INSTRUMENTAÇÃO
Ç
E CONTROLO
CAPÍTULO X
Controladores Digitais
2012/2013
Bibliografia
Curtis Johnson (1990), Controlo de
Processos
ocessos – Tecnologia
ec o og a da
Instrumentação, Edição da Fundação
Calouste Gulbenkian
Marlin, T., Process Control: Designing
Processes and Control Systems for
Dynamic Performance, Edição da McGraw
Hill, New York, 2000.
Control tutorials for Matlab, Universidade
de Carnegie-Melon, EUA
© Luis Filipe Baptista – MEMM
2
Í di
Índice
do
d capítulo
ít l
Controladores digitais
Implementação das acções de
controlo em computador
Discretização
Discretização do controlador
analógico PID
Controladores P,
P PI e PD digitais
Análise estática do controlador PID
di it l
digital
Exemplos
p
de aplicação
p
ç
marítima
© Luis Filipe Baptista – MEMM
3
C t l d
Controladores
digitais
di it i
Controlo digital
A acção de controlo é implementada
em computador através de
programação
ã das
d equações
õ d
de
controlo
Esta forma de controlo tem muitas
vantagens
© Luis Filipe Baptista – MEMM
4
C t l d
Controladores
digitais
di it i
Esta forma de implementação, permite:
Utilizar algoritmos de controlo mais
complexos sem grandes custos adicionais
Tornar mais versátil a utilização dos
controladores na indústria
Interligar os controladores entre si e
através de uma rede industrial (fieldbus)
ligarem se a um computador de gestão
ligarem-se
central dos processos
5
© Luis Filipe Baptista – MEMM
Controladores digitais
Controlo analógico vs. digital
Controlo analógico
© Luis Filipe Baptista – MEMM
Controlo por computador
6
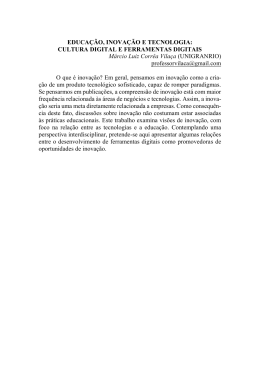
Controladores digitais
u
FC
r
I
P
y
Bomba
centrífuga
q
Caudalímetro Válvula
e(t) = r(t) − y(t)
PID:
© Luis Filipe Baptista – MEMM
⎛
1
de⎞
⎜
u(t) = Kp ⎜e(t) + ∫ e(τ )dτ +Td ⎟⎟
dt ⎠
Ti
⎝
7
Controladores digitais
Controlo digital
Esquema simplificado do anel de controlo
Sinal de controlo
analógico
Sinal de controlo
discreto
Referência
Microprocessador
Sinal de saída do
conversor (discreto)
Conversão
D/A
PROCESSO
Conversão
A/D
Transdutor
Saída
Sinal de saída do
sensor (analógico)
Controlador digital
© Luis Filipe Baptista – MEMM
8
Controladores digitais
Diagrama de controlo digital industrial
4-20 mA
u(kT)
r
Computador
Actuador
Processo
D/A
y(t))
y(
u(t)
y(kT)
A/D
4-20
4
20 mA
Transdutor
Controlador digital
9
© Luis Filipe Baptista – MEMM
Controladores digitais
D/A
μP
Processo
A/D
Os sinais de/para o processo são obtidos através dos conversores A/D e D/A das placas dedicadas. Os sinais são processados um a um através de diversas placas de computador insta
instaladas em armários de controlo
© Luis Filipe Baptista – MEMM
10
Controladores digitais
Algoritmo de controlo digital
O algoritmo de controlo é implementado através de
uma equação às diferenças – difference equation
© Luis Filipe Baptista – MEMM
11
Controladores digitais
Algoritmo de controlo digital
Sinais utilizados no anel de controlo
© Luis Filipe Baptista – MEMM
12
Controladores digitais
Representação
R
t ã matemática
t
áti de
d
sistemas discretos - Equações às
diferenças
Os sistemas contínuos ou analógicos, são
descritos através de equações diferenciais
Os sistemas discretos são descritos
através de equações às diferenças
© Luis Filipe Baptista – MEMM
13
Controladores digitais
Representação matemática de
sistemas discretos - Equações às
dife enças
diferenças
Num controlador digital, a equação às
diferenças, descreve a relação matemática entre o sinal de entrada - erro e(k) e o
sinal de saída – acção de controlo u(k)
q ç
às diferenças
ç são fundamenAs equações
tais, pois podem ser facilmente implementadas em computador
p
((NOTA: CARACTERÍSTICA MUITO IMPORTANTE!)
