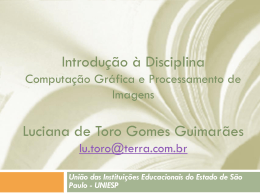
AVALIAÇÃO DE TÉCNICAS DE REGISTRO E RECONSTRUÇÃO DE IMAGENS NO PROBLEMA DE SUPER-RESOLUÇÃO Arthur Faria Porto∗, André Paim Lemos† ∗ † Instituto Federal do Norte de Minas Gerais - Departamento de Informática Fazenda Varginha, 39560-000 Salinas, MG, Brasil Universidade Federal de Minas Gerais - Departamento de Engenharia Eletrônica Av. Antônio Carlos, 6627, 31270-901 Belo Horizonte, MG, Brazil Emails: [email protected], [email protected] Abstract— In this paper a evaluation of distinct image registration and reconstruction methods are applied to the Super-Resolution problem. Four image registration and five image reconstruction methods were investigated. The objective of this study is to find, among the evaluated methods, the best combination of techniques able to generate a high resolution image based on a set of low resolution images. The candidate methods were selected from several distinct controlled test cases proposed to evaluate the methods in difference scenarios. The best image registration and reconstruction methods were selected and applied in a real super resolution problem. The experiment results were able to show the efficacy of the chosen combination. Keywords— Super-Resolution, Image Registration, Image Reconstruction. Resumo— Neste trabalho uma avaliação de distintos métodos de registro e reconstrução de imagens são aplicadas ao problema de Super-Resolução. Quatro métodos de registro e cinco métodos de reconstrução de imagem foram investigados. O objetivo deste estudo é encontrar, dentre os métodos avaliados, a melhor combinação de técnicas capazes de gerar uma imagem de alta resolução com base em um conjunto de imagens de baixa resolução. Os métodos candidatos foram selecionados a partir de distintos casos de teste controlados, propostos para avaliar os métodos em cenários de diferença. Os melhores métodos de registo e reconstrução de imagens foram selecionados e aplicados a um problema real de Super-Resolução. Os resultados dos experimentos foram capazes de demonstrar a eficácia da combinação escolhida. Palavras-chave— 1 Super-Resolução, Registro de imagens, Reconstrução de imagens. Introdução A partir das imagens digitais inúmeras informações podem ser extraı́das. Aplicações que se utilizam dessas informações almejam, ou dependem, de imagens de alta resolução (AR). Maiores resoluções propiciam um maior detalhamento do contexto observado auxiliando à tomada de decisão, tanto para interpretação humana, quanto para sistemas de máquina automáticos. Apesar das contı́nuas pesquisas para desenvolvimento de sensores com maiores resoluções, a sua utilização é restrita devido a um elevado custo, inviabilizando algumas aplicações. No entanto, existem métodos que permitem o aumento da resolução de imagens geradas por sensores de baixa resolução (BR), como por exemplo, as técnicas de Super-Resolução (SR) (Milanfar, 2010).. A nı́vel de hardware, o ganho em resolução espacial pode ser obtido de duas maneiras, diminuindo o tamanho do pı́xel e aumentando a área do sensor. O tamanho do pixel depende do conjunto óptico. Geralmente, as lentes utilizadas apresentam aberrações geométricas que causam difrações óticas, restringindo a resolução do sensor (Cossairt, 2011). Além disso, ao diminuir as dimensões do pı́xel a sensibilidade à luz também diminui, causando perdas na relação sinal/ruı́do do sensor (Chen et al., 2000). Por um outro lado, aumentar as dimensões do sensor (maiores quantidades de pı́xeis) acarreta em um maior consumo de energia, que amplifica a capacitância do sistema. Com as restrições existentes a nı́vel hardware, métodos de SR podem aplicados. Os métodos de SR utilizam de imagens provenientes de sensores de BR, esses sensores geralmente não tem especificações complexas e são de baixo custo. Geralmente, o processo SR pode ser dividido em 2 etapas, registro de deslocamento entre as imagens e reconstrução. Portanto, o principal objetivo do presente trabalho é analisar diferentes técnicas de registro e reconstrução de imagens de BR avaliando o seu desempenho, com o fim de obter uma combinação de métodos que beneficie a aplicação em contextos que possam usufruir de imagens com resolução aumentada. Esse trabalho está dividido da seguinte forma. Na sessão seguinte o modelo do processo de SR é descrito, bem como, os métodos de registro e reconstrução de imagens estudados no trabalho. Os experimentos realizados e os resultados obtidos são apresentados na sessão 3. E por fim, as conclusões do trabalho são expostas. 