Robótica Pedagógica e Currículo
João Vilhete Viegas d’Abreu1, Maria de Fátima Garcia2
1
Núcleo de Informática Aplicada à Educação – NIED/UNICAMP
Caixa Postal 6082 – Unicamp – CEP: 13083-970 – Campinas –SP – Brasil
2
Universidade Federal do Rio Grande do Norte - UFRN
{João Vilhete} [email protected], Maria de Fátima Garcia
[email protected]
Abstract. This paper discusses pedagogical robotic and curriculum approach
that is based in performing simple activities of robotic, through
implementation of projects and interdisciplinary character, resulting in the
integration of robotic in the school curriculum. The use of robotic as a
pedagogical tool for teaching and learning is turning into a practice that over
the years has been gaining ground in many schools in different school levels.
Being interdisciplinary, this process involves the use of context and build in
the school learning situations that involve different areas of knowledge. The
article discusses this process of creation.
Resumo. Este artigo discute a robótica pedagógica e currículo numa abordagem
que se sustenta na realização de atividades simples de robótica, passando pela
implementação de projetos de caráter interdisciplinar e, desembocando na
integração da robótica ao currículo escolar. A utilização da robótica pedagógica
como ferramenta de ensino-aprendizagem tem se constituído em uma prática que
ao longo dos anos vem conquistando espaço em muitas escolas em diferentes níveis
de ensino. Por ser de caráter interdisciplinar, esse processo de utilização implica
em contextualizar e construir no ambiente escolar situações de aprendizagens que
envolvem diferentes áreas de conhecimento. O artigo discute esse processo de
criação.
Palavras-chave
Robótica Pedagógica, Interdisciplinaridade, Currículo, Pós-graduação
1. Introdução
Desenvolvimento de atividades de robótica pedagógica envolvem, pelo menos, a
concepção, implementação construção, automação e controle do dispositivo
desenvolvido. Algumas vezes, dependendo da situação de uso proposta, ainda se faz
necessário estabelecer critérios para manipulação e utilização do dispositivo com
finalidades educacionais. Nesse cenário, que se aplica a qualquer condição de realização
de atividades na área de robótica pedagógica, cabe a utilização de diversos tipos de
materiais quer sejam eles de padrão comercial ou não. O mais importante, no caso, é
proposta pedagógica a ser elaborada, para que a prática da aprendizagem aconteça num
contexto em que diferentes conteúdos curriculares podem ser trabalhados, de maneira a
propiciar efetivamente, de forma interdisciplinar, o manuseio de conceitos científicos
(D’ABREU, 2002). Por exemplo, para se estudar as estratégias utilizadas pelos alunos
para resolver problemas, quanto o aprendizado de conceitos, exige-se dentre outras
tarefas, interagir com os mesmos de forma individual, em pequenos grupos e também
coletivamente e a partir daí, no processo, coletar, analisar e tratar informações utilizando
principalmente apontamentos de cadernos desses alunos. Essas informações uma vez
organizadas e tratadas evidenciam um conjunto de atributos e características que ajudam
a explicitar fenômenos presentes no processo de aprendizagem desses alunos
(D’ABREU et al, 2002). Este artigo discute a robótica pedagógica numa abordagem que
se sustenta na realização de atividades simples de robótica, passando pela
implementação de projetos de caráter interdisciplinar e, desembocando na integração da
robótica ao currículo escolar. Esta abordagem se constitui em uma prática que tem sido
utilizada, pelos autores deste trabalho, envolvendo a utilização da robótica pedagógica
tanto em contextos de educação regular quanto da educação especial.
2. O que é a Robótica Pedagógica
No contexto de ensino-aprendizagem a robótica pedagógica pode ser entendida como
um processo de interação com um dispositivo robótico mecânico/eletromecânico, que
via de regra, pode ser um robô, como forma de favorecer os processos cognitivos.