© Luis Filipe Baptista – MEMM
14
Controladores digitais
Equações às diferenças
Vamos supor que estávamos
i
interessados
d em conhecer
h
o sinal
i l u(k),
(k) ou
seja o valor de u para o instante k
Para obter este sinal de saída temos que
calcular uma função que tenha em
consideração os sinais anteriores de e(0)
até e(k) e os sinais de saída desde u(0)
até u(k-1), ou seja:
u(k) = f (e(0),...,
e(0) e(k); u(0),...,
u(0) u(k - 1) )
© Luis Filipe Baptista – MEMM
15
Controladores digitais
Equações às diferenças
Vamos assumir que a função f é linear e
que depende apenas de um número finito
de sinais de e(k) e de u(k).
A estrutura
t t
básica
bá i da
d equação
ã que
representa a relação matemática entre
u(k)
(k) e e(k),
e(k) designa-se
designa se por
po equação
eq ação às
diferenças, e pode ser escrita através de
u(k) = −a(k - 1)u(k − 1) − ... − a(0)u(0) + b(k)e(k − 1) + ...b(0)e(0
b(0)e(0)
ou de uma forma mais simplificada :
u k = −a k -1u k -1 − ... − a 0 u 0 + b k e k −1 + ...b 0 e 0
© Luis Filipe Baptista – MEMM
16
Controladores digitais
Algoritmo de controlo digital
Exemplo de uma equação de controlo
di it l às
digital
à diferenças:
dif
u(k)
( ) = 0.75u(k
( − 1)) + e(k)
( ) - 0.95e(k
( - 1))
u(k) só é válido para k ≥ 0
Admitindo que o erro varia de acordo
com um degrau unitário discreto, ou seja:
© Luis Filipe Baptista – MEMM
⎧0 k < 0
e(k) = ⎨
⎩1 k ≥ 0
17
Controladores digitais
Algoritmo
de
Al
it
d controlo
t l digital
di it l
Solução para quatro períodos de
amostragem (4*Ts), ou seja k varia de 0
a4
NOTA : u(k < 0) = 0
k = 0 ⇒ u(0)
( ) = 0.75u((−1)) + e(0)
( ) - 0.95e(-1)
( ) = 0 +1+ 0 = 1
k = 1 ⇒ u(1) = 0.75u(0) + e(1) - 0.95e(0) = 0.75 + 1 - 0.95 = 0.8
k = 2 ⇒ u(2) = 0.75u(1)
0 75u(1) + e(2) - 0.95e(1)
0 95e(1) = 0.75
0 75 × 0.8
0 8 + 1 - 0.95
0 95 = 0.65
0 65
k = 3 ⇒ u(3) = 0.75u(2) + e(3) - 0.95e(2) = 0.75 × 0.65 + 0.05 = 0.5375
k = 4 ⇒ u(4) = 0.75u(3)
0 75u(3) + e(3) - 0.95e(3)
0 95e(3) = 0.75
0 75 × 0.5375
0 5375 + 0.05 = 0.453
0 453
© Luis Filipe Baptista – MEMM
18
Controladores digitais
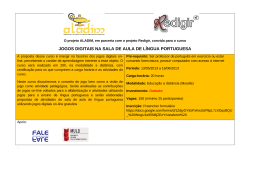
Algoritmo de controlo digital
2
erro e(k)
1.5
05
0.5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
0
05
0.5
1
15
1.5
2
k
25
2.5
3
35
3.5
4
1
controlo u(k)
Gráficos
de e(k) e
u(k) para
k=0,1,…,4
1
0.8
0.6
0.4
© Luis Filipe Baptista – MEMM
19
Controladores digitais
Modelação do sistema discreto
Representação do conjunto constituído pelo
Conversor D/A + Processo H2(s) + Conversor
A/D -> função de transferência discreta Hzoh(z)
© Luis Filipe Baptista – MEMM
20
Controladores digitais
Modelação do sistema discreto
Diagrama de controlo digital - Apenas são
utilizadas variáveis discretas
G(z) – Função de transferência do controlador
digital ou discreto
Hzoh(z) – função de transferência do sistema
discretizado (D/A + Processo H2(s) + A/D)
© Luis Filipe Baptista – MEMM
21
Controladores digitais
Modelação do sistema discreto
A construção da função de transferência discreta Hzoh(z),
Hzoh(z) é muito importante,
importante pois permite
analisar o comportamento do processo (sistema
), q
quando este é inserido num anel de
contínuo),
controlo digital
Modelo do conversor D/A (interruptor+retentor
de ordem zero - ZOH)
© Luis Filipe Baptista – MEMM
22
Controladores digitais
Modelação do sistema discreto
Combinando o diagrama anterior com o modelo
da função de transferência do processo - G0(s),
(s)
obtém-se a relação entre o sinal de entrada –
acção de controlo digital u(kT) e a saída
amostrada do processo =>y(k)=Hzoh(k)*u(k)
Conv. D/A+ZOH
processo
© Luis Filipe Baptista – MEMM
23
C t l d
Controladores
digitais
di it i
Modelação do sistema discreto
Exemplo: considere o sistema massamola-amortecedor, em que m=10 Kg;
b=50 Ns/m e k=200 N/m. A sua função
de transferência
f ê
contínua
í
é dada por:
d2y
dy
1
m 2 + b + ky = F(t) ⇒ G(s) =
dt
dt
ms 2 + bs + k
Y(s)
0.1
= 2
G(s) =
F(s) s + 5s + 20
© Luis Filipe Baptista – MEMM
24
C t l d
Controladores
digitais
di it i
Modelação do sistema discreto
-3
6
5
4
yy(t) [m]
Gráfico de
resposta de
G(s) para
uma
entrada
degrau de
F=1 N.