2 Super-Resolução As abordagens utilizadas pelos métodos de SR procuram estabelecer um processo inverso ao processo de captura de um sistema de imagem. As câmeras digitais usam um modelo que captura observações do mundo real gerando imagens digitais. No entanto, durante o processo perdas naturais ocorrem no sinal observado. A primeira etapa no processo de captura é a discretização do sinal contı́nuo. A informação de entrada do sistema são múltiplas imagens com possı́veis deslocamentos entre si. Ao passar pelo sistema óptico, as observações capturadas passam pelas lentes da câmera sofrendo efeitos de “borrão”(blur ). Atingindo o sensor as imagens tem a sua resolução reduzida, além de ter parte da informação alterada por ruı́do. Finalmente, depois de todo processo, as imagens são apresentadas à saı́da do sistema. Considerando uma imagem de AR X = T [x1 , x2 , ..., xN ] , amostrada acima da taxa de Nyquist, de tamanho L1 N1 × L2 N2 representada por um vetor unidimensional, rearranjado em ordem lexicográfica, onde, N = L1 N1 × L2 N2 e, L1 e L2 são, respectivamente, os fatores de escala horizontais e verticais, as amostras de BR geradas possuem tamanho N1 × N2 . A k-ésima observação de baixa resolução pode ser descrita por, T Yk = [yk,1 , yk,2 , ..., yp,M ] , onde k = 1, 2, ..., p e M = N1 × N2 . Sendo X constante, exceto pela degradação e pelos deslocamentos, o modelo de observação pode ser representado por: Yk = Dk Bk Mk X + nk , para 1 ≤ k ≤ p (1) onde, Mk , de tamanho L1 N1 L2 N2 × L1 N1 L2 N2 , é a matriz de encapsulamento, Bk , de tamanho L1 N1 L2 N2 × L1 N1 L2 N2 , a matriz de Blur, Dk , de tamanho (N1 N2 )2 ×L1 N1 L2 N2 , matriz de redução de resolução e, nk o vetor que reproduz o ruı́do do processo. Geralmente, os deslocamentos contidos no processo de captura podem ser variados - translação, rotação ou transformações afins. Esses deslocamentos são codificados pela matriz Mk . O blur causado pelo conjunto óptico são modelados em Bk , e os operadores de redução de resolução, que definirão as dimensões da observação, são definidos por Dk . O grande desafio da SR se dá ao fato de que a matrizes representadas por Dk , Bk e Mk são muito esparsas, além desse sistema linear ser tipicamente um problema mal posto. Em sistemas reais de captura essas matrizes são desconhecidas (Milanfar, 2010). Portanto, o método de SR deve ser capaz de estimar, de maneira eficaz, cada uma dessas matrizes, e com base nas observações de BR disponı́veis, buscar reverter da melhor forma o processo de captura, reproduzindo a cena de AR observada. O registro é o processo de mapeamento das imagens sobre um mesmo plano de referência. Esse mapeamento é uma etapa crucial para as técnicas de SR (Baboulaz e Dragotti, 2009). As frações deslocamento no conjunto de imagens devem ser inferiores ao tamanho de um pı́xel (sub-pı́xel), portanto os métodos para estimativa desses deslocamentos devem ser precisos. A fase de reconstrução pode ser dividida em interpolação e restauração. Após o registro das imagens, estas são posicionadas em um plano de alta resolução proporcional a um fator de escala escolhido. Este processo é chamado de interpolação. A imagem resultante desse processo pode apresentar imperfeições, devido aos equı́vocos no registro das imagens ou a falta de imagens relevantes para o problema. Por isso, a restauração tem como objetivo tratar as incertezas do processo oferecendo uma imagem de AR com mais qualidade. 