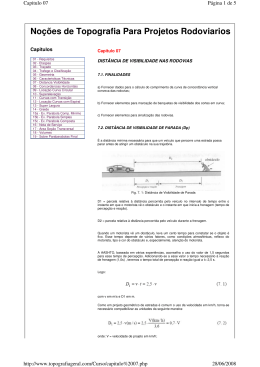
DIRETRIZES PARA O DESENVOLVIMENTO DE UM SISTEMA AVANÇADO PARA ESTUDOS E PROJETOS VIÁRIOS: ANÁLISE DA VISIBILIDADE DE ULTRAPASSAGEM VERTICAL Fernando Fraga de Freitas dos Santos Daniel Sergio Presta García Marcelo André Wandscheer DIRETRIZES PARA O DESENVOLVIMENTO DE UM SISTEMA AVANÇADO PARA ESTUDOS E PROJETOS VIÁRIOS: ANÁLISE DA VISIBILIDADE DE ULTRAPASSAGEM VERTICAL Fernando Fraga de Freitas dos Santos STE – Serviços Técnicos de Engenharia S.A. Daniel Sergio Presta García Universidade Federal do Rio Grande do Sul Marcelo André Wandscheer CIENGE – Consultoria em Informática e Engenharia Ltda. RESUMO A malha rodoviária pavimentada brasileira é, predominantemente, constituída de rodovias de pista simples. As rodovias de pista simples favorecem a ocorrência de acidentes mais graves como, por exemplo, colisões frontais, principal causa de morte nas estradas federais brasileiras. A sinalização horizontal/vertical é o principal fator considerado pelo condutor do veículo na tomada de decisão de uma ultrapassagem. Normas de projeto (geométrico e de sinalização) estabelecem distâncias mínimas de visibilidade que permitem uma ultrapassagem segura. Desde 1986, o método gráfico de análise da visibilidade vertical indicado pelo DENATRAN, DNER (e seu sucessor DNIT) apresenta um erro de concepção. O mais grave é que este erro está contra a segurança e o dimensionamento das zonas, com restrição de ultrapassagem subdimensionada. O presente artigo apresenta o erro detectado na norma, identifica em que situações o mesmo é mais grave e propõem um método computacional/matemático para análise da visibilidade. ABSTRACT The Brazilian’s paved highway net is predominantly consisting of rural two-lane highways. Rural two-lane highways benefit the occurrence of more serious accidents such as collisions, the main cause of death in Brazilian’s federal roads. Horizontal/vertical signaling is the main factor considered by the driver of the vehicle in the decision-making process of an override. Project standards (geometric and signage) establish minimum distances of visibility that allow safe overtaking. Since 1986, the graphical method of analysis of the vertical visibility indicated by DENATRAN, DNER (and its successor DNIT) presents a design error. The most serious is that this error is against security and scalability with overtaking restriction zones undersized. This article presents the error detected in standard, identifies in which situations the same is more serious and propose a computational/mathematic method to analysis of visibility. 1. INTRODUÇÃO A malha rodoviária pavimentada brasileira é, predominantemente, constituída de rodovias de pista simples. Segundo o DNIT (2013), dos 65.319,6 km da rede pavimentada sob a jurisdição federal, 58.709,4 km são de pista simples, o que equivale a 89,9% do total. Segundo o IPEA (2006), as rodovias de pista simples favorecem a ocorrência de acidentes mais graves como, por exemplo, colisões frontais, principal causa de morte nas estradas federais (33 vítimas para cada 100 colisões). A elevada mortalidade em acidentes viários vem sendo considerada como um problema de saúde pública e, conforme Ministério da Saúde (2007), no Brasil toma aspectos de uma verdadeira epidemia. Segundo dados do DNIT (2010) dos 182.900 acidentes registrados em rodovias federais no ano de 2010, 5.312 (2,9%) foram classificados no tipo de acidente colisão frontal. Embora não conste entre os cinco tipos de acidentes de maior ocorrência, percebe-se a sua relevância ao observar os números referentes a acidentes com mortes: 1.514 para um total de 7.073, no mesmo período. Mais de 21% das mortes em rodovias