x 10
3
2
1
0
0
05
0.5
1
15
1.5
2
25
2.5
t [seg.]
© Luis Filipe Baptista – MEMM
25
C t l d
Controladores
digitais
di it i
Modelação do sistema discreto
Se discretizarmos o modelo contínuo G(s)
através do comando c2dm do Matlab com um
período de amostragem Ts=0.1 seg., e manutenção dos valores das entradas constantes
durante a operação de amostragem (método
ZOH), obtém-se a seguinte função de transferência discreta Hzoh(z):
Y(z) (0.4193z
(0 4193z + 0.3547)
0 3547) *10-3
H zoh (z) =
=
U(z)
z 2 - 1.4517z + 0.6065
© Luis Filipe Baptista – MEMM
26
C t l d
Controladores
digitais
di it i
Modelação do sistema discreto
Se aplicarmos o operador atraso que
con e te a função
converte
f nção de transferência
t ansfe ência discredisc e
ta numa equação às diferenças, temos:
Operador atraso :
z -n × Y(z) = y(k − n) ⇒ z -1 × Y(z) = y(k − 1)
Dividindo
i idi d a função
f
d transferê
de
f ncia
i discreta
di
por z 2 , fica
fi :
Y(z) (0.4193z -1 + 0.3547z -2 ) *10-3
=
H zoh ((z)) =
U(z)
1 - 1.4517z -1 + 0.6065z -2
Aplicando o operador atraso, obtêm - se :
y(k) = 1.4517y(k - 1) − 0.6065y(k) + (0.4193u(k - 1) + 0.3547u(k - 2)) *10-3
27
© Luis Filipe Baptista – MEMM
Controladores digitais
Modelação do sistema discreto
-3
6
5
4
y(tt) ; y(k)
Gráfico de
resposta de
G(s) – azul e
de G(z) –
vermelho,
para uma
entrada
degrau de
F=1 N.
x 10
3
2
1
0
0
05
0.5
1
15
1.5
2
25
2.5
t [seg.]
© Luis Filipe Baptista – MEMM
28
Controladores digitais
% parâmetros do sistema
m=10;
b=50;
k=200;
% modelo mass
mass-mola-amortecedor
mola amortecedor
Código em
num=[1];
den=[10 50 200];
Matlab do
ç da resp.
p da massa y a um entrada
%simulação
exemplo
degrau
t=0:0.1:2.5; %vector de tempos
anterior
% resposta ao degrau unitário
(aplica o
[y]=step(num,den,t);
plot(t,y),grid,xlabel('t [seg.]'),ylabel('y(t) [m]')
método zoh
hold on
nas
% conversão do modelo continuo para digital
Ts=0.1; % período de amostragem
entradas)
[numd,dend] = c2dm(num,den,Ts,'zoh')
% resposta
t ao degrau
d
unitário
itá i digital
di it l
[yd]=dstep(numd,dend,length(t));
29
© Luis Filipe Baptista – MEMMstairs(t,yd,'r'),ylabel('y(t) ; y(k)')
Controladores digitais
Diagramas de blocos de equações às
diferenças
Fornece uma representação
F
t ã gráfica
áfi de
d um moded
lo matemático
Blocos mais
usuais
utilizados no
SIMULINK
© Luis Filipe Baptista – MEMM
30
Controladores digitais
Diagramas de blocos de equações às
diferenças
Exemplo:
E
l di
diagrama d
de bl
blocos d
da equação
ã à
às dif.