2.1 Registro O registro de imagens pode ser definido como o mapeamento entre duas imagens, tanto espacialmente, quanto a nı́vel de intensidade (Brown, 1992). Através de modelos de transformação é possı́vel a combinação das imagens em um alinhamento geométrico comum. Como as técnicas de SR utilizam múltiplas imagens com movimentações mı́nimas entre elas é necessário que o registro em um plano comum seja preciso, com isso é possı́vel a reconstrução eficaz da imagem de AR. As diferenças entre as imagens podem ser causadas por tipos variados de transformações como translação (vertical e horizontal), rotação, escala e transformações afins. Nas sessões abaixo os quatro métodos avaliados no trabalho são brevemente descritos, todos eles trabalham com a estimativa de transformações apenas de translação e rotação. Outros tipos de transformações não são comuns em problemas de SR. Como o conjunto imagens de BR devem apresentar diferenças mı́nimas entre sı́, geralmente imagens que apresentam transformações afins tendem a não contribuir com informações relevantes ao problema de reconstrução. 2.1.1 Keren O método espacial de estimativa de rotação e translação entre duas imagens proposto por (Keren et al., 1988) usa uma abordagem iterativa baseando-se nas expansões da série de Taylor. Visando a precisão do método, um esquema piramidal de escalas é utilizado. Primeiramente os parâmetros são calculados para uma escala pequena (geralmente 64x64) e em seguida a cada iteração do algorı́timo os parâmetros são interpolados e reajustados para escalas superiores, até que se atinja a escala da imagem original. 2.1.2 Marcel O registro de imagens desenvolvido por (Marcel et al., 1997) é um método baseado no domı́nio da frequência. A ideia chave consiste em representar as transformadas de Fourier de ambas imagens em coordenadas polares. Nesse novo plano de coordenadas é possı́vel obter duas funções que se diferenciarão por um deslocamentos de translação correspondente ao ângulo de rotação entre as imagens. Para detectar a translação entre as funções, um método de correlação de fase é aplicado obtendo o ângulo de rotação entre as imagens. Após a estimativa da rotação, a transformada de Fourier da imagem a ser registrada é contra rotacionada, e novamente a correlação de fase é aplicada para calcular os parâmetros de translação. 2.1.3 Lucchese A proposta de (Lucchese e Cortelazzo, 2000) se baseia na propriedade que, a magnitude da transformada de Fourier de uma imagem, e a magnitude espelhada da transformada de Fourier da sua versão rotacionada, possuem um par de linhas ortogonais de passagem pela origem. A estimativa de rotação se dá em três etapas. Na primeira, a transformada de Fourier das imagens é expressa em coordenadas polares (assim como em (Marcel et al., 1997)) com o objetivo de detectar o declive formado pelas linhas ortogonais que passam pelas origens. Esse ângulo é estimado através da construção de um histograma contendo a distribuição dos ângulos, onde é esperado que esse histograma mostre um pico de correspondência do declive das duas linhas. Então o histograma é recalculado em uma imagem com resolução maior, concentrandose ao redor da primeira estimativa. O refinamento final se dá pela aplicação de uma regressão linear. Por fim deslocamentos horizontais e verticais estão estimados utilizando um método padrão de correlação de fase. 2.1.4 Vandewalle O método proposto por (Vandewalle et al., 2006) também trabalha no domı́nio da frequência utilizando coordenadas polares. O método considera que o ângulo de rotação entre as imagens é o ângulo onde a correlação máxima entre as imagens é atingida uma vez que a imagem a ser registrada é rotacionada por esse ângulo. Para medir a correlação, uma função calcula o conteúdo de frequência para valores de ângulo variados, através da integração por linha radiais, para ambas imagens. O ponto que indica o valor máximo de correlação entre elas indica a diferença de rotação. Para que valores proporcionais sejam calculados, o cálculo é limitado a um raio circular inferior ao raio da imagem e valores de baixa frequência são descartados abaixo de um limiar. Uma vez que a rotação é estabelecida, o deslocamento transacional entre as imagens é calculado através do o declive da diferença de fase entre as imagens no domı́nio da frequência. 