
FO
R
(1
6)
0
,0
Quantidade Abastecida - Xi (kg)
7000
Etapas
Figura 3: Diferença de quantidade de abastecimento (Xi) ao longo das rotas entre
a estratégia convencional e o tanqueamento de combustível.
7. Considerações Finais
Verificou-se que o modelo proposto está consistente com os resultados
encontrados por Stroup e Wollmer (1991), quando aplicam seu modelo sem
restrição de quantidade de combustível abastecida nos aeroportos. Todos os
100
Transporte em Transformação XI
resultados encontrados são válidos considerando-se as premissas adotadas pelo
modelo. Obteve-se um ganho de 3,24% para as doze etapas analisadas, o que é
considerado bastante satisfatório na indústria aeronáutica, onde reduções de custos
operacionais da ordem de 1% são usuais. Para o cenário analisado, uma frota de dez
aeronaves, voando seis vezes por semana, traria economias anuais estimadas em
US$ 2.318.650,00 caso tal procedimento fosse adotado.
Entretanto, deve-se ressaltar que o procedimento de tanqueamento de
combustível traz, além dos ganhos econômicos, um grande impacto ambiental. No
exemplo analisado, existe um consumo adicional médio de combustível de 23 kg
por etapa voada, ou 338 toneladas de consumo adicional anual por aeronave. Este
consumo adicional também implica na emissão de poluentes que serão liberados
nas camadas superiores da troposfera e tropopausa, onde as aeronaves comerciais a
jato geralmente voam. De acordo com estudos recentes do FAA (2004), para cada
1.000 kg de combustível JET-A1 queimado, a combinação aeronave/motor em
questão gera como produto de sua combustão as seguintes quantidades de gases na
atmosfera é mostrada na Tabela 6:
Elemento
NOX
CO
HC
CO2
H20
SOX
Emissão [kg]
23,957
3,547
0,312
3155,933
1311,297
0,799
Tabela 6 - Emissão de poluentes para cada 1000 kg de combustível consumido
Ou seja, apenas considerando o CO2, tal operação implicaria a emissão de
1067 toneladas adicionais anuais na atmosfera, apenas considerando-se uma única
aeronave. Nos tempos atuais, discute-se fortemente a influência do aquecimento
global como conseqüência da emissão de gases provenientes da atividade industrial
humana. Análises da contribuição da atividade aérea no efeito estufa estão cada vez
mais apuradas, estimando-se que a mesma participe atualmente em aproximadamente
2,5 % nas emissões totais de CO2 ou 12% das emissões efetuadas pelos meios de
transporte que utilizam combustíveis fósseis.
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
101
De acordo com a ICAO (2006), começa-se a estudar a possibilidade da adoção
de taxas de pouso e permanência baseadas em níveis de emissões das aeronaves,
assim como hoje é aplicado ao ruído aeroportuário em alguns lugares do mundo.
Os aeroportos internacionais em Zurique e Estocolmo foram os primeiros a ensaiar
tais medidas. Nos próximos anos, é previsto que o Anexo XVI da OACI já contenha
recomendações para a determinação de tais tarifas e classificação de grupos de
aeronaves poluentes. Empresas aéreas que operarem aeronaves com altos níveis
de emissão pagarão mais por seu prejuízo ecológico. Portanto, um objetivo para
investigação futura é a avaliação do procedimento de tanqueamento de combustível
à luz dos impactos causados por esta técnica ao meio ambiente.
102
Transporte em Transformação XI
Referências Bibliográficas
ABDELGHANY, K.; ABDELGHANY, A.; RAINA, S. (2004). A model for the
airlines’ fuel management strategies. Journal of Air Transport Management 11
(2005) 199-206.
BOEING COMPANY. Fuel Conservation News Letters. Seattle ,1992.
BOEING COMPANY. Wind and Temperature Route Statistical Information. Seattle, 1992.
BOEING COMPANY. Jet Transport Performance Methods. Seattle, 1998.
COMANDO DA AERONÁUTICA. Regulamento Brasileiro de Homologação Aeronáutica (RBHA) 121 – REQUISITOS OPERACIONAIS: OPERAÇÕES DOMÉSTICAS, DE BANDEIRA E SUPLEMENTARES. Rio de Janeiro, 2003.
CORDINA, E. A study on ways to limit the environmental harm caused by engine
emissions and an assessment of the future environmentally friendly aircraft technologies . London City University. Londres, 2002.
DARNELL, D.W.; LOFLIN, C. (1977). National Airlines Fuel Management and
Allocation Model. Interfaces. Vol. 7, pp. 1-16, 1977.
EMBRAER. Embraer 170/190 Fuel Conservation. São José dos Campos, 2005.
EMBRAER. Embraer 170/190 Flight Operations Engineering Course Notes. São
José dos Campos, 2006.
EMBRAER. Embraer 190 Operations Manual Vol.1. Chapter 6 – Flight Planning.
São José dos Campos, 2006.
FAA. SAGE - APPENDIX “D” MODAL AIRCRAFT FUEL BURN AND EMISSIONS FOR 2004. Seattle, 2004.
INTERNATIONAL AIR TRANSPORT ASSOCIATION (IATA). Guidance Material and Best Practices for Fuel and Environmental Management .1st Edition
Effective.Montreal, 2004.
Um Modelo para a Minimização dos Custos Totais de Abastecimento Considerando as
Múltiplas Escalas das Aeronaves nas Rotas de uma Empresa Aérea Doméstica Brasileira
103
INTERNATIONAL CIVIL AVIATION ORGANIZATION (ICAO). Annex 16 “International standards and recommended practices, Environmental protection”,
Volume II “Aircraft engine emissions”, 2nd
Edition. Montreal, 1993.
INTERNATIONAL CIVIL AVIATION ORGANIZATION (ICAO). CAEP/7 Issue Paper No.7:
Cost Effectiveness on Local Air Quality Charges. Montreal, 2006.
MINISTÉRIO DAS MINAS E ENERGIA. A tributação dos combustíveis no Brasil. Departamento
de Combustíveis e Derivados do Petróleo, Gás Natural e Combustíveis Renováveis. Brasília,
2006.
PADILLA, C.E. Optimizing Jet Transport Eficiency – Performance,Operations and Economics.
McGraw-Hill, New York,1996.
SABOYA, E.W..Airline Flight Operations Handbook..VARIG.Porto Alegre, 1992.
STROUP, J. W.; LACKEY, W. J. (1975). Fuel management model( for aircraft fuel costs and requirements). Operations Research Society of America and Institute of Management Sciences, Joint
National Meeting, Las Vegas, Nevada (USA), 1975.
STROUP, J.S. & WOLLMER, R.D. (1991). A Fuel Management Model for the Airline Industry.
Operations Research, Vol. 40, No. 2, pp. 229-237.
ZOUEIN, P.P., ABILLAMA, W.R. & TOHME, E. (2002). A multiple period capacitated inventory
model for airline fuel management: a case study. Lebanese American University. Beirute, Líbano.
Anexo I: Gráfico de Planejamento de Rota Simplificado em Long Range Cruise
para consumo de combustível.
104
Transporte em Transformação XI
Anexo I: Gráfico de Planejamento de Rota Simplificado em Long Range Cruise
para consumo de combustível.
ISA CONDITION
13000
EMBRAER
190 SIMPLIFIED
FLIGHT
PLANNING
SIMPLIFIED
FLIGHT
PLANNING
TRIP FUEL
TRIP
FUEL
ALL ENGINE TYPES
LONG
CRUISE
LONGRANGE
RANGE CRUISE
12500
12000
FL150 FL200 FL250 FL300
BASED ON:
250/290/M0.75 CLIMB
M0.77/290/250 DESCENT
11500
11000
10500
FL350
10000
FUEL REQUIRED - kg
9500
9000
8500
8000
7500
FL370
7000
6500
6000
5500
5000
4500
4000
3500
3000
2500
2000
1500
LANDING WEIGHT - kg
1000
500
0
-500
44000
-1000
42000
-1500
40000
REF.
LINE
-2000
38000
36000
-2500
-3000
34000
-3500
-4000
60
WIND - kt
TAIL
HEAD
-4500
-5000
30
-5500
-60000
REF.
LINE
-6500
30
-7000
-7500
-8000
60
-8500
-9000
0
200
400
190AOM001 - 07OCT2005
600
800
1000
1200
1400
1600
1800
TRIP DISTANCE - NM
2000
2200
2400
2600
2800
Controle de Retenção para
Sistemas de Transporte
Público
5
Luiz Alberto Koehler
Universidade Regional de Blumenau
Depto. de Eng. Elétrida e de Telecomunicações
Werner Kraus Jr.
Eduardo Camponogara
Universidade Federal de Santa Catarina
Depto. de Automação e Sistemas
Resumo
Este trabalho apresenta uma estratégia de controle de retenção para um sistema
de transporte urbano tipo expresso ou BRT. O modelo utilizado é determinístico e
pressupõe informações em tempo real e dados históricos do sistema. A partir destes
dados calcula-se o tempo de retenção ótimo de cada ônibus para os pontos dentro do
horizonte considerado. O objetivo é a minimização do atraso total dos passageiros,
representado por uma função custo quadrática com uma parcela linear. O modelo
utilizado e a heurística adotada na instanciação do problema de otimização
apresentam várias vantagens em relação a outros trabalhos da literatura, tais como
a complexidade computacional reduzida e a convexidade da função custo. Um
exemplo numérico ilustra a aplicação do método.
106
Transporte em Transformação XI
Abstract
A holding strategy for the control of a BRT urban transportation system is
presented. The model developed is deterministic and assumes availability of realtime information and historical data of the system. From these data the optimal
holding time for each vehicle in different stops is evaluated for a given time
horizon. The objective is to minimize total passenger delay which is represented
by a quadratic cost function combined with a linear term. Both the model and the
heuristic used in the instantiation of the optimization problem present advantages
when compared to other approaches in the literature such as reduced computational
complexity and convexity of the cost function. A numerical example illustrates the
application of the method.
1. Introdução
O sistema de transporte público representa, atualmente, um serviço vital, com
grande número de usuários e considerável significado social. Este serviço permite
uma redução significativa dos congestionamentos de veículos além de outros
benefícios associados, tornando-se essencial para a preservação e revitalização das
áreas urbanas. No caso do modal ônibus, podem-se citar ainda as características de
alta flexibilidade e baixo custo de implantação e manutenção quando comparado
com o transporte sobre trilhos.
Na prática verifica-se com freqüência uma operação inadequada do serviço
de transporte público, caracterizada através do agrupamento dos VTP (veículos de
transporte público) e desvios no plano de horários e intervalo entre VTP. Estes
fatores implicam num aumento do tempo de espera e viagem dos passageiros.
Uma solução para os problemas citados é a utilização de uma política baseada em
estratégias de controle da operação do sistema de transporte público.
Enquanto o planejamento operacional é responsável por solucionar problemas
de natureza persistente e contínua através da reestruturação de rotas e planos de
horário, a operação tempo real têm por objetivo responder de forma imediata a
possíveis e esporádicas perturbações no serviço, de forma a otimizar o desempenho
do sistema (Turnquist e Blume, 1980). Desvios no serviço impõem custos aos
Controle de Retenção para Sistemas de Transporte Público
107
prestadores do serviço na forma de queda de produtividade e aos usuários na
forma de aumento do tempo de viagem, aumento no tempo de espera nos pontos e
incertezas nos horários.
Neste trabalho propõe-se uma estratégia de controle tempo real do intervalo
ou espaçamento (“headway”) entre VTP para um sistema de transporte tipo expresso
ou BRT (“Bus Rapid Transit”). O objetivo é a minimização do atraso dos usuários do
sistema. Como diferencial em relação a trabalhos anteriores (Eberlein et al., 1999;
O’ Dell e Wilson, 1999; Eberlein et al., 2001; Sun e Hickman, 2004; Zolfaghari et
al., 2004), este trabalho apresenta várias particularidades em relação ao modelo
utilizado e à heurística adotada para solução do problema.
2. Operação em Tempo Real do Sistema de Transporte
Público
As principais estratégias de controle em tempo real aplicadas a sistemas de
transporte urbano são: retenção ou “holding”; salto de pontos ou “stop skipping”;
retorno antecipado ou “short-turning”; sempre avante ou “dead-heading”; expresso
e VTP extra.
Na prática, a utilização de estratégias do tipo salto de ponto, sempre avante
e retorno antecipado não são bem vistas pelas agências de trânsito, isto em virtude
da reação negativa dos passageiros em relação ao salto de pontos e necessidade
de desembarque “forçado” do VTP (Strathman et al., 2001). Para um serviço
normal sujeito a pequenos desvios e pequenas perturbações no plano de horários
ou espaçamento entre VTP, as estratégias mais empregadas são a prioridade para
VTP nas sinalizações e retenção nos pontos (Zolfaghari et al., 2004; Koehler e
Kraus, 2006a; Koehler e Kraus, 2006b). Este trabalho está focado na estratégia de
retenção, descrita a seguir.
2.1. Estratégia de Controle Tipo Retenção
A necessidade de controlar o movimento dos VTP ao longo das rotas e
pontos deve-se a instabilidade natural do intervalo ou espaçamento entre estes.
Esta instabilidade é causada por variações probabilísticas no tempo de embarque/
108
Transporte em Transformação XI
desembarque dos passageiros nos pontos (devido a variações no número de
passageiros) e ou velocidades ao longo da rota (devido a variações no volume
de tráfego) (Lin et al., 1995). Esta instabilidade faz com que os VTP acabem se
agrupando e formando pelotões (efeito “bunching”).
A estratégia de controle tipo retenção consiste em reter o VTP por determinado
tempo nos pontos, buscando com isso reduzir a variação no espaçamento (ou intervalo)
entre estes. Osuna e Newell (apud Bukkapatnam et al., 2003) concluíram que o tempo
de espera dos passageiros nos pontos diminui com o aumento da regularidade do
espaçamento e que o valor é mínimo para variação zero em relação ao espaçamento
nominal. Estas duas conclusões são a base para as estratégias de retenção.
O controle do espaçamento via retenção dos VTP nos pontos é mais indicado para
rotas operando com espaçamentos pequenos e uniformes. Neste caso os passageiros
não estão preocupados com o horário de chegada dos VTP aos pontos. (Abkowitz e
Engelstein, 1984; Lin et al., 1995). Esta característica implica na utilização de um
modelo de chegada dos passageiros nos pontos representado por uma taxa constante.
2.2. Classificação das Estratégias de Controle Tipo Retenção
As estratégias de retenção podem ser classificadas em dois grupos (Zolfaghari
et al., 2004):
• controle baseado no valor limite: manutenção de um espaçamento entre VTP
constante, onde o VTP, após o embarque e desembarque de passageiros, é
retido no ponto se o espaçamento está abaixo do tempo especificado. Neste
caso o VTP é retido até o espaçamento ser restaurado e então despachado.
Se após o embarque e desembarque de passageiros o espaçamento está
acima do tempo especificado o VTP é despachado imediatamente;
• modelo de programação matemática: utiliza como variável de decisão
o tempo de retenção dos VTP nos ponto e, como função custo a
ser minimizada, o tempo de atraso dos passageiros. Estes modelos
geralmente incluem dados da operação do transporte público como tempo
de parada dos VTP nos pontos, processos de embarque e desembarque
dos passageiros, limiares de espaçamento e restrições de capacidade
(Desaulniers e Hickman, 2003).
Controle de Retenção para Sistemas de Transporte Público
109
Conforme citado por Eberlein et al. (2001), vários estudos anteriores a partir
de 1972 abordaram a estratégia de retenção baseada no valor limite. A maioria
destes não considera informações em tempo real, ignora os efeitos do tempo de
embarque/desembarque de passageiros na variação do espaçamento entre VTP e
desconsidera várias restrições relacionadas ao tempo de partida e ultrapassagem dos
VTP. Devido à complexidade do problema de retenção, somente modelos analíticos
bastante simplificados foram utilizados. De forma geral, os resultados apresentados
concluem que estes modelos utilizados para controle da retenção não são muito
eficientes.
Nos sistemas de controle de tráfego e de transporte público modernos, com
a utilização de tecnologias do tipo “AVL” (localização automática de veículos),
“AVI” (identificação automática de veículos), “APC” (contagem automática de
passageiros) e outras, uma abordagem em tempo-real se faz possível e desejável.
O primeiro trabalho neste sentido foi apresentado por Eberlein et al. (1999),
podendo-se citar ainda os trabalhos de O’ Dell e Wilson (1999), Eberlein et al.
(2001), Sun e Hickman (2004) e Zolfaghari et al. (2004), dentre outros.
No trabalho apresentado por Eberlein et al. (2001), as informações são
baseadas em dados tempo-real, como o instante de partida de cada VTP do último
ponto visitado e dados históricos como taxa de chegada de passageiros nos pontos,
tempo de viagem entre pontos, percentual de passageiros que desembarcam em cada
ponto, etc. O modelo, baseado nas características de um sistema de transporte sobre
trilhos, é completamente determinístico e inclui o efeito do tempo de embarque/
desembarque de passageiros e um modelo analítico para descrever o movimento
dos VTP. O controle de retenção só é exercido num ponto, escolhido dentro do
conjunto de pontos da rota, para um conjunto de veículos dentro de um horizonte
(rolante) considerado. Considera-se ainda um conjunto de pontos de impacto, que
vai do ponto de controle até o próximo ponto ou terminal com controle do plano
de horários. A variável de decisão é o instante de partida dos VTP, pertencentes ao
horizonte, no ponto de controle. Como pode ser constatado, existe uma limitação
no número de veículos considerados (horizonte) e um único ponto de controle. O
modelo não considera o atraso dos passageiros embarcados nos VTP e apresenta
limitações na descrição do tempo de embarque/desembarque de passageiros.
O trabalho apresentado por Zolfaghari et al. (2004), incorpora ainda alguns
aspectos específicos do sistema de transporte de ônibus urbano, como por exemplo,
110
Transporte em Transformação XI
a capacidade dos VTP. As informações também são baseadas em dados tempo-real
e dados históricos do sistema. O tempo de retenção, para cada intervalo de controle,
é calculado para todos os VTP no primeiro ponto de embarque/desembarque
encontrado. Considera-se também um conjunto de pontos de impacto, seguintes
ao ponto de controle. O modelo utiliza variáveis do tipo inteira para o instante de
partida dos VTP dos pontos, o que leva facilmente a uma explosão combinatória,
inviabilizando uma solução em tempo real. O exemplo apresentado pelos autores
não traduz esta possibilidade, limitando-se a solução de um problema bastante
simples e restrito.
Neste contexto, este trabalho propõe um modelo de estratégia de controle
tipo retenção, para um sistema de transporte urbano tipo expresso ou “BRT”. A
utilização de um sistema BRT se justifica pela facilidade de estimativa do tempo de
viagem dos VTP entre pontos. Nada impede a utilização do modelo num sistema
de transporte público que não BRT, bastando para isso, dadas as particularidades e
características de cada cenário, as estimativas atualizadas do tempo de viagem dos
VTP entre pontos.
O modelo aqui proposto apresenta soluções para várias limitações de modelos
anteriores, conforme descrito a seguir.
3. Modelo de um Sistema de Controle de Retenção para Brt
O modelo aqui utilizado considera um sistema de transporte urbano tipo
BRT com canaleta exclusiva para os VTP, sistema este adotado em várias cidades
brasileiras. Considera-se ainda, conforme indicado na Figura 1, uma rota fechada
com uma pista de mão única, com vários VTP operando ao longo de vários
pontos.
Controle de Retenção para Sistemas de Transporte Público
111
Figura 1: Esquema do modelo BRT utilizado
Assume-se a disponibilidade das seguintes informações através de sistemas
“AVL” e “APC”:
• o instante de partida de cada VTP do último ponto visitado;
• índice do último ponto visitado;
• número de passageiros embarcados na saída do último ponto visitado.
Consideram-se ainda os seguintes dados históricos:
• taxa de chegada dos passageiros nos pontos;
• percentual de passageiros embarcados que desembarcam nos pontos;
• parâmetros/constantes de embarque e desembarque de passageiros nos
pontos;
• tempo de viagem dos VTP entre pontos.
O modelo é sujeito as seguintes aproximações e limitações:
• a capacidade dos VTP não é considerada (não existe resíduo de fila de
passageiros nos pontos);
• o tempo de viagem dos VTP entre pontos é aproximado pelo valor
esperado, incluindo o possível atraso provocado por semáforos;
112
Transporte em Transformação XI
• o tempo de embarque e desembarque é aproximado por uma função linear;
• o impacto do controle do instante de partida de cada VTP dos pontos é
considerado para um horizonte limitado de pontos a jusante;
• o número de passageiros embarcados é representado por uma variável
contínua;
• utilizaçãodeestimativasparadeterminaçãodonúmerodepassageirosembarcados
e do maior tempo (“dwell time”) entre embarque ou desembarque.
3.1. Modelo Matemático
No modelo proposto a função objetivo considera o tempo de espera dos
passageiros nos pontos, ao longo da rota, mais o tempo de espera dos passageiros
embarcados. Consideram-se todos os VTP do sistema e um horizonte de pontos
a jusante para cada um destes. O tempo de espera dos passageiros embarcados é
definido como o tempo que o VTP fica retido no ponto (retenção) além do tempo de
embarque e desembarque dos passageiros (“dwell time”). O tempo total de atraso
de passageiros, nos pontos e embarcados é dado por:
ni
f =∑
li +N i
∑G
i
i =1 k =l +1
l
p
k
2
(d
i ,k
− d i −1,k ) + Ge (1 − q k )liest
, k −1 hi , k 2
(1)
onde i: índice dos VTP, i=1,...,ni;
k: índice dos pontos, k=1,...,nk;
li: vetor contendo o último ponto de parada dos VTP i;
Ni: horizonte do número de pontos a jusante a serem considerados no cálculo dos atrasos;
Gp: peso dos passageiros nos pontos;
Ge: peso dos passageiros embarcados nos VTP;
λk: taxa de chegada de passageiros no ponto k [passag./s];
di,k: instante de partida do VTP i do ponto k [s];
qk: percentual de passageiros embarcados que desembarcam no ponto k;
li,kest: estimativa do número de passageiros embarcados no VTP i quando parte do ponto k;
hi,k: tempo de retenção do VTP i no ponto k [s];
A primeira parcela da Equação 1 representa o atraso dos passageiros nos
pontos e a segunda parcela o atraso dos passageiros embarcados nos VTP.
Controle de Retenção para Sistemas de Transporte Público
113
A questão a ser respondida consiste em determinar quanto, em quais pontos e
quais VTP devem ser retidos para se minimizar a função custo apresentada, ou seja,
minimizar o atraso total dos passageiros.
As restrições associadas ao modelo são discutidas a seguir. Inicialmente, o
instante de chegada do VTP i ao ponto k é dado por:
a i ,k = d i ,k −1 + rk (2)
com ai,k sendo o instante de chegada do VTP i no ponto k [s], rk o tempo de
viagem entre os pontos k-1 e k [s] e di,k conforme definido anteriormente. O modelo
utilizado para descrever o tempo de embarque de passageiros e o instante de partida
do VTP do ponto está indicado no gráfico da Figura 2.
Figura 2: Gráfico do modelo de embarque de passageiros
e do instante de partida do VTP
O tempo de embarque representa o tempo a partir da chegada do VTP no
ponto k até a extinção da fila de passageiros:
siemb
,k =
C 0 + C1l
k
(a
i ,k
− d i −1,k )
(1 − C1l k )
(3)
114
Transporte em Transformação XI
onde C0 e C1 (tempo de embarque por passageiro) são constantes do modelo.
O tempo de desembarque é dado por:
sides
, k = C 0 + C 2 q k l i , k −1 (4)
com C2 (tempo de desembarque por passageiro) constante e o número de
passageiros que desembarcam no ponto k sendo um percentual dos passageiros
embarcados. Apesar dos tempos de embarque e desembarque reais não serem uma
função linear, vários estudos mostram que para um serviço com espaçamentos
pequenos entre VTP, estes podem ser aproximados por uma função linear (Wilson
e Lin, 1992). A restrição de escolha do maior dentre os tempos é:
(
)
des
si ,k = max siemb
,k , si ,k (5)
que implica numa restrição não linear. O instante de partida do VTP i do
ponto k é dado por:
d i ,k = ai ,k + si ,k + hi ,k (6)
onde hi,k é o valor de retenção que se deseja otimizar. Para garantir um intervalo
mínimo entre dois VTPs sucessivos, define-se:
d i ,k ≤ d i +1,k −1 + rk − emin (7)
isto é, o instante de partida do VTP i do ponto k pode ser no máximo igual ao
instante de chegada do VTP i+1 ao ponto k menos o intervalo mínimo emin permitido
[s]. A retenção também é limitada a um valor máximo,
hi ,k ≤ hmax (8)
para evitar-se esperas muito longas nos pontos. O número de passageiros
transportados pelo VTP i ao partir do ponto k é dado por:
li ,k = l
k
(d
i ,k
− d i −1,k )+ (1 − q k )li ,k −1 (9)
Controle de Retenção para Sistemas de Transporte Público
115
Por fim, define-se a natureza não-negativa das variáveis:
ai ,k , d i ,k , si ,k , hi ,k , li ,k ≥ 0 (10)
Como se depreende, com exceção da Equação 5, as demais restrições
apresentadas são lineares.
3.2. Características do Modelo e da Solução Proposta
Para um modelo realista e uma solução ou otimização eficiente, em tempo
real, foram feitas as seguintes considerações:
i) Utilização de um modelo determinístico: apesar do problema de controle
de retenção em tempo real ter uma natureza eminentemente estocástica, este pode
ser analisado como um caso limite onde a variância dos elementos estocásticos
envolvidos, durante o intervalo de decisão de controle, é muito pequena e, portanto,
aproximado por um modelo determinístico (Eberlein et al., 2001).
ii) Formulação do custo como uma função convexa: a utilização de uma
função objetivo convexa implica num mínimo global, ou seja, numa solução ótima
única. Entretanto, a inserção na função objetivo da parcela que representa o atraso
dos passageiros embarcados nos VTP, implica numa não convexidade em função
da dependência de li,k em relação aos valores calculados para di,k (ou hi,k). Para
contornar este problema, utiliza-se uma estimativa dos passageiros embarcados nos
VTP (li,kest), calculada considerando-se uma retenção igual a zero nos pontos dentro
do horizonte e portanto, não dependente de hi,k.
iii) Utilização de restrições lineares: a não linearidade imposta pela Equação
5 na escolha entre o tempo de embarque ou desembarque é contornada através de
uma estimativa de si,kemb e si,kdes para cada ponto k antes de resolver o problema de
otimização. Tal estimativa considera uma retenção igual a zero nos pontos dentro
do horizonte. Através da estimativa, determina-se o maior dos dois valores e, então,
resolve-se uma instância particular do modelo que considera, para cada ponto k,
somente a restrição que corresponde ao maior dos dois tempos. Deste modo, evitase a não linearidade imposta pela Equação 5.
116
Transporte em Transformação XI
iv) Representação do modelo através de variáveis contínuas: a representação
de ai,k , di,k , si,k , hi,k e li,k na forma de variáveis contínuas permite a utilização de
técnicas de otimização de complexidade polinomial, evitando-se assim uma
explosão combinatória. A possibilidade de representação do número de passageiros
embarcados por um número não inteiro tem impacto insignificante face às
aproximações utilizadas no modelo.
v) Utilização de restrição de agrupamento (“bunching”) ou ultrapassagem
(“overtaking”): um modelo que busque representar um sistema real deve considerar
o problema de agrupamento e ultrapassagem de VTP. No modelo aqui utilizado tal
problema é evitado através da utilização da Equação 7. Tal restrição não aparece,
por exemplo, no trabalho de Zolfaghari et al. (2004).
vi) Possibilidade de retenção em todos os pontos do horizonte Ni: nos
trabalhos apresentados por Eberlein et al. (2001), Zolfaghari et al. (2004) e outros,
o controle de retenção só é possível num único ponto dentre os pontos da rota ou
no primeiro ponto dentro do horizonte de pontos de cada VTP, respectivamente.
Tal fato implica numa ação de retenção concentrada neste(s) ponto(s) e portanto,
num possível tempo de retenção excessivo sob o ponto de vista dos passageiros
embarcados. Outro aspecto a ser considerado é a limitação do valor máximo de
retenção indicado na Equação 8. Caso a retenção seja limitada por hmax, a diferença
não pode ser compensada nos pontos seguintes dentro do horizonte se apenas um
ponto de controle é utilizado. Com a possibilidade de retenção em todos os pontos
do horizonte, estes possíveis problemas são minimizados.
Em suma, quando comparados com outros métodos na literatura, o presente
modelo e a técnica de solução têm as seguintes vantagens: acréscimo da parcela do
atraso dos passageiros embarcados na função custo mantendo-se a convexidade,
conforme discutido no item ii acima; eliminação da restrição não-linear de escolha
entre si,kemb ou si,kdes através do procedimneto descrito no item iii; na utilização de
variáveis contínuas em oposição as variáveis discretas adotadas por Zolfaghari et al.
(2004); restrição de ultrapassagem, ausente em Zolfaghari et al. (2004); e cálculo
do controle ótimo com retenção em todos os pontos do horizonte considerado.
As simplificações, aproximações e características resultantes da heurística
utilizada permitem uma solução eficiente face à complexidade do modelo proposto,
mantendo-se ainda o aspecto realista deste.
