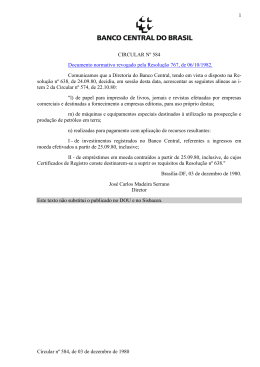
Departamento de Física da Faculdade de Ciências da Universidade de Lisboa T1 FÍSICA EXPERIMENTAL I - 2007/2008 ________________________________________________________________________________________________ MOVIMENTO CIRCULAR UNIFORME – Força centrípeta 1. Objectivos • Verificar a relação entre a força responsável pelo movimento circular, a velocidade e o raio da trajectória. 2. Introdução1 Consideremos uma partícula a descrever um movimento curvilíneo como o representado na fig. 1. No instante t a partícula encontra-se em A e no instante t´ em B; e são os vectores posição relativamente a O dos pontos A e B, respectivamente. Definimos velocidade média no intervalo AB por: ∆ (1) ∆ sendo ∆ é o deslocamento no intervalo de tempo Δt, é pois um vector paralelo a ∆ . Figura 1: Representação do vector velocidade média da partícula no percurso de A a B, é um vector com a . Representação do vector velocidade instantânea num ponto, vector tangente à mesma direcção de ∆ trajectória nesse ponto. A velocidade instantânea é definida como o limite da velocidade média quando ∆ lim∆ Quando ∆ lim∆ ∆ ∆ 0. (2) 0 o ponto B tende para o ponto A e nessa situação ∆ varia continuamente em módulo e direcção, tal como a velocidade média, como se pode ver na fig. 2. No limite ∆ coincide 1 Para além do fundamento do trabalho de laboratório aqui apresentado deve consultar as notas “Medições experimentais” pags. 2-6, 8-14 e 17-22. T1 - Força centrípeta ________________________________________________________________________________________________ com a direcção da tangente à trajectória no ponto A, admitindo que é nesse ponto que estamos a calcular a velocidade instantânea, (3) onde | | e representa o vector unitário da direcção da tangente à curva no ponto considerado. Figura 2: Vectores velocidade média em B e nos pontos B´ e B´´ cada vez mais próximos de A. Esses vectores vão variando em módulo e direcção, no limite em que ∆ corresponde a um ∆ muito próximo de zero . coincide com No movimento curvilíneo a velocidade, em geral, varia em módulo e direcção. A aceleração média é o vector definido por: ∆ (4) ∆ sendo ∆ a variação da velocidade no intervalo de tempo Δt. A aceleração instantânea é definida por, lim∆ ∆ (5) ∆ As acelerações, média e instantânea, estão representadas na fig. 3. . Figura 3: Aceleração no movimento curvilíneo; ∆ é a variação da velocidade no intervalo de tempo Δt. 2(8) T1 - Força centrípeta ________________________________________________________________________________________________ Nestas condições, a aceleração não é colinear com e pode ser decomposta numa componente paralela à velocidade e tangente à trajectória que é responsável pela variação do módulo de , e uma componente normal à velocidade que será responsável pela mudança de direcção desta. (6) um vector unitário paralelo a . Uma partícula sujeita à acção de uma força resultante sendo não nula descreve uma trajectória curvilínea se esta força for não colinear com a velocidade da partícula. Figura 4: Movimento curvilíneo num plano. e são os vectores unitários da tangente e normal à curva no ponto A; φ é o ângulo que a tangente à curva faz com o eixo dos xx; ρ é o raio de curvatura da trajectória no ponto A. Recorrendo à representação da fig. 4 podemos escrever: cos φ sen φ cos φ (7a) sen φ sen φ cos φ (7b) donde cos φ sen Esta relação indica que é normal à curva no ponto A. Além disso, φ onde (8) φ φ (9) AA´ é o pequeno arco percorrido pela partícula no intervalo de tempo . As normais à curva em A e A´ interceptam-se no ponto C, designado centro de curvatura. Introduzindo o raio de curvatura ρ = CA, podemos escrever ou . No caso do movimento circular o raio de curvatura ρ é o mesmo em todos os pontos, ρ é o raio R do círculo e as componentes da aceleração no movimento circular vêm: 3(8) T1 - Força centrípeta ________________________________________________________________________________________________ | | | (10) | v=wR v at a an an=v /R 2 C Figura 5: Representação da velocidade e das componentes tangencial movimento circular. Se é constante a componente tangencial é nula. e normal da aceleração para o As componentes das forças que actuam na partícula são assim: (11) Define-se movimento circular uniforme como um movimento uniforme (| | constante) em que a trajectória descrita é circular. Assim, a velocidade varia em direcção e sentido, sendo não nula a componente da aceleração normal à velocidade. Para que um corpo tenha este tipo de movimento, a resultante das forças que nele actuam é não nula, normal à trajectória e aponta para o interior desta (força centrípeta) (12) sendo 3. dφ/dt a velocidade angular do corpo. Para resolver antes da aula de realização do trabalho 1) O que é um movimento uniforme? 