dif
y(k)=a*y(k-1)+(1-a)*u(k)
© Luis Filipe Baptista – MEMM
31
Controladores digitais
Nos controladores digitais são implementadas as equações
q ç
análogas
g às utilizadas em
controlo contínuo ou analógico, ou seja:
Duas posições (Tudo
(Tudo-ou-Nada
ou Nada ou ON
ONOFF)
Acção proporcional (P)
Acção integral (I)
Acção
ã P+I
Acção P+D
Acção P+I+D
32
© Luis Filipe Baptista – MEMM
Controladores digitais
Em controlo analógico,
o custo do controlaó
dor depende do número de acções de
controlo que lhe estão associadas (quanto
mais hardware se utilizar maior é o custo)
Em controlo digital, esta situação não tem
peso, p
p
pois os algoritmos
g
são p
programados
g
em microprocessador
Deste modo, os controladores digitais
implementam (em geral), a versão discreta
do algoritmo analógico PID
© Luis Filipe Baptista – MEMM
33
Controladores digitais
Discretização do controlador PID analógico
no domínio do tempo
Al
Algoritmo
it
PID contínuo
tí
(u
( 0=acção
ã p/t=0)
/t 0)
⎛
1 t
de(t) ⎞
⎟⎟
u(t) = u 0 + K p ⎜⎜ e(t) + ∫ e(t)dt + Td
Ti 0
dt ⎠
⎝
t
⎛ de(t) ⎞
u(t) = u 0 + K p e(t) + K i ∫ e(t)dt + K d ⎜
⎟
0
⎝ dt ⎠
Vamos considerar as aproximações numéricas do integral e da derivada
© Luis Filipe Baptista – MEMM
34
Controladores digitais
Discretização do controlador PID analógico:
aproximação do integral do erro
Os mais usuais são os métodos de integração
rectangular:
Método
Mét
d de
d Euler
E l em avanço (Euler'
(E l ' s forward
f
d method)
th d) :
u(k) ≈ u(k − 1) + Ts × e(k - 1)
Método
é d de
d Euler
l em atraso (Euler'
( l ' s backward
b k d method)
h d) :
u(k) ≈ u(k − 1) + Ts × e(k)
Método de Tustin (Integração trapezoidal) :
⎛ e(k) + e(k − 1) ⎞
u(k) ≈ u(k − 1) + Ts ⎜
⎟
2
⎝
⎠
© Luis Filipe Baptista – MEMM
35
Controladores digitais
Discretização do controlador PID analógico:
aproximação do integral do erro
Representação
gráfica
(h =Ts
T =
período de
amostragem)
t
)
© Luis Filipe Baptista – MEMM
36
Controladores digitais
Discretização do controlador PID analógico:
aproximação da derivada
e(k)
(k)
de(k) e(k) − e(k - 1)
≈
dt
T
e(k-1)
( )
© Luis Filipe Baptista – MEMM
37
Controladores digitais
Discretização
Di
ti
ã do
d controlador
t l d PID
analógico no domínio do tempo
Equação do controlador PID discreto
k -1
⎛
⎛ e(k) − e(k − 1) ⎞ ⎞
T
s
⎟⎟ ⎟
u(k) = u 0 + K p ⎜⎜ e(k) + ∑ e(i) + Td ⎜⎜
⎟
i =0
T
T
i
s
⎝
⎠
⎝
⎠
Esta forma particular do algoritmo digital PID, é
conhecida
h id por algoritmo
l
it
de
d posição
i ã (position
iti
algorithm), devido ao facto de o sinal de
controlo u(k) ser calculado relativamente a um
valor base, que é uo
© Luis Filipe Baptista – MEMM
38
Controladores digitais
Discretização
Di
ti
ã do
d controlador
t l d PID
analógico no domínio do tempo
O algoritmo anterior designa-se também
por algoritmo
p
g
do tipo
p não recursivo
Esta designação deve-se ao facto de o
algoritmo necessitar de ir guardando em
cada iteração o somatório de todos os
erros anteriores
© Luis Filipe Baptista – MEMM
39
Controladores digitais
Discretização
Di
ti
ã do
d controlador
t l d PID
analógico no domínio do tempo
É possível obter uma outra forma de
cálculo mais p
prática,, que
q
se baseia no
valor da acção de controlo no instante
anterior,, ou seja
j u(k-1).