federais decorre de colisões frontais. São inúmeros os fatores que contribuem para a ocorrência de uma colisão frontal. A sinalização horizontal/vertical, com a caracterização dos locais onde é permitida ou proibida a 1 ultrapassagem, é o fator mais relevante na tomada de decisão do condutor do veículo. A proibição de ultrapassagem decorre da análise planialtimétrica do projeto da via, tendo como referência distâncias mínimas de ultrapassagem, segundo a velocidade de projeto, a altura de visão do condutor e do objeto observado. O método gráfico de análise da visibilidade vertical, indicado pelo DENATRAN e DNER (e seu sucessor DNIT), apresenta um erro de concepção desde 1986. O mais grave é que este erro está contra a segurança e o dimensionamento das zonas, com restrição de ultrapassagem subdimensionado. O presente artigo apresenta o erro detectado na norma, identifica em que situações o mesmo é mais grave e propõem um método computacional para análise da visibilidade. 2. ANÁLISE DA VISIBILIDADE VERTICAL PELO MÉTODO GRÁFICO O método gráfico para análise da visibilidade vertical é recorrente nos manuais e normas de projeto geométrico e de sinalização no Brasil, desde 1986, não aparecendo na principal referência a estas normas, a AASHTO (2004) e versões anteriores. Das publicações oficiais, apenas as Normas para o Projeto das Estradas de Rodagem, editadas em 1950 e reeditadas em 1973 DNER (1973), não apresentam o método gráfico como método de análise da visibilidade vertical. O método, que continua válido até os dias de hoje, é apresentado de diferentes formas, conforme a publicação, mas com o mesmo equívoco conceitual. A seguir são apresentadas figuras e textos extraídos dos manuais com peculiaridades de cada publicação. 2.1. Manual de Sinalização de Trânsito – DENATRAN (1986) Em DENATRAN (1986) não há nenhuma menção à análise por um método gráfico e nem indicação de construção de um gabarito para esta. A informação presente no texto “curvas verticais – a distância na qual um objeto, situado num ponto a 1,20m acima da superfície do pavimento, e numa tangente a curva, possa ser visto de outro ponto situado à mesma altura e na mesma tangente...” está correta, contudo, remete à Figura 1 onde são representados os pontos acima do greide de pavimento, em perfil e a distância de visibilidade mínima (dv.min.) é indicada de forma errônea. Figura 1: Análise da distância de visibilidade vertical – fonte DENATRAN, 1986 2 É possível observar na Figura 1 que a distância em questão está sendo medida sobre o alinhamento do perfil (inclinada) e não em projeção horizontal. Como, usualmente, a representação altimétrica utiliza uma escala deformada (vertical 10 vezes maior que a horizontal) é impossível estabelecer qualquer medida que não seja paralela a um dos eixos. 2.2. Manual de Projeto Geométrico de Rodovias Rurais – DNER (1999a) O Manual de Projeto Geométrico de Rodovias Rurais também não faz menção aos termos ‘método gráfico’ ou ‘gabarito’. No texto, altera os valores da altura dos olhos do motorista do carro de passeio para o valor de 1,10m e a altura do veículo que se desloca em sentido contrário para 1,37. Menciona, ainda, valores mais atualizados. A Figura 2, na sua parte inferior, sugere, pela primeira vez, a construção de um gabarito ao informar “mantenha aqui a linha de 1,10m”. É possível, ainda, observar que o gabarito, com dimensões próximas a um retângulo alongado, está inclinado, indicando a possibilidade (errônea) de medições de distância alinhadas ao greide. Figura 2: Análise da distância de visibilidade vertical – fonte DNER, 1999a 2.3. Manual Sinalização Rodoviária – DNER (1999b) O Manual de Sinalização Rodoviária (DNER, 