Controle de Retenção para Sistemas de Transporte Público
117
4. Estudo de Caso
O cenário utilizado para testar a estratégia aqui proposta, via simulação
MatLab, é baseado no modelo apresentado na Figura 1 e constituído de um sistema
BRT em rota fechada, com 3 VTP e 3 pontos. A utilização de um cenário reduzido
visa tornar mais clara a análise e o entendimento da dinâmica envolvida.
Como citado, deve-se conhecer o instante de partida di,k de todos os VTP
i do último ponto k visitado, o número de passageiros li,k embarcados, os dados
históricos ou esperados do tempo de viagem rk entre pontos, taxa de chegada λk de
passageiros nos pontos, percentual de passageiros embarcados qk que desembarcam
em cada ponto, horizonte de pontos Ni considerado, retenção máxima hmax permitida
e outros. Os valores utilizados no exemplo aqui descrito são: d1,3 = 70 [s], d2,1 =
50 [s] , d3,1 = 20 [s] , l1,3 = 0, l2,1 = 0, l3,1 = 0, rk = [60 60 60], qk = [0,2 0,2 0,2], λk
= [0,05 0,05 0,05], Ni = 3, hmax = infinito, emin = 0, Gp = 1 e Ge = 1. A simulação
abrange duas voltas no circuito fechado proposto, com um tempo de percurso de
aproximadamente 8 minutos. Ao final da simulação é calculado o atraso total dos
passageiros, nos pontos e embarcados, para o período considerado. Vale relembrar
que, conforme indicado na Equação 1, a função custo considera o atraso dos
passageiros nos pontos e embarcados nos VTP. Portanto, uma possível retenção de
um VTP em determinado ponto, que a princípio reduziria o atraso dos passageiros
nos pontos, pode vir a aumentar o atraso dos passageiros embarcados. Ou seja, o
modelo utilizado considera ambos os atrasos no cálculo da solução ótima.
São simulados dois casos, com e sem o controle de retenção. As trajetórias
dos VTP com e sem controle de retenção são apresentadas nas Figuras 3 e 4
respectivamente. Aparece nos gráficos a trajetória do BRT ou VTP “0”, que
representa o BRT anterior ao BRT 1. Tal trajetória está presente a fim de se observar
o intervalo ou espaçamento entre o BRT 1 e o BRT anterior. Com a presença do
controle, o VTP 3 é retido no ponto k = 2, primeira volta, percurso de 1000 [m],
durante 22,6 [s]. A retenção, como pode ser verificado, implica numa alteração da
trajetória do VTP 3. Para o exemplo apresentado as retenções ótimas calculadas
são: h3,2 = 22,6 [s] (volta 1), com o restante das retenções iguais a zero.
118
Transporte em Transformação XI
Figura 3: Trajetórias dos BRT (ou VTP) com o controle de retenção
Figura 4: Trajetórias dos BRT (ou VTP) sem o controle de retenção
Controle de Retenção para Sistemas de Transporte Público
119
A Tabela 1 apresenta o atraso total dos passageiros, no período considerado,
para os dois casos, com e sem controle de retenção. Como pode ser observado, o
controle de retenção permitiu uma redução de 277,86 [s] ou 9,3% no atraso total
dos passageiros.
Tabela 1: Comparativo do atraso total dos passageiros com e sem controle de retenção
Controle de Retenção
Sim
Não
Atraso total dos passageiros [s]
2710.61
2988.47
5. Conclusões
Este trabalho apresenta um modelo de controle de retenção para um sistema
de transporte urbano tipo BRT. O modelo utilizado é completamente determinístico e
pressupõe informações em tempo real e dados históricos do sistema. A partir destes dados
calcula-se o tempo de retenção ótimo de cada VTP para os pontos dentro do horizonte
considerado. O objetivo é a minimização do atraso total dos passageiros, nos pontos e
embarcados, representado por uma função custo quadrática mais uma parcela linear.
O modelo utilizado e a heurística adotada para solução do problema
apresentam várias particularidades e vantagens em relação a outros trabalhos
anteriormente apresentados. Pode-se citar como diferencial a inclusão do atraso dos
passageiros embarcados na função custo, mantendo-se a convexidade; a utilização
de estimativas para escolha entre si,kemb ou si,kdes, evitando-se a não linearidade; a
utilização de variáveis contínuas, evitando-se a explosão combinatória; utilização
de restrição de ultrapassagem e possibilidade de retenção para todos os VTP em
todos os pontos do horizonte considerado.
As simplificações, aproximações e características resultantes da heurística
utilizada permitem uma solução eficiente face à complexidade do modelo proposto,
mantendo-se ainda o aspecto realista deste. O modelo é testado, via simulação, num
cenário reduzido, visando tornar mais clara a análise e o entendimento da dinâmica
envolvida. Os resultados apresentados mostram a eficiência do modelo de controle
de retenção para o exemplo proposto.
120
Transporte em Transformação XI
A utilização do modelo de controle de retenção aqui apresentado num
cenário maior e ou real é perfeitamente viável e possível. Espera-se para estes
casos resultados similares ou tão positivos quanto os obtidos no exemplo aqui
apresentado. Num cenário maior recomenda-se a utilização de um algoritmo de
otimização mais eficiente do que o aqui utilizado, o que não representa maiores
problemas. A especificação do peso dos passageiros nos pontos e embarcados, Gp e
Ge respectivamente, na função custo, fica a cargo do operador do sistema, devendo
refletir os objetivos desejados.
Sugere-se para trabalhos futuros o teste do modelo aqui apresentado num
sistema BRT real, com controle em tempo real do instante de partida (ou retenção)
dos VTP. De forma similar a simulação aqui apresentada, seriam necessárias as
informações em tempo real do instante de partida de cada VTP do último ponto
visitado e do número de passageiros embarcados e, dados históricos ou esperados
do tempo de viagem entre pontos, taxa de chegada de passageiros nos pontos e
percentual de passageiros embarcados que desembarcam em cada ponto, além de
alguns parâmetros constantes.
Conforme já citado, nada impede a utilização do modelo aqui apresentado
num sistema de transporte público que não BRT, bastando para isso, dadas as
particularidades e características de cada cenário, as estimativas atualizadas do
tempo de viagem dos VTP entre pontos. Uma próxima etapa deste trabalho prevê a
inclusão de semáforos no modelo com possibilidade de prioridade para BRT, o que
implica em restrições adicionais para di,k e ou nova formulação para rk.
Controle de Retenção para Sistemas de Transporte Público
121
Referências bibliográficas
Abkowitz, M. e I. Engelstein (1984) Methods for Maintaining Transit Service Regularity. Transportation Research Record 961, p. 1-8.
Bukkapatnam, S.; M. Dessouky e J. Zhao (2003) Distributed Architecture for RealTime Coordination in Transit Networks. Final Report, Metrans Project 00-13.
Desaulniers, G. e Hickman, M. D. (2003) Public Transit. Les Cahiers du GERAD,
G–2003–77.
Eberlein, X. J.; N. H. M. Wilson e D. Bernstein (1999) Modeling Real-Time Control Strategies in Public Transit Operations. Wilson, N.H.M. (Ed.), Lecture Note
in Economics and Mathematical Systems, No. 471: Computer Aided Transit
Scheduling. Springer-Verlag, Berlin, Heidelberg, p. 325–346.
Eberlein, X. J.; N. Wilson e D. Bernstein (2001) The Holding Problem with RealTime Information Available. Transportation Science, v. 35, n. 1, p. 1-18.
Koehler, L. A. e W. Kraus Jr. (2006a) A Controlled Departure Method for Bus Priority Operation. 11th IFAC (International Federation of Automatic Control) Symposium on Control in Transportation Systems, v. 1 p. 7-13.
Koehler, L. A. e W. Kraus Jr. (2006b) Sistema de Prioridade para Ônibus com Controle da Partida do Ponto. XX Congresso de Pesquisa e Ensino em Transportes,
Brasília. Panorama Nacional da Pesquisa em Transportes 2006, Rio de Janeiro,
ANPET, 2006, v. II p. 162-173.
Lin, G. S.; P. Liang; P. Schonfeld et al. (1995) Adaptive Control of Transit Operations. Report No. MD-26-7002. U.S. Department of Transportation, Federal
Transit Administration. 15 de novembro 1995.
O’ Dell, S. W. e N. H. M. Wilson (1999) Optimal Real-Time Control Strategies for
Rail Transit Operations During Disruptions. Wilson, N.H.M. (Ed.), Lecture Notes in Economics and Mathematical Systems, No. 471: Computer-aided Scheduling. Springer-Verlag, p. 299-323.
Strathman, J. G.; T. J. Kimpel; K. J. Duecker; et al. (2001) Bus Transit Operation
Control: Review and an Experiment Involving TriMet’s Automated Bus Dispatching System. Journal of Public Transportation, v. 4, n. 1, p. 1-26.
Sun, A. e M. Hickman (2004) The Holding Problem at Multiple Holding Stations.
9th International Conference on Computer-Aided Scheduling of Public Transport, agosto de 2004.
Turnquist, M. A. e S. W. Blume (1980) Evaluating Potential Effectiveness of Headway Control Strategies for Transit Systems. Transportation Research Record,
n. 746, p. 25-29.
122
Transporte em Transformação XI
Wilson, N. H. M. e T. Lin (1992) Dwell Time Relationships for Light Rail Systems.
Transportation Research Record, n. 1361, p. 287–295.
Zolfghari, S.; N. Azizi e M. Y. Jaber (2004) A Model for Holding Strategy in Public
Transit Systems with Real-Time Information. International Journal of Transport Management 2, p. 99-110.
Selecionando Indicadores
de Desempenho para
Praças de Pedágio
6
Marcelo Leismann de Oliveira
Helena Beatriz Bettella Cybis
Laboratório de Sistemas de Transportes – LASTRAN
Programa de Pós-Graduação em Engenharia de Produção – PPGEP
Universidade Federal do Rio Grande do Sul – UFRGS
Felipe Brum de Brito Sousa
Consórcio UNIVIAS
Resumo
Este trabalho apresenta um mecanismo de seleção de indicadores de
desempenho visando análises operacionais em praças de pedágio. Os indicadores em
avaliação foram obtidos através de revisão bibliográfica e pesquisa, considerando
o estado da prática brasileira. Características de qualificação de indicadores serão
utilizadas para julgamento, de forma a classificá-los em ordem de importância.
Após a avaliação, os indicadores com maiores índices foram “nível de utilização
das cabines”, seguido por “tamanho de fila máxima nas cabines”, “tempo máximo
de espera na fila” e “tempos de atendimento de veículos”. A utilização conjunta
de dois ou mais indicadores pode fornecer importante informação para análises
operacionais e a definição de escalas para níveis de serviço, avaliando-se tanto a
operacionalidade da praça, como também fatores de tráfego, e o inconveniente
percebido pelos usuários quando enfrantam diferentes situações de tráfego.
124
Transporte em Transformação XI
Abstract
This paper presents a mechanism for selection measures of efficiency for
operational analysis in toll plazas. The measures of efficiency to be evaluated were
obtained through bibliographical review and research considering the Brazilian state
of practice. Qualification characteristics are used for judgment and classification of
measures of efficiency in order of importance. According to the evaluation, the
measure of efficiency with higher indices were “level of utilization of tollbooths”,
“maximum length of queue in tollbooths”, “maximum waiting times in queue”
and “vehicle’s service times”. The conjoint utilization of two or more measures
of efficiency can supply important information for operational analysis and the
definition of scales for levels of service, evaluating operational efficiency of the
plaza also traffic factors and the inconvenient perceived by the drivers when facing
different situations of traffic.
1. Introdução
Com a transferência da administração de rodovias para a iniciativa privada,
ocorreu um aumento no número de praças de pedágio implantadas nas rodovias
concedidas brasileiras. Atualmente existem 201 praças de pedágio nas rodovias
brasileiras (ABCR, 2007a). Concessionárias filiadas a ABCR - Associação Brasileira
de Concessionárias de Rodovias - administram 175 praças de pedágio nos estados
do Espírito Santo (2), Bahia (1), Minas Gerais (3), Rio de Janeiro (20), São Paulo
(88), Paraná (27) e Rio Grande do Sul (34) (ABCR, 2007a). O poder público
administra 26 praças de pedágio, distribuídas nos estados de São Paulo (19), Rio
Grande do Sul (3), Ceará (1) e Mato Grosso do Sul (3) (ABCR, 2007b). A ANTT
– Agência Nacional de Transportes Terrestres – estima ainda que serão repassados
2600 quilômetros de rodovias para a administração privada, e implantadas mais 36
praças, com a segunda etapa do Programa de Concessões Federais (ANTT, 2007).
Sob o ponto de vista de engenharia de tráfego, uma praça de pedágio atua
como um gargalo ao fluxo normal de tráfego nas rodovias, já que todos os veículos
devem desacelerar e a maioria deve parar para realizar o pagamento das tarifas. O
congestionamento ocasionado em períodos de pico de tráfego está ligado diretamente
à relação entre a oferta e demanda de serviço nas praças, e atrasos gerados por elas
Selecionando Indicadores de Desempenho para Praças de Pedágio
125
podem ser indicativos para a adoção de medidas alternativas de projeto e operação
(Lin e Su, 1994). Medidas alternativas de projeto e operação estão relacionadas
diretamente com estratégias de análise do comportamento do fluxo de tráfego nas
praças, e com estimativas de parâmetros operacionais e escalas de níveis de serviço
ligados a eles.
Parâmetros operacionais são aqueles indicadores de desempenho (medidas de
eficiência) que captam quantitativamente as características de operação de tráfego.
Exemplos de indicadores são: (i) atrasos, (ii) relação entre volume e capacidade
(V/C) e (iii) tamanho de filas nas cabines. Algumas destes indicadores fazem parte
dos contratos de concessão rodoviária no Brasil (Oliveira e Cybis, 2006).
A avaliação do nível de serviço para praças de pedágio, por sua vez, ainda
não foi formalmente definida no Highway Capacity Manual 2000 (Kittelson e Roess,
2001). Devido a este fato, estudos sobre o tema divergem com relação aos indicadores
de desempenho que melhor caracterizam o funcionamento destas infra-estruturas.
Este artigo apresenta um mecanismo para avaliação da adequação de
indicadores de desempenho para análises de praças de pedágio. O atendimento
em praças de pedágio será enquadrado como um serviço prestado, abrangendo sua
qualidade, processos funcionais e indicadores. Os indicadores em avaliação neste
estudo foram obtidos através de revisão bibliográfica e pesquisa, considerando o
estado da prática brasileira. Serão analisados todos os indicadores obtidos, tanto
aqueles úteis para avaliações exclusivamente operacionais, quanto àqueles que
podem colaborar na obtenção de escalas de níveis de serviço. Características de
qualificação de indicadores serão utilizadas para julgamento, de forma a classificálos em ordem de importância.
2. Indicadores de Desempenho
Em função de sua natureza, a atividade de transportes é considerada um
serviço. A produção e o consumo da atividade de transporte são coincidentes, o
produto resultante da atividade não pode ser estocado e o cliente participa de sua
produção (Ortúzar e Willumsen, 1990). Da mesma forma, a atividade desenvolvida
em uma praça de pedágio pode ser medida através de mecanismos utilizados para
avaliar o desempenho de um serviço.
126
Transporte em Transformação XI
Uma maneira objetiva e sistêmica de acompanhamento e controle dos atributos
componentes dos transportes consiste na utilização de indicadores. Segundo
Rummler e Brache (1994), servem de base para: comunicar as expectativas de
desempenho esperadas; identificar falhas no desempenho e; fornecer feedback para
comparar seu desempenho a um padrão. Em outras palavras, os indicadores servem
como termômetros para premiar as melhores performances e punir as deficientes,
incentivando a competição (Aragão et al., 2000).
Assim, os indicadores são índices numéricos estabelecidos sobre os efeitos de
cada processo para medir o desempenho, sendo ferramentas valiosas nesse contexto
(Müller, 2003). Um sistema de análise de desempenho não é simplesmente a coleta
de dados para verificar se um produto ou serviço atingiu o padrão pré-definido,
mas sim um sistema global de gerenciamento, que também envolve prevenção e
detecção, visando alcançar conformidades destes produtos ou serviços de acordo
com o desejo de clientes/usuários (Jagdev et al., 2004).
A análise do serviço deve ser baseada em um número limitado de indicadores
de grande abrangência (Downs, 1988 apud Costa et al., 2001). Da mesma forma,
o processo de seleção e ponderação de indicadores precisa ter caráter dinâmico,
considerando os diferentes objetivos e os anseios dos usuários dos sistemas
de transportes (Lindau et al., 2001). Os objetivos envolvem as análises (i) das
percepções do inconveniente causado aos usuários devido a situações de tráfego, e
(ii) operacionais da própria concessionária.
2.1. Estado da Arte de Indicadores de Desempenho para Praças
de Pedágio
O desempenho e a qualidade de serviço mensurada por um indicador pode ser
comparada com valores padrões pré-fixados ou com medições anteriores do mesmo
indicador. Neste sentido surge o conceito de nível de serviço (TRB, 2003). O conceito de
nível de serviço foi originalmente desenvolvido em 1965 no Highway Capacity Manual,
e divide o desempenho de um indicador em 6 classes, onde cada classe é identificada
por uma letra, de “A” (mais alta qualidade) a “F” (mais baixa qualidade). O nível de
serviço deve medir o ponto de vista dos usuários e não do operador de transporte.
Praças de pedágio devem ser analisadas, como qualquer outra infraestrutura
de transportes, quanto à qualidade de serviço oferecido aos usuários. O HCM-2000
Selecionando Indicadores de Desempenho para Praças de Pedágio
127
e a bibliografia não apresentam metodologia tacitamente aceita para este fim, por
este motivo estudos que buscam analisar praças divergem com relação a métodos e
indicadores de desempenho utilizados.
Em estudo pioneiro sobre a operação e otimização da coleta manual de
pedágios, Edie (1954) utiliza, como indicador de desempenho, atrasos médios por
veículo e fila máxima nas cabines como critério para avaliação do desempenho
operacional de praças de pedágio.
O atraso total gerado pelas praças foi utilizado como indicador de desempenho
na definição de níveis de serviço por Zarrillo (1998), Polus (1996) e Gulewicz e
Danko (1995). Considera-se atraso total, neste caso, a soma dos atrasos sofridos
por todos os veículos, que são obrigados a praticar velocidades inferiores, devido
à presença da praça de pedágio no sistema. Burris e Hildebrand (1996) utilizaram
comprimento médio de fila e tempo médio no sistema como indicadores de
desempenho para avaliar o desempenho de praças. Outro indicador verificado foi
o tempo de espera do usuário na fila para pagamento (Wanisubut, 1989 e Nielsten,
1988 apud Zarrillo, 1998).
O atraso médio por veículo, gerado pelas paradas nas filas, também foi
utilizado como indicador de desempenho para avaliar a operação de praças por
Fan e Saito (1998). Como indicado por Schaufler (1997), o tamanho das filas e os
atrasos são utilizados por diversas agências de transportes norte-americanas como
indicadores de desempenho para avaliar alternativas de planejamento e projeto para
praças de pedágio.
Al-Deek e Radwan (1995) sugerem um sistema para avaliação do nível
de serviço nas praças, com cobrança eletrônica de pedágios, baseado em vários
indicadores incluindo o tempo médio de espera por veículo e relação volumecapacidade (V/C). Assim como Woo e Hoel (1991), que sugerem que a relação
volume-capacidade, agregada para todas as cabines da praça, pode ser utilizada
para classificar o nível de serviço.
O indicador de desempenho comumente utilizado para determinação do
nível de serviço em rodovias e interseções é a relação volume-capacidade (TRB,
2000). Lin e Su (1994) acrescentam que, para praças de pedágio, a relação volumecapacidade (V/C) é mais fácil de ser obtida em campo do que outros indicadores.
128
Transporte em Transformação XI
A relação volume-capacidade (V/C) foi largamente utilizada para
determinação do nível de serviço nas praças. Porém, Zarrillo (2000) contesta
que a relação volume-capacidade (V/C) é inadequada para avaliação de praças de
pedágio, pois a capacidade é dependente de fatores humanos que influenciam no
tempo de atendimento e escolha da forma de pagamento, portanto muito variável.
Oliveira et al. (2003) também realizaram estudo sobre a influência de fatores
humanos (motoristas e arrecadadores) nos tempos de atendimento e capacidades de
processamento nas cabines, chegando a conclusão de que estes fatores não devem
ser desprezados em análises de capacidade em praças de pedágio.
Em estudo mais recente, Klodzinski e Al-Deek (2002) propõem uma avaliação
do nível de serviço baseado na formação de grupos de veículos que sofreram o
mesmo atraso individual acumulado (em segundos). De acordo com o estudo, o
atraso experimentado por 85% do total de veículos que atravessam a praça pode ser
tomado como indicador de desempenho na determinação do nível de serviço geral
da praça em estudo.
Em trabalho desenvolvido por Horn (2003), são utilizados indicadores de
desempenho genéricos para praças de pedágio, correspondentes, em sua maioria, a
indicadores provenientes do micro simulador de tráfego, já que praças são simuladas
em conjunto com rodovias e entornos. Para praças, os indicadores de desempenho
escolhidos são apresentados por cabine de atendimento.
A tabela 1 apresenta um resumo, e os respectivos níveis de agregação, de
alguns indicadores de desempenho encontrados na literatura quando da avaliação
de praças de pedágio.
Selecionando Indicadores de Desempenho para Praças de Pedágio
129
Tabela 1 - Indicadores de desempenho para praças de pedágio encontrados na literatura
Estudos
Indicadores de Desempenho
Edie (1954)
Atraso Médio; e Fila Máxima
Individual por veículo; e por cabine
da praça
Nível de Agregação
Wanisubut (1989) e Nielsten
(1988) apud Zarrillo (1998);
Tempo de Espera na Fila
Individual por veículo
Woo e Hoel (1991)
Relação Volume–Capacidade (V/C)
Agregado para toda a praça
Burris e Hildebrand (1996) e
Lin e Su (1994)
Comprimento Médio de Fila; e Tempo
Médio no Sistema
Por cabine; e Individual por veículo
Gulewicz e Danko (1995)
Comprimento de Fila; e Tempo de Espera
Médio
Individual por cabine
Al-Deek e Radwan (1995)
Tempo Médio de Espera na Fila; e
Relação Volume-Capacidade (V/C)
Individual por veículo; e (V/C) agregado
para toda a praça
Morin et al. (1996)
Comprimento de Filas; e Tempos
de Espera
Por cabine; e para cada forma de coleta
de pedágio (incluindo mix de formas)
Polus (1996)
Atraso Total
Agregado para toda a praça
Zarrillo (1998)
Atrasos; Tamanho de Fila Máxima
Agregado para toda a praça ou por
cabine; e por cabine.
Fan e Saito (1998)
Atraso Médio de Parada nas Filas
Individual por veículo
Van Dijk et al. (1999)
Tempos de Espera; Tamanho de Fila
Máxima; e Nível de Utilização das Cabines
Agregado para toda a praça; separado
por intervalos; por cabine - (%) de
utilização das cabines
Astarita et al. (2001)
Capacidade de Processamento da praça;
Atraso Médio; e Nível de Utilização das
Cabines
Agregado para toda a praça; atraso
médio de cada veículo; por cabine - (%)
de utilização das cabines
Klodzinski e Al-Deek (2002)
Atraso Individual Acumulado
Individual por veículo
Horn (2003)
Velocidades, Volume, atraso, Filas,
Número de troca de Pistas, Consumo de
Combustível e Emissão de Poluentes
Individual por cabine para cada praça de
pedágio simulada
Nota-se que a relação volume-capacidade (V/C) foi medida utilizada na
verificação do funcionamento de praças em trabalhos mais antigos, revelando a
tentativa de adaptação de métodos já existentes no HCM para análises de praças de
pedágio.
O indicador de desempenho mais freqüentemente encontrado nos trabalhos
levantados nesta revisão bibliográfica foi o tempo de espera na fila, aparecendo em
cinco trabalhos. Atraso médio por veículo, fila máxima observada e comprimento
médio de fila foram indicadores também encontrados com freqüência, sendo
sugeridos em três dos dezesseis trabalhos levantados. Indicadores de desempenho
130
Transporte em Transformação XI
que apresentaram duas observações cada foram: (i) atrasos totais; (ii) nível de
utilização das cabines e (iii) a relação volume-capacidade. E, por último, com uma
observação cada, estão os indicadores: (i) tempo médio no sistema e (ii) atraso
individual acumulado. Destacando que autores podem apresentar, em um mesmo
trabalho, vários indicadores de desempenho.
Existem algumas considerações quando tratamos de indicadores de
desempenho relacionados a atrasos. Em praças de pedágio existem três principais
atrasos: (i) aqueles que são sofridos pelos veículos devido às filas nas cabines, (ii)
aqueles que são resultados da diferença de velocidades devido à presença da praça
de pedágio no sistema, ou seja, diferença entre o tempo gasto para percorrer a mesma
seção de rodovia com e sem a praça de pedágio, e (iii) atrasos vivenciados pelos
veículos quando executando o pagamento de tarifas. Atrasos totais ou acumulados
seriam aqueles atrasos onde estão somados todos os atrasos vivenciados pelos
veículos no sistema de pedagiamento, com desacelerações, espera na fila, tempo
para atendimento e reaceleração para retomada de velocidade.
2.2. Estado da Prática sobre Indicadores de Desempenho para
Praças de Pedágio
Oliveira e Cybis (2006) realizaram estudo qualitativo/quantitativo sobre o
estado da prática brasileira a respeito de indicadores de desempenho para praças
de pedágio. Enviaram pesquisa a todos os gerentes operacionais de concessionárias
filiadas a ABCR - Associação Brasileira de Concessionárias de Rodovias. As
respostas obtidas conseguiram englobar um terço do total de concessionárias
pesquisadas.
Os indicadores que mais apareceram em contratos daquelas concessões
pesquisadas, de acordo com seus gerentes operacionais, são o “tempo máximo
de espera na fila” e o “tempo de atendimento de veículos”, com seis observações
cada. A revisão bibliográfica apresenta o “tempo máximo de espera na fila” como
indicador de desempenho mais utilizado dentre os trabalhos levantados sobre praças
de pedágio. O “tempo de atendimento de veículos” nas cabines não foi observado
na literatura.
O “tamanho de fila máxima nas cabines” apresentou quatro observações, e o
“tempo médio de espera na fila” foi informado pertencer a um contrato de concessão.
Selecionando Indicadores de Desempenho para Praças de Pedágio
131
Oliveira e Cybis (2006) também realizaram levantamento a respeito de
alterações contratuais envolvendo indicadores de desempenho. Todos os gerentes
operacionais pesquisados informaram que não ocorreram modificações em seus
contratos de concessão, no que diz respeito a alterações ou adoção de indicadores
para praças de pedágio. Uma exceção foi verificada, onde ocorreram mudanças nos
limites originalmente estabelecidos para tempos máximos de espera na fila, além
de incorporação de indicador novo: “tempos de atendimento nas cabines” (Oliveira
e Cybis, 2006).
Foi realizado levantamento sobre utilização de indicadores de desempenho
diferentes daquelas previstos em contrato, e as respostas foram muito variadas,
ficando a confiabilidade destas bastante limitada, de acordo com Oliveira e Cybis
(2006). Porém, dois indicadores mereceram destaque: “número de reclamações” e
“nível de utilização das cabines”.
O “número de reclamação”, apesar de não ser um indicador de desempenho
para praças de pedágio, pode fornecer indicativos sobre o processamento do fluxo
de tráfego nas praças quando motoristas vivenciam altos atrasos com filas longas. Já
o “nível de utilização das cabines”, que possui duas observações na literatura, não é
indicador diretamente relacionado à verificação de níveis de serviço, contudo pode
ser utilizado como indicador de desempenho na formação de estratégias operacionais
de aberturas de cabines. Este mede a porcentagem de fluxo de tráfego processado
por cabine em determinado intervalo de tempo, além de fornecer informação sobre
possíveis capacidades de processamento ociosas. Cabines em extremidades opostas
da praça podem apresentar diferentes taxas de ocupação, o que pode ser ocasionado
por preferências de motoristas na escolha da cabine para pagamento ou influencia
do layout da praça, quando filas em cabines tornam-se longas o suficiente para
bloquear o acesso de veículos em cabines adjacentes (fenômeno de SpillBack
reportado por Astarita et al., 2001).
3. Mecanismo de viabilidade de utilização de indicadores
A revisão bibliográfica e a análise do estado da prática brasileira forneceram
um número considerável de indicadores que podem ser utilizados na avaliação
operacional de praças de pedágio, e nesta seção será apresentado mecanismo para a
verificação de viabilidade de utilização destes indicadores listados.
132
Transporte em Transformação XI
A proposta consiste na aplicação de um mecanismo de cálculo, baseado na
análise de características que devem possuir os indicadores de desempenho de
serviços. Este mecanismo de análise possibilita destacar resumidamente quais são
os benéficos e/ou problemas específicos de cada indicador quando da sua obtenção,
representatividade e utilização.
3.1. Critérios de Julgamento para Análise de Viabilidade de Indicadores
Para analisar a viabilidade de utilização de cada um dos indicadores listados,
primeiramente é necessário determinar quais são as características ou critérios
básicos presentes nos indicadores que os distinguem entre si. Aqui, é importante
diferenciar o termo “viabilidade” do termo “possibilidade”. Já que, no limite, todos
os indicadores são possíveis de serem calculados e utilizados, contudo alguns deles
não são viáveis, devido à inexistência de dados, ao elevado custo de obtenção ou
baixa representatividade, dentre outros aspectos.