(
)
Esta outra forma de implementação do
algoritmo PID discreto, designa
designa-se
se por
algoritmo incremental ou de velocidade
(velocity algorithm)
© Luis Filipe Baptista – MEMM
40
Controladores digitais
Discretização
Di
ti
ã do
d controlador
t l d PID
analógico no domínio do tempo
Considerando a partir do algoritmo de
posição,
p
ç , a expressão
p
de u(k-1),
(
), tem-se:
u(k - 1) = K p e(k - 1) +
K p Ts
Ti
k -2
∑ e(i)
i =0
⎛ e(k
(k - 1) − e(k
(k − 2) ⎞
⎟⎟ + u 0 (k − 1)
+ K p Td ⎜⎜
Ts
⎝
⎠
41
© Luis Filipe Baptista – MEMM
Controladores digitais
Discretização
Di
ti
ã do
d controlador
t l d PID
analógico no domínio do tempo
Calculando Δu=u(k)-u(k-1), tem-se:
u(k)
( ) − u(k
( − 1)) = K p (e(k)
( ) - e(k
( - 1)) ) +
K p Td
Ts
© Luis Filipe Baptista – MEMM
K p Ts
Ti
e(k
( - 1)) +
(e(k) − 2e(k − 1) + e(k − 2) )
42
Controladores digitais
Discretização do controlador PID
analógico
g
no domínio do tempo
p
Neste caso, só é calculada diferença Δu
entre as acções de controlo u(k) e u(k
u(k-1),
1),
ou seja:
Δu = u(k)
( ) − u(k
( − 1))
© Luis Filipe Baptista – MEMM
43
Controladores digitais
Discretização do controlador PID
g
no domínio do tempo
p
analógico
Por este motivo, este algoritmo é
designado por algoritmo incremental
É igualmente designado por algoritmo de
velocidade (velocity algorithm)
Também é conhecido em diversa
lit
literatura
t
por algoritmo
l
it
recursivo
i
© Luis Filipe Baptista – MEMM
44
Controladores digitais
Discretização do controlador PID
analógico no domínio do tempo
Este algoritmo, pode assumir a seguinte forma
(integração rectangular em avanço – forward
Euler) u(k) = u(k − 1) + q 0 e(k) + q1e(k − 1) + q 2 e(k − 2)
⎛ T ⎞
q 0 = K p ⎜⎜1 + d ⎟⎟
⎝ Ts ⎠
⎛ T 2T ⎞
q1 = −K p ⎜⎜1 − s + d ⎟⎟
⎝ Ti Ts ⎠
q2 = Kp
Td
Ts
45
© Luis Filipe Baptista – MEMM
Controladores digitais
Discretização do controlador PID
analógico no domínio do tempo
Diagrama em Simulink do controlo PID digital de
nível de um tanque
control
To Workspace1
nivelr
erro
To Workspace3
To Workspace2
Scope
-Kq0
Step
z-0.9512
Hzoh(z)
1
nivel
To Workspace
-K-
z
1
q1
e(k-1)
1
z
( )
e(k-2)
© Luis Filipe Baptista – MEMM
0.03902
-K-
z
u(k-1)
q2
q
46
Controladores digitais
Discretização do controlador PID
analógico no domínio do tempo
Acção de controlo digital integral – forward Euler
u(k) − u(k − 1) =
K p Ts
Ti
e(k - 1)
Acção de controlo proporcional (P) – relação
estática
u(k)
( ) = K p e(k)
( )
© Luis Filipe Baptista – MEMM
47
Controladores digitais
Discretização do controlador PID
analógico no domínio do tempo
Acção de controlo digital PD - forward Euler
⎛
⎞
Td
u(k) = K p ⎜⎜ e(k) + (e(k) - e(k - 1) )⎟⎟
Ts
⎝
⎠
K p Td
⎛ Td ⎞
u(k) = K p ⎜⎜1 + ⎟⎟e(k) e(k − 1)
Ts
⎝ Ts ⎠
u(k)
(k) = q 0 e(k)
(k) − q 2 e(k
(k − 1)
© Luis Filipe Baptista – MEMM
48
Controladores digitais
Discretização do controlador PID analógico
no domínio do tempo
Algoritmo PID discreto (integração rectangular
trapezoidal)
u(k) = u(k − 1) + q 0 e(k) + q1e(k − 1) + q 2 e(k − 2)
⎛
T
T ⎞
q 0 = K p ⎜⎜1 + s + d ⎟⎟
⎝ 2Ti Ts ⎠
⎛
T
2T ⎞
q1 = − K p ⎜⎜1 − s + d ⎟⎟
⎝ 2Ti Ts ⎠
q2 = Kp
Td
Ts
© Luis Filipe Baptista – MEMM
49
Controladores digitais
Problemas típicos do algoritmo digital
Saturação do actuador quando a acção
integral atinge um valor muito elevado
(
(windup)
dup)
Uma possibilidade consiste em utilizar o
algoritmo incremental que reduz os efeitos
do windup
© Luis Filipe Baptista – MEMM
50
Controladores digitais
Problemas típicos do algoritmo digital
Uma das formas possíveis de implementar
um sistema de anti-windup
Consiste em introduzir um mecanismo que
faça parar a actualização do integral
quando o actuador estiver saturado
Ver esquema no slide seguinte
© Luis Filipe Baptista – MEMM
51
Controladores digitais
Problemas típicos do algoritmo digital
Diagrama de controlo PID com anti-windup
© Luis Filipe Baptista – MEMM
52
Controladores digitais
Problemas típicos do algoritmo digital
Influência do windup no desempenho do controlo
53
© Luis Filipe Baptista – MEMM
Controladores digitais
Implementação prática da acção derivativa
A acção derivativa não deve ser implementada directamente, pois iria amplificar o
ruído presente nos sinais.
Utiliza-se a derivada da saída e não o erro
e=r-y.