2.2 Reconstrução A partir do registro das imagens, os métodos de reconstrução fazem a fusão das imagens de BR em uma única imagem de AR. O principal objetivo é tratar as incertezas provenientes do modelo de observação utilizado na captura das imagens de BR. A abordagem comumente utilizada é baseada em processos iterativos de otimização que fazem o refinamento da imagem de AR comparando-a com as imagens de BR. Além disso, as abordagens se diferem com os termo de regularização que são adicionados a função objetivo do problema, como restrições ao problema. Esses termos tem o objetivo de adicionar informações a priori ao problema que auxiliarão a convergência do método. 2.2.1 Iterative Back Projection O método de reconstrução formulado por (Irani e Peleg, 1991), chamado de “retroprojeção iterativa”, ou iterative back-projection (IBP) a imagem de AR é estimada pela retroprojeção da diferença (o erro) entre a simulações de BR, provenientes da imagem de AR gerada (utilizando operações de blur ), e as imagens de BR originais. O primeiro passo é gerar uma suposição da imagem de AR e então por meio de um processo de otimização iterativo a imagem de AR é repetidamente refinada pelo erro encontrado até que um critério de parada seja atingido. 2.2.2 Total Variation O segundo método se baseia na aplicação da “Variação Total”, ou Total Variation (TV) proposta por (Rudin e Osher, 1994) como termo de regularização na reconstrução da imagem de AR. A norma TV utiliza o gradiente como uma função de penalização. A quantidade total de mudança da imagem é penalizada pela norma L1 da magnitude do gradiente da intensidade da imagem. A tendência da aplicação da TV é uma imagem mais nı́tida, preservando as bordas da imagem. 2.2.3 Robust super-resolution A proposta de (Zomet et al., 2001) introduz uma mudança no estimador (processo de otimização do método) da SR, aplicando a mediana do erro no critério de avaliação do resultado, ao invés da aplicação padrão que se utiliza da média. A abordagem resulta em um estimador robusto contribuindo para a redução do erro causado pelas estimativas inconsistentes do processo de captura das imagens de BR. A utilização da mediana, além Tabela 2: Movimentos de translação (∆x, ∆y) e rotação (θ em graus) em relação a imagem de referência e oito imagens dos casos de teste 3 e 4, para 8 imagens de baixa relo Caso 3 4 Figura 1: Exemplo das imagens utilizadas. Tabela 1: Casos de teste propostos para os experimentos. Caso 1 2 3 4 5 6 Imgens 4 2 16 8 36 18 Escala 2 2 4 4 6 6 Distribuição Proporcional Aleatório Proporcional Aleatório Proporcional Aleatório Dimensões 240x240 240x240 120x120 120x120 80x80 80x80 de produzir um aumento na robustez, é de baixo custo computacional e a perda em acurácia é imperceptı́vel. 2.2.4 Normalized Convolution A contribuição proposta por (Pham et al., 2006) está centralizada na aplicação da convolução normalizada, ou Normalized Convolution (NC) como termo de regularização. O método executa um ajuste polinomial robusto em uma vizinhança adaptativa. O sinal local é aproximado através de uma projeção em um subespaço gerado por um conjunto de funções de base. A aplicação do método garante melhorias na taxa sinal/ruı́do e minimiza as influências sofridas pelos erros ocorridos na fase de registro. 2.2.5 G-PMSR A abordagem proposta por (Maiseli et al., 2014) possui um termo de regularização com um expoente variável adaptativo em função da magnitude do gradiente. A abordagem assumida pelo método de reconstrução é local. Portanto, o expoente assume diferentes valores ao percorrer a imagem. Quando a magnitude do gradiente é alta (indicativo de regiões contendo bordas) o expoente assume valores elevados, e quando o gradiente apresenta baixa magnitude (indicativo de regiões homogêneas) o expoente tende a zero. O objetivo é que o método favoreça a preservação das bordas, bem como a redução do ruı́do em regiões homogêneas. 