2) Qual é, em unidades SI, a velocidade linear de um corpo que roda com uma frequência de 100 rotações por minuto no extremo de um fio de 40 cm? 3) Se e e a forem medidos com incertezas Δ e Δa, respectivamente, qual é a incerteza ΔR associada a R? 4(8) T1 - Força centrípeta ________________________________________________________________________________________________ 4. Realização experimental Material Sensor de força, detector de presença ligado à interface de um computador, multímetro, motor de velocidade regulável, corpo cilíndrico, fio, calha e roldana na montagem “Força centrípeta”. Descrição da montagem Neste trabalho vai estudar o movimento circular uniforme de um corpo de massa m. O esquema da montagem está representado na fig. 6. O corpo de massa m sobre uma calha, está ligado por um fio, que passa por uma roldana, a um ponto fixo O. Um motor de velocidade regulável faz girar o sistema corpo e calha com uma frequência angular constante em torno de um eixo vertical que passa por O. A força responsável por este movimento, devida à tensão do fio, é medida por um sensor de força ao qual o fio está ligado. Sensor de força O Detector de presença R m a l Palheta Calha Figura 6: Representação esquemática da montagem experimental para verificar a relação entre a força responsável pelo movimento circular, a velocidade e o raio da trajectória. Este sensor de força opera numa gama de – 50 N a + 50 N o que corresponde, à saída, a diferenças de potencial entre – 8 V e + 8 V. Contudo, na presente experiência nunca serão aplicadas ao corpo velocidades que originem respostas do sensor de força superiores, em valor absoluto, a 0.3 V. Um detector de presença de objectos, ligado à interface de um computador, permite medir o período do movimento circular (através dos tempos de passagem de uma palheta solidária com a calha) cujo valor é registado utilizando o “software” adequado (DataStudio, opção sensor: temporizador da fotoporta). 5(8) T1 - Força centrípeta ________________________________________________________________________________________________ Realização e análise dos dados 1. Cada aluno faz, com a craveira, uma medição do comprimento do corpo de massa m que se encontra na extremidade do fio. Tomam a média das medições e apresentam o resultado na forma a ± Δa. A incerteza Δa é o maior valor de entre: o maior desvio relativamente à média e a incerteza associada ao instrumento de medida. 2. Com o fio esticado meça o comprimento l do fio e obtenha o valor do raio da trajectória ∆ que irá ser descrita pelo corpo. 3. Ligue o sensor de força à fonte de alimentação e regule, com a ajuda de um multímetro, o valor da tensão de alimentação do sensor para 12 V. Uma vez feito este ajuste deve retirar o multímetro. 4. Ligue a saída do sensor de força ao multímetro o que lhe permitirá, posteriormente, medir a resposta do sensor e obter o valor da força responsável pelo movimento. Para conhecer o valor da força deve usar a relação 8 V ÅÆ 50 N. ATENÇÃO! – Antes de ligar o interruptor do controlo do motor, certifique-se de que o potenciómetro está na posição correspondente à velocidade mínima e, depois de ligado, aumente gradualmente a velocidade de rotação até ao valor pretendido. Do mesmo modo, antes de desligar o motor, reduza a sua velocidade. COM O MOTOR LIGADO NUNCA COLOQUE AS MÃOS DENTRO DA REGIÃO PROTEGIDA! 5. Com o interruptor de controlo do motor desligado carregue no botão “tare” do sensor de força para ajustar o zero da força. 6. Utilizando o motor ponha o corpo a rodar. Não aplique ao corpo velocidades que originem respostas do sensor de força superiores, em valor absoluto, a 0.3 V. Utilizando o software adequado inicie a aquisição dos valores do período do movimento. Seleccione a opção que lhe permita conhecer automaticamente o valor médio. Registe2 o valor médio T do período do movimento. Registe o ponto médio do intervalo de valores da resposta V do sensor. 7. Construa na folha de cálculo uma tabela3 com os valores experimentais (T,V) tendo o cuidado de indicar a precisão com que são medidos. Na mesma tabela introduza uma coluna com o 2 Os registos feitos na sequência de uma medição devem indicar os dígitos que a resolução do aparelho de medida permite sendo o dígito mais à direita que registamos o único dígito afectado pela incerteza experimental. 