No controlador analógico, utiliza-se a
seguinte aproximação da derivada (Nota: N
de 3 a 20):
© Luis Filipe Baptista – MEMM
sTd
sTd ≈
1 + sTd /N
54
Controladores digitais
Implementação prática da acção derivativa
A discretização desta equação, conduz a:
Acção
ã derivativa
d i
i contínua
í
modificada
difi d (D)
( )
Td dD
dyy
+ D = − K p Td
N dt
dt
Acção derivativa discreta D(k)
K pTd N
Td
(y(k) - y(k - 1))
D(k) =
D(k - 1) −
Td + kN
Td + kN
55
© Luis Filipe Baptista – MEMM
Controladores digitais
Implementação prática da acção derivativa
Outra possibilidade: utilizar mais pontos no cálculo
da acção derivativa.
derivativa Caso sejam usados 4 pontos
de erro, utilizando integração rectangular em
ç , obtém-se:
avanço,
⎡
⎤
T
T
u(k) = u(k − 1) + K p ⎢e(k) - e(k − 1) + s e(k) + d (e(k) + 2e(k − 1) − 6e(k − 2) + 2e(k - 3) + e(k - 4) )⎥
Ti
6Ts
⎣
⎦
u(k)
(k) = u(k
(k − 1) + q 0 e(k) + q 1e(k − 1) + q 2 e(k − 2) + q 3 e(k − 3) + q 4 e(k − 4)
⎧
⎛ Ts Td ⎞
⎟⎟ ;
⎪q 0 = K p ⎜⎜1 + +
T
6T
i
s ⎠
⎝
⎪
Td
⎪
;
⎨q 2 = −K p
T
s
⎪
Td
⎪
⎪ q 4 = K p 6T
s
⎩
© Luis Filipe Baptista – MEMM
⎛
T
q 1 = K p ⎜⎜ - 1 + d
3Ts
⎝
Td
q3 = K p
3Ts
⎞
⎟⎟
⎠
56
Controladores digitais
Implementação em Matlab/Simulink
Controlador PID incremental com aproximação da
derivada através de 4 pontos de erro
Erro
1
Setpoint
2
processo
Kp*(1+(Ts/Ti)+Td/(6*Ts))
1
q0
z
e(k-1)
Kp*(-1+Td/(3*Ts))
Product
Product4
q1
Saturation
1
z
e(k-2)
-Kp*(Td/Ts)
Product1
q2
1
1
controlo_cr
2
controlo_sr
controlo
sr
z
u(k-1)
1
z
e(k-3)
Product2
Kp*(Td/(3*Ts))
q3
1
z
e(k-4)
Product3
Kp*(Td/(6*Ts))
Constant4
© Luis Filipe Baptista – MEMM
57
Controladores digitais
Análise estática do controlador PID digital
Considerando que se aplica à entrada do controlador uma entrada degrau unitário discreto
⎧1 k ≥ 0
e(k) = ⎨
⎩0 k < 0
Tendo em consideração o algoritmo de velocidade
u(k) = u(k − 1) + q 0 e(k) + q1e(k − 1) + q 2 e(k − 2)
© Luis Filipe Baptista – MEMM
58
Controladores digitais
Análise
A áli estática
táti do
d controlador
t l d PID digital
di it l
Resposta do controlador u(k) para erro e(k)=1
u(0) = q 0
u(1)
(1) = u(0)
(0) + q 0 + q1 = 2q
2 0 + q1
u(2) = u(1) + q 0 + q1 + q 2 = 3q 0 + 2q1 + q 2
.......
u(k) = u(k − 1) + q 0 + q1 + q 2
u(k)
(k) = (k + 1)q
1) 0 + kq
k 1 + (k − 1)q
1) 2
59
© Luis Filipe Baptista – MEMM
Controladores digitais
Análise estática do controlador PID digital
Gráfico da resposta do controlador PID
u(k)
q0
q0-q
q2
q0+q
q1+q
q2
2q0+q1
k
© Luis Filipe Baptista – MEMM
60
Controladores digitais
Análise
A áli estática
táti do
d controlador
t l d PID digital
di it l
Gráfico da resposta do controlador PI
u(k)
q0+q
q1
q0
k
© Luis Filipe Baptista – MEMM
61
Controladores digitais
Análise estática do controlador PID digital
Da análise do gráfico do controlador PID, tem-se:
u(0) > u(1) e u(k) > u(k-1),
u(k 1) o que corresponde
ao comportamento típico do controlador PID
analógico utilizado na indústria
Considerando que q0 > 0, tem-se:
u(1)
(1) < u(0)
(0) ⇒ q 0 + q1 > 0 ⇒ q 0 < −q1
u(k) > u(k − 1) para k ≥ 2 :
q 0 + q1 + q 2 > 0 ou q 2 > −(q 0k + q1 )
© Luis Filipe Baptista – MEMM
62
Controladores digitais
Análise estática do controlador PID digital
As condições anteriores são válidas para um
controlador PID com ganho positivo
positivo, ii.e.
e q 0 > q2
Em resumo, têm-se as seguintes condições que
permitem obter um comportamento análogo entre
o controlador PID analógico e digital
q0 > 0
q1 < − q 0
− (q 0 + q1 ) < q 2 < q 0
63
© Luis Filipe Baptista – MEMM
Controladores digitais
Análise estática do controlador PID digital
Representação gráfica das condições anteriores
q1
q1
1 q0
4 q0i
q0
q2
-q0i
2
3
-2q0i
q1=- (q0i+q2)
q1=- q0
© Luis Filipe Baptista – MEMM
64
Controladores digitais
Exemplo de aplicação:
Resposta do controlador PID incremental anterior
aplicado ao sistema massa-mola-amortecedor
(visto anteriormente)
Parâmetros:
0.12
Kp=175
g
Td=0.1 seg.