3 3.1 Experimentos Dados Um conjunto de 128 imagens foram selecionadas para avaliar os métodos de registro e reconstrução Mov ∆x ∆y θ ∆x ∆y θ iRef 0.00 0.00 0.00 0.00 0.00 0.00 i2 0.00 0.25 0.00 0.51 0.22 -0.68 i3 0.00 0.50 0.00 0.66 0.33 -1.65 i4 0.00 0.75 0.00 0.12 0.08 -2.27 i5 0.25 0.00 1.00 0.21 0.61 -3.68 i6 0.25 0.25 -1.00 0.42 0.31 -3.69 i7 0.25 0.50 1.00 0.68 0.56 1.41 i8 0.25 0.75 -1.00 0.19 0.59 -1.80 de imagens. A Figura 1 trás 15 exemplos das diferentes imagens utilizadas no conjunto de teste. O conjunto possuı́: 1 imagem sintética (adaptada do gráfico de resolução EIA 1956); 39 imagens aéreas e 28 imagens (Weber, 1997); 25 imagens termográficas (Morris et al., 2007); 35 imagens de ressonância magnética (NZBRI, 2015). As imagens aéreas foram escolhidas pois as regiões de interesse selecionadas nas imagens podem apresentar BR devido a distância entre o sensor e a cena. Já a escolha das imagens térmicas e de ressonância magnética, é motivada pelo fato de possuı́rem sensores de BR. Visando padronizar as imagens, todas foram convertidas para a escala de cinza em 8 bits e com resolução de 480x480 pı́xeis. Selecionada uma imagem, um conjunto de diferentes versões de BR é formado. Primeiramente, aplica-se efeitos de blur e ruı́do gaussiano, simulando as incertezas do processo de captura. Logo após, a resolução é reduzida com pequenas diferenças nos valores dos operadores de translação e rotação, produzindo imagens de BR com mı́nimas diferenças a nı́vel de sub-pı́xel. O processo é repetido para as todas as imagens em 6 diferentes cenários de teste (detalhados à seguir), gerando ao todo um total de 768 conjuntos de teste, aplicados tanto aos métodos de registro quanto aos de reconstrução. Após a fase de avaliação, um experimento é realizado combinando os métodos que se destacaram nas etapas de registro e reconstrução. O objetivo é verificar a viabilidade dessa combinação na SR. Um conjunto de imagens de BR com deslocamentos desconhecidos é utilizado. O exemplo das imagens utilizadas pode ser visto na Figura 2. 3.2 Casos de Teste Ao todo seis casos de teste (Tabela 1) foram propostos considerando, a quantidade de imagens de BR, fator de escala e distribuição das imagens no plano de AR. Esses três fatores influenciam diretamente no processo de reconstrução da imagem de AR. Um maior número de imagens com diferenças de deslocamento proporcionais auxilia à um melhor resultado do método de reconstrução. O inverso acarreta em maiores desafios aos métodos. Portanto, para cada um dos três valores de fator escala escolhidos (2, 4 e 6), dois ambientes são propostos com diferentes nı́veis de dificuldade para a reconstrução da imagem de AR, onde os casos de teste de numeração par possuem maiores desafios Tabela 3: Comparação da média (µ) e desvio padrão (σ) da REQM na estimação dos movimentos de translação (∆x, ∆y) e rotação (θ em graus), pelos métodos de registro avaliados, levando em consideração 6 casos de teste, executados para as 128 imagens. Caso ∆x µ σ 0.14 0.18 0.25 0.22 0.31 1.13 0.28 0.21 0.43 0.87 0.33 0.28 1 2 3 4 5 6 Keren ∆y µ σ 0.16 0.16 0.24 0.20 0.46 1.86 0.35 0.30 0.79 2.53 0.40 0.37 θ µ 0.20 0.22 0.65 0.75 1.29 1.30 σ 0.13 0.19 0.33 0.39 1.29 0.58 ∆x µ σ 3.99 10.98 3.82 12.19 12.83 10.70 12.33 11.36 11.31 7.73 11.86 8.20 Marcel ∆y µ σ 11.08 22.90 6.92 20.02 12.58 10.34 12.55 11.74 10.96 6.90 11.78 7.57 θ µ 0.71 0.65 4.06 10.27 16.99 19.76 σ 0.00 0.38 17.57 42.60 47.22 54.28 ∆x µ σ 19.04 23.49 17.65 25.77 17.46 13.68 19.75 14.59 18.53 6.30 17.63 7.21 Lucchese ∆y µ σ 21.54 25.52 16.39 25.25 18.31 13.60 19.77 14.84 18.14 6.09 18.11 6.94 θ µ 18.37 15.15 30.11 32.72 42.37 40.79 σ 20.54 20.76 23.67 25.78 13.26 15.06 ∆x µ σ 0.18 0.17 0.22 0.18 0.21 0.17 0.24 0.13 0.25 0.17 0.26 0.15 Vandewalle ∆y µ σ 0.19 0.15 0.23 0.18 0.21 0.13 0.27 0.13 0.26 0.14 0.29 0.14 θ µ 2.35 2.15 4.05 4.43 5.72 6.10 σ 5.28 5.16 6.86 7.60 7.57 8.05 Tabela 4: Comparação da média da Raiz do Erro Quadrático Médio na estimação dos movimentos de translação (∆x, ∆y) e rotação (θ em graus), pela associação dos métodos Keren e Vandewalle, levando em consideração 