Portanto, um processo conciliatório entre o concreto e o abstrato na resolução de um
problema que envolve etapas como: concepção, implementação, construção automação
e controle de um mecanismo. Em todas estas etapas pode e deve ocorrer a construção de
conhecimento. Conhecimento esse advindo das mais diferentes áreas científicas. Um
ambiente de robótica pedagógica deve fazer emergir, no contexto escolar de
aprendizagem, ideias tecnológicas para permitir que as crianças se apropriem delas
(PAPERT, 1994). Nesse contexto entende-se como ideias tecnológicas as possibilidades
de conexão de peças mecânicas e de componentes eletrônicos, nos mecanismos
robóticos, para realização de uma determinada tarefa.
Um ambiente de robótica pedagógica pressupõe a existência de professor, aluno e
ferramentas que propiciam a montagem, automação e controle de dispositivos
mecânicos. Alunos e professores interagindo entre si e com essas ferramentas produzem
novos conhecimentos caracterizando esse ambiente como um ambiente pedagógico que
não existe a priori. Desse cenário podem fazer parte dispositivos como montagens
LEGO, manipulador robótico, robô móvel, tartaruga mecânica de solo, traçador gráfico
educacional, dentre outros. Além disso, um outro desdobramento da utilização da
robótica pedagógica, que tem sido desenvolvido nos últimos anos, é a sua aplicação
junto aos alunos com deficiência. Nesse contexto pode-se citar dois projetos, ambos
financiados pela Fundação de amparo à Pesquisa do estado de São Paulo- FAPESP,
sendo o primeiro, “Desenvolvimento de Dispositivos Robóticos Integrando o Estudo
de Cartografia Tátil e Geração de Material Didático para Portadores de
Deficiência Visual” (D’ABREU e CHELLA 2006). Segundo, “Orientação Espacial
no Campus da Unicamp: Desenvolvimento de um Mapa de Uso Tátil e Sonoro” O
primeiro deles foi desenvolvido em uma escola especial onde à robótica pedagógica foi
utilizada junto aos alunos com deficiência auditiva, visual e com baixa visão no
município de Araras, SP. O segundo está atualmente em andamento (período de
execução 2009-2011), numa parceria entre o Núcleo de Informática aplicada à Educação
– NIED e a Faculdade de Engenharia Civil, Arquitetura e Urbanismo, ambos da
Unicamp. Este segundo projeto consiste na utilização da robótica pedagógica no
desenvolvimento de um instrumento de leitura tátil e sonoro, que atue como facilitador
para o percurso de indivíduos com deficiência visual. Os dois exemplos citados são
projetos de pesquisa que apontam para um uso mais abrangente da robótica pedagógica
onde o grande desafio está na inclusão social e digital de pessoas com deficiência. Ou
seja, contribuir com a demanda da inclusão social espacial referente ao ambiente físico e
arquitetônico, por meio de uso didático e pedagógico de um dispositivo robótico que é o
mapa tátil sonoro.
3. Robótica Pedagógica e Currículo
De acordo com Sacristán “o currículo não é um conceito, mas uma construção cultural.
Isto é, não se trata de um conceito abstrato que tenha algum tipo de existência fora e
previamente à experiência humana. É, antes, um modo de organizar uma série de
práticas educativas”. (GRUNDY apud SACRISTÁN, 2000). Assim, a robótica
pedagógica articula-se ao currículo porque, na sociedade atual, as tecnologias
computacionais da informação e da comunicação fazem parte da cultura e as escolas não
podem prescindir de sua inserção nas práticas curriculares cotidianas.