Ts=0.1 seg.
pos
sição da massa [m]
Ti=0.25 seg.
0.1
0 08
0.08
0.06
0.04
0.02
0
0
0.5
1
1.5
2
2.5
tempo [seg.]
3
3.5
© Luis Filipe Baptista – MEMM
4
65
Controladores digitais
Aspectos
dos
digitais
A
t técnicos
té i
d controladores
t l d
di it i
Os algoritmos PID digitais funcionam bem
quando
d o período
í d d
de amostragem
t
é baixo
b i
Portanto uma regra a seguir será a de utilizar
um período
í d d
de amostragem Ts o mais
i b
baixo
i
possível, ou seja utilizar uma frequência de
amostragem Fs o mais elevada possível
No entanto, utilizar uma frequência de
amostragem
t
muito
it elevada,
l
d quando
d ttall não
ã é
necessário, pode implicar um desperdício de
recursos
© Luis Filipe Baptista – MEMM
66
Controladores digitais
Aspectos
dos
digitais
A
t técnicos
té i
d controladores
t l d
di it i
No caso de se usarem períodos de amostragem
muito baixos,
baixos isto significa que se vão capturar
sinais de elevada frequência (Ex: ruído), o que
não é benéfico para a obtenção de um bom
desempenho do controlador
No caso de se usarem p
períodos de amostragem
g
muito elevados, então pode correr-se o risco de
perder-se muita informação do sinal a amostrar.
No caso limite, ocorre o fenómeno de ALIASING
anteriormente apresentado
© Luis Filipe Baptista – MEMM
67
Controladores digitais
Aspectos técnicos dos controladores digitais
Inconvenientes adicionais de utilização de
frequências de amostragem muito elevadas:
O custo da implementação aumenta devido ao
facto de ser necessário utilizar componentes
electrónicos mais sofisticados
q
ç
de dados ((DAS)) de
Um sistema de aquisição
uma instalação industrial, necessita de ler, em
geral, muitos pontos de entrada.
A sua funcionalidade degrada-se significativamente se cada anel de controlo funcionar a
uma frequência
f
ê i de
d amostragem
t
muito
it elevada
l
d
© Luis Filipe Baptista – MEMM
68
Controladores digitais
Aspectos técnicos dos controladores digitais
Metodologia a seguir:
Efectuar uma análise à largura de banda do
sistema a controlar de modo a obter a frequência máxima expectável do sistema
Aplicar o Teorema da Amostragem (Shannon)
Multiplicar a frequência de amostragem por
um factor de 10, para controlo digital
Analisar os sinais amostrados de modo a
verificar os níveis de ruído, sinais espúrios, etc,
que necessitem de correcção adicional através
de filtragem adicional, por exemplo.
69
© Luis Filipe Baptista – MEMM
Controladores digitais
Desempenho de um controlador PID digital
em função de diferentes valores de Ts =Δt
Desempenho adequado para Ts= 5 seg.
seg
Ts=5 seg.
© Luis Filipe Baptista – MEMM
70
Controladores digitais
Desempenho de um controlador PID digital
em função de valores diferentes Ts =Δt
Grande degradação do controlo para Ts=10 e 15 s.
s
Ts=10 seg.
Ts=15 seg.
71
© Luis Filipe Baptista – MEMM
Controladores digitais
Controladores
digitais
C t l d
di
it i
Hardware - Esquema típico
ROM
bus
endereço
Mi
Microprocessador
d
RAM
bus de dados
linhas de controlo
Dados de
I/O
n
© Luis Filipe Baptista – MEMM
n
72
Controladores digitais
Controladores digitais - Descrição do
hardware
Microprocessador – efectua todos os
cálculos e manipulações de dados reais
conforme
f
prescrito
i pelo
l programa de
d
controlo
ROM – memória permanente, geralmente
só de leitura, onde ficam alojados os
programas do controlador
© Luis Filipe Baptista – MEMM
73
Controladores digitais
Controladores digitais
RAM – memória volátil. É usada para
armazenar temporariamente
t
i
t dados
d d e
cálculos de funções. Quando se desliga o
controlador
t l d ou falha
f lh a alimentação,
li
t ã estes
t
dados são apagados da memória
I/O – módulos
ó
de leitura/escrita de
sinais
© Luis Filipe Baptista – MEMM
74
Controladores digitais
Controladores digitais (software)
Os algoritmos são programados
recorrendo a linguagens de programação
ã
(C, Fortran, Basic, etc..)