6 casos de teste, executados para as 128 imagens. Caso 1 2 3 4 5 6 ∆x µ 0.09 0.19 0.12 0.19 0.17 0.20 Keren/Vandewalle ∆y θ σ µ σ µ σ 0.08 0.09 0.08 0.20 0.13 0.14 0.21 0.14 0.22 0.19 0.08 0.13 0.09 0.65 0.33 0.08 0.22 0.10 0.75 0.39 0.11 0.17 0.10 1.29 1.29 0.10 0.22 0.10 1.30 0.58 às técnicas de SR. A Tabela 2 exemplifica os movimentos determinados para gerar 8 imagens de BR para os casos de teste 3 e 4, a partir de uma das imagens de teste, mostrando a diferença quando valores proporcionais são atribuı́dos ou não. Com a padronização da resolução das imagens em 480x480 pı́xeis, para fatores de escala maiores as imagens de BR geradas apresentam menores resoluções, dificultando o processo de registro e reconstrução. 3.3 Resultados Cada um dos métodos de registro foram avaliados para os seis casos de testes aplicado a cada uma das 128 imagens selecionadas. A Tabela 3 mostra os resultados obtidos para testes com os métodos de registro. A Raiz do Erro Quadrático Médio (REQM) e o Desvio Padrão foram as métricas utilizas para avaliação. As transformações foram avaliadas separadamente, translação horizontal, translação vertical e rotação. Os resultados demonstram que o método proposto por (Keren et al., 1988) é superior para estimar a transformação de rotação, apresentando melhores resultados em todos os casos de teste. Considerando, a estimativa das transformações de translação o método que se mostra superior é o (Vandewalle et al., 2006). Como o processo de estimar as transformações de rotação e translação podem ser separados, um novo teste foi realizado nos mesmos critérios anteriores. Uma abordagem hı́brida foi utilizada associando os dois métodos que se destacam nos primeiros experimentos, onde a rotação é estimada através do método de (Keren et al., 1988) e a translação pelo método de (Vandewalle et al., 2006). O resultado é demonstrado na Tabela 4. É possı́vel observar que não há ganho na estimativa da rotação em relação ao método (Keren et al., 1988), uma vez que a rotação é a primeira (a) (b) (c) Figura 2: Resultado da aplicação da SR em um problema desconhecido. (a) amostra do conjunto de imagens de BR, reescaladas pelo método do vizinho mais próximo; (b) Interpolação Bicúbica; (c) Método de SR. a ser estimada na etapa de registro. Porém, os resultados relativos a translação foram todos aprimorados se comparados aos resultados do método de (Vandewalle et al., 2006). Portanto, esta foi a abordagem que apresentou o melhor desempenho na etapa de registro. Para avaliação da etapa de reconstrução, os métodos receberam os movimentos reais de rotação e translação entre as imagens de BR simuladas. Esses também foram submetidos aos seis casos de testes, utilizando a Raiz do Erro Quadrático Médio (REQM) e também a Relação Sinal/Ruı́do de Pico (RSRP) como critérios de avaliação. Através dos resultados obtidos (Tabela 5) o método que consegue reproduzir a imagem original de AR com maior eficácia é o método proposto por (Maiseli et al., 2014). Observando os resultados obtidos, a melhor combinação para o processo de SR é formada pela abordagem hı́brida que associa os métodos (Keren et al., 1988) e (Vandewalle et al., 2006) para o registro e o método de (Maiseli et al., 2014) para a etapa de reconstrução. Essa combinação foi utilizada em um conjunto de imagens de BR com movimentações desconhecidas para gerar a imagem de AR com um fator de escala de 6. O resultado obtido é apresentado na Figura 2. O conjunto de imagens consiste de 29 imagens de 40x57 pı́xeis de resolução. Nas duas primeiras colunas é possı́vel perceber que o texto está ilegı́vel. Porém, com a aplicação da SR o conteúdo da cena, o texto em questão, é claramente percebido. 