Atualmente os educadores não mais pensam o currículo associado apenas a
procedimentos, grades curriculares fixas e métodos de ensino. O currículo, nos discursos
da educação, é entendido de forma relacional, multireferencializado, como um artefato
de poder, constituinte de subjetividades. Caminha pari passu à sociedade, mas não em
seu aspecto adaptativo às ideologias histórico nesta dominante, e sim, no sentido de
refutação de práticas hegemônicas, discriminativas, excludentes. Tanto no Brasil quanto
em outros países multiplicam-se os estudiosos que teorizam o significado do currículo
voltado ao fortalecimento ao invés do fracasso daqueles que passam pela escola. Como
afirma Young apud Sacristán (2000) “o currículo é o mecanismo através do qual o
conhecimento é distribuído socialmente”, portanto, a inserção das tecnologias tais como
a robótica pedagógica contextualizam o cenário de uma educação coerente com as
transformações sociais, econômicas e políticas atuais.
No entanto, o currículo pode assumir diversas abordagens: uma delas pauta-se na
interdisciplinaridade, numa visão globalizadora do conhecimento. Essa abordagem
exclui ou, pelo menos, minimiza a ação prescritiva do currículo. Nela há uma abertura
para a produção de conhecimentos por parte de alunos, orientados por seus professores.
Na interdisciplinaridade, orientados por uma problemática comum, reúne-se estudos
complementares de diversos especialistas em um contexto de estudo de âmbito mais
coletivo.
4. Robótica Pedagógica como Atividade Interdisciplinar
A atividade prática no ambiente de robótica pedagógica se preocupa em criar uma
situação mais propícia possível para que os alunos desenvolvam os seus projetos. Por
exemplo, no caso de uso de kits LEGO, uma das condições que pode ser criada para isso
é a divisão dos alunos em grupos e distribuição de um kit por grupo. Cada grupo de
alunos ficando responsável por um kit possibilita com que as montagens não aconteçam
somente durante os horários estipulados para as aulas, mas sim, de forma flexível, em
dias e horas mais convenientes para cada grupo. O aprendizado deve se dar em situações
que possibilitam resgatar as relações interdisciplinares que normalmente permeiam o
ambiente de robótica pedagógica. Sob esse enfoque, vale ressaltar a importância do rigor
científico, que implica na mudança de atitude do professor, que por sua vez refletirá na
mudança de postura do aluno frente ao conhecimento. É necessário que a cada etapa do
processo de concepção, montagem, automação e controle de um determinado
dispositivo seja permeada de momentos de ação e reflexão e observância rigorosa no
aprendizado de conceitos que possibilitam com que na próxima etapa o aprendizado se
dê em um nível mais elevado.
Outro aspecto que vale a pena levar em consideração em relação à interdisciplinaridade
ao ambiente de robótica pedagógica, no desenvolvimento de um determinado projeto
robótico, é o fato de que esse ambiente, muitas vezes, possibilita ao aluno perceber que
a falta de conhecimento de um determinado conteúdo, do qual a priori ele achava que
tinha, o impossibilita avançar no seu projeto. Por exemplo, a não compreensão advinda
da falta de conhecimento de geometria impossibilita a programação correta do percurso
que o robô deve percorrer. Quando isso acontece, faz-se necessário realizar uma pausa,
estudar os conceitos de outras áreas de conhecimentos para depois solucionar um
problema específico de automação com o qual se está deparando. Isso denota, mais uma
vez, o contexto interdisciplinar que se pode criar nesse ambiente.
Em síntese, no ambiente de robótica pedagógica algumas condições de
interdisciplinaridade devem ser observadas, tais como: Mudança de postura do professor
que, por sua vez, refletir-se-á na mudança de postura do aluno frente ao conhecimento;
Diálogo e cooperação tanto entre os pares colegas e professores quanto entre as
disciplinas e conteúdos curriculares; Metodologia que propicie a realização de um
trabalho interdisciplinar; Dúvida e Indagação que conduzam a uma reflexão e ação
sempre em níveis mais elevados, no formato de uma espiral crescente. Significado que
possibilite a que o conceito a ser aprendido tenha sentido para o aprendiz. Essas
condições fazem do ambiente de robótica pedagógica um espaço onde o currículo pode
ser trabalhado de forma integrada, não fragmentada, fazendo ponte entre as mais
variadas disciplinas. Entretanto, não se deve esquecer que todas essas condições se
tornam possíveis quando houver um comprometimento de toda a comunidade escolar,
isto é, direção, pais professores e alunos, num contexto de criação de uma comunidade
educacional, conforme Garcia (2002).