Caplice e Sheffi (1994) realizaram amplo estudo na área de logística buscando
determinar características que devem possuir os indicadores de desempenho voltados
para a análise de serviços. Dentre as características levantadas pelos autores, serão
utilizadas neste estudo aquelas que possuem representatividade e coerência com o
objetivo deste trabalho. Eventualmente, em outros estudos sobre indicadores, os critérios
de julgamento podem ser diferentes. Os critérios citados em Caplice e Sheffi (1994) e
utilizados neste estudo serão: (i) Validade - um indicador é válido se consegue refletir
a atividade que está sendo desenvolvida sem que seja afetado por fatores externos ao
processo (ex.: condições meteorológicas); (ii) Robusteza - um indicador é robusto
se é amplamente aceito, interpretado similarmente por diferentes usuários e pode ser
utilizado para comparações através do tempo, locais e organizações; (iii) Utilidade - um
indicador é útil se é facilmente compreendido pelos tomadores de decisão, e fornece
sugestão de melhorias no serviço sendo prestado; (iv) Integração - um indicador é
integrador se incorpora todos os componentes e aspectos do processo medido (abrange
o macro-processo de transposição de praças de pedágio), e; (v) Compatibilidade de
Dados – um indicador é compatível com os dados e informações existentes e disponíveis
se não necessitar de esforço extra para ser utilizado.
No último critério de avaliação serão ainda analisados os sub-critérios de
(i) existência, (ii) disponibilidade e (iii) adequação dos dados. Existência – se
Selecionando Indicadores de Desempenho para Praças de Pedágio
133
dados existem, existem parcialmente ou não existem para o cálculo do indicador;
Disponibilidade – se dados, para o cálculo do indicador, estão disponíveis
eletronicamente, se necessitam levantamento em campo, se não estão disponíveis
ou não existem, e; Adequação – se dados são adequados para uma aplicação direta
no cálculo do indicador, se necessitam de algum tratamento para serem utilizados,
se são inadequados ou se não existem.
Procurou-se aqui não analisar a confiabilidade dos dados a serem utilizados
para o cálculo de cada indicador. A justificativa estaria na dificuldade de padronização
dos (i) equipamentos de coleta e suas calibrações, (ii) formas de coleta praticadas e
(iii) treinamentos de equipes.
3.2. Escalas de Medidas para os Critérios e Sub-Critérios de Julgamento
Cada um dos critérios e sub-critérios de julgamento para o cálculo da viabilidade
de utilização de indicadores apresenta uma escala específica, e todas as escalas estão
contidas no intervalo entre 0 a 9 pontos. Contudo, nas escalas propostas, procura-se
ponderar dando ênfase às características boas através de pontuação 9, penalizando
aquelas características intermediárias e ruins com notas 3 e 1, respectivamente, de
acordo com metodologia proposta por Akao (1996). A escala para cada critério está
descrita a seguir:
• Critério X1 (Validade): 9, se o indicador é válido, conseguindo refletir
a atividade medida sem sofrer interferência de fatores externos; 3, se o
indicador não está perfeitamente adequado, mas pode ser ajustado, e; 1,
se o indicador é pouco válido, medindo a atividade desenvolvida, porém
muito suscetível a fatores externos.
• Critério X2 (Robusteza): 9, se o indicador é amplamente aceito e
interpretado similarmente por diferentes usuários, podendo ser utilizado
para comparações através do tempo e organizações; 3, se o indicador é
aceito, porém causa dúvidas quando utilizado fora da organização que
lhe deu origem, e; 1, se o indicador não apresenta consenso para sua
utilização.
• Critério X3 (Compatibilidade de Dados): é calculado pela média
aritmética dos três sub-critérios que o compõe. A média aritmética foi
escolhida visando diminuir a influência de valores extremos (valores
muito baixos, ou muito altos) no cálculo final deste critério, mantendo
134
Transporte em Transformação XI
assim sua importância em relação aos demais critérios. Segundo Mandim
(2001), a média aritmética tem a característica de absorver diferenças
provocadas por valores extremos do conjunto. As escalas dos sub-critérios
que compõe este critério são:
m Sub-critério Y1 (Existência dos Dados): 9, se os dados existem; 3, se
dados existem parcialmente; 1, se dados não existem.
m Sub-critério Y2 (Disponibilidade dos Dados): 9, se a disponibilidade
é eletrônica; 3, se há necessidade de levantamentos em campo; 1, se
dados não estão disponíveis, e; 0 se dados não existem, ou seja, caso o
sub-critério Y1 seja igual a 1;
m Sub-critério Y3 (Adequação dos dados): 9, se dados estão adequados
para utilização direta no cálculo do indicador em questão; 3, se
dados necessitam algum tipo de tratamento ou ajuste para tornaremse adequados ao uso; 1, se dados são inadequados para o cálculo do
indicador, e; 0, se não existem, ou seja, caso o sub-critério Y1 seja
igual a 1.
• Critério X4 (Utilidade): 9, se o indicador é de fácil entendimento para
a tomada de decisão e fornece sugestão para atuação ou direção a ser
seguida; 3, se o indicador é compreensível, porém não fornece sugestão
para atuação ou direção a ser seguida, e; 1, se é pouco compreensível e
dúbio.
• Critério X5 (Integração): 9, se o indicador é amplamente integrador,
incorporando todos os componentes do macro-processo de transposição
de praças de pedágio; 3, se o indicador é pouco integrador, somente
incorporando parte do macro-processo medido, e; 1, se não é integrador.
É importante notar que, em função da escala adotada, nenhum dos critérios
pode apresentar valor nulo. Mesmo se dados não existirem para o sub-critério Y1,
o critério X3 será maior que zero.
3.3. Cálculo das Viabilidades de Utilização dos Indicadores
O cálculo das viabilidades dos indicadores é obtido através da média
geométrica (raiz quíntupla do produto dos cinco critérios). Aqui, todos os cinco
critérios apresentam o mesmo peso e grau de importância, portanto procuramse indicadores que satisfaçam todos os cinco critérios. Dessa forma, escolheu-
Selecionando Indicadores de Desempenho para Praças de Pedágio
135
se a média geométrica como ferramenta, já que é sensível a valores extremos,
favorecendo indicadores que apresentam valores altos para todos os critérios, e
penalizando àqueles cujo valor de algum dos critérios seja baixo. Procura-se aqui
obter o valor final mais próximo de 9, que é a nota máxima.
A figura 1 apresenta resumidamente as escalas dos critérios e dos sub-critérios
e o procedimento de cálculo da viabilidade de utilização dos indicadores.
Critérios
Sub-Critérios
X1 (Validade)
9 - Grande
3 - Média
1 - Baixa
Média Final
X2 (Robusteza)
9 - Grande
3 - Média
1 - Baixa
Y1 (Existência dos dados)
9 - Existem
3 - Existem Parcialmente
1 - Não Existem
X3 (Compatibilidade de dados)
Y2 (Disponibilidade dos dados)
9 - Eletrônica
3 - Levantamento em Campo
1 - Não Disponíveis
0 - Não Existem, Y1=1
5
YYY
X
3
123
�
�
3
X4 (Utilidade)
9 - Grande
3 - Média
1 - Baixa
X5 (Integração)
9 - Grande
3 - Média
1 - Baixa
Y3 (Adequação dos dados)
9 - Adequados
3 - Tratamento Necessário
1 - Inadequados
0 - Não Existem, Y1=1
Figura 1 - Procedimento de Cálculo da Viabilidade dos Indicadores.
4. Análise dos indicadores
Para fins de exemplificação, a avaliação dos indicadores foi realizada pelos
autores através de consenso a respeito das notas de cada critério e sub-critério para
cada indicador.
Após a aplicação do procedimento de avaliação, os indicadores com maiores
índices de viabilidade foram “nível de utilização das cabines” (5,80 pontos), seguido
136
Transporte em Transformação XI
por “tamanho de fila máxima nas cabines” (4,43 pontos), “tempo máximo de espera
na fila” (4,02 pontos) e “tempos de atendimento de veículos” (3,74 pontos).
1
2
3
4
5
7
8
9
5,80
nível de utilização das cabines
tamanho de fila máxima nas cabines
4,43
4,02
tempo máximo de espera na fila
tempo de atendimento de veículos
3,74
3,55
atraso médio por veículo
relação (V/C)
3,32
2,85
tamanho de fila média nas cabines
tempo de espera na fila por veículo
2,85
2,67
atraso individual acumulado por veículo
tempo de espera por forma de pgto
2,41
2,29
atraso total por praça
tempo de espera na fila por cabine
6
1,93
tempo médio no sistema por veículo
1,55
número de reclamações
1,55
Viabilidade
dos
Indicadores
Figura 2 - Valores de Viabilidade de Utilização dos Indicadores
Verifica-se que o indicador “nível de utilização das cabines” foi observado
duas vezes na literatura, e é utilizado na prática por concessionárias brasileiras,
apesar de não pertencer a contratos de concessão. Este indicador foi avaliado como:
(i) medianamente válido, pois é parcialmente suscetível a fatores externos; (ii)
de grande robusteza, pois é aceito na prática, além de interpretado similarmente
por diferentes usuários e pode ser utilizado para comparações através do tempo e
organizações; (iii) seus dados existem nos sistemas eletrônicos das concessionárias,
estão disponíveis e são adequados para um cálculo direto do indicador; (iv) de
grande utilidade, pois é facilmente compreendido e fornece sugestão para atuação
a ser tomada, e (v) de média integração, pois incorpora somente parte do macroprocesso de transposição das praças pelos veículos.
Os indicadores que aparecem em segundo e terceiro lugares são relativos a
medidas obtidas em filas, e possuem alta correlação entre sí: “tamanho máximo de
fila nas cabines” e “tempo máximo de espera na fila”. Ambos tem relação direta
Selecionando Indicadores de Desempenho para Praças de Pedágio
137
com o desconforto experimentado pelos usuários quando do ato de pagamento das
tarifas, representado forte apelo sensitivo. Ainda, apresentam características de fácil
mensuração prática pelos operadores, reforçando a necessidade de incorporação de
indicadores deste tipo no desenvolvimento de metodologia para avaliação do nível
de serviço nestas infraestruturas.
O indicador classificado em quarto lugar de acordo com o índice proposto,
porém não menos importante, foi “tempo de atendimento de veículos” nas cabines.
Esta colocação é justificada na medida em que avalia parte do macro-processo de
passagem dos veículos pela praça (momento do pagamento de tarifas), indicando
problemas com soluções pontuais, como treinamento de arrecadadores, por exemplo.
O “tempo de atendimento de veículos” possui representatividade para operadores,
que necessitam monitorar produtividade, mas é informação desagregada para avaliar
o desempenho da praça como um todo.
Dentre os indicadores citados na bibliografia ou na pesquisa a respeito do
estado da prática brasileira, aqueles que apresentaram piores índices de viablidade de
utilização foram “tempo médio no sistema por veículo” e “número de reclamações”,
ambos com 1,55 pontos. O “tempo médio no sistema por veículo” pode ser afetado
por fatores externos, é pouco robusto, possui baixa utilidade, pois mede muito
amplamento a situação de tráfego na praça, não fornecendo indicativos de atuação
a ser tomada, além de baixa integração. O “número de reclamações” é totalmente
suscetível a fatores externos, possui baixa robusteza, pois pode ser interpratado
diferentemente se avaliado por outra organização diferente daquela que lhe deu
origem, baixa utilidade, já que não fornece direção de atuação, e baixa integração,
pois não incorpora todos os detalhes do macro-processo de transposição de praças
de pedágio.
Contudo, a utilização conjunta de dois ou mais indicadores pode fornecer
importante informação para a definição de escalas para níveis de serviço, avaliandose tanto a operacionalidade da praça, de responsabilidade das concessionárias,
como também fatores aleatórios de tráfego, como escolha de cabines e formas
de pagamento por usuários, e o inconveniente percebido pelos mesmos quando
enfrentam diferentes situações de filas nas cabines.
Neste sentido, indicadores para praças de pedágio podem ser classificados
como (i) indicadores operacionais da operadora e (ii) indicadores de níveis de
138
Transporte em Transformação XI
serviço. Indicadores operacionais buscam analisar a operação das praças e fornecer
subsídios para uma operação eficiente, atendendo à restrições contratuais, diminuindo
custos (eficiência de mão-de-obra) e satisfazendo os usuários. Indicadores de níveis
de serviço possuem o objetivo de definir referências de comparação na forma de
escalas, que representem as opiniões dos usuários, seu desconforto e inconveniência
percebidos quando enfrantam determinadas situações de tráfego.
Aqueles indicadores aptos a representar escalas de níveis de serviço devem
ser: (i) válidos, conseguindo refletir a atividade medida sem que sejam afetados
por fatores externos ao processo; (ii) robustos, no sentido de amplamente aceitos,
interpretados similarmente por diversos usuários e possíveis de serem utilizados
através do tempo e organizações; (iii) úteis, sendo facilmente compreendidos e; (iv)
integradores, incorporando todos os componentes e aspectos do processo medido,
neste caso, abrangendo o macro-processo de transposição de praças de pedágio.
5. Considerações finais
Este trabalho apresentou um mecanismo de análise visando à seleção de
indicadores para praças de pedágio. Os indicadores analisados podem contribuir
para o acompanhamento operacional das praças (indicadores de desempenho e
eficiência interna das concessionárias) e para análises de níveis de serviço oferecido
aos motoristas (percepção do desconforto e inconveniência percebidos pelos
usuários de praças).
O mecanismo descrito neste estudo permitiu uma hierarquização dos diversos
indicadores de desempenho listados na revisão bibliográfica e em pesquisa sobre o
estado da prática brasileira quanto ao tema.
A importância do desenvolvimento de metodologia para avaliação de níveis
de serviço em praças está diretamente relacionada com a importância de obtenção
de indicadores amplamente aceitos e compreendidos, de fácil mensuração prática e
que possuam representatividade.
Apesar de não ser um indicador que verifique diretamente o nível de serviço
nas praças, o “nível de utilização das cabines” pode ser utilizado em conjunto com
outros indicadores para a verificação do comportamento do fluxo. Este indicador
Selecionando Indicadores de Desempenho para Praças de Pedágio
139
analisaria preferências aleatórias de usuários por formas e cabines de cobrança, que
poderiam implicar em subutilização da capacidade de processamento disponível. A
utilização de indicador que avalie a operacionalidade das praças em conjunto com
indicador que analise o desconforto sofrido pelos usuários é indicada.
Indicadores que medem as diversas situações enfrentadas pelos usuários em
filas de espera são altamente indicados para análises de níveis de serviço em praças.
Tempos de espera e tamanhos de filas foram indicadores de desempenho mais
encontrados na literatura e no estado da prática brasileira, e possuem relação direta
com o desconforto experimentado pelos motoristas quando do ato de pagamento
das tarifas, representando forte apelo sensitivo. O mecanismo de avaliação proposto
neste trabalho destacou a importância de dois indicadores: “tamanho de fila máxima
nas cabines” e “tempo máximo de espera nas cabines”. A correlação entre estes
indicadores é evidente, o que reforça ainda mais a importância.
Contudo, uma pesquisa ampliada utilizando o mecanismo apresentado neste
estudo deve ser realizada, visando a obtenção da percepção de outros agentes
envolvidos no processo.
140
Transporte em Transformação XI
Referências Bibliográficas
ABCR (2007a) Associação Brasileira de Concessionárias de Rodovias. Concessionárias Associadas. Disponível em http://www.abcr.org.br/conc/index.php, acessado
em 23/05/2007.
ABCR (2007b) Associação Brasileira de Concessionárias de Rodovias. Rodovias Pedagiadas Administradas pelo Governo. Disponível em http://www.abcr.org.br/etc/
ser_pedagios.php , acessado em 22/05/2007.
Akao, Y. (1996) Quality Function Deployment: Integrating Customer Requirements
Into Product Design. Productivity Press. Cambridge.
Al-Deek, H. M. e A.E. Radwan (1995) A framework for evaluation level of service
at electronic toll collection plazas. Proceedings of Transportation Congress: Civil
Engineers – Key to World Infrastructure, ASCE, v.2.
ANTT (2007) Agência Nacional de Transportes Terrestres. Concessões de Rodovias
Federais – Segunda Etapa (fevereiro de 2006). Disponível em: http://www.antt.
gov.br/relatorios/rodoviario/Novasconcessoes2.ppt. Acessado em 23/05/2007.
Aragão, J. J.; Brasileiro, A.; Limas Neto, O.; Santos, E.; Orrico Filho, R. (2000) Construindo Modelos de Relações Institucionais e Regulatórias no Transporte Público
Urbano: Algumas Considerações Metodológicas. In: Transporte em Tempos de
Reforma. Santos, E.; Aragão, J. LGE. Brasília.
Astarita, V., M. Florian e G. Musolino (2001) A Microscopic Traffic Simulation Model for the Evaluation of Toll Station Systems. The IEEE 4th International Conference on Intelligent Transportation Systems. Intelligent Transportation System
Council-ITSC, August 25-29, Oakland, California, EUA.
Burris, M. W. e E.D. Hildebrand (1996) Using Microsimulation to Quantify the Impact of Electronic Toll Collection. ITE Journal, v. 66, n. 7, p. 21–24.
Caplice, C. e Y. Sheffi (1994) A Review and Evaluation of Logistics Metrics. The
International Journal of Logistics Management, vol.5, no.2, p.11-28.
Costa, M. B. B; Lindau, L. A.; Sousa, F. B. B.; Fogliatto, F. (2001) Estudo Comparativo entre Empresas de Ônibus Utilizando AHP: O Caso das Empresas Consorciadas de Porto Alegre. In: Congresso de Pesquisa e Ensino em Transportes, XV,
Campinas. Anais...Campinas, v. 2, p. 135-142.
Edie, L.C. (1954) Traffic Delays at Toll Booths. Journal of Operations Research
Society of America, v.2, no.2, p. 107-138.
Fan, J. e M.S. Saito (1998) Application of Artificial Neural Network for Level of Service Analysis of Signalized Intersection. Proceedings of the 77th Annual Meeting
of the Transportation Research Board, Washington D.C., CD-ROM.
Selecionando Indicadores de Desempenho para Praças de Pedágio
141
Gulewicz, V. e J. Danko (1995) Simulation-Based Approach to Evaluation Optimal
Lane Staffing Requirements for Toll Plazas. Transportation Research Record
1484, Transportation Research Board, Washington, D.C.
Horn, M. (2003) Model Behavior - Feature Review. Traffic Technology International.
April-May, 2003, p.30-35.
Jagdev, H.S., A. Brennan, J. Browne (2004) Strategic Decision Making in Modern
Manufacturing. Kluwer Academic Publishers.
Juran, J. M. (1993) Juran na Liderança pela Qualidade (um guia para executivos).
Editora Pioneira. São Paulo.
Kittelson, W. K. e R. P. Roes (2001) Highway Capacity Analysis after the HCM 2000.
Presentation at the 80th Annual Meeting of the Transportation Research Board,
Washington, D.C., Janeiro de 2001, CD-ROM.
Klodzinski, J. e H.M. Al-Deek (2002) New Methodology for Defining Level of Service at Toll Plazas. Journal of Transportation Engineering, vol. 128, n. 2, p. 173181.
Lin, F. e C. Su (1994) Level-of-Service Analysis of Toll Plazas on Freeway Main
Lines. Journal of Transportation Engineering, v. 120, n. 2, p. 246-263.
Lindau, L. A.; Costa, M. B. B.; Sousa, F. B. B. (2001) Em Busca do Benchmark da
Produtividade de Operadores Urbanos de Ônibus. In: Transportes: Experiências
em Rede. Nassi, C.; Brasileiro, A.; Kawamoto; Lindau, L. A. FINEP, Rio de Janeiro, RJ.
Mandim, D. (2001) Estatística Descomplicada, 7o.edição, Ed. Vestcon, Brasília-DF.
Morin, J-M, G. Louah e B. Daviet (1996) ANATOLL-Software for Simulation and
Prediction of Queues at Toll Plazas: Characteristics and Evaluation. In: 3rd World
Congress on ITS, Orlando, Florida, US.
Müller, C. (2003) Gerenciamento de Processos e Indicadores de Desempenho. Apostila de aula – PPGEP - Programa de Pós-Graduação em Engenharia de Produção.
UFRGS - Universidade Federal do Rio Grande do Sul, Porto Alegre.
Normann, R. (1993) Administração de Serviços: Estratégia e Liderança na Empresa
de Serviços. Editora Atlas. São Paulo.
Oliveira, M.L., J.M.R. Neto e H.B.B. Cybis (2003) A Influência do Tamanho das Filas
na Capacidade de Atendimento das Praças de Pedágio. Anais do XVII Congresso
da ANPET - Rio de Janeiro, v.2, p.1264-1275, Associação Nacional de Pesquisa e
Ensino em Transportes-Rio de Janeiro.
Oliveira, M.L., e H.B.B. Cybis (2006) Medidas de Eficiência e Níveis de Serviço para
Praças de Pedágio na Percepção de seus Operadores. XIV-PANAM –Congresso
Panamericano de Engenharia de Trânsito e Transportes, Las Palmas de Gran
142
Transporte em Transformação XI
Canaria, Ilhas Canárias, Espanha. CD-ROM.
Ortúzar, J.D. e L.G. Willumsen (1990) Modelling Transport. Ed.John Wiley & Sons
Ltd, West Sussex, UK.
Polus, A. (1996) Methodology and Simulation for Toll Plaza Analysis. Road & Transport Research, vol. 1, no. 5
Rummer, G. A. e Brache, A. P. (1994) Melhores Desempenhos das Empresas. Makron
Books, São Paulo.
Schaufler, A. E. (1997) Toll Plaza Design - Synthesis of Highway Practice 240. National Cooperative Highway Research Program, Transportation Research Board,
Washington, D.C.
TRB (2000) Highway Capacity Manual - Special Report 209 (4th. edition). Transportation Research Board, National Research Council, Washington, D.C., EUA.
TRB (2003) Transit Capacity and Quality of Service Manual (2nd Edition). Transportation Research Board. Disponível em: http://www.trb.org. Acessado em:
10/05/2007.
Van Dijk, N.M., M.D. Hermans, M.J.G. Teunisse e H. Shuurman (1999) Designing
the Westerscheldetunnel Toll Plaza Using a Combination of Queueing and Simulation. In: Proceedings of the 1999 Winter Simulation Conference. p.1262-1279.
Netherlands.
Woo, T.H. e L. H. Hoel (1991) Toll Plaza Capacity and Level of Service. Transportation Research Record 1320, p.119-127.
Zarrillo, M. L. (1998) Development and Applications of TPMODEL: A Queuing model describing Traffic Operations during Electronic Toll Collection (ETC). Ph.D.
Thesis. University of Central Florida - UFC, Florida, US.
Zarrillo, M. L. (2000) Capacity Calculations For Two Toll Facilities: Two Experiences
in ETC Implementation. Proceedings of the 79th Annual Meeting of the Transportation Research Board, Washington, D.C., Janeiro de 2000, CD-ROM.
Marcelo Leismann de Oliveira [email protected])\ Laboratório de Sistemas de
Transportes – LASTRAN
Helena Beatriz Bettella Cybis ([email protected]) Universidade Federal
do Rio Grande do Sul – UFRGS
Felipe Brum de Brito Sousa ([email protected])
Consórcio UNIVIAS
Marcelo Leismann de Oliveira ([email protected]) Laboratório de Sistemas de Transportes – LASTRAN
Helena Beatriz Bettella Cybis ([email protected]) Universidade Federal do Rio Grande do Sul – UFRGS
Felipe Brum de Brito Sousa ([email protected]) Consórcio UNIVIAS
Avaliação da Eficácia da
Gestão do Trânsito em
Nível Municipal
7
Luis Cláudio Rodrigues de França
Maria Alice Prudêncio Jacques
Universidade de Brasília
Programa de Pós-Graduação em Transportes
Resumo
Este trabalho visa contribuir com a gestão pública municipal de trânsito
no Brasil, por meio do desenvolvimento de um procedimento capaz de avaliar
sistematicamente a eficácia dessa gestão. É empregado o modelo de análise
multicritério AHP, implementado com uma ferramenta computacional disponível
no mercado, que contempla uma seqüência lógica de atividades voltada à
determinação da eficácia da gestão do trânsito no município de forma global e
específica. O procedimento é suficientemente flexível para permitir que cada órgão
gestor municipal defina quesitos próprios de avaliação, que reflitam efetivamente
os objetivos da gestão do trânsito no seu município. Ele foi elaborado a partir de
dados de seis municípios brasileiros, e seus resultados mostraram-se satisfatórios
e compatíveis com os produzidos por avaliações efetuadas por técnicos que atuam
em alguns dos municípios pesquisados.
144
Transporte em Transformação XI
Abstract
This work seeks to contribute to municipal traffic management in Brazil.
It aims to develop a procedure able to systematically assess traffic management
effectiveness at municipal level. The procedure proposed adopts the AHP
multicriteria analysis model, implemented through an available computational
program. It covers a logical sequence of activities that allows for determining
the municipality’s traffic management effectiveness both in global as well as
specific terms. The procedure is flexible enough so as to allow for each municipal
management agency to define its own factors to be assessed and which clearly
reflect the municipality’s traffic management objectives. Its development was based
upon data from six Brazilian municipalities. The results obtained were satisfactory
and compatible to those produced by the technical staff of some municipalities that
participated in the research.
1. Introdução
Com a promulgação do Código de Trânsito Brasileiro (CTB) em 1997, os
municípios assumiram a incumbência de gerenciar o seu trânsito, somando à sua
responsabilidade a competência para atuar nessa área atendendo aos interesses e
peculiaridades locais. Nesse sentido, cada município pode optar por municipalizar,
assumindo diretamente as competências especificadas no Art. 24 do CTB, ou
delegando as competências, por meio de convênios, a outros órgãos e entidades
de trânsito conforme Art. 25 do CTB. Podem, ainda, estabelecer consórcios
públicos para a gestão associada do trânsito. Esta prerrogativa lhes é facultada pela
Constituição Federal, através do Art. 241.
Os municípios brasileiros têm relutado em assumir o encargo da municipalização
do trânsito. De acordo com dados do DENATRAN (2007), apenas 825 municípios
já assumiram efetivamente o gerenciamento do seu trânsito, o que corresponde a
14,83 % do total de 5.563 municípios brasileiros. Várias são as razões que podem
ser apontadas para explicar a demora dos municípios brasileiros em se integrarem
ao Sistema Nacional de Trânsito (SNT). Entre elas destacam-se:
a) a falta de mão de obra qualificada para implementar e gerir o órgão de
trânsito no município;
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
145
b) a falta de recursos financeiros necessários para manter e equipar o
órgão de trânsito. Para o executivo municipal, a municipalização do
trânsito vem apenas onerar o orçamento e levar o município à perda da
qualidade dos demais serviços prestados à comunidade, sem a devida
contrapartida em termos da melhora das condições de mobilidade e
segurança dos veículos e pedestres;
c) a falta de uma avaliação sistemática da gestão dos órgãos já integrados
de modo a produzir parâmetros para os municípios que ainda não se
integraram ao SNT. Os resultados da municipalização do trânsito no
Brasil não têm sido avaliados de forma sistemática e padronizada, de
modo a produzir informações que indiquem aos municípios que ainda
não se integraram ao SNT, a eficácia do processo de municipalização
ocorrido sob diferentes concepções de gestão. Estas informações
poderão mostrar aos executivos municipais que o planejamento
integrado dos transportes, do trânsito e do sistema viário permite
melhorar a qualidade de vida dos cidadãos, diminuindo os acidentes
em suas vias, o tempo e o custo dos deslocamentos e os gastos da
máquina pública, além de aumentar a acessibilidade aos equipamentos
urbanos e o valor do uso do solo.
Entre os problemas levantados, o presente trabalho se concentra no último. Isto
é, aborda a questão do desenvolvimento de uma ferramenta que permita, de forma
simples e efetiva, os municípios já integrados ao SNT, avaliarem de forma sistemática
a eficácia dos resultados alcançados com a gestão do trânsito após sua integração.
Essa avaliação deverá contribuir com a explicitação dos objetivos propostos e dos
benefícios alcançados com a municipalização do trânsito, produzindo parâmetros
de gestão para os municípios que ainda não se integraram, devido à insegurança em
relação à eficácia desta iniciativa.
2. Municipalização do Trânsito no Brasil
A municipalização do trânsito é o processo legal, administrativo e técnico, por
meio do qual o município assume integralmente a responsabilidade pelos serviços
de engenharia, fiscalização e educação de trânsito; levantamento, análise e controle
de dados estatísticos e pelas juntas administrativas de recursos de infrações (JARI)
146
Transporte em Transformação XI
dentro de sua circunscrição (Brasil, 1997). É a forma de garantir ao administrador
municipal as condições básicas para atender a gestão do trânsito no município de
forma direta, ou seja, assumindo as questões relacionadas à circulação de pessoas
e mercadorias, ao estacionamento, à parada de veículos e animais, à implantação e
manutenção da sinalização de trânsito, entre outras.
A Municipalização do Trânsito incorpora às análises dos sistemas de transporte,
os aspectos administrativos, institucionais e políticos, na busca do funcionamento
eficiente e harmônico do planejamento de transportes e trânsito, para que esses
exerçam sua função de permitir o pleno desenvolvimento das demais atividades
sociais e econômicas do município.
Nesse sentido, o município passa a ter direitos e obrigações atribuídos pela CTB
nos aspectos legais, institucionais, financeiros e técnicos, conforme apresentado, de
forma resumida, na Tabela 1.