3 As regras de apresentação de uma tabela são sempre regras de bom senso. Devem permitir identificar claramente as grandezas medidas, unidade e a precisão com que foram tomadas as medidas, sem conter informação repetida. Por exemplo: 1) não criar uma coluna em que todos os valores são iguais, esses dados podem fazer parte do informativo da tabela sob a forma de cabeçalho ou nota por baixo da tabela; 2) não repetir em todas as leituras a unidade em que foram feitas as medições, essa informação deve estar ao cimo da coluna juntamente com o símbolo da grandeza medida. A 6(8) T1 - Força centrípeta ________________________________________________________________________________________________ cálculo do quadrado da velocidade angular ω2 e outra coluna onde, a partir dos valores da resposta V e utilizando o factor de conversão 8 V ÅÆ 50 N, obtém a força F de tensão no fio. 8. Repita os passos 5 e 6 para dez valores da força de tensão diferentes. 9. Represente o corpo m e as forças a que fica sujeito no seu movimento circular e indique qual a resultante dessas forças. Qual é então a força responsável pelo movimento circular? 10. Construa na folha de cálculo um gráfico4 onde relaciona a força responsável pelo movimento com o quadrado da velocidade angular. Que tipo de relação existe entre a força responsável pelo movimento circular e o quadrado da velocidade angular? Escreva a expressão geral dessa relação. 11. Utilize as facilidades gráficas da folha de cálculo para obter rapidamente a equação da recta (Y=AX) que melhor se ajusta5 ao conjunto de pontos experimentais. 12. Vai agora utilizar a folha de cálculo para fazer, passo a passo, os cálculos necessários à determinação, pelo método dos mínimos quadrados, do parâmetro A da recta Y =AX que melhor se ajusta aos pontos experimentais , . 13. Verifique que não se enganou comparando o valor que obteve para A no passo anterior com o valor que já tinha obtido no passo 11, para o mesmo parâmetro. Note que o programa de gráficos utiliza o mesmo método para obter os parâmetros da recta. 14. Sendo o movimento circular, a força responsável pelo movimento deverá ter as características de uma força centrípeta Fc. Explicite a relação Fc = f(ω2). A que grandeza deve então ser igual o declive A da recta ajustada? No seu caderno esboce o gráfico Fc = f(ω2) para dois valores R1 e R2 do raio da trajectória (R2>R1). 15. Compare a medida experimental directa da massa do corpo com a determinação que pode fazer com base no declive da recta ajustada. Há ou não acordo entre os resultados dentro do limite da incerteza das determinações experimentais? mesma tabela pode conter grandezas medidas directamente e outras indirectamente a partir daquelas, utilize a folha de cálculo para estabelecer estas relações e construir a tabela. 4 A representação gráfica dos valores obtidos é, em muitas situações, uma ferramenta de trabalho indispensável, quer porque nos pode permitir conhecer o tipo de relação entre duas grandezas: linear, quadrática, exponencial, .... , quer porque, admitindo conhecida a relação entre aquelas duas grandezas, nos permite conhecer outras grandezas físicas envolvidas. Um gráfico é também um meio poderoso para, de uma forma rápida, transmitirmos a informação mais relevante de um determinado processo. Destas premissas advêm os cuidados que devemos pôr no seu traçado. Em cada um dos eixos deve aparecer claramente a grandeza e a unidade em que está expressa, além de uma escala de leitura fácil (note-se que é só uma escala, não pretende dar informação sobre os algarismos significativos das medições, essa informação consta da tabela). Um outro aspecto muito importante: os pontos experimentais são um elemento fundamental do gráfico, portanto, eles não podem ficar encobertos por qualquer linha, mesmo o traçado correspondente a uma função fisicamente significativa ajustada aos pontos experimentais, deve ser feito em traço fino de forma a respeitar a visualização dos pontos experimentais. 5 Matematicamente, o método para encontrar os parâmetros A e B da recta que melhor se ajusta aos pontos experimentais (Xi,Yi), no pressuposto de que entre as grandezas X e Y se pode estabelecer uma relação linear, é o método dos mínimos quadrados. Encontra as bases deste método em “Medições experimentais” pags. 17-19. 7(8) T1 - Força centrípeta ________________________________________________________________________________________________ 16. Foram alcançados os objectivos a que nos propusemos? Justifique a sua resposta. 8(8)
Baixar