4 Conclusões O presente trabalho apresentou um estudo de métodos que abordam as duas fases da SR com múltiplas imagens, registro e reconstrução. Ao todo quatro métodos de registro de imagens e cinco métodos de reconstrução foram analisados. Através Tabela 5: Comparação do REQM médio e RSRP média, pelos métodos de reconstrução avaliados, levando em consideração 6 casos de teste, executados para as 128 imagens. Caso 1 2 3 4 5 6 Iterative Back Projection REQM RSRP 9.72 29.88 9.87 29.74 14.80 25.43 16.04 24.87 23.30 21.84 21.22 22.07 Total Variation REQM RSRP 7.83 31.69 12.03 27.32 13.66 26.22 16.17 24.65 17.91 24.02 23.76 22.25 Robust super-resolution REQM RSRP 9.71 29.89 9.87 29.74 14.77 25.57 16.13 24.85 24.51 22.24 19.27 23.21 dos experimentos realizados pode-se perceber a superioridade da abordagem hı́brida da associação dos métodos de (Keren et al., 1988) e (Vandewalle et al., 2006) na etapa de registro e do método desenvolvido por (Maiseli et al., 2014) na reconstrução. A combinação dos métodos aplicados a um problema real de SR trouxe bons resultados para um aumento de resolução em seis vezes. Agradecimentos Os autores agradecem ao Instituto Federal do Norte de Minas Gerais, à Universidade Federal de Minas Gerais e ao CNPQ, pelo suporte à realização do trabalho. O presente trabalho foi realizado com o apoio financeiro da CAPES - Brasil. Referências Baboulaz, L. e Dragotti, P. L. (2009). Exact feature extraction using finite rate of innovation principles with an application to image super-resolution, Image Processing, IEEE Transactions on 18(2): 281–298. Brown, L. G. (1992). A survey of image registration techniques, ACM computing surveys (CSUR) 24(4): 325–376. Chen, T., Catrysse, P. B., El Gamal, A. e Wandell, B. A. (2000). How small should pixel size be?, Electronic Imaging, International Society for Optics and Photonics, pp. 451–459. Cossairt, O. (2011). Tradeoffs and limits in computational imaging, PhD thesis, Columbia University. Irani, M. e Peleg, S. (1991). Improving resolution by image registration, CVGIP: Graphical models and image processing 53(3): 231– 239. Keren, D., Peleg, S. e Brada, R. (1988). Image sequence enhancement using sub-pixel displacements, Computer Vision and Pattern Recognition, 1988. Proceedings CVPR’88., Computer Society Conference on, IEEE, pp. 742–746. Lucchese, L. e Cortelazzo, G. M. (2000). A noiserobust frequency domain technique for estimating planar roto-translations, Signal Pro- Normalized Convolution REQM RSRP 9.08 30.20 10.62 28.55 15.37 25.02 17.38 23.93 19.98 22.67 21.50 22.01 G-PMSR REQM RSRP 7.34 32.51 11.52 27.75 11.57 27.77 14.30 25.75 14.19 25.91 16.58 24.49 cessing, IEEE Transactions on 48(6): 1769– 1786. Maiseli, B., Elisha, O., Mei, J. e Gao, H. (2014). Edge preservation image enlargement and enhancement method based on the adaptive perona–malik non-linear diffusion model, IET Image Processing 8(12): 753–760. Marcel, B., Briot, M. e Murrieta, R. (1997). Calcul de translation et rotation par la transformation de fourier, TS. Traitement du signal 14(2): 135–149. Milanfar, P. (2010). CRC Press. Super-resolution imaging, Morris, N. J., Avidan, S., Matusik, W. e Pfister, H. (2007). Statistics of infrared images, Computer Vision and Pattern Recognition, 2007. CVPR’07. IEEE Conference on, IEEE, pp. 1–7. NZBRI, N. Z. B. R. I. (2015). Magnetic resonance imaging at 3 tesla - the first in new zealand. Pham, T. Q., Van Vliet, L. J. e Schutte, K. (2006). Robust fusion of irregularly sampled data using adaptive normalized convolution, EURASIP Journal on Applied Signal Processing 2006: 236–236. Rudin, L. I. e Osher, S. (1994). Total variation based image restoration with free local constraints, Image Processing, 1994. Proceedings. ICIP-94., IEEE International Conference, Vol. 1, IEEE, pp. 31–35. Vandewalle, P., Sü, S., Vetterli, M. et al. (2006). A frequency domain approach to registration of aliased images with application to superresolution, EURASIP Journal on Advances in Signal Processing 2006. Weber, A. G. (1997). The usc-sipi image database: Version 5, original release: October 1997, signal and image processing institute, university of southern california, department of electrical engineering. Zomet, A., Rav-Acha, A. e Peleg, S. (2001). Robust super-resolution, Computer Vision and Pattern Recognition, 2001. CVPR 2001. Proceedings of the 2001 IEEE Computer Society Conference on, Vol. 1, IEEE, pp. I–645.
Download