2.1. Situação Atual dos Municípios Brasileiros Frente à Municipalização
Apesar das vantagens intrínsecas da municipalização do trânsito, os municípios
brasileiros têm relutado em assumir o encargo desta municipalização. De acordo com
dados do DENATRAN (2007), apenas 825 municípios estão municipalizados, o que
corresponde aproximadamente 14,83% do total de 5.563 municípios brasileiros.
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
147
Tabela 1: Resumo das principais obrigações e direitos dos municípios
ÁREA
Legal
ARTIGO
OBRIGAÇÕES E DIREITOS
Art. 24 e 21
Art. 1º
Art. 73
Art. 75
Art. 74
Art. 74
Art. 93, 94 e 95
Municipalizar o trânsito
Assegurar o direito ao trânsito em condições seguras
Responder às solicitações dos cidadãos
Participar de programas nacionais de educação e segurança de trânsito
Criar área de educação
Criar Escola Pública de Trânsito
Adequar legislação municipal referente a: calçada, passeio, obras e
eventos na via e fora da via etc.
Fiscalizar o trânsito diretamente através de seus agentes próprios
ou indiretamente, através da Polícia Militar (sempre com base em
convênio), autuando, aplicando as penalidades de multa e arrecadando
as multas que aplicar (diretamente através da arrecadação própria ou
indiretamente através do Detran).
Art. 24, 23 e 21
Art. 8
Art. 16
Art. 24 e 21
Art. 25
Institucional
Art. 25
Art. 25
Financeira
Técnica
Organizar e criar órgão ou entidade municipal de trânsito
Criar a JARI
Integrar-se ao SNT
Firmar convênio com o Governo do Estado sobre: acesso ao cadastro
de veículos, bloqueio e desbloqueio de documentos; gestão de trechos
de rodovias estaduais (se for o caso) etc.
Firmar convênio com o Governo Federal sobre gestão de trechos de
rodovias federais (se for o caso)
Firmar convênio com outros órgãos ou entidades municipais (se for o
caso).
Art. 320
Art. 320
Art. 16 e 337
Aplicar recursos das multas e taxas cobradas em projetos de trânsito
Repassar 5% das multas para programas nacionais
Apoiar financeiramente a JARI e o CETRAN.
Art. 24 e 21
Planejar, organizar e operar o trânsito no âmbito da circulação, do
estacionamento e da parada do veículo.
Responsabilizar-se pela implantação e manutenção da sinalização de
trânsito
Autorizar e fiscalizar obras na via ou fora da via pública
Controlar circulação de veículos especiais
Analisar projetos de pólos geradores
Art. 24 e 21
Art. 95
Art. 24 e 21
Art. 93
(DENATRAN, 2007)
148
Transporte em Transformação XI
Até 1998 o Brasil só possuía 17 prefeituras efetuando a gestão do trânsito, dos
5.563 municípios espalhados em todo o seu território. Dentre elas se encontravam
São Paulo, Belo Horizonte, Porto Alegre, Aracaju, Contagem e mais 12 municípios
paulistas prontos para exercerem legalmente a gestão do trânsito. Com o advento
do CTB, o número de municípios integrados ao SNT veio aumentando ano a ano,
conforme é mostrado na Tabela 2.
Dentre os estados brasileiros, o Rio de Janeiro é o que vem se destacando
com 60,87% dos municípios integrados ao SNT, seguido por Mato Grosso de Sul
(38,46%) e São Paulo (36,12%). Os Estados com pouca representação, segundo
o DENATRAN (2007), são: Tocantins (2,16%), Piauí (2,24%), Minas Gerais
(3,75%), Bahia (5,28%) e, ainda, Acre e Roraima, com somente o município da
capital integrado ao SNT.
Não há uma explicação técnica (incentivos ou campanhas), para o aumento
significativo apresentado no número de municípios integrados ao SNT nos anos
de 1999 e 2002, a não ser a própria imposição do CTB. Mas este crescimento foi
pequeno se compararmos ao número de municípios que o país possui (5.563), nove
anos passados da data de promulgação do CTB.
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
149
Tabela 2: Histórico do processo de municipalização do trânsito no Brasil
Trânsito Municipalizado
Estados
Municípios
Acre
22
Alagoas
102
Amazonas
62
Amapá
16
Bahia
417
Ceará
184
Espírito Santo
Goiás
Maranhão
217
Minas Gerais
853
Mato Grosso
141
Mato Grosso do Sul
Pará
Paraíba
223
Pernambuco
Antes
de
1998
1998
1999
1
3
2000
2001
2002
1
1
2003
Após
2003
1
1
1
1
1
1
Total
1
% dos Municípios
Municipalizados
4,55%
2
9
8,82%
6
8
12,90%
3
18,75%
11
22
5,28%
15
46
25,00%
7,69%
1
3
2
1
5
2
5
2
5
11
6
78
2
3
1
6
246
1
3
2
4
4
1
7
22
8,94%
4
1
3
6
7
24
45
20,74%
3
2
3
8
5
8
32
3,75%
5
3
1
4
2
4
19
13,48%
78
10
3
2
1
1
13
30
38,46%
143
5
3
2
5
4
12
31
21,68%
2
10
2
1
1
6
22
9,87%
185
3
3
2
1
5
18
9,73%
Piauí
223
1
1
3
5
2,24%
Paraná
399
Rio de Janeiro
Rio Grande do
Norte
Rio Grande do Sul
92
167
Roraima
15
Rondônia
52
Santa Catarina
293
Sergipe
75
1
São Paulo
645
13
11
62
496
2
1
4
3
3
1
1
6
2
16
28
7,02%
7
2
7
56
60,87%
13
7,78%
106
21,37%
26
5
6
10
2
1
32
20
3
3
8
2
3
3
7
1
8
1
26
11
1
12
1
6,67%
4
6
11,54%
20
53
18,09%
4
7
9,33%
233
36,12%
40
29
41
1
3
2,16%
249
825
14,83%
26
100,0%
Tocantins
139
Total Município
5563
17
29
195
78
58
119
80
26
4
6
10
1
3
1
1
Capitais Estaduais
39
1
1
(DENATRAN, 2007)
A região geográfica mais bem representada em termos de gestão do trânsito
realizada pelos municípios, é a Região Sudeste, que possui 39,6% dos seus
municípios integrados ao Sistema Nacional de Trânsito (Figura 1). Nesta região,
o município precursor foi São Paulo, que teve seu processo de municipalização do
trânsito iniciado em 1973 (Vasconcellos, 1999).
150
Transporte em Transformação XI
A Figura 1 permite verificar, também, a percentagem da frota veicular em cada
região, e no Brasil como um todo, que pertence aos municípios integrados ao sistema.
Embora em torno de 72% da frota nacional pertença aos municípios integrados,
verifica-se que esse resultado decorre principalmente do porte desses municípios
localizados na Região Sudeste. Para as demais regiões, como a percentagem da
frota integrada é menor que a dos municípios pertencentes ao sistema, é possível
concluir que alguns municípios de grande porte dessas regiões ainda precisam ser
integrados.
80,0%
70,0%
60,0%
50,0%
40,0%
30,0%
20,0%
10,0%
0,0%
71,9%
64,0%
39,6%
22,7%
8,6% 6,1%
CENTROOESTE
6,4%
22,7%
15,5%
3,1%
NORTE
SUL
SUDESTE
Municípios Integrados
11,3% 14,8%
NORDESTE
BRASIL
Frota Integrados
Figura 1: Participação dos municípios com o trânsito municipalizado e frota veicular dentro de cada região geográfica
Apesar dos esforços do DENATRAN em acompanhar as atividades dos
municípios integrados ao Sistema Nacional de Trânsito, vale destacar que o órgão
ainda não dispõe de uma forma de verificação e acompanhamento sistemáticos
da eficácia com que esses municípios vêm gerindo o seu trânsito e cumprindo as
atribuições exigidas pelo CTB.
3. Técnica de Análise Multicritério
A análise de multicritério tem como objetivo identificar e selecionar o melhor
curso a tomar, quando existe um problema de decisão que envolve uma complexidade
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
151
elevada, devido à dificuldade de mensuração adequada para variáveis qualitativas
como qualidade ambiental, saúde, felicidade, realização pessoal, etc. O método
multicriterial de avaliação ajuda no processo, pois utiliza medições que permitem
avaliar de maneira igualitária, tanto os aspectos subjetivos como objetivos da
situação considerada (Lucena, 1999).
No processo multicriterial de decisão existe um decisor (ou vários) que toma a
decisão; um conjunto de objetivos a serem perseguidos e um conjunto de alternativas
das quais uma será selecionada. Desta forma, um processo de decisão multicritério
trabalha com termos como ator, objetivos, metas, critérios, atributos, restrições e
suas relações. Em termos gerais, a análise multicritério sempre opera segundo um
esquema seqüencial de fases, não estático nem linear, que pressupõe realimentações,
revisões e reformulações no decorrer do processo. Através da análise multicritério
é possível gerar soluções compromisso ou uma hierarquização das alternativas, de
acordo com o grau de atração destas para o tomador de decisão. Classicamente,
esta análise é usada para a definição de três problemáticas: ordenação, escolha e
alocação em classes (Mello et al, 2002).
Segundo Baasc (1995) as etapas básicas do processo da análise multicritério
são: definição das ações potenciais ou desejáveis a serem analisadas, formulação dos
critérios de análise, avaliação das ações com base em cada critério e agregação final,
utilizando um dos vários métodos multicritério. Para Bana e Costa, apud Ensslin
et al (2001), as etapas são duas: a de estruturação e a de avaliação. Esses autores
indicam que a análise multicriterial é classificada tradicionalmente em duas classes:
Decisão com múltiplos atributos e Decisão com múltiplos objetivos. Dentro dessas
classes existem diversos métodos utilizados atualmente, dentre os quais optou-se
neste trabalho pelo método AHP de Saaty (Analytic Hierarchy Process). Esta opção
decorreu do fato do método permitir a análise do problema através da estruturação
hierárquica, e da possibilidade de análise de sensibilidade dos critérios utilizados.
Isto é, ele possibilita uma tomada de decisão mais objetiva, o que facilitaria a
consecução dos objetivos do presente trabalho.
O método AHP consiste em construir uma estrutura hierárquica do problema
de decisão, efetuando uma comparação relativa entre pares dos elementos da
hierarquia e finalizando o processo com uma série de julgamentos, objetivando
priorizar os fatores na análise das diversas alternativas. Este método também
utiliza a técnica dos pesos para classificar seus elementos, sejam eles objetivos ou
152
Transporte em Transformação XI
fortemente caracterizados por análises subjetivas. O processo, de uma forma geral,
segue quatro etapas básicas: (i) estruturação hierárquica; (ii) comparação paritária
dos elementos em cada nível do sistema (critério e sub-critério); (iii) princípio de
priorização e sintetização de prioridades; e (iv) análise de sensibilidade.
Em síntese, a estruturação do problema se inicia com a definição de um
objetivo global desejado. A partir desta, são definidos os critérios e, dependendo da
complexidade do problema, sub-critérios, até a extremidade da estrutura onde são
relacionadas as alternativas mais possíveis e prováveis. Para cada grupo, formado
por critérios e sub-critérios identificados, é utilizada uma matriz de comparações
paritárias, onde são obtidos os níveis de preferência por comparação. Ao final
do processo de estruturação do modelo, espera-se identificar a alternativa mais
adequada para o objetivo global, definido no inicio do processo, através de uma
posição hierárquica. A construção da árvore hierárquica pode ser feita do objetivo
para as alternativas ou no sentido inverso, isto é, das alternativas para o objetivo. A
opção por um ou por outro procedimento fica a critério dos decisores, que poderão
escolher uma ou outra forma de acordo com os conhecimentos de que dispõem
sobre o problema.
Além do resultado obtido, o método fornece uma medida de inconsistência
que é útil para se identificar possíveis erros nos julgamentos. Dificilmente se obtém
uma consistência perfeita em um modelo, mas também é importante entender as
reais causas de uma inconsistência, que podem variar desde a falta de informação
até um simples esquecimento durante a modelagem do problema. No geral, a taxa
de inconsistência tem que ser menor do que 10%
4. Procedimento Proposto
A elaboração do procedimento proposto foi realizada em duas etapas,
conforme é apresentado na Figura 2.
A primeira etapa se resume na coleta e identificação dos elementos essenciais
para a elaboração do procedimento. A coleta de dados foi feita com auxilio de
um questionário, construído a partir dos objetivos básicos da municipalização do
trânsito, extraídos do CTB e das recomendações do DENATRAN. Procurou-se,
através deste instrumento de pesquisa, levantar todos os elementos significativos
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
153
1a Etapa
necessários para a elaboração do procedimento proposto, tais como as atividades
efetivamente executadas e os principais resultados alcançados pelo órgão gestor com
a municipalização do trânsito. O questionário permitiu, também, obter informações
que refletissem o porte do município e do órgão em questão.
Coleta e identificação dos
elementos fundamentais ao
desenvolvimento do
procedimento proposto
Elaboração do questionário
Coleta dos dados
Análise dos dados
Procedimento
Proposto
2a Etapa
Expert Choice
Tratamento preliminar dos dados
Relação das atividades com os resultados alcançados
Hierarquização dos resultados alcançados
Relação dos resultados com as possíveis alternativas
Análise do resultado final produzido
Figura 2: Etapas para o desenvolvimento do procedimento proposto
Após a finalização do questionário, que foi testado e devidamente ajustado,
o instrumento foi enviado para 153 prefeituras onde o trânsito já se encontrava
municipalizado. Este número foi alcançado com o auxilio do DENATRAN, que
forneceu o cadastro de algumas prefeituras, e através da busca de contatos de órgãos
de trânsito municipais na Internet. Dos questionários enviados, que abrangeu as 5
(cinco) regiões do país, foram retornados apenas 6 (seis): Anápolis/GO, Araraquara/
SP, Campina Grande/PB, Campinas/SP, Palmas/TO e Valparaizo de Goiás/GO.
Esse baixo índice de respostas, apesar de não permitir a realização de qualquer
generalização dos resultados obtidos, viabilizou a montagem do banco de dados
necessário ao desenvolvimento do procedimento.
A segunda etapa da metodologia consiste na definição e sistematização das
atividades para a execução de um método de avaliação multicriterial aplicado
à análise da gestão municipal do trânsito, o que efetivamente se constitui no
procedimento proposto. Para tanto foi usada uma ferramenta computacional de
154
Transporte em Transformação XI
análise multicritério, o software Expert Choice 2000, 2aedição. Com o uso dessa
ferramenta, o procedimento proposto é estruturado em 05(cinco) passos, como
segue:
a) tratamento preliminar dos dados: visa identificar, para o município a
ser analisado, as atividades básicas efetuadas, as fontes de custos e
receitas decorrentes dessas atividades, e os resultados alcançados;
b) relação das atividades básicas executadas com as principais fontes de
custos e receitas, e com os resultados alcançados pelos órgãos gestores
do trânsito: busca identificar quais atividades executadas pelo órgão
de trânsito se relacionam diretamente com os resultados alcançados
pela gestão municipal;
c) hierarquização dos resultados alcançados pelos órgãos de trânsito:
nesse passo os resultados alcançados pelo órgão gestor do trânsito
(quesitos) são hierarquizados por pesos, visando identificar a
importância de um resultado sobre o outro;
d) relação dos resultados alcançados pelo órgão de trânsito (quesitos)
com as possíveis alternativas relacionadas no procedimento: neste
passo são priorizados os quesitos hierarquizados com relação a cada
alternativa relacionada no procedimento proposto, neste caso “Gestão
Eficaz” e “Gestão não Eficaz”, visando sintetizar a análise final do
órgão de trânsito;
e) análise do resultado final produzido pelo procedimento proposto: o
último passo do procedimento se resume na análise de sensibilidade
do resultado final, que é apresentado após o passo anterior de forma
resumida e detalhada pelos quesitos hierarquizados.
Com base na análise do banco de dados gerado, foi identificada a relação de
qual atividade geraria, de forma direta, um custo e/ou uma receita para o órgão de
Trânsito, e o embasamento legal para a execução da atividade, perfazendo um total
de 29 atividades (ver França, 2004). Destaca-se que esta relação pode ser alterada
em função da necessidade de um órgão gestor específico ou do próprio DENATRAN.
Posteriormente, foram identificados os seguintes quesitos para avaliação do órgão
de trânsito para efeito do procedimento sugerido neste trabalho: (1) redução de
acidentes com mortes; (2) redução de acidentes com feridos; (3) redução dos
acidentes em geral; (4) lucro financeiro da atividade; (5) melhoria da qualidade de
circulação; (6) aprovação da comunidade; (7) possibilidade de profissionalização;
e (8) diminuição da poluição. Estes quesitos também podem ser modificados em
função da necessidade de uma aplicação específica.
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
155
Para conseguir a relação proposta no passo (b) do procedimento, foi
necessário associar cada atividade detectada com os resultados alcançados, de
forma que essa relação produzisse um só padrão de informação. Para se conseguir
esta uniformização foram usadas várias técnicas de relacionamentos, de forma que
o produto das operações só gerasse 3 (três) valores possíveis: 0 (zero), 5 (cinco) e
10 (dez). Esse passo foi necessário para permitir a alimentação do software com
dados adequados.
O próximo passo para a elaboração do procedimento foi a hierarquização por
pesos dos resultados alcançados, conforme indicado no passo (c). No desenvolvimento
desta etapa contou-se com a ajuda de três especialistas que hierarquizaram os 8 (oito)
resultados, que refletem os quesitos de avaliação, par a par, pela importância de
um sobre o outro. O resultado dessa hierarquização foi uma matriz de comparação
paritária (ver Figura 3). Com a matriz aprovada, o software gerou os resultados
das comparações entre os pares de forma hierárquica, possibilitando a visualização
do impacto de cada resultado sobre o conjunto trabalhado. Estes resultados são
apresentados como parte do modelo de análise da eficácia da gestão de um órgão de
trânsito, mostrado na Figura 4.
Partindo da hierarquização dos resultados alcançados chega-se ao passo (d),
de priorização e sintetização dos elementos do sistema. Neste passo é determinada
a importância de cada resultado alcançado pelo órgão de trânsito em relação às
possíveis alternativas relacionadas para o modelo proposto. As alternativas a serem
incluídas são duas: Gestão Eficaz e Gestão não Eficaz. A alimentação do modelo
proposto é feita de forma individual por município. Cada resultado alcançado é
relacionado às alternativas possíveis, adotando que: quando um quesito de avaliação
for 0 (zero), corresponderá a medida 5 (cinco) a direita, próximo da palavra “Gestão
não Eficaz”; quando o quesito for 5 (cinco), corresponderá a medida 1(um) do
software; e quando o quesito for 10, corresponderá a medida 5 (cinco), próximo
da palavra “Gestão Eficaz”. Desta forma cada quesito de avaliação terá 50% de
chances de ser enquadrado como eficaz ou não eficaz.
156
Transporte em Transformação XI
Índice de Inconsistência
Figura 3: Matriz de comparação paritária sobre os resultados alcançados
A Figura 4 traz o modelo já montado, pronto para ser alimentado com os dados
dos resultados da gestão de um órgão de trânsito, e a Figura 5 traz um exemplo de
alimentação de dados no software.
Figura 4: Modelo de análise da eficácia da gestão de um órgão de trânsito
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
157
Avaliação
Barras representando o peso relativo de cada alternativa dentro do modelo criado
Figura 5: Exemplo de alimentação do modelo proposto
O resultado final produzido pelo procedimento proposto é fornecido após a
inclusão de todos os dados no sistema. O software disponibiliza uma janela com as
pontuações finais para cada alternativa, podendo essa avaliação ser apresentada de
duas formas:
1. Resumida – é apresentado um gráfico de barras que representa as
prioridades de cada alternativa em relação ao objetivo final; e
2. Detalhada – é apresentada uma tabela com as prioridades das alternativas
para cada resultado avaliado, numa escala de 0 (zero) a 1 (um) onde a
soma das importâncias atribuídas a todas as alternativas analisadas é igual
a 1,00.
Se a gestão do órgão de trânsito, como um todo, obtiver uma avaliação igual
ou superior a um valor limite a ser arbitrado pelo usuário do sistema, como o valor
mínimo de avaliação adotado como aceitável, a gestão do órgão será considerada
eficaz. Caso contrário, mesmo obtendo uma avaliação como “eficaz” maior que a
“não eficaz”, a gestão será considerada INEFICAZ. Para o procedimento proposto,
será arbitrado 0,700 como o valor mínimo aceitável para a classificação da gestão
do órgão de trânsito como eficaz.
O software usado traz, ainda, a possibilidade do órgão de trânsito analisar sua
avaliação, resultado por resultado, permitindo que o mesmo encontre os problemas
que levaram ao resultado final.
158
Transporte em Transformação XI
O último passo do método, análise de sensibilidade, é usado para determinar
como as mudanças nos pesos dos resultados alcançados afetam nos valores das
alternativas. O software Expert Choice 2000 possibilita que esta análise seja feita
através de gráficos, permitindo, também, que um ou outro resultado seja excluído
para complementar uma análise mais detalhada. Além disso, o usuário pode simular
outros valores no modelo trabalhado, buscando encontrar uma melhor estratégia de
ação.
5. Exemplo de Resultados do Procedimento Proposto
A título de mostrar os resultados produzidos pelo procedimento ao ser aplicado
a um determinado município, foi considerado um município hipotético que se
integrou ao SNT no ano 2000, e a análise do órgão de trânsito deste município é feita
com base nos dados de 2002 (ano da análise). Os dados iniciais disponibilizados
para a análise, bem como o tratamento que estes sofreram para serem introduzidos
no software, são detalhados em França (2004).
Nesta seção são mostradas apenas as janelas de saída do programa relativas aos dois
tipos de resultados produzidos: resultado resumido (Figura 6) e resultado detalhado
(Figura 7).
Resultado Final Resumido
Figura 6: Exemplo de um resultado final – Resumido
O exemplo hipotético apresentado obteve uma avaliação de 0,765, superior
ao valor mínimo arbitrado no procedimento proposto. Assim, sua gestão do trânsito
é avaliada como EFICAZ.
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
159
Resultado Final Detalhado por Quesito Avaliado
Figura 7: Exemplo de um resultado final – Detalhado
6. Avaliação do Procedimento Proposto
O procedimento elaborado foi aplicado nos seis municípios que participaram
do trabalho. Posteriormente, foi solicitado aos municípios que avaliassem a eficácia
de sua gestão através da atribuição de uma nota no intervalo de 0 (zero) a 1 (um),
inclusive, onde zero significava gestão totalmente ineficaz, e 1 (um) gestão totalmente
eficaz. A escala adotada visou permitir a comparação direta entre a avaliação dos
órgãos de trânsito e o valor gerado pelo procedimento.
Somente 03 (três) municípios encaminharam a avaliação solicitada, e os
resultados obtidos, tanto os solicitados quanto os gerados pelo procedimento, estão
apresentados na Tabela 3.
160
Transporte em Transformação XI
Tabela 3 - Comparação dos resultados
Município
Município 1
Município 2
Município 3
Município 4
Município 5
Município 6
Avaliação da eficácia gerada pelo
procedimento proposto
0,793
0,270
0,796
0,760
0,825
0,813
Avaliação da eficácia feita pelo órgão
de trânsito do município
0,800
0,500
Não respondeu
0,800
Não respondeu
Não respondeu
Os resultados mostram que nos dois municípios onde a avaliação resultante
do uso do procedimento proposto foi positiva (EFICAZ), ela foi bem compatível
com a avaliação realizada pelos técnicos que acompanham, no dia a dia, o processo
da municipalização do trânsito. No município onde a discrepância foi elevada
chama a atenção o fato da avaliação do órgão ser bem superior à produzida pelo
procedimento.
7. Conclusões
O objetivo proposto neste trabalho, que foi desenvolver um procedimento que
permitisse a avaliação da eficácia da gestão do trânsito realizada em nível municipal,
foi plenamente alcançado. A técnica de multicritério associada ao modelo proposto
permitiu a análise dos resultados operacionais alcançados com a municipalização do
trânsito, tanto de forma geral quanto de forma detalhada por resultado operacional
(quesito) incluído nessa análise.
O software Expert Choice 2000, utilizado na pesquisa, apresentou uma
operacionalidade bem simples, gerando o resultado final desejado logo após a
alimentação dos dados necessários para o modelo estruturado. A operacionalização
do procedimento criado é bastante flexível, permitindo que novos quesitos, subquesitos, e formas diferenciadas de avaliação da importância relativa dos mesmos
sejam incorporados ou excluídos do processo de análise hierárquica para alcançar
uma melhor análise dos resultados. Esta flexibilidade do modelo proporciona
a representação de propósitos diferenciados de órgãos gestores do trânsito que
possuem características distintas, contribuindo para uma análise mais completa e
eficiente.
Avaliação da Eficácia da Gestão do Trânsito em Nível Municipal
161
O procedimento poderá ser aplicável a órgãos gestores de trânsito dos
municípios brasileiros, desde que os quesitos de avaliação e os pesos relativos desses
quesitos sejam estabelecidos de forma a refletir a característica de cada órgão e os
seus principais objetivos no processo de municipalização do trânsito.
O acompanhamento dos dados relacionados a cada atividade (custos, receitas,
forma como é realizada e resultados) ao longo do tempo, poderá proporcionar ao
município a análise de impactos decorrentes de alterações na forma de gestão do
órgão de trânsito sobre essas atividades.
162
Transporte em Transformação XI
Referências Bibliográficas
BAASC, Sandra Sulamita Nahas (1995). Um Sistema de Suporte Multicritério
Aplicado na Gestão dos Resíduos Sólidos nos Municípios Catarinenses. Tese
de Doutorado em Engenharia de Produção, Universidade Federal de Santa Catarina. Florianópolis.
BRASIL (1988). Constituição da República Federativa do Brasil. Senado, Brasília,
DF.
BRASIL (1997). CTB - Código de Trânsito Brasileiro. Disponível em <http://www.
denatran.gov.br/ctb.htm> acesso em 28 de junho de 2007.
DENATRAN - Departamento Nacional de Trânsito. Brasília (2007). Disponível em
<http://www.denatran.gov.br/municipios/orgaosmunicipais.htm> acesso em 28
de junho de 2007.
ENSSLIN, Leonardo; MONTIBELLES, Gilberto N. e NORONHA, Sandro MacDonald (2001) APOIO A DECISÃO: Metodologias para estruturação de Problemas e Avaliação Multicritério de Alternativas. São Paulo, SP: Editora Insular.
FRANÇA, Luis Cláudio R. (2004). Procedimento para Análise da Eficácia da Gestão dos Órgãos de Trânsito dos Municípios Brasileiros. Dissertação de Mestrado em Transportes, Universidade Federal de Brasília. Brasília/DF.
LUCENA, Luciana F.L. (1999) A Análise Multicriterial na Avaliação de Impactos
Ambientais. III Encontro ECO - Instrumentos Econômicos e Políticas Públicas
para a Gestão Ambiental. Recife, PE.
MELLO, João C. C. B. S.;GOMES, E. G.; NETO, L. B. e GOMES, L. F. A . M.
(2002). Avaliação Multicritério das Opções de Ligação Aérea Rio – São Paulo.
Rio de Janeiro – RJ: ANPET – Associação Nacional de Pesquisa em Transportes.
VASCONCELOS, Eduardo A. (1999). Circular é Preciso, Viver não é Preciso. São
Paulo – SP: Editora ANNABLUME.
Luis Cláudio Rodrigues de França ([email protected])
Maria Alice Prudêncio Jacques ([email protected])
Seleção de Rota
Marítima de Contêineres
8
Marcio Arzua Caillaux
Annibal Parracho Sant’anna
Lidia Angulo Meza
João Carlos Correia Baptista Soares de Mello
Universidade Federal Fluminense
Escola de Engenharia
Resumo
Este trabalho tem por objetivo a escolha da rota marítima mais adequada
para um contêiner entre dois portos. Possíveis rotas do contêiner são analisadas
utilizando-se a Análise Envoltória de Dados (DEA), a composição de probabilidades
de otimizar e o método de Copeland. As variáveis consideradas são tempo de
transporte, produtividade e custos dos terminais portuários, tais como: armazenagem
do contêiner e custo da operação de transbordo. São usados dados reais de uma
empresa brasileira de transporte marítimo que possui rotas de navios fixas e regulares
entre os portos da costa leste da América do Sul.
164
Transporte em Transformação XI
Abstract
This paper aims the selection of the most suitable maritime route for a container
between two ports. Possible routes are analyzed by means of Data Envelopment
Analysis (DEA), the probabilistic composition of optimizing and the Copeland
method. The variables taken into account are time of transportation, productivity and
cost of the port terminals, such as: container storage and operational transshipment
cost. The analysis employs data of a Brazilian shipping company which has vessels
in fixed and regular routes along South America east cost.
1. Introdução
O objetivo desse trabalho é apoiar o transportador marítimo na tomada de
decisão, definindo a rota mais vantajosa, em forma de ordenação, para um contêiner
entre a origem e destino solicitados pelo cliente. Os resultados são obtidos através da
DEA, do método multicritério ordinal de Copeland e da comparação probabilística
de probabilidades de atingir a fronteira assumindo-se as observações como sujeitas
a erros com distribuição de Pareto.
O presente trabalho usa dados de uma empresa que atua há mais de 50 anos na
prestação de serviços de transporte marítimo entre diversos portos do mundo. Atualmente,
o serviço foco da empresa é o que envolve os portos da costa leste da América do Sul.