4.1 Exemplo de projeto interdisciplinar de Robótica Pedagógica
Um dos desafios do trabalho em ambiente de robótica pedagógica articulado ao
currículo consiste em desenvolver projeto em sala de aula que propiciam o aprendizado
contextualizado, de forma mais abrangente possível. A seguir, apresenta-se a síntese de
projeto implementado junto aos alunos de um curso de pós-graduação em tecnologias
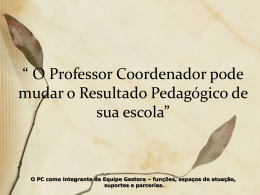
aplicadas à educação. Nesse projeto o desafio baseava-se em fazer um carro se deslocar
sobre uma mesa, chegar à extremidade da mesma, identificando-a e executar uma série
de manobras, evitando-se assim a sua queda. Ao deslocar para frente o carro possuía
sensor de luminosidade que detectava a aproximação da extremidade. Uma vez
detectada esta aproximação o carro parava, invertia-se o sentido de rotação do motor
para que este deslocasse no sentido contrário por um determinado tempo. Neste simples
projeto o processo de concepção, desenvolvimento e construção do carro (Figura 1)
envolveu o estudo de diferentes conceitos presentes em várias disciplinas do currículo
tais como: fundamentos da Física, por meio das engrenagens, polias, velocidade, tempo
e reflexão de luz, como também conceitos de mecânica, nos sistemas de diferencial,
direção e redução, além do aprendizado de conceitos de lógica inerentes ao processo de
programação computacional.
Figura 1. Carro que se desloca sobre uma mesa
Fonte: Arquivo pessoal dos autores
Conclusão
A partir do exposto ao longo deste artigo, conclui-se que a robótica pedagógica, pode
ser uma forma de se garantir a inserção de tecnologia ao currículo escolar, sobretudo no
ensino fundamental e médio. O aspecto interdisciplinar, característico desse ambiente
propicia abertura a novas aprendizagens e maior autonomia intelectual dos alunos. No
que se refere às escolas públicas isso pode se constituir em uma possibilidade de acesso
a conteúdos de cunho tecnológico, geralmente negados à parcela da população menos
favorecida economicamente.
Referências
D’ABREU J.V.V. (2002) Integração de Dispositivos Mecatrônicos para EnsinoAprendizagem de Conceitos na Área de Automação. Tese de Doutorado. Faculdade
de Engenharia Mecânica - FEM/Unicamp, Campinas, SP, Brasil.
D’ABREU, J.V.V et al, (2002) Uma Abordagem Prático-Pedagógica para o Ensino de
Robótica em Ciência e Engenharia de Computação. In: XIII Simpósio Brasileiro de
Informática na Educação – SBIE, UNISINOS, Porto Alegre. Brasil. p. 428-439.
D’ABREU, J. V. V., CHELLA, M. T. (2006) Ambiente Sensorial para Ensino de
Cartografia Tátil aos Alunos Cegos, In: IV Congresso Ibero-Americano Sobre
Tecnologias de Apoio a portadores de Deficiência, Vitória, ES, Brasil. p. 219-222.
GARCIA, M. F. (2002) O Ensino por Meio da Pesquisa: O projeto Ciência na Escola.
Tese de doutorado. Unicamp. Campinas, SP, Brasil.
PAPERT S. (1994). A Máquina das Crianças Repensando a Escola na Era da
Informática, Ed.Artes Médcas Sul Ltda., Porto Alegre, RS, Brasil.
SACRISTÁN, J. G. (2000) O currículo: Uma reflexão sobre a prática. 3ª. Edição. Porto
Alegre, RS, Brasil, p14.
Download