As operações a realizar no
microprocessador obedecem a um
fluxograma que inclui as seguintes
operações básicas
© Luis Filipe Baptista – MEMM
75
Controladores digitais
Controladores
digitais
C t l d
di
it i (software)
( ft
)
Operações básicas:
1. Leitura dos valores no porto das
entradas
2. Realização dos cálculos (alteração de
escalas, cálculos matemáticos, etc..)
3. Decisão das acções a realizar em função
das condições de funcionamento
4. Escrita dos valores de controlo no porto
de saída
© Luis Filipe Baptista – MEMM
76
Controladores digitais
Software - Fluxograma de cálculo
Ler no porto A/D a saída do processo – y(k)
Calcular o erro e(k)=ref(k)-y(k)
Calcular os valores das acções P, I e D
Escrever no porto D/A o valor de u(k)
© Luis Filipe Baptista – MEMM
77
Controladores digitais
Exemplo de controlador digital (FUJI)
© Luis Filipe Baptista – MEMM
78
Controladores digitais
Exemplos
p
de sistemas de
controlo digital aplicados a
sistemas
i t
marítimos
íti
© Luis Filipe Baptista – MEMM
79
C t l d
Controladores
digitais
di it i
Regulação de velocidade de motores
(engine speed control)
Nos motores de explosão, a velocidade de
rotação é controlada através da abertura
de uma borboleta colocada no colector de
admissão de ar
Esta borboleta regula o caudal de ar que
entra nos cilindros e p
por conseguinte
g
a
relação ar/combustível
© Luis Filipe Baptista – MEMM
80
C t l d
Controladores
digitais
di it i
Regulação de velocidade de motores
(engine speed control)
Nos motores diesel esse dispositivo não
existe
Assim, é necessário utilizar um sistema
de regulação
g
ç
de velocidade,, dado que,
q ,
para uma variação de carga, o motor
poderia aumentar continuamente a
p
velocidade de rotação até se destrui
© Luis Filipe Baptista – MEMM
81
C t l d
Controladores
digitais
di it i
Regulação de velocidade (speed
control)
De forma a manter constante a
velocidade quando se varia a carga, os
motores diesel são equipados com
sistemas automáticos de regulação de
velocidade
g
p
podem ser de diversos
Estes reguladores
tipos (mecânicos, hidráulicos, e
electrónicos)) e de maior ou menor
complexidade
© Luis Filipe Baptista – MEMM
82
C t l d
Controladores
digitais
di it i
Regulador mecânico de motor Diesel
Regulador
mecânico de
velocidade de
motor diesel
(Woodward
Controls)
© Luis Filipe Baptista – MEMM
83
C t l d
Controladores
digitais
di it i
Regulação digital de velocidade
© Luis Filipe Baptista – MEMM
84
C t l d
Controladores
digitais
di it i
Regulação digital de velocidade/carga
de um motor diesel marítimo
© Luis Filipe Baptista – MEMM
85
C t l d
Controladores
digitais
di it i
Controlo digital de óleo de lubrificação
das camisas
© Luis Filipe Baptista – MEMM
86
C t l d
Controladores
digitais
di it i
Controlo digital de óleo de lubrificação
das camisas
© Luis Filipe Baptista – MEMM
87
Controladores digitais
Motores diesel dual-fuel
dual fuel (4 tempos)
© Luis Filipe Baptista – MEMM
88
Controladores digitais
Sistema de controlo do motor
© Luis Filipe Baptista – MEMM
89
Controladores digitais
Diagrama de operação (dual(dual-fuel)
© Luis Filipe Baptista – MEMM
90
Controladores digitais
Controlo do caudal de ar para o motor
© Luis Filipe Baptista – MEMM
91
Controladores digitais
Controlo do caudal de gás para o motor
© Luis Filipe Baptista – MEMM
92
Controladores digitais
Sistema de alimentação de fuel
© Luis Filipe Baptista – MEMM
93
Controladores digitais
Caldeira aquitubular (grande débito)
© Luis Filipe Baptista – MEMM
94
Controladores digitais
Controlo de nível de água (clássico)
© Luis Filipe Baptista – MEMM
95
Controladores digitais
Controlo digital de nível de água
© Luis Filipe Baptista – MEMM
96
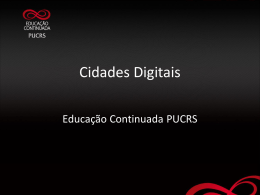
Controladores digitais
Controlo do hélice de passo variável
© Luis Filipe Baptista – MEMM
97
Controladores digitais
Controlo de pressão do gás inerte (IGS)
(sistema de controlo de acção dupla)
© Luis Filipe Baptista – MEMM
98
Download