Neste serviço, são treze navios distribuídos em três rotas fixas e regulares.
Em diversos casos, uma única rota de navios não escala diretamente a origem
e destino solicitado pelo cliente ao transportador marítimo. Esta impossibilidade
de conexão direta é conseqüência da configuração do serviço, onde nenhuma das
três rotas existentes escala diretamente todos os onze portos. Neste caso, haverá
a necessidade de trasbordar a carga de uma rota de navios para outra, em algum
porto determinado. Também há casos em que o tempo em trânsito da carga pode ser
menor caso o contêiner seja transbordado de uma rota de navios para outra, em algum
momento da operação, ao invés de seguir diretamente através de uma única rota.
No serviço em estudo, existem diferentes caminhos que um contêiner pode
percorrer entre uma determinada origem e destino. O transportador marítimo nem
Seleção de Rota Marítima de Contêineres
165
sempre escolhe a melhor alternativa disponível por falta de um instrumento que
compare todas as opções e aponte a mais vantajosa.
A seguir, faz-se a apresentação das três técnicas utilizadas para a apuração e
ordenação das rotas mais vantajosas. Na seção 3, são apresentadas algumas aplicações
de uma das metodologias utilizadas na área de transportes. Na seção 4, passa-se à
descrição do caso de estudo. Na seção 5, a metodologia desenvolvida para a escolha
e ordenação das rotas são descritas, em suas linhas gerais. Adicionalmente, algumas
comparações das técnicas utilizadas nessa ordenação são realizadas. Finalmente, na
seção 6, apresentam-se as conclusões deste trabalho.
2. Técnicas Utilizadas
A fim de apurar, conhecer e finalmente selecionar a rota mais adequada
entre duas localidades, foram utilizadas três técnicas. A Análise Envoltória de
Dados (DEA) pode ser vista como um método de composição de critérios com a
importância atribuída a cada critério variando de acordo com a posição relativa.
Um método clássico de composição de critérios com esta característica é o método
ordinal de Copeland (que pode ser considerado um meio termo entre os métodos
de Borda e Condorcet). Uma outra abordagem com a mesma característica é a
composição de probabilidades de atingir a fronteira desenvolvida em Sant’Anna
(2002). Este último tem em comum com a DEA a característica de atribuir maior
importância às distâncias entre as unidades comparadas que, de alguma forma,
possam ser consideradas mais próximas de uma fronteira de referência.
A DEA considera as variáveis na escala em que foram naturalmente medidas.
No método de Copeland, consideram-se apenas os postos segundo cada critério,
mais especificamente, a relação entre os postos de cada par de alternativas. Na
composição probabilística, a proximidade da fronteira é medida em termos de
probabilidades de cada opção atingir a fronteira.
Outra diferença importante entre a DEA, o método de Copeland e a composição
probabilística é que, nestas duas últimas abordagens, a medida de preferência
atribuída a cada opção segundo cada critério depende da sua posição relativa a
todas as outras opções, e não apenas àquelas na fronteira.
166
Transporte em Transformação XI
2.1. DEA
A história da Análise Envoltória de Dados começa com a tese para obtenção
de grau Ph.D. de Edward Rhodes sob a supervisão de W.W. Cooper, publicada em
1978 (Charnes et al., 1978). O objetivo da tese foi desenvolver um modelo para
estimar a eficiência técnica sem recorrer ao arbítrio de pesos para cada variável
de input ou output, e sem converter todas as variáveis em valores econômicos
comparáveis.
Em contraste com as aproximações paramétricas, cujo objetivo é determinar
um hiperplano de regressão ótimo, DEA otimiza cada observação individual com o
objetivo de calcular uma fronteira de eficiência.
A eficiência 100% é atingida por uma unidade quando comparações com as
outras unidades não provem evidência de ineficiência no uso de qualquer input ou
output. Este conceito permite diferenciar entre estados de produção eficientes e
ineficientes. Descrevem-se a seguir dois modelos DEA clássicos: o modelo CRS
(ou CCR) e o VRS (ou BCC).
O modelo CCR determina uma fronteira CRS (Constant Returns to Scale)
que indica que crescimentos proporcionais dos inputs produzirão crescimentos
proporcionais dos outputs. O modelo VRS (Variable Returns to Scale) diferenciase do modelo CRS por considerar a possibilidade de rendimentos crescentes ou
decrescentes de escala na fronteira eficiente.
Modelos com orientação ao input indicam que se deseja minimizar a utilização
de recursos tal que o nível dos outputs não se reduza. Modelos com orientação ao
output indicam que o objetivo é maximizar os produtos obtidos sem alterar o nível
atual dos inputs.
DMUs são as unidades tomadoras de decisão (Decision Making Units) e,
geralmente, são representadas pelas empresas, setores ou instituições a serem
avaliadas. Estas devem ser homogêneas, ou seja, atuam no mesmo tipo de negócio,
realizam as mesmas tarefas com os mesmos objetivos e estão trabalhando nas
mesmas condições de mercado. As variáveis utilizadas para cada DMU devem ser
iguais.
ar os produtos obtidos sem alterar o nível atual dos inputs.
tomadoras de decisão (Decision Making Units) e, geralmente, são
presas,
setores
ou instituições
a serem
avaliadas.
devem são
ser
tomadoras
de decisão
(Decision
Making
Units)Units)
e, Estas
geralmente,
dades
tomadoras
de decisão
(Decision
Making
e, geralmente,
são
uam
nosetores
mesmoou
tipo de negócio,
as mesmas
tarefas
comser
os
a realizam
serem
avaliadas.
Estas
devem
sresas,
empresas,
setoresinstituições
ou instituições
a serem
avaliadas.
Estas
devem
ser
Seleção
Rota Marítima
de Contêineres
ão trabalhando
nas demesmas
condições
de
mercado.
As devariáveis
167
uam
no
mesmo
tipo
negócio,
realizam
as
mesmas
tarefas
com
os
ja, atuam no mesmo tipo de negócio, realizam as mesmas tarefas com os
U
devem
ser iguais.
ão
trabalhando
nas mesmas
condições
de mercado.
As variáveis
e estão
trabalhando
nas mesmas
condições
de mercado.
As variáveis
U
devem
ser
iguais.
a DMU devem ser iguais.
emática, considera-se
cada DMU
k , k = 1,considera-se
..., n, é umaque
unidade
Em suaque
formulação
matemática,
cada DMU k , k = 1, ..., n, é
nmática,
inputsconsidera-se
xik,
iunidade
=1, …,que
r, produção
para
produzir
m
outputs
yjk,
j
=1,
…,
s. Opara produzir m outputs
uma
de
que
utiliza
n
inputs
xik,
i
=1,
…,
k , k =k 1,
o matemática, considera-secada
que DMU
cada DMU
, k...,
= n,
1, é...,uma
n, éunidade
uma r,unidade
o
quociente
entre
a
combinação
linear
dos
outputs
e
a
combinação
yjk, ij xik,
s.r, O
modelo
o quociente
linear dos
ntiliza
inputs
xik,
=1, …,
para
mmaximiza
outputs
yjk,
j yjk,
=1, …,
s. …,
Oa combinação
n inputs
i =1,
…,
r,produzir
paraCCR
produzir
m outputs
j entre
=1,
s. O
restrição
de
que,
para
qualquer
DMU,
esse
quociente
não
pode
ser
omiza
quociente
entree aentre
combinação
lineardos
dos
outputs
eaarestrição
combinação
outputs
combinação
linear
inputs,
de que, para qualquer DMU,
o quociente
a combinação
linear
doscom
outputs
e a combinação
arestrição
uma DMU
o,
ho para
é a eficiência;
xiomaior
e yjo
são
osAssim,
inputsnão
e outputs
da o, ho é a eficiência;
de
que,
qualquer
DMU,
esse
quociente
pode
esse
quociente
não
pode
ser
que
1.
para
uma
DMU
com a restrição de que, para qualquer DMU, esse quociente não ser
pode
ser
sos calculados
pelo
para
inputs
e outputs,
respectivamente.
Acalculados pelo modelo
o,
ho são
éo,modelo
aho
eficiência;
xio e yjo
são
oso;
inputs
esão
outputs
da
xioDMU
e yjo
os
inputs
e outputs
da
DMU
vi os
e ujinputs
osepesos
m,uma
paraDMU
uma
é a eficiência;
xio
e yjo
são
outputs
da
delo
CCR:para inputs
sos
calculados
pelo
modelo
para
inputs
e
outputs,
respectivamente.
A
e
outputs,
respectivamente.
A
seguir,
encontra-se
o
modelo
os pesos calculados pelo modelo para inputs e outputs, respectivamente. A CCR:
delo
CCR: CCR:
o modelo
Maximizar
s
¦u y
∑
h = ¦ u y¦ u y
h = ∑
¦
h v= x
¦v x¦v x
j jojo
s
s
j =1
r j jo
j =1
j =1
r o i ioio
r
i =1
i io
i =1
i =1
o
o
s
j
jo
i io
Sujeito a
¦u y
¦ u y¦
u≤ y1, k = 1,..., n
∑
¦ v x ≤ 1, k≤=1,1,...,k =n 1,..., n
vx vx
¦
∑0 ∀i, j
u , v ≥¦
j
s
j =1
r j
j =1
i
r
i =1
i
i =1j
i
jk
ss
jk
jj=11
ik
rr
ik
ii=11
jj
(1)
(1)
(1)
(1)
jk
jk
ii ik
ik
u j , vi ≥u 0, v ∀≥i,0j ∀i, j
jj ii
os matemáticos, esse modelo pode ser linearizado, transformando-se
gramação
Linear esse
(PPL)
apresentado
a seguir:
s matemáticos,
modelo
pode
ser
linearizado,
transformando-se
Mediante
artifícios
matemáticos,
esse
modelo pode ser linearizado,
rtifícios
matemáticos,
essealguns
modelo
pode
ser
linearizado,
transformando-se
ramação
Linear
(PPL)
apresentado
a
seguir:
e Programação
Linear (PPL)
seguir:
transformando-se
emapresentado
um Problemaade
Programação Linear (PPL) apresentado a seguir:
s
Maximizar
ho = ¦
u j y jo
ss
s
j =1
hoo = ¦
∑hou=jj y¦
jo u y
jo
j jo
jj =1
j =1
Sujeito a
rr
∑ vv xx
¦
=11
ii =
ss
io
ii io
∑ uu
¦
=11
jj =
(2)
(2)
(2)
=1
rr
jj
yy jkjk − ¦
∑ vvii xxikik ≤ 0 , kk = 1,..., nn
=11
ii =
uu jj , vvii ≥ 0 ∀ii, jj
odelos DEA tenham a vantagem de permitir fazer ordenações sem depender de
decisores, são extremamente benevolentes com as unidades avaliadas. Estas
cientes ao considerar apenas algumas das variáveis, a saber, aquelas que lhes são
(2)
168
Transporte em Transformação XI
Embora os modelos DEA tenham a vantagem de permitir fazer ordenações
sem depender de opiniões de decisores, são extremamente benevolentes com as
unidades avaliadas. Estas podem ser eficientes ao considerar apenas algumas das
variáveis, a saber, aquelas que lhes são mais favoráveis. Uma interpretação não
matemática desse fato pode ser encontrada em Novaes (2001). Essa característica
de benevolência dos modelos DEA faz com que ocorram empates para as unidades
100% eficientes, o que provoca uma baixa discriminação entre as DMUs.
2.2. Método de Copeland
Segundo Arrow (1951), citado por Barba-Romero e Pomerol (1997), não
existe escolha justa, ou seja, não existe método multicritério, ou multidecisor
“perfeito”. Considera-se como justo um método de escolha multidecisor que
obedeça aos axiomas de universalidade, da unanimidade, da independência em
relação às alternativas irrelevantes, da transitividade e da totalidade. O teorema de
Arrow garante que, com exceção de métodos de ditador, nenhum método de escolha
atende simultaneamente a esses axiomas.
No método de Copeland a avaliação de uma opção qualquer é dada pela
diferença entre o número de opções que ela sobrepuja e o número de opções que a
ela são preferíveis, não importando quantas opções sejam consideradas equivalentes
a ela.
A diferença entre o método de Copeland e o método de Borda surge apenas
quando há empates. A diferença entre o método de Copeland e o método de Condorcet
surge apenas quando há ciclos de intransitividade. Para um aprofundamento da
discussão sobre os métodos ordinais, recomenda-se Dias et al. (1996).
2.3. Composição Probabilística
Na composição probabilística, com o reconhecimento da presença de erros de
medida aleatórios, os volumes de entradas e saídas observados passam a ser tratados
como estimativas de parâmetros de posição de distribuições de probabilidades.
Derivam-se, também, do conjunto de valores observados, estimativas para outros
parâmetros dessas distribuições.
Segundo Sant’Anna (2002), a avaliação probabilística tende a atribuir menos
medidas de eficiência elevadas às unidades de dimensão muito pequena ou muito
Seleção de Rota Marítima de Contêineres
169
grande em relação ao conjunto analisado. Unidades com valores extremos terão
suas medidas de eficiência calculadas através do produto de probabilidades muito
próximas de zero por probabilidades muito próximas de 1, enquanto as unidades
com valores mais próximos da mediana terão suas medidas de eficiência calculadas
através do produto de fatores mais homogêneos.
A abordagem probabilística, de um lado, eleva fortemente a medida de
eficiência de qualquer unidade de produção sempre que apresente desempenho
extremo seja na minimização do volume de algum recurso seja na maximização
do volume de algum produto, mas, de outro lado, ameniza a influência desses
pontos extremos, levando em conta o desempenho de mais variáveis e de mais
unidades de observação. Enquanto a fronteira de excelência tende a ser formada
por desempenhos raros, a comparação em variáveis em que a unidade não apresente
desempenho extremo e a comparação com um conjunto de observações com valores
mais freqüentes torna o procedimento de avaliação resistente a erros aleatórios.
É difícil dispor de informação a priori sobre a forma da distribuição das
perturbações aleatórias e, nas primeiras aplicações, não é comum dispor de um
número de observações, em cada unidade, suficiente para, mesmo assumindo
as habituais hipóteses de normalidade e independência, estimar, com precisão
satisfatória, seus parâmetros de dispersão. Neste trabalho se assumem distribuições
de Pareto. È interessante notar que, embora as variáveis assumam valores inteiros
e positivos, é recomendável o uso de uma aproximação contínua para suavizar as
avaliações das probabilidades de maximizar. A influência dos empates no caso de se
adotar uma distribuição discreta é exemplificada em Sant’Anna (2005).
Diferentes medidas podem ser construídas a partir da composição das
probabilidades de atingir as fronteiras em cada variável, conforme utilizemos os
conectivos “e” ou “ou” e conforme tomemos a fronteira inferior ou a fronteira superior
como referência. O uso de formas diferentes de exigir que se atinja simultaneamente
a maximização de saídas e a minimização de entradas permite avaliar os efeitos de
pequenas diferenças. Uma classificação de pontos de vista em dois eixos subjetivos
facilita a identificação dessas diferenças. Esses eixos são um eixo pessimista-otimista
e um eixo conservador-progressista. Uma composição é otimista quando considera
a probabilidade de atingir a fronteira de excelência (ou afastar-se da fronteira de
pior desempenho) em pelo menos uma variável. E pessimista quando se baseia
na exigência de aproximação da fronteira conjuntamente, em todas as variáveis.
Diferentes medidas podem ser construídas a partir da composição
atingir as fronteiras em cada variável, conforme utilizemos os cone
conforme tomemos a fronteira inferior ou a fronteira superior como
formas diferentes
de exigir que se atinja simultaneamente a maxim
XI
170 Transporte em Transformação
minimização de entradas permite avaliar os efeitos de pequenas diferen
de pontos de vista em dois eixos subjetivos facilita a identificação d
são um eixo
pessimista-otimista
e um como
eixo conservador-progressi
Por outro lado, umaeixos
composição
é progressista
quando toma
referência a
otimista
quando considera
a probabilidade
de atingir
a fronteira
de ex
fronteira de excelência
e conservadora
quando toma
como referência
a fronteira
de
da
fronteira
de
pior
desempenho)
em
pelo
menos
uma
variável.
E
pessi
pior desempenho.
na exigência de aproximação da fronteira conjuntamente, em todas a
lado, uma
composição
é progressista
quando toma
referência a fr
Para cada alternativa
j0 e critério
i, sejam
Mj0j a probabilidade
de acomo
alternativa
conservadora
quando
toma
como
referência
a
fronteira
de
piore desempe
j0 apresentar, segundo o critério i-ésimo, avaliação maior que todas as outras
mj0i a probabilidade de tal alternativa apresentar avaliação menor ou igual a todas
Para cada alternativa j0 e critério i, sejam Mj0j a probabilidade de a al
segundo o mesmo critério.
segundo o critério i-ésimo, avaliação maior que todas as outras e mj0i
alternativa apresentar avaliação menor ou igual a todas segundo o mesm
Com esta notação, a avaliação probabilística conservadora e pessimista da
alternativa j par a produção
denotação,
um conjunto
de outputs
utilizando conservadora
um conjunto de
Com esta
a avaliação
probabilística
e pessimist
inputs será proporcional
ao
produto
∏s(1
–
mjs)*∏i(1
–
Mji),
para
produção de um conjunto de outputs utilizando∏s
umdenotando
conjunto de input
produtório com s variando
longo
de todas –asMji),
saídas
∏i denotando
produtório produtório
com i
produto ao
s(1
– mjs)*i(1
parae s
com
variando ao longo de
todas
entradas.
Para facilitar
a comparação,
resultado
todas
as as
saídas
e i produtório
com
i variando ao olongo
de todas as en
desta operação é padronizado,
dividindo
por uma
que avaliação
comparação,
o resultado
destaconstante
operaçãodeé modo
padronizado,
dividindo por u
da unidade de avaliação
alta seja
sempre de
igual
a 1. mais alta seja sempre igual a 1.
que mais
avaliação
da unidade
avaliação
Um método para
as variáveis
tenham
igual importância
Umassegurar
método que
paratodas
assegurar
que todas
as variáveis
tenham igual im
analisado
é calcular
a probabilidade
de uma alternativa
ser a preferida
no contexto analisado
é calcular
a probabilidade
de uma alternativa
ser a preferida
critérios
Matematicamente, esta
esta
composição é
em pelo menos um dos
critériosconsiderados.
considerados. Matematicamente,
composição
1 − [∏ kk ==1p (1 − M i ,k ) × ∏ jj ==1n (1 − mi , j )])]
.
é dada pelo produto
No modelo
DEA,
fato de produzir
uma unidade
produzir
em grande quant
No modelo DEA,
o fato de
umao unidade
em grande
quantidade
output
ou
utilizar
pequena
quantidade
de
determinado
input fará c
um determinado output ou utilizar pequena quantidade de determinado input
aproxime
da fronteira
de eficiência.
A probabilidade
de a unidade max
fará com que a mesma
se aproxime
da fronteira
de eficiência.
A probabilidade
output
e
minimizar
pelo
menos
um
input
corresponde
a esta
de a unidade maximizar pelo menos um output e minimizar pelo menos
um abordage
input corresponde a esta abordagem. Essa composição é descrita pelo produto
)] ×[1 − ∏ jj ==1n (1 − mi , j )]
)]
[1 − ∏ kk ==1p (1 − M i ,k )]
a visão
progressista
produto
, que
que nada
nadamais
maiséédodoque
que
a visão
e otimista,e otimista,
tanto paratanto
inputs
quanto
para
outputs.
para inputs quanto para outputs.
ho, a composição
probabilística
usada para
propiciar uma
Neste
trabalho, a será
composição
probabilística
serávisão
usadapessimista,
para propiciar uma
simultaneamente
minimização
das duassimultaneamente
variáveis consideradas,
custo das
e tempo.
visão pessimista,
exigindo-se
minimização
duas variáveis
entretanto,
a
ótica
progressista,
dando
maior
importância
as
diferenças
próximas
consideradas, custo e tempo. Manter-se-á, entretanto, a ótica progressista, dando
e melhor desempenho.
maior importância as diferenças próximas à fronteira de melhor desempenho.
M TRANSPORTES
transportes são encontrados estudos utilizando-se DEA nos diversos modais de
Novaes (2001) analisa a eficiência e ganhos de escala de 21 metrôs de diversas
mundo, além de analisar o benchmarking de metrôs não eficientes, com ênfase ao
o Paulo.
Seleção de Rota Marítima de Contêineres
171
3. DEA em Transportes
Na área de transportes são encontrados estudos utilizando-se DEA nos diversos
modais de transporte. Novaes (2001) analisa a eficiência e ganhos de escala de 21
metrôs de diversas cidades do mundo, além de analisar o benchmarking de metrôs
não eficientes, com ênfase ao metrô de São Paulo.
No setor aéreo, em Soares de Mello et al. (2003), é feito um estudo da
eficiência e dos benchmarks para as companhias aéreas brasileiras. Ainda no
transporte aéreo, estudos de eficiência que utilizam DEA e que consideram aspectos
financeiros são encontrados em Fernandes e Capobianco (2000). Um modelo com
aspectos financeiros e não financeiros é usado por Adler e Golany (2001). Para a
avaliação de desempenho de companhias aéreas ou aeroportos, outras abordagens
não financeiras são encontradas em, por exemplo, Charnes et al. (1996) e Fernandes
e Pacheco (2002). Essas abordagens têm em comum o fato de calcularem uma única
eficiência para cada DMU.
No setor marítimo, os primeiros estudos utilizando-se DEA foram realizados
no setor portuário por Roll e Hayuth (1993), que trabalharam com dados hipotéticos
e demonstraram como suas eficiências poderiam ser mensuradas. Alguns outros
poucos trabalhos nesta linha foram publicados, como, por exemplo, MartinezBudría et al. (1999), que analisaram vinte e seis portos espanhóis no período de
1993 a 1997, em um total de 130 observações, utilizando três inputs (despesas
com pessoal, taxas de depreciação e outros gastos) e dois outputs (total de carga
movimentada e receita obtida no aluguel de facilidades). Tongzon (2001), com 16
terminais de diferentes países, utilizou um output (TEUs) e seis inputs (número de
guindastes, número de berços, número de rebocadores, número de funcionários, área
do terminal e tempo de espera) para realizar uma análise de suas eficiências. Itoh
(2002) analisou a eficiência operacional dos oito maiores terminais de contêineres
do Japão, utilizando como número de TEUs movimentados por ano e os inputs
foram divididos em 3 categorias: infra-estrutura (área do terminal e número de
berços), superestrutura (número de guindastes) e número de trabalhadores. Turner et
al. (2004) mediram a eficiência de 26 terminais de contêineres dos Estados Unidos
e Canadá entre 1984 a 1997. Os inputs escolhidos foram a área do terminal, número
de guindastes e tamanho do berço. O output considerado foi o número de TEUs
movimentados.
172
Transporte em Transformação XI
4. Modelagem
No serviço de cabotagem e Mercosul, oferecido pela empresa estudada, onze
portos são escalados por treze navios, distribuídos em três rotas fixas e regulares (I,
II e III), ao longo da costa leste da América do Sul, a saber: Manaus (AM), Vila do
Conde (PA), Fortaleza (CE), Suape (PE), Salvador (BA), Vitória (ES), Sepetiba (RJ),
Santos (SP), Rio Grande (RS), Montevidéu (Uruguai) e Buenos Aires (Argentina).
Existem, nesse serviço, 110 possíveis combinações origem-destino (nos
sentidos norte e sul) oferecidas ao cliente pela empresa transportadora. Esta, dispondo
de suas três rotas de navios, deve definir o trajeto que o contêiner percorrerá entre a
origem e destino solicitados pelo cliente.
O presente trabalho limita-se a apenas 3 das 110 opções origem-destino, entre
os portos da costa leste da América do Sul, oferecidas pela referida empresa. As
opções em estudo são: Montevidéu – Suape, Fortaleza – Rio Grande e Rio Grande –
Fortaleza. A escolha desses pares de portos foi com base nos significativos volumes
dos mesmos e, ao mesmo tempo, na sua importância no que se refere às suas
localizações. Além disso, verifica-se, nos últimos anos, uma crescente evolução
relacionada ao volume de carga transportada entre essas localidades. Pela estrutura
do serviço em questão, existe a possibilidade, nos três casos, de transportar a carga
diretamente (através de um único navio) ou por meio de transbordo (fazendo a
conexão para outro navio).
As opções a serem comparadas (DMUs, na terminologia da DEA) são
representadas pelas possíveis rotas entre cada par de localidades. Pela atual
configuração do serviço em estudo, a Tabela 1 mostra a quantidade de alternativa
de rotas sem e com transbordo para os três casos em questão.
Tabela 01: Pares de portos selecionados e suas quantidades de rotas por tipo
Porto de origem
Porto de
destino
Alternativas de rotas
sem transbordo
Alternativas de rotas
com transbordo
Total de alternativas
de rotas
Montevidéu
Fortaleza
Rio Grande
Suape
Rio Grande
Fortaleza
01
01
02
06
11
16
07
12
18
Seleção de Rota Marítima de Contêineres
173
No caso de uma rota com conexão, o contêiner deverá embarcar em um primeiro
navio (da rota I, II ou III), fazer o transbordo em algum porto para, em seguida,
embarcar em um segundo navio (da rota I, II ou III), conforme mostra a Tabela 2.
No caso de uma rota direta (sem transbordo), as etapas 3 e 4 são desconsideradas.
Tabela 02: Etapas operacionais do transporte marítimo de contêiner com transbordo
Etapa 1
Chegada do
contêiner no porto
de origem
Etapa 2
Etapa 3
Etapa 4
Etapa 5
Embarque do
contêiner no porto
de origem
Desembarque do
contêiner no porto
de transbordo
Embarque do
contêiner no porto
de transbordo
Chegada do
contêiner no porto
de destino
1° navio (rota I, II ou III)
2° navio (rota I, II ou III)
Dessa forma, o estudo foi limitado à utilização de duas variáveis de input, a saber:
Input 1: tempo
O tempo em trânsito da carga inicia-se com a chegada do contêiner no porto
de origem (etapa 1) e encerra-se com a entrega do contêiner no porto de destino
(etapa 5). Neste estudo é utilizado o calendário real do serviço, contendo as datas
programadas para as escalas dos navios das rotas I, II e III, nos onze portos. As rotas
I e III possuem freqüência semanal, e, a rota II, quinzenal. Foi determinada a data
de 01/01/2007 para a chegada do contêiner no porto de origem.
Input 2: custo
Três tipos de custos são considerados, a saber:
a) Custo de armazenagem do contêiner antes do embarque, cobrado pelo
terminal portuário do porto de origem (etapas 1 e 2);
b) custos de armazenagem do contêiner durante a conexão, cobrado pelo
terminal portuário do porto de transbordo (etapa 3 até 4);
c) custo da operação de transbordo, cobrado pelo terminal portuário do porto
de transbordo. Consideram-se, nesse item, as duas operações: desembarque do
contêiner do primeiro navio e o embarque do mesmo, no segundo (etapas 3 e 4).
174
Transporte em Transformação XI
Os custos de embarque do contêiner no porto de origem e desembarque no
porto de destino são desconsiderados, visto que eles são os mesmos para todas as
opções.
Os custos acima citados cabem ao transportador marítimo. Este, ao receber o
pedido de transporte do cliente, analisa os custos inerentes ao serviço de transporte
que será realizado e, teoricamente, calcula o frete que será cobrado do cliente com
base numa estimativa de custos que terá na operação completa, que inclui, dentre
outros, os três citados acima.
Ressalta-se que, teoricamente, quanto menor for o custo do transportador
marítimo na operação, menor será o frete cobrado do cliente.
Outro aspecto que deve ser ressaltado é que neste estudo são utilizados os
custos reais de cada terminal portuário.
5. Modelos Utilizados
Foram aplicadas as três técnicas (apresentadas na seção 2) a fim de obter uma
ordenação das rotas descritas conforme o cenário apresentado na seção anterior.
Na DEA, a opção natural é o modelo CRS, visto que, com o output constante,
não há que se levar em conta possíveis mudanças de escala. Da mesma forma, o
modelo foi orientado a input, pois se deseja minimizar os recursos utilizados, com
o output constante e unitário. Neste caso, o output unitário foi assumido com a
finalidade de representar a própria existência da rota, numa abordagem semelhante
à usada por Soares de Mello e Gomes (2004), de acordo com as considerações
teóricas de Lovell e Pastor (1999).
Para o cálculo das eficiências, utilizou-se o software SIAD (Angulo Meza et al.,
2005). Este usa o algoritmo Simplex (Dantzig, 1963) para a resolução de Problemas
de Programação Linear (PPL). Além disto, considera uma abordagem em Kuenzi
et al. (1971) que inclui uma sub-rotina para evitar problemas de degeneração, um
problema comum em DEA, devido à típica estrutura dos DEA PPLs.
175
Seleção de Rota Marítima de Contêineres
A Tabela 3 mostra as duas composições de opções de rotas (DMUs)
consideradas. O modelo 1 garante maior homogeneidade das DMUs, enquanto o
modelo 2 permite comparar DMUs pertencentes a dois grupos diferentes.
Tabela 03: Modelos desenvolvidos e inputs e outputs considerados
Modelo
Modelo DEA
Orientação do modelo
Tipos de rotas
Inputs
1
CRS
input
com transbordo
tempo
custo
unitário
2
CRS
input
sem e com
transbordo
tempo
custo
unitário
Output
A seguir, são apresentados os resultados em forma de ordenação (da rota mais
vantajosa para a menos atrativa).
Tabela 04: Postos finais através das três técnicas para Montevidéu – Suape
modelo 1
Montevidéu – Suape
DEA
6
1
4
2
5
3
Pareto
6
1
4
5
3
2
modelo 2
Copeland
6
1
2=4=5
3
DEA
7
6
1
4
2
3
5
Pareto
7
2
6
1
4
3
5
Copeland
7
6
1
2=4=5
3
Conforme mostra a Tabela 4, ao comparar as rotas do percurso MontevidéuSuape, os resultados obtidos através de DEA foram validados pelas duas outras
metodologias (Probabilística e Copeland). Observou-se apenas uma alteração,
no resultado obtido pela rota representada pela DMU 2. Neste caso, ela obteve
um pior resultado sob a ótica probabilística relativamente às demais, no caso do
modelo 1, que analisa somente as rotas com transbordo. No modelo 2, onde todas
os tipos de rotas são analisados, a abordagem probabilística, ao contrário, melhora
sua classificação em relação aos resultados obtidos através de DEA. Deve-se levar
em conta, entretanto, que a abordagem probabilística indica preferência absoluta
para a DMU 7 e preferências próximas de zero para todas as demais DMUs quando
competem com ela. No modelo 1, a abordagem probabilística também atribui
preferência próxima de zero para as DMUs 2 e 3.
176
Transporte em Transformação XI
Tabela 05: Postos finais através das três abordagens para Fortaleza – Rio Grande
modelo 1
Fortaleza Rio Grande
modelo 2
DEA
Probabilidade
Copeland
Posto
DEA
Probabilidade
Copeland
7
6
9
2
1
8
11
4
3
10
5
6
7
9
2
1
8
11
10
4
3
5
6
7
9
2
8
1
4
11
3
10
5
1º
2º
3º
4º
5º
6º
7º
8º
9º
10º
11º
12º
12
6
9
7
2
1
4
11
8
3
5
10
12
6
9
4
7
2
1
11
3
8
5
10
6=12
7
9
2
8
1=4
11
3
10
5
Na tabela 5, pode-se observar, no modelo 1, que as abordagens probabilística
e de Copeland invertem as colocações das duas primeiras colocadas sob a ótica DEA
(DMUs 7 e 6). Com relação às demais DMUs analisadas no modelo 1, observa-se
que grande parte delas obteve a mesma colocação sob a ótica probabilística e de
Copeland. O mesmo ocorreu no modelo 2, sendo que, dentre as primeiras colocadas,
destaca-se, apenas, que a DMU 6 passa a ser equivalente à DMU quando se adota
o método de Copeland.
177
Seleção de Rota Marítima de Contêineres
Tabela 06: Postos finais através das três abordagens para Rio Grande – Fortaleza
modelo 1
Rio Grande Fortaleza
modelo 2
DEA
Probabilidade
Copeland
Posto
DEA
Probabilidade
Copeland
14
11
12
5
9
15
3
10
2
6
4
13
16
8
1
7
14
11
5
12
9
3
4
6
15
16
8
10
2
13
1
7
14
11
12
5
9
15
4
6
13
3
16
10
2
1
8
7
1º
2º
3º
4º
5º
6º
7º
8º
9º
10º
11º
12º
13º
14º
15º
16º
17º
18º
18
17
14
11
15
12
9
5
3
6
16
8
10
1
2
13
4
7
18
17
14
11
15
12
9
6
16
1
5
3
8
10
13
4
2
7
18
17
14
11=12
5
9
15
4
6
13
3
16
10
2
1
8
7
Para o terceiro caso estudado, os resultados obtidos através das três
metodologias são apresentados na Tabela 6. Há significativa similaridade no que
se refere à classificação obtida pelas DMUs sob as três óticas estudadas. Foram
observadas algumas alterações apenas nas posições intermediárias e inferiores da
tabela de classificação.
6. Considerações Finais
A análise realizada demonstrou a estabilidade da metodologia adotada quanto
ao uso de diferentes alternativas de composição de critérios, além de demostrar a
viabilidade de ordenação de opções de rotas entre duas dadas localidades, sendo
útil, nesse caso, para o tomador de decisões (transportador marítimo).
Tendo em vista a necessidade de fortalecer esse modal de transporte, tornando-o
mais competitivo e contribuindo para uma logística integrada, esta ferramenta pode
178
Transporte em Transformação XI
ser útil e aplicável a qualquer serviço oferecido pelas empresas de navegação em
geral.
Atualmente, a empresa estudada não possui uma ferramenta de auxílio no
apoio à decisão relacionada à seleção de rota marítima de contêiner na costa leste
da América do Sul. Tampouco existe uma metodologia desenvolvida para medir
a eficiência das rotas de cargas, a partir de rotas fixas de navios previamente
definidas.
Entre os possíveis desenvolvimentos futuros desta pesquisa, destacase o transporte de outros tipos de contêineres, incluindo o específico para carga
refrigerada, que possui diferentes custos de armazenagem nos terminais portuários.
Um outro possível ponto a ser abordado é o transporte de mais de um contêiner,
considerando as capacidades dos navios.
Agradecimentos
Os autores agradecem a todos os colegas que ajudaram com informações e sugestões ao
longo do desenvolvimento deste trabalho.
Seleção de Rota Marítima de Contêineres
179
Referências bibliográficas
Adler, N. e B. Golany (2001) Evaluation of deregulated airline networks using
data envelopment analysis combined with principal component analysis with
an application to Western Europe. European Journal of Operational Research,
North-Holland, p. 260-273.
Angulo-Meza, L.; L. B. Neto; J. C. C. B. Soares de Mello; E. G. Gomes (2005)
ISYDS - Integrated System for Decision Support (SIAD - Sistema Integrado de
Apoio a Decisão): a software package for data envelopment analysis model.
Pesquisa Operacional, (25), 3, p 493-503.
Arrow, K. J. (1951) Social Choice and Individual Values. Wiley, New York, EUA.
Barba-Romero, S. e Pomerol, J.C. (1997) Decisiones Multicriterio: Fundamentos
Teóricos e Utilización Práctica. Colección de Economía, Universidad de Alcalá, Espanha.
Charnes, A.; A. Gallegos e H. Li (1996) Robustly efficient parametric frontiers
via Multiplicative DEA for domestic and international operations for the Latin
America airline industry. European Journal of Operational Research, NorthHolland, p. 525-536.
Charnes, A.; W. W. Rhodes e E. Rhodes (1978) Measuring the Efficiency of Decision Making Units. European Journal of Operational Research, North-Holland,
p. 429-444.
Copeland, A. H. (1951) A reasonable social welfare function. Mimeo, University
of Michigan.
Dantzig, G. B. (1963) Linear Programming and Extensions. Princeton Univesity
Press, Princeton, NJ, USA.
Dias, L. M. C.; Almeida, L. M. A. T. e Clímaco, J. C. N. (1996) Apoio Multicritério à Decisão. Faculdade de Economia da Universidade de Coimbra, Coimbra,
Portugal.
Fernandes, E. e H.M.P. Capobianco (2000) Eficiência e estratégia financeira de
empresas de aviação: uma comparação internacional. Editora COPPE/UFRJ,
Rio de Janeiro, p. 85-102.
Fernandes, E. e R. R. Pacheco (2002) Efficient use of airport capacity. Transportation Research Part A: Policy and Practice, North-Holland, p. 225-238.
Gonçalves, L. C. N. I. (2005) Avaliação de eficiência na logística de distribuição:
estudo de caso na entrega domiciliar de jornais no Rio de Janeiro. Dissertação
de Mestrado em Engenharia de Produção, Universidade Federal Fluminense,
Niterói, RJ.
180
Transporte em Transformação XI
Itoh, H. (2002) Efficiency changes at major container ports in Japan: A window
application of DEA. Rurds, v. 14, n. 2.
Kuenzi, H.P.; H.G. Tzschach e C. A. Zehnder (1971) Numerical Methods of Mathematical Optimization. Academic Press, NY, USA.
Lovell, C.A.K. & Pastor, J.T. (1999). Radial DEA models without inputs or without
outputs. European Journal of Operational Research, 118, 46-51.
Martinez-Budria, E.; R. D. Armas; M. N. Ibanez e R. Mesa (1999) A study of the
efficiency of spanish port authorities using Data Envelopment Analysis. International Journal of Transport Economics, v. 26, n. 2, p. 237-253.
Novaes, A.G.N. (2001) Rapid-transit efficiency analysis with the assurance-region
DEA method. Pesquisa Operacional, Rio de Janeiro, v. 21, n. 2, p. 179-197.
Roll, Y e Y. Hayuth (1993) Port performance comparison applying DEA. Maritime
Policy and Management, v. 20, n. 2, p. 153-161.
Sant’Anna, A. P. (2002) Cálculo Probabilístico de Produtividades Globais. Anais
do XXXIV SBPO, Rio de Janeiro.
Sant’Anna, A. P. (2005) Weighting Points of View in the Composition of Correlated
Criteria of Variable Importance. Anales de la XVI EPIO, Córdoba.
Soares de Mello, J. C. C. B.; L. A. Meza; Gomes, E.G.; Serapião, P. B. e M. P.
E. Lins (2003) Análise de envoltória de dados no estudo da eficiência e dos
benchmarks para companhias aéreas brasileiras. Pesquisa Operacional, Rio de
Janeiro, v. 23, n. 2, p. 325-345.
Tongzon, N. J. (2001) Efficiency Measurement of select Australian an international port using Data Envelopment Analysis. Transportation Research, NorthHolland, part A, v. 35, p. 113-128.
Turner, H.; R. Windle e M. Dresner (2004) North American container port productivity. Transportation Research, North-Holland, part E, v. 40, p. 339-356.
Marcio Arzua Caillaux ([email protected])
Annibal Parracho Sant’anna ([email protected])
Lidia Angulo Meza ([email protected])
João Carlos Correia Baptista Soares de Mello ([email protected])
Departamento de Engenharia de Produção, Escola de Engenharia, Universidade Federal Fluminense
Rua Passo da Pátria, 156 – Niterói, RJ, Brasil
Índice de Acessibilidade
por Transporte Coletivo
9
Luciana Guadalupe Ferronatto
Fernando Dutra Michel
Empresa Pública de Transporte e Circulação – EPTC
Resumo
O artigo propõe uma medida agregada de acessibilidade por transporte coletivo.
Adota-se o termo no sentido de facilidade de acesso a diferentes destinos, a partir de
uma dada origem. A composição do índice de acessibilidade por transporte coletivo
parte de uma base teórica para selecionar indicadores representativos dos fatores
de acessibilidade. A metodologia proposta utiliza uma base georreferenciada para
agregação dos dados em zonas de tráfego. É apresentada uma aplicação do método
proposto ao caso de Porto Alegre.
182
Transporte em Transformação XI
Abstract
The aim of this work is to develop an aggregate accessibility index for public
transport. The index is based on the degree of resilience to access different destinations,
given a specific origin. A theoretical basis is considered in order to select indicators
that actually represent the accessibility factors influencing accessibility. The proposed
methodology includes Geographic Information Systems to aggregate the data into
traffic zones. A practical exercise is conducted using data from Porto Alegre, Brazil.
Palavras-chave
Acessibilidade, índice de acessibilidade, transporte coletivo.
1. Introdução
O termo acessibilidade resume conceitos diversos em diferentes áreas do
conhecimento. Mesmo no campo de transportes, encontram-se dois focos distintos:
por um lado, trata-se da acessibilidade física aos equipamentos de transportes, tais
como paradas de ônibus, estações e veículos; e, por outro lado, entende-se como
a facilidade de atingir um destino, a partir de uma origem. Empregamos a palavra
acessibilidade, no presente artigo, com este último sentido.
Considerando a significativa participação do transporte coletivo na divisão
modal das grandes cidades brasileiras, o atendimento adequado das necessidades de
transporte da população urbana bastaria para justificar esforços no sentido de medir
e avaliar as condições da oferta. No entanto, há ainda outras razões para que se
desenvolvam ferramentas de apoio ao planejamento e à decisão nesse campo. Entre
elas, a urgência de reverter parte dos usuários de automóvel ao uso de transporte
coletivo, como forma de mitigar congestionamentos e poluição.
O objetivo deste trabalho foi estabelecer uma medida agregada de
acessibilidade que permitisse a comparação entre regiões de uma cidade, assim
como o acompanhamento da evolução de uma região. Como ferramenta de apoio à
decisão, pode representar um maior respaldo e aceitação pública.
Índice de Acessibilidade por Transporte Coletivo
183
Este artigo propõe um índice agregado para medir a acessibilidade por
transporte coletivo. A partir de uma base teórica, indicadores representativos de
fatores de acessibilidade são selecionados para compor o índice. Propõe-se uma
metodologia para agregação dos dados primários em dois níveis: primeiro, em
paradas de ônibus; depois em zonas de tráfego. A aplicação do método ao caso de
Porto Alegre é apresentada e, finalmente, o índice resultante, representando os níveis
de oferta de transporte coletivo, é comparado aos níveis de demanda encontrados
nas zonas de tráfego.
2. Acessibilidade: definição e quantificação
Segundo Litman (2007), acessibilidade é a capacidade para alcançar
atividades, serviços, mercadorias ou quaisquer destinos desejados. No campo da
sociologia, trata-se da capacidade de utilizar serviços e oportunidades, enquanto no
projeto de equipamentos urbanos entende-se acessibilidade como o desenho que
permite acesso a pessoas com deficiências de locomoção. As várias especialidades
apresentam focos diferenciados na abordagem desse tema e, em planejamento de
transportes, acessibilidade relaciona-se geralmente com o acesso físico aos objetivos
individuais.
Na definição do BTS (1997), enquanto a mobilidade mede quanto as pessoas
viajam, a acessibilidade indica quão facilmente as pessoas podem chegar ao seu
destino. Essa facilidade pode ser representada por um baixo custo generalizado de
deslocamento, somando o dispêndio de tempo, dinheiro, esforço, risco, etc. Entre
os fatores a considerar, destacam-se: 1) a mobilidade proporcionada pelos diversos
modos de transporte; 2) a conectividade entre origens e destinos; 3) a distribuição
das atividades no espaço, ou uso do solo; e 4) os substitutos da mobilidade, tais
como telecomunicações e serviços de entregas (Litman, 2007).
2.1. Quantificação da acessibilidade
A necessidade de estabelecer uma medida quantitativa de acessibilidade
decorre da ampla utilização do termo entre os objetivos de projetos de transportes.
Para avaliar a eficácia de tais projetos, é indispensável a utilização de indicadores.
Entretanto, como a acessibilidade é influenciada por diversos fatores, vários
indicadores precisam ser acompanhados em sua avaliação. Uma medida agregada,
184
Transporte em Transformação XI
cuja composição seja totalmente transparente e válida, permite a avaliação direta
dos resultados eventualmente obtidos em relação ao objetivo. Além disso, uma
medida simplificada tem grande utilidade na divulgação de informações e como
apoio à discussão comunidades afetadas por projetos de transportes.
2.1.1. Como medir
Segundo MacLaren (1996), bons indicadores são cientificamente válidos,
representativos de uma ampla faixa de condições, sensíveis a mudanças, relevantes para
as necessidades dos potenciais usuários, comparáveis, com custos razoáveis de coleta
e uso, atraentes para divulgação e não-ambíguos. Conhecidos os fatores que afetam
a acessibilidade, podem ser estabelecidos indicadores representativos. Considerando
que o presente estudo refere-se ao transporte coletivo, freqüência e cobertura dos
serviços disponíveis são indicadores adequados para medir acessibilidade.
De acordo com Saisana et al (2005a), a combinação de indicadores em um
índice pode agregar maior quantidade de informação em uma medida única, mais
fácil de interpretar embora seja mais sofisticada. Índices compostos podem ser
usados para resumir questões complexas ou multidimensionais com o objetivo de
dar suporte à decisão, oferecem uma visão geral, facilitam a tarefa de classificação,
ajudam a atrair o interesse do público porque facilitam a comparação com outros
sistemas e resumem a informação. Por outro lado, podem levar a conclusões
simplistas se não forem usados em conjunto com os indicadores originais. A
conveniência de utilizar-se índices agregados ao invés de indicadores isolados é
discutida por Booysen (2004), que destaca a necessidade de não se perder de vista
os indicadores desagregados quando se utiliza um índice.
2.2 Índices de acessibilidade
Uma medida muito simples de acessibilidade ao transporte coletivo é a
estratificação dos domicílios da área de estudo segundo sua distância da linha
ou parada mais próxima (BTS, 1997). Conforme agregam mais informações, as
medidas tornam-se mais sofisticadas mas não necessáriamente mais difíceis de
compreender. Ponderando relevância das informações e custo de obtenção dos
dados, pode-se compor um índice de acessibilidade de fácil compreensão e baixo
custo, principalmente se os indicadores componentes já têm dados disponíveis,
analisados individualmente.
Índice de Acessibilidade por Transporte Coletivo
185
Bhat et al (2002) propõem um índice de acessibilidade urbana que mede a
quantidade de oportunidades acessíveis a uma zona, dentro de uma determinada
distância ou tempo de viagem. Dados relativos ao uso do solo e infra-estrutura de
transportes são analisados em um sistema de informações geográficas (SIG).
Rood (1997) desenvolveu um índice de disponibilidade de transporte coletivo
para a cidade de Sacramento, California. Os indicadores componentes do índice são
construídos a partir da freqüência e capacidade ofertadas e da população residente
e empregos localizados em uma unidade de área. A metodologia empregada não
requer recursos sofisticados, podendo ser implementada em planilhas eletrônicas
comuns, com o uso opcional de SIG.
Grengs e Arbor (2003) desenvolveram um método que mede a acessibilidade
por transporte coletivo, combinando a avaliação de padrões de uso do solo e serviços
de transporte coletivo. O método inclui a formulação de um modelo gravitacional e
o cálculo de um índice de acessibilidade.
Uma boa revisão sobre indicadores e índices para avaliação de serviços de
transporte coletivo encontra-se em TCRP (2003). A publicação é um guia para
desenvolvimento de sistemas de indicadores. Raia Jr. (2000), que propõe a análise
conjunta de acessibilidade e mobilidade como forma de estimar potencial de viagens,
também apresenta uma revisão de conceitos e medidas de acessibilidade.
2.3. Ferramentas utilizadas
Uma revisão sobre métodos de normalização e agregação de indicadores para
formulação de índices compostos encontra-se em Saisana et al (2005b). No presente
estudo foi utilizado o método de análise hierárquica (Saaty, 1991) para atribuição
de pesos em diferentes etapas da agregação de indicadores.
A agregação de dados de transporte coletivo em unidades de área foi facilitada
pelo uso de um sistema de informações geográficas (SIG). Sem o auxílio dessa
ferramenta, a aplicação da metodologia torna-se demasiado trabalhosa.
186
Transporte em Transformação XI
3. Estrutura do índice de acessibilidade por transporte coletivo
O índice reflete o nível de acessibilidade, ou facilidade de acesso, por
transporte coletivo a diferentes destinos em uma área da zona urbana. Uma unidade
de área para análise é definida e fatores que afetam a acessibilidade são agregados
nessa unidade.
3.1. Unidades de análise
A unidade de área estabelecida para essa análise foi a zona de tráfego (ZT). Por
ser amplamente utilizada em estudos de transportes, oferece facilidades no que se
refere a disponibilidade de dados e termos de comparação com outros indicadores.
3.2. Fatores de acessibilidade
O acesso ao transporte coletivo pode ser facilitado, ou dificultado, por fatores
espaciais, temporais e econômicos, ou sócio-econômicos. O índice proposto não
abrange fatores sócio-econômicos, tais como tarifa, subsídios e características
culturais que afetam a acessibilidade. Trata-se, exclusivamente, da acessibilidade
espacial e temporal proporcionada pelo transporte coletivo.
A proporção de área de uma ZT atendida por paradas e a variedade de destinos
alternativos oferecidos representam a acessibilidade espacial. A freqüência diária
do serviço ofertado na parada é utilizada como medida de acessibilidade temporal.
3.3. Formulação do Índice
A estrutura de indicadores que compõem o índice de acessibilidade proposto
pode ser resumida da seguinte forma:
• Uma Zona de Tráfego (ZT) tem um nível de acessibilidade por transporte
coletivo de acordo com:
m O nível de acessibilidade oferecido pelas Paradas de ônibus que
atendem essa zona, o qual é função da
• freqüência dos
• serviços e
• destinos ofertados
Índice de Acessibilidade por Transporte Coletivo
187
Uma ZT é atendida por todas as paradas localizadas no seu interior ou a uma
distância de caminhada da referida zona (500 metros). O Índice de Acessibilidade
da ZT (IAZT) é calculado em função da proporção de sua área atendida por paradas
e do nível dessas paradas.
Cada parada de ônibus que atende a ZT oferece uma certa freqüência diária
de viagens de um ou mais serviços, dando acesso a diferentes destinos. O Nível das
Paradas (NP) é calculado em função da freqüência ofertada e do valor atribuído aos
Serviços/Destinos (SD).
Serviços são alternativas com características diferenciadas tais como, por
exemplo, Expresso e Parador. Destino representa a oferta de destinos alternativos
na parada. Ideal seria uma medida do número de zonas acessíveis através de um
determinado serviço. Entretanto, pode-se simplificar através de características das
linhas, tais como alimentadoras (que dão acesso principalmente a um terminal
de outras linhas), interbairros (que dão acesso a outros bairros), centro, etc. A
importância, ou valor relativo, dos Destinos oferecidos e dos Serviços pode ser
estimada através de análise hierárquica (Saaty, 1991), comparando-se as alternativas
par a par. Esse método foi empregado na aplicação em Porto Alegre, resultando os
valores da Tabela 1, os quais representam o consenso de 6 técnicos em planejamento
de transportes.
Tabela 1 – Valor atribuído aos Serviços/Destinos (SD)
SD
Destinos
Alimentador
Interbairros
Retorno
Centro
Transversal
(1),
Serviços
Parador
Direto
0,02
0,04
0,04
0,09
0,04
0,09
0,11
0,23
0,11
0,23
O nível de uma parada (NP) pode, então, ser calculado segundo a equação
NP SD F
(1)
188
Transporte em Transformação XI
onde:
SD = é o valor do Serviço/Destino ofertado na parada
F = é a freqüência diária do Serviço/Destino ofertado na parada
Os NP encontrados são normalizados, adequando-se a uma escala de 0 a 1,
de acordo com a equação (2). Este procedimento relativiza os valores, facilitando
a interpretação.
NP
NORM
NP NPMínimo
(2)
NPMáximo NPMínimo
Agora, as paradas podem ser classificadas segundo seu nível NPNORM, que
varia de 0 a 1, sendo 1 o nível mais alto, com o melhor serviço. A classificação
em 10 intervalos iguais permite a atribuição de valores a essas classes, em um
procedimento simples de análise hierárquica (Saaty, 1991). A Tabela 2 traz a
classificação com os respectivos valores, cuja soma é igual a 1.
Tabela 2 – Classes de paradas de ônibus
Classe (N P )
0 a 0,1
0,11 a 0,2
0,21 a 0,3
0,31 a 0,4
0,41 a 0,5
0,51 a 0,6
0,61 a 0,7
0,71 a 0,8
0,81 a 0,9
0,91 a 1
VP
0,0152
0,0203
0,0284
0,0401
0,0564
0,0788
0,1094
0,1515
0,2099
0,2900
Através de uma seleção das paradas de cada classe em um SIG, pode-se
avaliar a área de cada ZT coberta por essa classe de paradas. Tem-se, assim, todas as
condições para chegar ao Índice de Acessibilidade (IAZT), através da equação (3).
IA
ZT
A V
A
cob
total
P
ANP
(3)
Índice de Acessibilidade por Transporte Coletivo
189
onde:
A
A
cob
total
= área total da ZT coberta por quaisquer paradas (raio de 500m)
= área total da ZT
VP = valor atribuído a uma classe de paradas
A
NP
% de área da ZT coberta por paradas de uma classe
Finalmente, IAZT também deve ser normalizado, para maior facilidade de
interpretação.
4. Aplicação
O índice proposto foi aplicado ao caso de Porto Alegre, abrangendo apenas a
área do município e, portanto, o transporte coletivo por ônibus intra-urbano. A área
de estudo é subdividida em 98 zonas de tráfego, como ilustra a Figura 1.
Figura 1 – Zonas de Tráfego, Porto Alegre
190
Transporte em Transformação XI
4.1. Acessibilidade das paradas de ônibus
O cadastro de paradas de ônibus é georreferenciado, permitindo o
relacionamento dos dados da parada com itinerários e freqüência de linhas de
ônibus em um sistema de informação geográfica (SIG). O nível da parada (NP) foi
calculado de acordo com a equação (1), multiplicando-se a soma das freqüências
pelo valor atribuído ao Serviço/Destino (SD) correspondente.
Para atribuição dos pesos, foram considerados 2 tipos de serviço (Parador
e Direto) e 5 tipos de destinos (Alimentador, Retorno, Interbairros, Centro e
Transversal). Foi aplicada análise hierárquica (Saaty, 1991) para atribuição dos
valores, resumidos na Tabela 1. A subdivisão de serviços agrega um elemento de
velocidade (que reflete no tempo de viagem) à avaliação de acessibilidade. Quanto
aos destinos, linhas alimentadoras dão acesso a destinos pouco atrativos; o centro
da cidade oferece a maior quantidade de oportunidades e linhas transversais dão
acesso a pólos de atração diferenciados que não se localizam no centro.
A Figura 2 ilustra a localização das paradas, classificadas em 10 intervalos
segundo os níveis de acessibilidade encontrados. Essa classificação foi utilizada
para atribuição dos pesos encontrados na Tabela 2, utilizados para cálculo do Índice
de Acessibilidade através da equação (3).
Índice de Acessibilidade por Transporte Coletivo
191
Figura 2 – Classes de Paradas de Ônibus
4.2. Acessibilidade das zonas de tráfego
De acordo com a formulação enunciada no item 3.3, o Índice de Acessibilidade
da ZT é calculado a partir da equação (4). A área de cobertura das paradas foi
estabelecida em um raio de 500 metros, distância máxima de caminhada admitida
em Porto Alegre. A Figura 3 mostra o mapa de acessibilidade por zonas de tráfego,
normalizado em uma escala de 0 a 1, de maneira semelhante à normalização dos
níveis de acessibilidade das paradas, conforme equação (2). As áreas mais escuras
têm maior acessibilidade.
De maneira geral, nota-se o aumento da acessibilidade a partir da periferia, em
direção ao centro da cidade, o que é condizente com o desenho predominantemente
192
Transporte em Transformação XI
radial das linhas de transporte coletivo. Uma exceção fica visível no mapa: algumas
zonas contíguas com localização próxima ao centro e nível de acessibilidade igual
ao da periferia. Trata-se de uma região de renda alta, cujas viagens são realizadas
predominantemente por transporte individual. A oferta de transporte coletivo ajustase a essa demanda. Como representação dos níveis de oferta, o mapa foi avaliado
positivamente por técnicos que atuam no planejamento de transporte coletivo.
Figura 3 – Acessibilidade por Zona de Tráfego
Índice de Acessibilidade por Transporte Coletivo
193
4.3. Sensibilidade do índice
Um fator relevante na construção de um índice é sua sensibilidade à variação
nos componentes. Como resultado da formulação proposta, quando uma zona tem
100% de sua área atendida por paradas de todos os níveis, seu índice de acessibilidade
é igual a 1.
A variação do índice de acessibilidade em função da área coberta por
diferentes classes de paradas é ilustrada pelas curvas da Figura 4. As classes de
níveis mais baixos (até 5), que compõem a maioria das paradas de Porto Alegre, têm
pequena influência no índice e, mesmo com 100% de cobertura em uma zona, não
modificariam o mapa da Figura 3, com 10 classes de intervalos iguais. Entretanto,
se fossem consideradas 20 classes no mapa de acessibilidade, 100% de cobertura de
paradas de nível 4,1 a 5,0 representaria uma alteração já visível.
Sensibilidade à área de cobertura
0,4500
0,4000
0,3500
0,91 a 1
0,81 a 0,9
0,3000
0,71 a 0,8
0,61 a 0,7
0,2500
IA ZT
0,51 a 0,6
0,2000
0,41 a 0,5
0,31 a 0,4
0,1500
0,21 a 0,3
0,11 a 0,2
0,1000
0 a 0,1
0,0500
0,0000
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
A NP
Figura 4 – Índice de Acessibilidade x cobertura de diferentes classes
194
Transporte em Transformação XI
A Figura 5 mostra a variação do nível das paradas segundo a oferta de
diferentes Serviços/Destinos. Uma parada de ônibus que dá acesso somente a
linhas alimentadoras não passaria da classe 1 (NP_NORM de 0 a 0,10) com uma
freqüência menor do que 2.000 viagens/dia. A freqüência de viagens interbairros já
provoca uma mudança de classe com cerca de 1000 viagens/dia, enquanto as linhas
de acesso ao centro e diretas provocam mudanças mais rápidas. Naturalmente que
tais freqüências somente serão alcançadas somando-se diversas linhas que atendem
uma mesma parada.
1
0,9
0,8
0,7
NP_NORM
0,6
Direta
Centro
Interbairros
Alimentadora
0,5
0,4
0,3
0,2
0,1
0
0
100
200
300
400
500
600
700
800
900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000
viagens/dia
Figura 5 – Acessibilidade das paradas x freqüência
5. Oferta x Demanda
O Equilíbrio (ou desequilíbrio) entre oferta de transporte coletivo e demanda
potencial foi avaliado, com o objetivo de complementar a informação obtida através
do índice de acessibilidade. A partir do número de viagens atraídas e produzidas
por zona de tráfego pode-se obter um nível adimensional de atração e produção,
variando de zero a 1, conforme equação (4).
5
OFERTA X DEMANDA
O Equilíbrio (ou desequilíbrio) entre oferta de transporte coletivo e demanda potencial
Índice de Acessibilidade
por Transporte
Coletivo
avaliado, com o objetivo de complementar
a informação
obtida
através
195do índice
acessibilidade. A partir do número de viagens atraídas e produzidas por zona de tráfego p
se obter um nível adimensional de atração e produção, variando de zero a 1, confo
equação (4).
ATR __ PROD
PROD
N __ ATR
ZTZT
==
ATR ++ PROD
PRODZTZT −− ATR
ATR ++ PROD
PRODMínimo
ATR
Mínimo
ATR ++ PROD
PRODMáximo
− ATR
ATR ++ PROD
PRODMínimo
ATR
Máximo −
Mínimo
(4)
(4
N _ ATR _ PROD é a soma de viagens atraídas e produzidas pela zona
tráfego.
O número de viagens considerado
representa
o totalatraídas
por todos
os modos, não som
Onde
é a soma
de viagens
e produzidas
N
_
ATR
_
PROD
por transporte coletivo, buscando representar a demanda potencial mais do que a dema
Onde
ZT
ZT
pela zona de tráfego. O número de viagens considerado representa o total por todos
a qual
pode ser
pelacoletivo,
oferta de buscando
transporterepresentar
coletivo. a demanda
osmanifesta,
modos, não
somente
porrestrita
transporte
A quantificação
do nível
de equilíbrio
entre
oferta
de Acessibilidade)
potencial
mais do que
a demanda
manifesta,
a qual
pode(Índice
ser restrita
pela oferta de e dema
(Nível decoletivo.
Atração/Produção de viagens) está representada na Figura 6 e foi calcu
transporte
subtraindo-se
N_ATR_PROD
IA. Assim,
quanto
mais
próximo
de zero, maior o equilíb
A quantificação
do nível dedeequilíbrio
entre
oferta
(Índice
de Acessibilidade)
Valores
positivos
indicam
sobre-oferta
e
vice-versa.
e demanda (Nível de Atração/Produção de viagens) está representada na Figura 6 e
foi
calculadoo subtraindo-se
N_ATR_PROD
IA. Assim, quanto
mais
próximo
de à oferta
Enquanto
mapa da Figura
3 permite adecomparação
de zonas
apenas
quanto
zero,
maior
o
equilíbrio.
Valores
positivos
indicam
sobre-oferta
e
vice-versa.
transporte coletivo, o mapa da Figura 6 agrega a ponderação de oferta e demanda. A parti
Enquanto de
o mapa
da Figura
permite
a comparação
zonase apenas
quanto
identificação
zonas
com 3níveis
discrepantes
de de
oferta
demanda,
os indicad
à componentes
oferta de transporte
coletivo,
o
mapa
da
Figura
6
agrega
a
ponderação
de
oferta
do índice de acessibilidade podem ser resgatados.
e demanda. A partir da identificação de zonas com níveis discrepantes de oferta
e demanda, os indicadores componentes do índice de acessibilidade podem ser
resgatados.
Figura 6 – Desequilíbrio entre oferta e demanda
196
Transporte em Transformação XI
Figura 6 – Desequilíbrio entre oferta e demanda
6. Conclusões e Desenvolvimento Futuro
O índice proposto caracteriza satisfatoriamente as zonas de tráfego quanto à
oferta de transporte coletivo. Entretanto, a utilidade prática dessa medida pode ser
mais efetiva se a mesma for ponderada através de comparação com a demanda.
A sensibilidade do índice a alterações nos vários elementos indica uma
aplicabilidade compatível com o planejamento estratégico, mais do que operacional,
onde os projetos alteram significativamente a oferta de transportes. A ordem de
grandeza da influência de pequenas modificações em indicadores isolados sobre
Índice de Acessibilidade por Transporte Coletivo
197
o resultado final dificilmente poderia ser representada graficamente de maneira
visível. Isso condiz com a proposta inicial do estudo, de relativização do nível local
de acessibilidade.
Dando seqüência ao estudo, pretende-se incluir na avaliação a oferta de
transporte coletivo em fins-de-semana, o que dá uma dimensão da acessibilidade
oferecida para atividades de lazer. Além disso, dados relativos a capacidade ofertada
deverão ser considerados, por representarem uma informação mais exata do que
somente a freqüência.
198
Transporte em Transformação XI
Referências bibliográficas
BHAT, C. et al (2002) Development of an Urban Accessibility Index: a Summary.
Center for Transportation Research, The University of Texas at Austin.Project
Summary Report 4938-S.
BTS (1997), Mobility and Access: Transportation Statistics Annual Report 1997,
Bureau of Transportation Statistics (www.bts.gov), pp. 173-192.
GRENGS, J. e Arbor, A (2003) Measuring Change in Small-Scale Transit Accessibility with GIS: the Cases of Buffalo and Rochester. Urban and Regional
Research Collaborative, University of Michigan. Working Paper URCC 03-04.
LITMAN, T. (2007) Evaluating Accessibility for Transportation Planning. Victoria Transport Policy Institute, Victoria, Canada.
MacLaren, V. (1996) Urban Sustainability Report, Journal of the American
Planning Association, 3 – 22.
RAIA JR., A. A. (2000) Mobilidade e Acessibilidade na Estimativa de um Índice de
Potencial de Viagens Utilizando Redes Neurais Artificiais e Sistemas de Informações Geográficas. Tese de Doutorado, USP, EESC, São Carlos, SP.
ROOD, T. (1997) Local Index of Transit Availability: Riverside County, California Case Study Report. Local Government Commission, Sacramento, CA.
SAISANA, M. et al (2005a) Knowledge Economy Indicators: State-of-the-Art
Report on Composite Indicators for the Knowledge-based Economy. Joint Research Centre, European Commission, Ispra, Italia. Disponível na internet: http://
kei.publicstatistics.net.
SAISANA, M. et al (2005b) Knowledge Economy Indicators: Input to Handbook of Good Practices for Composite Indicators’ Development. Joint Research
Centre, European Commission, Ispra, Italia. Disponível na internet: http://kei.
publicstatistics.net.
SAATY, T. L. (1991) Método de Análise Hierárquica. Makron Books do Brasil
Editora Ltda. e Editora McGraw-Hill do Brasil, Rio de Janeiro/RJ.
TCRP (2003) A Guidebook for Developing a Transit Performance-Measurement System, TCRP Report 88. Transit Cooperative Research Program, Transportation Research Board, Washington, DC.
Endereços dos autores:
Luciana Guadalupe Ferronatto - [email protected]
Fernando Dutra Michel - [email protected]
Empresa Pública de Transporte e Circulação – EPTC
R. João Neves da Fontoura, 7
90050-030 – Porto Alegre - RS
Procedimento de Análise
de Ciclo de Vida para Comparação
de Fontes de Energia para
o Transporte no Brasil
10
Márcio de Almeida D’Agosto
Suzana Kahn Ribeiro
Universidade Federal do Rio de Janeiro
Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de Engenharia – COPPE
Programa de Engenharia de Transportes
Resumo
Apresenta-se um procedimento desenvolvido a partir da Análise de Ciclo de
Vida (ACV) para uma primeira abordagem na comparação de alternativas de fontes
de energia para transportes. O procedimento é aplicado ao transporte rodoviário
por automóveis na comparação entre três alternativas adotadas no Brasil (gasolina
com 25% de etanol, etanol e gás natural comprimido) considerando o uso final no
tráfego urbano no Município do Rio de Janeiro, Brasil. O trabalho baseou-se em
dados representativos da realidade brasileira e os resultados destacam a adequação
do procedimento em identificar, ao longo do ciclo de vida de cada alternativa, onde
ocorrem vantagens específicas, em particular no uso de combustíveis renováveis
oriundos da biomassa, opção praticada e interessante para a realidade brasileira.
200
Transporte em Transformação XI
Abstract
This article presents a procedure developed from life cycle analysis (LCA)
for a first approach for comparing energy source alternatives for transportation. We
apply the procedure to passenger car transportation, comparing three fuels used
in Brazil (gasoline with 25% ethanol, pure ethanol and compressed natural gas),
considering their use in urban traffic in the city of Rio de Janeiro and representative
data of Brazilian reality. The results show the procedure is suitable to identify, over
the life cycle of each alternative, where specific advantages occur, particularly in
the use of renewable fuels made from biomass, an option already practiced and
appropriate for Brazilian reality.
1. Introdução
No Brasil, entre 1996 e 2005, o consumo de energia para transportes cresceu
17%, dos quais, o transporte rodoviário respondeu por cerca de 90%, envolvendo
derivados de petróleo (81%), gás natural comprimido (4%) e etanol de cana-deaçúcar (15%) (MME, 2007). A prática do desenvolvimento sustentável implica na
escolha destas alternativas considerando toda a cadeia de suprimento, o que pode ser
feito por meio da aplicação da Análise de Ciclo de Vida (ACV) (IEA, 1999). Porém,
a difusão da ACV nos países em desenvolvimento depende de considerações que se
aplicam especificamente à realidade de cada sociedade por meio do desenvolvimento
de procedimentos específicos capazes de equilibrar alcances e limitações.
A partir da análise de um conjunto de referências selecionadas, este artigo
propõe um procedimento baseado nas duas primeiras fases ACV para a comparação
de alternativas de fontes de energia para transportes sob a óptica do consumo de
energia. O procedimento é aplicado ao transporte rodoviário por automóveis na
comparação entre gasolina com 25% de etanol, etanol e gás natural comprimido,
considerando o seu uso final no tráfego urbano no Município do Rio de Janeiro e
baseando-se em dados representativos da realidade brasileira.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
201
2. Aplicação Da Acv Às Fontes De Energia Para Transporte
Os estágios típicos do ciclo de vida de um produto são extração e processamento
de matéria-prima, produção e uso final; sendo os três primeiros relacionados à cadeia
de suprimento (ABNT, 2001). Não existe um único método para conduzir a ACV
(Hanssen, 1998; Culaba e Purvis, 1999;), havendo flexibilidade para prática com
base nos requisitos mínimos da norma. Investigar a aplicação da ACV às fontes de
energia para o transporte rodoviário é um dos objetivos deste artigo. Doze trabalhos
que tratam deste assunto foram selecionados para análise e sua síntese encontra-se
na Tabela 1.
1995
1997
1998
1999
2000
2001
2001
2002
2002
2004
2005
2005
Furuholt
Wrang et al.
Sheeranet al.
IEA
Armstrong e
Akhurst
Berr et al.
Hackney e
Neufville
Kadam
Kreith et al.
HU et al
Wang et al
Collela et al
Aplicação da
técnica
Aplicação
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
USA
China
China
EUA
Índia
EUA
Gasolina, gasolina
reformulada, óleo
diesel, M85, E85,
M100, E100, GLP,
GNC, GNL, HC,
eletricidade
ICV
Parcial ICV
Parcial ICV
Parcial: ICV
Gasolina, oleo diesel,
hidrogênio
Metanol, gasolina e
hidrogênio
E85, gasolina
GNC, HC, óleo diesel
GTL, M100,
eletricidade
Completa: 4 fases E10
do ACV
Parcial: ICV
Comparação
Comparação
Comparação
Comparação
Desenvolver
produto
Comparação
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
Produzir
deslocamento
Comparação
Comparação
Comparação
Austrália Completa: 4 fases Gasolina Premiun sem Comparação
da ACV
enxofre, E85, E10,
GLP, GNC, GNL,
B100, diesool, óleo
diesel e óleo diesel
GTL
Gasolina, óleo diesel,
GLP, GNC, M100,
E100, B100, HC,
eletricidade
Gasolina, óleo diesel,
GLP, GNC, M100,
E100, B100, HC,
DME
B100, B20 e óleo
diesel
E85, E10 e gasolina
Produzir
deslocamento
Função
Produzir
deslocamento
Não divulga
Parcial: ICV
Parcial - ICV e
interpretação
Parcial: ICV e
interpretação
Comparação
Propósito
Objetivo
Comparação
CE
CE
EUA
EUA
Noruega Completa: 4 fases Gasolina, gasolina
da ACV
com MTBE e óleo
diesel
Ano Local
Autores
1o nivel e 2o nível
Não especifica
Não especifica
1o nível
1o nível
1o nível
1o nível
1o nível
1o nível
1o nível
1o nível
1o nível
Largura
Energia, CO 2
Suprimento 1 e uso final
Médio prazo
Valores médios
nacionais e
internacionais
Valores médios
nacionais
Energia, CO 2, CO, HC, Curto prazo
NO x, MP, SOx e
custos
Energia, CO 2, CO, HC, Curto prazo
NO x, MP, Sox, CH4
Cadeia de suprimento e
uso final
Valores médios
nacionais
Valores médios
nacionais
Valores médios
nacionais
Cadeia de suprimento e
uso final
Curto prazo (ano do
estudo)
Curto prazo (ano do
estudo)
Médio prazo (12 anos
de vida dos veículos)
Valores médios
nacionais e
internacionais
Energia
Energia, CO2, CO,
NO x, SOx, HC e MP
Energia, CO 2, NO x,
HCNM, MP
Valores médios
nacionais
Valores médios dos
países da CE
Energia, CO 2, CO, HC, Curto prazo
NO x, MP e custos
Cadeia de suprimento e
uso final
Cadeia de suprimento e
uso final
Cadeia de suprimento e
uso final
Cadeia de suprimento e
uso final
Valores médios
nacionais e
internacionais
Valores médios
nacionais e regionais
Curto prazo (1 a 5
Valores médios dos
anos) e longo prazo (15 países da OECD.
a 25 anos)
Energia, GEE e
Curto prazo
poluentes atmosféricos
locais
Energia, CO 2, NO x,
CO, HC, MP
Cadeia de suprimento e
uso final
Curto prazo (ano do
estudo) e longo prazo
(não definido)
Dados proprietários
Curto prazo (ano do
estudo)
Abrangência
Geográfica
Temporal
Escopo
Energia, GEE,
Curto prazo (ano do
poluentes atmosféricos estudo)
locais
Energia, CO 2, CH 4,
N 2O
Energia, CO 2, NO x,
SOx, COV
Profundidade
Cadeia de suprimento e
uso final
Cadeia de suprimento e
uso final
Cadeia de suprimento e
uso final
Cadeia de suprimento
Comprimento
Dimensões
Btu/milha
Tecnologia usual na data 1 ano de
do estudo
operação
Tecnologia usual na data 200.000 km
do estudo
Tecnologia usual na data 200.000 km
do estudo
Tecnologia usual na data Não divulga
do estudo
Tecnologia usual na data 1 tonelada de
do estudo
bagaço seco
Tecnologia usual na data Energia em 12
do estudo
anos de vida do
veículo
Tecnologia usual na data g/t.km
do estudo
Tecnologia usual na data MJ/km
do estudo
Tecnologia usual na data GJ
do estudo
Tecnologia usual na data bhp-h
do estudo
Aprimoramento
tecnológico para a
produção do etanol no
longo prazo
Não considera
5 categorias 2
Categoria de
Impactos
Não considera
Não considera
Não especifica
Não especifica
Não especifica
Não especifica
Não especifica
Não considera
Não considera
Não considera
Não considera
6 categorias 3
Equivalente mássico Não considera
Equivalente
Não considera
energético e mássico
Não especifica
Não especifica
Equivalente mássico Não considera
Não especifica
Equivalente
energético
Critério
Unidade
Funcional de Alocação
Tecnologia usual na data litros
do estudo
Tecnológica
202
Transporte em Transformação XI
Tabela 1: Síntese das referências selecionadas sobre aplicação de ACV as fontes
de energia para o transporte rodoviário.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
203
Legenda: EUA – Estados Unidos; CE – Comunidade Européia; MTBE – metil-terci-butil-éter; EX – mistura
com X% de etanol e 100-X% gasolina, MX – mistura com X% de metanol e 100-X% de gasolina; BX –
mistura com X% de biodiesel e 100-X% de óleo diesel; GLP – gás liqüefeito de petróleo, GNC – gás natural
comprimido, GNL – gás natural liqüefeito; HC – hidrogênio comprimido; DME – di-metil-éter; GTL – gas to
liquid. Notas: 1 – O trabalho não deixa claro quais são os estágios da cadeia de suprimento para cada alternativa;
2 – Consumo de combustível fóssil, aquecimento global, oxidantes fotoquímicos, acidificação e geração de
resíduos sólidos; 3 – Consumo de combustível fóssil, aquecimento global, acidificação, eutrofização, toxidade
humana e odor do ar; ICV – Aplicação parcial da ACV, considerando apenas as fases de objetivo e escopo e
análise do inventário.
3. Proposta de Procedimento
A partir dasDE
referências
bibliográficas selecionadas propõe-se um procedimento
3. PROPOSTA
PROCEDIMENTO
A partirnadastécnica
referências
propõe-se
um procedimento
baseado de
baseado
de bibliográficas
ACV para selecionadas
uma primeira
abordagem
na comparação
na
técnica
de
ACV
para
uma
primeira
abordagem
na
comparação
de
alternativas
de
fontes
alternativas de fontes de energia para o transporte sob a óptica do consumo de
energia.
de energia para o transporte sob a óptica do consumo de energia. A Figura 1 apresenta o
A Figura
1
apresenta
o
esquema
do
procedimento
e
baseia
a
discussão
a
seguir.
esquema do procedimento e baseia a discussão a seguir.
REFERÊNCIA
REFERÊNCIA
SP1 11 SPSP
SP
SP2 22 SPSP
SP
SP
3 33
FE1 11
FE
FE
PROPÓSITO
PROPÓSITO
FUNÇÃO
FUNÇÃO
...
......
FE2 22
FE
FE
OBJETIVO
OBJETIVO
APLICAÇÃO
APLICAÇÃO
SP
SP
SPSP
m-1 SP
m
m-1
mm
(1)
(1)
(1)
...
......
FE3 33
FE
FE
(FE
(FE
,SP
)
(FE
11,SP
1,SP
1) 1
MCV
MCV
1 1
(FE
)
(FE
2,SP
2,SP
2) 2
MCV
MCV
2 2
(FE
)
(FE
3,SP
3,SP
3) 3
...
......
(2)
(2)
(2)
(7)(7)
... ...
(FE
(FE
))
3,SP
3,SP
m-1m-1
(3)
(3)
(3)
FEn-1n-1
FE
FE
n-1
... ......
FE
FEn nn
FE
... ......
... ......
... ...
... ......
......
...
......
...
TEMPORAL
TEMPORAL
MCV
MCV
4 4
... ...
(FE
,SP
(FE
,SP
n-1n-1
1) 1)
MCV
MCV
k-1k-1
(FE
(FE
n,SP
m)m)
n,SP
MCV
MCV
k k
(5)(5)
(4)(4)
GEOGRÁFICA
GEOGRÁFICA
MCV
MCV
3 3
TECNOLÓGICA
TECNOLÓGICA
(7)(7)
[F][F]
1 1
ICV
ICV
1 1
[F][F]
2 2
ICV
ICV
2 2
[F][F]
3 3
ICV
ICV
3 3
[F][F]
4 4
ICV
ICV
4 4
... ...
ICV
ICV
k-1k-1
[F][F]
k-1 k-1
[F][F]
k k
ICV
ICV
k k
A1A1
A2A2
A3A3
A4A4
... ...
Ak-1
Ak-1
AkAk
[F’][F’]
1 1
[F’][F’]
2 2
CC
RR
(8)(8)
[F’][F’]
3 3
[F’][F’]
4 4
[F’][F’]
k-1 k-1
[F’][F’]
k k
(6)(6)
DIMENSÕES
DIMENSÕES
BANCO
DEDE
BANCO
DADOS
DADOS
ABRANGÊNCIA
ABRANGÊNCIA
ESCOPO
ESCOPO
ETAPA
ETAPA1 1
ETAPA
DODO
ETAPA2 2 ANÁLISE
ANÁLISE
INVENTÁRIO
INVENTÁRIO
FASE
FASE1 1
FASE
22
FASE
AVALIAÇÃO
AVALIA ÇÃO
DOS
DADOS
DOS
DADOS
COMPARAÇÃO
COMPARAÇÃO
DOS
DOS
RESULTADOS
RESULTADOS
FASE
4 4
FASE
3 3
FASE
FASE
Legenda - (1) Fontes de energia para transporte; (2) Comparar alternativas; (3) Produzir deslocamento; (4) Dados de restrição e
relacionamento;
(5) Limites
do sistemapara
de produto;
(6) Dados
o inventário;
(7) Dados para
(8) Dados para
Legenda
- (1) Fontes
de energia
transporte;
(2) para
Comparar
alternativas;
(3) reavaliação;
Produzir deslocamento;
(4)
comparação; FE: Fonte de energia; SP: Sistema de propulsão; MCV: Modelo de Ciclo de Vida; ICV: Inventário de Ciclo de Vida; [F]:
Dados
de restrição
relacionamento;
Limites
sistema
de produto;
(6)avaliados
Dadosdopara
inventário;
Matriz
de fluxos doe ICV;
A: Avaliação da(5)
qualidade
dosdo
dados;
[F’]: Matriz
de fluxos
ICV;o C:
Comparação(7)
dosDados
R: Relatório
de resultados.
pararesultados;
reavaliação;
(8) Dados
para comparação; FE: Fonte de energia; SP: Sistema de propulsão; MCV: Modelo
Figura
1: Estrutura
dode
procedimento
de Ciclo de Vida; ICV: Inventário de Ciclo
de Vida;
[F]: Matriz
fluxos do ICV; A: Avaliação da qualidade dos
dados; [F’]: Matriz de fluxos avaliados do ICV; C: Comparação dos resultados; R: Relatório de resultados.
3.1. FASE 1: Objetivo e escopo
O objetivo desdobra-se
em aplicação
aos ciclos
de vida das fontes de energia para o
Figura
1: Estrutura
do procedimento
transporte, propósito de comparar alternativas e função de produzir deslocamento. Na
ETAPA 1 do escopo, a consideração de limites para a abrangência geográfica, temporal e
tecnológica restringe e relaciona as fontes de energia (FE), associadas à cadeias de
suprimento e os sistemas de propulsão (SP), associados ao uso final. Cada par (FE, SP)
deve ser caracterizado de modo tão específico e detalhado quanto necessário. Na ETAPA
2 do escopo, para cada par (FE, SP) são associados modelos de ciclo de vida (MCV) que
204
Transporte em Transformação XI
3.1. FASE 1: Objetivo e escopo
O objetivo desdobra-se em aplicação aos ciclos de vida das fontes de
energia para o transporte, propósito de comparar alternativas e função de produzir
deslocamento. Na ETAPA 1 do escopo, a consideração de limites para a abrangência
geográfica, temporal e tecnológica restringe e relaciona as fontes de energia (FE),
associadas à cadeias de suprimento e os sistemas de propulsão (SP), associados
ao uso final. Cada par (FE, SP) deve ser caracterizado de modo tão específico e
detalhado quanto necessário. Na ETAPA 2 do escopo, para cada par (FE, SP) são
associados modelos de ciclo de vida (MCV) que estabelecem as dimensões da
aplicação e os fluxos a serem considerados. Recomenda-se uma estrutura modular
para elaboração dos MCV (Figuras 2 e 3), com três níveis de profundidade, na
forma de macro-estágios, meso-estágios e micro-estágios, que permite a prática de
refinamentos sucessivos, garantindo equivalência entre os níveis. Como os microestágios são específicos para cada ciclo de vida, recomenda-se que a comparação de
alternativas se faça no nível de meso-estágios, onde se consegue melhor equidade.
Quanto à largura, inicialmente recomenda-se considerar o nível 1 (insumos
e cargas ambientais diretamente associadas aos processos). Refinamentos podem
ser obtidos considerando-se os níveis 2 e 3. Sob a ótica do consumo energético
é comum que sejam considerados para cada processo os fluxos de energia total
(ET); energia de origem renovável (ER) e gases de efeito estufa (GEE) oriundos do
consumo de energia.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
MACROESTÁGIOS
MESOESTÁGIOS
USO
FINAL
CADEIA DE
SUPRIMENTO
PRODUÇÃO DE
MAT ÉRIA-PRIMA
PRODUÇÃO DA
FONTE DE ENERGIA
TRANSPORTE DE
MAT ÉRIA-PRIMA
INTERNACIONAL
PRODUÇÃO DE
ETANOL ANIDRO
EXPLORAÇÃO
PRODUÇÃO
BT1
E1
DISTRIBUIÇÃO DA
FONTE DE ENERGIA
BC2
BC1
BD1
E2
TR1
BD2
E4
BC3
USO
FINAL
TR2
TM
MICROESTÁGIOS
205
BT2
E5
BA1
CD1
CA1
REFINO
PROCESSAMENTO
NACIONAL
EXPLORAÇÃO
PRODUÇÃO
BT3
E3
BT4
CT1
Legenda
Petróleo
Gasolina C
Gasolina A
Etanol anidro
Gás natural
BA: bombeio para abastecimento; BC: bombeio para carregamento; BD: bombeio para descarregamento;
BT: bombeio para transporte por duto; E: estoque; TM: transporte marítimo; TR: transporte rodoviário; CT:
compressão para transporte por duto; CD: compressão para distribuição por duto; CA: compressão para
abastecimento.
Figura 2: Modelos de Ciclo de Vida (MCV) da gasolina C
e do gás natural comprimido.
206
Transporte em Transformação XI
MACROESTÁGIOS
MESOESTÁGIOS
USO
FINAL
CADEIA DE
SUPRIMENTO
PRODUÇÃO DE
MAT ÉRIA-PRIMA
TRANSPORTE DE
MAT ÉRIA-PRIMA
PRODUÇÃO DA
FONTE DE ENERGIA
DISTRIBUIÇÃO DA
FONTE DE ENERGIA
DISTRIBUIÇÃO
DE GASOLINA C
PRODUÇÃO DE
INSUMOS
AGRÍCOLAS(1)
BC4
MICROESTÁGIOS
SUPRIMENTO
DE INSUMOS
AGRÍCOLAS(2)
TR3
AGRICULTURA (3)
CR
PRODUÇÃO
TR4
BD3
E6
BC5
TR5
E7
Legenda
USO
FINAL
Cana-de-açúcar
Etanol anidro
BA2
Etanol hidratado
BA: bombeio para abastecimento; BC: bombeio para carregamento; BD: bombeio para descarregamento; CR:
carregamento; E: estoque; TR: transporte rodoviário. Notas - (1): Energia embutida em mudas = 5,87 MJ/
tc ; fertilizantes = 66,49 MJ/tc; calcário = 7,14 MJ/tc; herbicidas = 11,26 MJ/tc e inseticidas = 0,79 MJ/tc
(Nogueira, 1987; CTC, 2003); (2): Óleo diesel para transporte de mudas, fertilizante orgânico e químico no
valor de 8,2 ± 0,8 MJ/tc (CTC, 2003); (3): Preparação do solo, plantio e colheita mecanizada.
Figura 3: Modelo de Ciclo de Vida (MCV) do etanol hidratado (EH) e anidro.
3.2. FASE 2: Análise do inventário
Realiza-se a coleta de dados para cada um dos MCV resultantes da FASE 1,
ao que se denomina inventário de ciclo de vida (ICV). Numa pesquisa preliminar
quantificam-se os dados com pouca preocupação quanto a qualidade, promovendo
refinamentos sucessivos posteriormente. Como resultado da FASE 2, para cada
MCV associa-se uma matriz [F] de fluxos por processo, que sofrerá avaliação da
qualidade dos dados na FASE 3.
3.3. FASE 3: Avaliação dos dados
O critério de avaliação varia em função da necessidade de cada estudo.
Para uma abordagem preliminar recomenda-se um critério baseado em Maurice
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
207
et al. (2000) que propõe avaliações quanto ao: (1) peso que os fluxos individuais
de insumos e cargas ambientais de cada processo têm em relação aos respectivos
fluxos totais no ciclo de vida (Pmin); (2) intervalo de variação dos valores de cada
fluxo (Tmax)e (3) origem, que pode ser uso específico ou uso geral. Como resultado
da FASE 3 obtém-se uma matriz [F’] de fluxos avaliados por meso-estágio para
cada alternativa.
3.4. FASE 4: Comparação dos resultados
A comparação dos resultados pode seguir diversos critérios, sendo possível a
comparação dos valores de [F’] para cada alternativa entre si ou com uma referência,
fornecendo uma hierarquia, ou a parametrização das alternativas considerando uma
alternativa ou os melhores resultados de cada alternativa como referência.
4. Verificação do Procedimento
A verificação do procedimento será feita por meio da seleção de uma situação
típica, porém não restritiva, de transporte de passageiros no Brasil.
4.1. FASE 1: Objetivo e escopo
Escolheu-se como aplicação os ciclos de vida de fontes de energia para o
transporte por automóvel, o propósito de comparar alternativas e como função o
deslocamento de passageiros. Decorre da função a escolha da unidade funcional de
1 pass.km.
4.1.1. FASE 1 – ETAPA 1 - Abrangência
Adotou-se como abrangência geográfica o transporte urbano no Município do
Rio de Janeiro, selecionando alternativas de fontes de energia (FE) para um sistema
de propulsão (SP) disponível no mercado no momento presente, com viabilidade
legal, tecnológica, econômica e disponibilidade de dados, conforme Tabela 2. Tal
escolha não limita a aplicação do procedimento e se justifica pelas considerações
apresentadas a seguir.
208
Transporte em Transformação XI
Tabela 2: Caracterização dos pares de alternativas (FE, SP)
Fonte de energia
Nome
Gasolina C
Sigla
Caracterização
GC
Mistura com 85% de gasolina
obtida do refino de petróleo e
25%(1) de etanol anidro obtido
a partir do processamento da
cana-de-açúcar
Gás natural
GNC
comprimido
Etanol
hidratado
EH
Gás natural associado
ao petróleo purificado e
comprimido
Etanol hidratado obtido a
partir do processamento da
cana-de-açúcar
Sistema de propulsão(2)
Nome
Convencional
Bi-combustível
Flexible-fuel
Alternativas
Sigla
Caracterização
SPC
Automóvel(3)
dedicado ao uso
de gasolina C
(GC,SPC)
SPBC
Automóvel(3)
dedicado ao uso
de gasolina C e
adaptado ao uso
de GNC(4)
(GNC,SPBC)
SPFF
Automóvel(3)
capaz de
consumir
gasolina C e/
ou etanol
hidratado(5)
(EH,SPFF)
Notas: (1) Este era o percentual vigente na época da elaboração do artigo, que pode variar entre 20% e 25%
em função de política do governo. (2) Perfil de operação: tráfego urbano com velocidade média do fluxo de
12 km/h, ar condicionado ligado e ocupação média de 1,5 passageiro por veículo (PDT-RJ, 2006); (3) Veículo
pequeno de 1.450 kgf de peso vazio, equipado com motor alternativo de combustão interna de ignição por
centelhamento com 1,6 dm3 de cilindrada e 97 cv de potência máxima e sistema de transmissão mecânico; (4)
Pressupõe predominância do uso de GNC, embora também possa consumir gasolina C; (5) Considera-se que os
veículos flexible-fuel utilizam predominantemente etanol.
Desde 2003 comercializa-se no Brasil veículos flexible fuel, que utilizam
gasolina C e etanol em qualquer proporção de mistura (ANFAVEA, 2006). Entre
1996 e 2005, os automóveis de passageiros representaram 89% das vendas de
veículos que consomem gasolina C e/ou etanol, incluído aqui os automóveis flexiblefuel que responderam por 53% das vendas (ANFAVEA, 2006). Estes veículos
podem ser adaptados para consumo de gás natural comprimido (GNC) assumindo a
configuração bi-combustível. Em 2006, cerca de 4% frota brasileira de automóveis
apresentava esta configuração e o Rio de Janeiro respondia por 42% desta fração,
com a maior frota brasileira movida a GNV (GASNET, 2007).
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
209
4.1.2. FASE 1 – ETAPA 2 - Dimensões
As Figuras 2 e 3 apresentam os MCV adotados para as alternativas da Tabela
2. Numa primeira abordagem, para cada micro-estágio considerou-se: energia total,
energia renovável e emissão líquida (gás emitido na queima do combustível e não
reabsorvido na produção de matéria-prima) de dióxido de carbono (CO2).
Metade do petróleo para suprimento do município do Rio de Janeiro (cerca
de 7 x 106 m3) é proveniente de jazidas on-shore do Oriente Médio e o restante
de jazidas off-shore na Bacia de Campos (ANP, 2003, Medeiros, 2003). Admitese o transporte marítimo do petróleo importado por 8.746 ± 262 milhas náuticas
(Dobson & Beresford, 1989) em navios-tipo de 300.000 TPB; o transporte poçoterminal no Oriente Médio por 145 ± 15 km em oleodutos (Rio Oil & Gas, 2002) e
terminal-refinaria no Brasil em oleoduto por 125 km. O transporte poço-refinaria do
petróleo nacional é realizado exclusivamente em oleoduto por 334 km (Transpetro,
2002). Nos terminais nacionais, o petróleo é mantido aquecido para bombeio
(Petrobras-Conpet, 2003). Após o refino, a gasolina A (sem adição de etanol) é
bombeada por dutos para tanques próximos da refinaria, onde se adiciona 25% de
etanol anidro, produzindo gasolina C. Esta é carregada em caminhões-tipo com
30.000 l de capacidade que a distribuem para postos a distância de 26,23 ± 1,84 km
(Menezes, 2004).
O gás natural associado ao petróleo nacional pode ser reinjetado no poço,
queimado, consumido como energia nas plataformas ou disponibilizado para
uso (ANP, 2003, Petrobras-Conpet, 2003). O gás disponível é transportado em
gasodutos por 452 km até a unidade de processamento (Transpetro, 2002). Após
processamento, é distribuído por uma rede de 638 km de gasodutos até postos
(SEINPE, 2000), onde é comprimido a 220 atm para abastecer os veículos.
Admite-se que todo o etanol consumido no município do Rio de Janeiro
é produzido em São Paulo e transportado em caminhões-tipo com 30.000 l de
capacidade por 697 ± 24 km até a base de distribuição no Rio de Janeiro (UDOP,
2004, Menezes, 2004). A partir deste ponto segue o modelo de distribuição da
gasolina C. A matéria-prima para a produção do etanol é a cana-de-açúcar que é
transportada em caminhões com 23 t de capacidade por 20 ± 5 km até as usinas.
Admite-se colheita mecanizada em 25% da plantação e colheita manual com
carregamento mecanizado no restante.
210
Transporte em Transformação XI
4.2. FASE 2: Análise do inventário
O óleo diesel e o gás natural (GN) consumidos na produção de petróleo e
GN nacional foram obtidos de inventários anuais realizado no período de 1990
a 2003. Como critério de alocação utilizou-se o rateio mássico (0,043 kg GN /
1 kg petróleo). O óleo diesel consumido na exploração e o GN reinjetado foram
alocados exclusivamente ao petróleo, pois têm como finalidade a sua obtenção
(Petrobras-Conpet, 2003). Para o petróleo, os valores obtidos foram: 0,0042 ±
0,0005 tEP/t (exploração) e 154 ± 11 MJ/barril (produção) e para o GN, 2004 ±
140 MJ/t (produção). Para o petróleo importado, adotou-se 0,0075 ± 0,0004 tEP/t
para exploração on-shore e 97 ± 5 MJ/barril para produção. Admite-se o uso de óleo
diesel na exploração e GN na produção (Sheehan et al, 1998).
O bombeio de petróleo nacional (BT2, BT3 e BT4) consome 0,0311 ± 0,0031
kWh/t.km de energia elétrica e (1,79 ± 0,23).10-4 tEP/t para aquecimento nos
terminais (E2 e E3) com óleo combustível e GN (Petrobras-Conpet, 2003). Adotouse 0,0144 ± 0,0007 kWh/t.km de GN para o bombeiro de petróleo no Oriente Médio
(BT1) (Sheehan et al, 1998) e o dado nacional para aquecimento no terminal E1.
Para o transporte marítimo (TM) adotou-se consumo entre 1,543 e 1,637 g/t.milha
de óleo combustível para capacidade entre 328.000 e 347.000 m3. O carregamento
e descarregamento (BC1 e BD1) consomem entre 3,7 e 3,5 t/h de óleo combustível
(Transpetro, 2002, Gabina, 2004).
A série histórica (1990 a 2003) do consumo de óleo combustível, GN, gás
de refinaria, coque e energia elétrica para refino de petróleo e processamento de
GN foi obtida de Petrobras-Conpet (2003). No período de 1999 a 2003 obteve-se
a produção de gasolina A e derivados de ANP (2003), sendo possível calcular a
eficiência energética do processo (89% a 91%) e os balanços de massa e energia (6%
a 8%). Dividiu-se a energia elétrica e o GN consumido pela massa dos derivados do
petróleo e do GN seco e os demais combustíveis apenas pelos derivados de petróleo
(Petrobras-Conpet, 2003). Os valores obtidos foram: 3798 ± 190 MJ/t (gasolina A)
e 509 ± 25 MJ/t (GN).
O carregamento de caminhões para distribuição de gasolina C (BC3) consome
2,32 ± 0,17 MJ/t de energia elétrica (Petrobras-Conpet, 2003; Marques, 2003). Os
valores típicos de eficiência energética para o caminhão-tipo de 30.000 l de capacidade
(TR1 e TR2) variam entre 1,81 e 2,25 km/l (Volvo, 2000) e adotou-se o consumo de
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
211
energia elétrica no abastecimento (BA1) como 0,654 ± 0,033 MJ/m3 (Gilbarco, 2004).
O estoque na base (E4 e E6) e no posto (E5 e E7) não consomem energia.
Os dados de energia elétrica consumida no transporte de GN até o
processamento (CT1) foram obtidos de Petrobras-Conpet (2003) por meio de série
histórica (1990 a 2003) no valor de 30 ± 0,9 MJ/t. Este mesmo valor foi utilizado
como uma aproximação subestimada para a distribuição de GN (CD1), em função da
dificuldade na obtenção de dados específicos. Para compressão para abastecimento
(CA1) adotou-se 1021 ± 94 MJ/t (Petrobras-Conpet, 2003).
Na cadeia de suprimento do etanol admite-se 65 tc/ha (tc = tonelada de canade-açúcar) para a produção de cana-de-açúcar e 85,4 l/tc para a produção de etanol
(Lima e Marcondes, 2002; CTC, 2003). Por uma questão de coerência com os
trabalhos apresentados na Tabela 1 considerou-se a energia embutida nos insumos
agrícolas e seu suprimento, embora se trate de fluxos de 2º nível. A cada 5 anos
a agricultura envolve o cultivo da cana-planta (1 vez), das soqueiras (3 vezes) e
colheita mecanizada (4 vezes), utilizando equipamentos que consomem óleo diesel
e totalizam 25,10 ± 2,25 MJ/tc (CTC, 2003). O consumo de energia para a produção
de matéria-prima totalizou 1807 ± 45 MJ/tEH (tEH = tonelada de etanol hidratado).
O carregamento (CR) e transporte (TR3) de cana-de-açúcar até as destilarias
utiliza carregadeiras e caminhões que consomem óleo diesel em taxas de 16,25 ±
1,62 l/ha e 0,0209 a 0,0231 l/t.km, respectivamente. (CTC, 2003; Ribeiro, 2004). O
consumo de energia para o transporte de matéria-prima totalizou 553 ± 31 MJ/tEH.
Admite-se que toda a energia necessária para a produção de etanol é obtida da
queima de 232 kg/tc de bagaço com PCI de 1650 kcal/kg e eficiência na conversão
de vapor de 78%, produzindo excedente de 8% de bagaço que é considerado como
co-produto pelo potencial de geração de energia elétrica comercializável (Coelho
et al, 1997; Lima e Marcondes, 2002; CTC, 2003). Obteve-se 58% de eficiência
energética do processo, 7% para o balanço de massa, 0,3% para o balanço de energia
e 13.355 ± 668 MJ/tEH.
Por analogia aos cálculos adotados para a gasolina C, obteve-se 519,6 ± 92
MJ/tEH para o carregamento, descarregamento (BC4 e BD3) e transporte rodoviário
da usina até a base de distribuição (TR4) e 48,6 ± 9 MJ/tEH para a distribuição
urbana (BC5 e TR5) e abastecimento (BA2).
212
Transporte em Transformação XI
Para cada sistema de propulsão apresentado na Tabela 2, foram coletados dados de
campo de eficiência para 3 veículos com as características e perfil operacional descritos
nas notas (2) e (3) (Gomes, 2004). Adotou-se posição conservadora, escolhendo-se os
menores valores por alternativa, que foram: 8,76 ± 0,52 km/l para (GC, SPC); 9,47 ±
0,38 km/m3 para (GNC, SPBC) e 5,47 ± 0,27 km/l para (EH, SPFF).
4.3. FASE 3: Avaliação dos dados
A finalidade desta fase é orientar uma possível reavaliação dos dados por
meio da identificação de fluxos críticos. Os parâmetros adotados foram: Pmim=10%
e Tmax=5% (Maurice et al., 2000). Apenas as variações relativas aos fluxos de uso
final para a alternativa (GC, SPC) ultrapassam em 1,022% Tmax estando associadas
aos resultados do levantamento de campo da eficiência energética dos veículos
escolhidos. A consistência dos resultados foi testada por meio de sua comparação
com dados de referências bibliográficas que refletissem a realidade brasileira
(Clauset, 1999; Gerrero, 2003).
4.4. FASE 4: Comparação dos resultados e discussão
Por facilitar a visualização dos resultados, optou-se pela comparação
paramétrica. As Figuras 4, 5 e 6 baseiam a discussão dos principais resultados.
Com exceção da distribuição, a alternativa (EH, SPFF) apresenta os maiores
consumos de energia total por meso-estágios, sendo a energia embutida nos
insumos agrícolas decisiva para tornar o consumo de energia total da produção de
matéria-prima superior em 32% a alternativa (GC, SPC) e 38% a alternativa (GNC,
SPBC). Esta última se privilegia da não consideração do óleo diesel consumido na
exploração do GN associado.
A diferença entre o consumo de energia total para o transporte de matéria-prima
de cada alternativa é função do modo de transporte e do critério de alocação mássica na
conversão da matéria-prima em fonte de energia. O GN é transportado por gasodutos
e o petróleo por oleodutos e navios, modos de maior eficiência energética que o modo
rodoviário, utilizado para a cana-de-açúcar. Adicionalmente, admite-se que uma
pequena fração da massa da cana-de-açúcar, o equivalente a 85,4 l/tc, é transformada
em etanol, enquanto para o petróleo e GN, a menos das pequenas perdas de processo,
a matéria-prima é integralmente transformada em co-produtos comercializáveis.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
Percentual sobre o maior valor
120,00%
100,00%
80,00%
60,00%
40,00%
20,00%
0,00%
Produção MP
Transporte MP
Produção FE
Distribuição FE
Uso final
Ciclo de vida
(GC,SPC)
67,79%
39,77%
27,04%
16,27%
82,88%
64,21%
(GNC,SPBC)
61,80%
3,06%
2,17%
100,00%
95,85%
65,45%
(EH,SPFF)
100,00%
100,00%
100,00%
97,00%
100,00%
100,00%
Legenda – MP: matéria-prima; FE: fonte de energia.
Figura 4: Energia total consumida em cada alternativa
Percentual sobre a energia total
120,00%
100,00%
80,00%
60,00%
40,00%
20,00%
0,00%
Produção MP
Transporte MP
Produção FE
Distribuição FE
Uso final
Ciclo de vida
(GC,SPC)
0,00%
6,63%
54,18%
2,18%
18,31%
21,87%
(GNC,SPBC)
0,00%
100,00%
0,00%
100,00%
0,00%
2,10%
(EH,SPFF)
0,00%
0,00%
100,00%
1,35%
100,00%
93,33%
Legenda – MP: matéria-prima; FE: fonte de energia.
Figura 5: Energia renovável associada a cada alternativa
Percentual sobre o maior valor
120,00%
100,00%
80,00%
60,00%
40,00%
20,00%
0,00%
Produção MP
Transporte MP
Produção FE
Distribuição FE
Uso final
(GC,SPC)
100,00%
37,83%
100,00%
14,71%
84,14%
93,59%
(GNC,SPBC)
98,87%
0,00%
10,31%
0,00%
100,00%
100,00%
(EH,SPFF)
66,65%
100,00%
0,00%
100,00%
0,00%
7,93%
Legenda – MP: matéria-prima; FE: fonte de energia.
Ciclo de vida
Figura 7: Emissões líquidas de CO2 associadas a cada alternativa
213
214
Transporte em Transformação XI
Além de apresentar o menor consumo de energia total, o transporte de GN
utiliza exclusivamente energia renovável (hidrelétrica) e por hipótese não apresenta
emissões líquidas de CO2. Isso não ocorre para as alternativas (GC, SPC), onde
apenas uma pequena parte da energia total é renovável e (EH, SPFF), onde toda a
energia consumida é de origem fóssil (óleo diesel), produzindo emissões líquidas
de CO2 com perfil semelhante ao consumo de energia total.
O consumo de energia total para a produção de etanol é 3,7 vezes maior que
para a gasolina C e 46 vezes maior que para o GN, porém, toda a energia consumida
é biomassa o que leva a inexistência de emissões líquidas de CO2. A maior parte da
energia renovável observada na produção de gasolina C (99%).
O maior consumo de energia total na distribuição ocorre para a alternativa
(GNC, SPBC) e está associado à energia elétrica utilizada na compressão para
abastecimento. A utilização do óleo diesel em transporte rodoviário implica
nas maiores emissões líquidas de CO2 para o etanol este meso-estágio. Para a
distribuição da gasolina C, a energia total e a emissão líquida de CO2 representam,
respectivamente, 16% e 15% das obtidas para o etanol. Esta diferença está associada
ao transporte do etanol até a base de distribuição, uma vez que a partir deste ponto,
o modelo de distribuição é idêntico para as duas alternativas.
Os consumos de energia total para o transporte de matéria-prima e a distribuição
da fonte de energia da alternativa (EH, SPFF) apresentam valores da mesma ordem,
embora o último meso-estágio considere deslocamento muito maior. Este é mais
um reflexo da relação mássica entre a cana-de-açúcar e o etanol que só fica claro
considerando-se toda a cadeia de suprimento.
A alternativa (GC, SPC) apresenta o melhor desempenho para o uso final,
com consumo de energia total 13,5% menor que a alternativa (GNC, SPBC) e 17%
menor que a alternativa (EH, SPFF). Para esta última as emissões líquidas de CO2
são nulas, por se tratar de energia com origem na biomassa. A parcela de etanol
adicionada à gasolina C contribui para a redução da emissão líquida de CO2 em seu
uso final, o que não ocorre para o GNC, responsável pela maior emissão líquida de
CO2 neste meso-estágio.
A parcela do etanol na gasolina C representa 38% de energia renovável na
energia total da cadeia de suprimento da alternativa (GC, SPC), percentual mais
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
215
expressivo que os 18,31% obtido para o uso final e os 21,87% obtidos para o ciclo
de vida. Constatação que só é possível por meio da análise do ciclo de vida.
A alternativa (GC, SPC) é a que apresenta o menor consumo de energia total
para o ciclo de vida, com desempenho semelhante à alternativa (CNG, SPBC) e 36%
melhor que a alternativa (EH, SPFF), sendo que esta última apresenta a vantagem de
utilizar predominantemente energia renovável (93%) e apresentar a menor emissão
líquida de CO2. Porém, os seguintes aspectos devem ser considerados: a fração
de etanol na gasolina C representa uma parcela de energia renovável em todo o
seu ciclo de vida o que não se verifica no GN; o MCV estabelecido para o GN
associado às incertezas nos dados para a distribuição do GN podem ter subestimado
o seu consumo de energia; a alternativa (EH, SPFF) ainda apresenta oportunidades
de melhoria significativas nos meso-estágios de transporte de matéria-prima e
distribuição, indicando a direção de futuros estudos.
Os resultados obtidos representam a realidade brasileira limitada à abrangência
do modelo. Esta situação privilegia as alternativas (GC, SPC) e (GNC, SPBC) pela
proximidade entre o local de produção da matéria-prima, em sua totalidade ou em
parte, e o local de uso final. Tais resultados não devem ser adotados como médias
nacionais, o que implicaria da determinação de outra abrangência.
Para as alternativas (GC, SPC) e (GNC, SPBC) a cadeia de suprimento
consome respectivamente 18% e 7% da energia total do ciclo de vida. Estes valores
são comparáveis com os obtidos por IEA (1999), sendo de 13% a 21% para a
gasolina e de 6% a 13,5% para o GN. No caso da alternativa (EH, SPFF), a cadeia
de suprimento responde por 36,5% da energia total do ciclo de vida, valor bem
inferior a faixa de 50,5% a 92% apresentada por IEA (1999), porém, considerando
etanol produzido a partir de milho e beterraba.
5. Conclusões e Recomendações
O procedimento sugerido apresenta aderência à técnica de ACV, estando
alinhado a prática apresentada na literatura consultada. A adoção de três níveis na
elaboração dos modelos de ciclo de vida (MCV), permite a prática de refinamentos
sucessivos e garante equivalência entre os níveis. A associação de cada fonte de
energia a apenas um sistema de propulsão, racionaliza a coleta de dados e facilita
216
Transporte em Transformação XI
a comparação dos resultados. Os MCV apresentados são aplicáveis a qualquer tipo
de atividade de transporte, bastando para isso que se caracterize adequadamente
o uso final. Com isso, destaca-se a robustez e flexibilidade do modelo em face de
diferentes aplicações.
A aplicação representa uma contribuição para divulgação de conhecimento no
que se refere às fontes de energia para o transporte em países em desenvolvimento,
uma vez que considera dados representativos de uma parte da realidade brasileira,
sendo a comparação das alternativas (GC, SPC) e (GNC, SPBC) com (EH, SPFF)
um estudo inédito.
A identificação da melhor fonte de energia para o transporte rodoviário por
automóveis depende dos aspectos que se pretende valorizar. Se considerado apenas
o menor consumo de energia total, o uso de gasolina C e GNC, nesta ordem, são as
melhores alternativas. Porém, sob a ótica do uso de energia renovável e emissões
líquidas de CO2, para as condições apresentadas, o uso de etanol é imbatível. Os
resultados também destacam a adequação do procedimento em identificar, ao
longo do ciclo de vida de cada alternativa, onde ocorrem vantagens específicas, em
particular no uso de combustíveis renováveis oriundos da biomassa, opção praticada
e interessante para a realidade brasileira.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
217
Referências Bibliográficas
ABNT (2001) NBR – ISO 14040 – Gestão Ambiental – Avaliação do Ciclo de Vida:
Princípios e Estrutura. Associação Brasileira de Normas Técnicas, Rio de Janeiro, RJ.
ANFAVEA (2006) Anuário da Indústria Automobilística Brasileira, www.anfavea.
com.br/anuario2006/Cap02, acessado em 08/02/2007.
ANP (2003) Anuário Estatístico da Indústria Brasileira do Petróleo 1993 – 2002,
Rio de Janeiro, Agência Nacional do Petróleo.
Armstrong, A. P. E Akhurst, M. A. (2000) Alternative Fuels: Well-to-Wheeels Energy Use & CO2 Comparisons, London, BP Amoco.
Beer, T.; Grant T; Morgan, G.; Lapszewicz, J.; Anyon, P.; Edwards, J.; Nelson,
P.; Watson, H. E Williams, D. (2001) “Comparison of Transport Fuels: Life
Cycle Emissions Analysis of Alternative Fuels for Heavy Vehicles”. Final Report EV45A/2/F3C, Australian Greenhouse Office.
Clauset, C. (1999) “Gol 1.6 de cara nova”, Revista 4 Rodas, maio 1999, Editora
Abril, Cultural, São Paulo, pp. 40.
Coelho, S. T.; Oliveira Jr, S.; Zylbersztajn, D. (1997) “Thermoeconomic analysis of
electricity cogeneration from sugarcane origin”. Third Biomass.
Collela, W. G.; Jacobson, M. G. and Golden, D. M. (2005) Switching to a U.S.
hydrogen fuel cell vehicle fleet: The resultant change in emissions, energy use,
and greenhouse gases. Journal of Power Sources 150, 150–181
CTC (2003) Use of Energy in the production of cane, sugar and alcohol and green
house gas emissions: present situation (2002) and future situations (cogeneration with BIG-GT). Centro de Tecnologia Copersucar, Piracicaba.
Culaba, A. B. E Purvis, M. R. I. (1999) “A Methodology for the Life Cycle and
Sustainability Analysis of Manufacturing Processes”, Journal of Cleaner Production, vol 7, pp. 435-445.
Dobson, H E Bersford, A. (1989) Maritime Atlas of Words Ports and Shiping Places, London, Lloyd’s of London Press Ltd.
Gabina, F. De C. (2004) “Dados sobre a frota de petroleiro da Transpetro e sua operação”, Comunicação pessoal, engenheiro naval, FRONAPE – Frota Nacional
de Petroleiros – GETEC, Rio de Janeiro.
GASNET (2007) GNV: Perfil do GNV no Brasil, www.gasnet.com.br/novo_gnv/
perfilgnv/brasil_asp, acessado em 09/02/2007.
Gerrero, L. (2003) “Álcool ou gasolina? Você decide no posto”, Revista 4 Rodas,
ano 43, no 513, Editora Abril Cultural, São Paulo, pp. 36-41.
218
Transporte em Transformação XI
Gilbarco (2004) Linha de produtos Gilbarco, In: www.gilbarco.com.br, acesso em
28/09/2004.
Gômara, R. (2001) “Identificação das características de distribuição de GN para os
postos de serviço”, Comunicação pessoal, sócio da NPR, representante da Aspro GNV fabricante de compressores e dispensers para GNV, Rio de Janeiro.
Gomes, R. (2004) “Dados da frota da empresa Veloz Transrio que operação no Aeroporto Santos Dumont no período de outubro de 2003 a maio de 2004”, Comunicação pessoal, gerente da empresa Veloz Transrio Ltda, Rio de Janeiro, RJ.
Hackney, J. E Neufville, R. (2001) “Life cycle of alternative fuel vehicles: emissions, energy and cost trade-offs”, Transportation Research Part A 35, pp. 243266.
Hanssen, O. J. (1998) “Environmental impacts of product systems in life cycle
perspective: a survey of five produt types based on life cycle assessments studies”, Journal of Cleaner Production, 6, pp. 299 – 311.
Hu, Z.; Pu, G.; Fang, F. and Wang C. (2004) Economics, environment, and energy
life cycle assessment of automobiles fueled by bio-ethanol blends in China. Renewable Energy 29, 2183–2192.
IEA (1999) Automotive Fuels for the Future - The Search for Alternative, International Energy Agency, Office of Energy Efficiency Technology and R&D,
Paris.
Kadam, K. L., 2002, “Environmental Benefits on a Life Cycle Basis of Using Bagasse-derived Ethanol as a Gasoline Oxygenate in India”, Energy Policy, no. 30,
pp. 371 - 384.
Kreith, F. et al. (2002) “Legislative and Technical Perspective for Advanced Ground
Transportation Systems”, Transportation Quarterly, 56, no 1, Winter 2002, p. 51
– 73.
Lima, L. da R. E Marcondes, A. de A., (2002) Álcool carburant: Uma estratégia
brasileira, 1a ed., Curitiba, Editora de UFPR.
Marques, P. S. V. (2003) “Tabela de consumo de energia nas bases da CBPI”, Comunicação por e-mail, engenheiro, Companhia Brasileira de Petróleo Ipiranga,
Seção de Bases e Terminais, Rio de Janeiro.
Maurice, B.; Frischknecht, R.; CoelhoSchwirtz, V. e Hungerbühler, K. (2000) “Uncertainty Analysis in the Life Cycle Inventory. Application to the Production of
Electricity with French Coal Power Plants”, Journal of Cleaner Production, vol.
8, pp. 95-108.
Medeiros, A. (2003) Refino no Brasil, Cadernos Petrobras, agosto/2003, no 3, Unidade de Comunicação Institucional da Petrobras, Rio de Janeiro, pp. 30 – 33.
Procedimento de Análise de Ciclo de Vida para Comparação de
Fontes de Energia para o Transporte no Brasil
219
MME (2007) Balanço Energético Nacional Ano Base 2005, www.mme.gov.br,
BEN 2006, acessado em 07/02/2007.
Menezes, H. L. (2004) “Procedimentos de operação no Núcleo de Caxias (CBPI)”,
Comunicação pessoal, Chefe do Núcleo Caxias, Companhia Brasileira de Petróleo Ipiranga, Base de Distribuição, Duque de Caxias.
PDT-RJ (2006) Plano Diretor de Transportes da Cidade do Rio de Janeiro, Secretaria Municipal de Transportes, Prefeitura da Cidade do rio de Janeiro.
Petrobras-Conpet (2003) Relatório Sobre Conservação de Energia no Sistema Petrobras, C-CONPET, Petrobras, Rio de Janeiro, RJ.
Ribeiro, E. A. C. (2004) Anuário do Transporte de Carga 2004, São Paulo, OTM
Editora Ltda.
Rio Oil & Gas (2002) “Strategies for World Energy”, In: “Official publication of the
17th World Petroleum Congress”, Rio de Janeiro, pp. 158 – 159.
SEINPE (2000) Balanço Energético do Estado do Rio de Janeiro 1980 – 1999, Rio
de Janeiro, Secretaria de Energia, da Indústria Naval e do Petróleo.
Sheehan, J. Et Al. (1998) “Life Cycle Inventory of Biodiesel and Petroleum Diesel
for Use in Urban Bus”, Final Report, National Renewable Energy Laboratory,
Golden Colorado.
Transpetro (2002) Relatório Anual 2001, Rio de Janeiro, Transpetro.
UDOP (2004) Acompanhamento da produção de álcool – Safra 00/01, In: www.
udop.com.br, Boletim II – NNE de 25/10, NO e CSUL de 17/10/00, Usinas e
Destilarias do Oeste Paulista, acesso em 21/09/2004.
Volvo (2000) Estimativa de Custos de Transportes, São Paulo, Volvo do Brasil
S.A.
Wang, M Et Al. (1997) Fuel-Cycle Fossil Energy Use and Greenhouse Gas Emissions of Fuel Ethanol Produced from U.S. Midwest Corn, Centre of Transportation Research, Argone Laboratory.
Wang, C.; Zhou, S.; Hong X.; Qiu, T. and Wang, S. (2005) A comprehensive comparison of fuel options for fuel cell vehicles in China. Fuel Processing Technology 86, 831– 845.
Prof. Márcio de Almeida D´Agosto, DSc.. PET/COPPE/UFRJ; [email protected] (21) 2562-8171
Baixar