1999b) retoma os valores de 1,20 metros para altura do observador e do veículo no sentido contrário, é o primeiro a propor a construção de um gabarito, conforme parte inferior da Figura 3 e indicar um passo a passo de sua utilização: A delimitação dos segmentos em perfil é feita posicionando-se o gabarito com os círculos A e B tangentes, em sua parte inferior, à linha de greide... Deslocando-se o referido gabarito, até que a linha que une os centros dos círculos A e B toque a linha de greide, obtém-se os pontos A1 (início de proibição para o sentido A-B) e B2 (final de proibição para o sentido B-A). Prosseguindo-se o deslocamento do gabarito no mesmo sentido, até que a linha que une os círculos A e B volte a tangenciar a linha de greide, obtém-se então os pontos A2 (final de proibição para o sentido A-B) e B1 (início de proibição para o sentido B-A). 3 Figura 3: Aplicação do método gráfico em perfil – fonte DNER, 1999b 2.4. Manual Brasileiro de Sinalização de Trânsito – CONTRAN (2007) O método gráfico no Manual Brasileiro de Sinalização de Trânsito (CONTRAN, 2007) passa a incluir uma nova informação com erro. Ao observar o gabarito sendo aplicado no detalhe do greide da Figura 4, é possível observar que as alturas não estão mais dispostas em projeção vertical. A inclinação apresentada, pelo condutor e pelo veículo no sentido contrário, na escala deformada, faz com que os mesmos retrocedam em vários metros em relação à estaca de análise. O passo a passo para aplicação do método é descrito a seguir: Para determinar a zona de proibição de ultrapassagem numa curva vertical, considera-se o perfil da rodovia e a sua velocidade regulamentada procedendo-se conforme descrito a seguir: 1. Elabora-se o esquema gráfico do perfil da rodovia; 2. Considera-se que a altura do olho do observador em relação ao pavimento, é de 1,20 m; 3. Considera-se a velocidade regulamentada na rodovia; 4. Pela Tabela 1, identifica-se a distância de visibilidade; 5. Constrói-se uma “régua”, em escala gráfica, com o comprimento da distância de visibilidade e, nas duas extremidades, segmentos verticais de 1,20 m cada (altura do olho do observador em relação ao pavimento), conforme Figura 1; 6. Toma-se o perfil da rodovia em escala gráfica; 7. Aplica-se a “régua” ao perfil, deslizando-se de tal forma que as bases inferiores dos segmentos verticais sejam mantidas na linha do perfil. 4 • • • Enquanto a barra horizontal referente à distância mínima estiver acima do perfil, a visibilidade está garantida. Quando a barra horizontal tangenciar e passar a cortar o perfil, não há visibilidade mínima garantida, determinando, no início da “régua” (Ponto 1) o começo da proibição de ultrapassagem para o sentido do caminhamento. Quando a barra horizontal voltar a tangenciar o perfil, determina-se no fim da “régua” (Ponto 2) o término da proibição de ultrapassagem (Figura 1). Figura 4: Aplicação do método gráfico em perfil – fontes CONTRAN, 2007 e DNIT, 2010 2.5. Manual de Sinalização Rodoviária – DNIT (2010) O Manual de Sinalização Rodoviária (DNIT, 2010) utiliza a Figura 4, também empregada em CONTRAN (2007). O passo a passo para aplicação do método gráfico altera-se um pouco, conforme texto a seguir: Desenha-se uma régua, em papel transparente, nas mesmas escalas do projeto geométrico em perfil, horizontal e vertical, com o comprimento da distância de visibilidade e, nas duas extremidades, segmentos verticais de 1,20 m (altura do olho do observador); Aplica-se a régua ao perfil, fazendo-a deslizar ao longo do estaqueamento; Enquanto a barra horizontal, referente à distância mínima de visibilidade, estiver acima do perfil da rodovia, a visibilidade está garantida; Onde a barra horizontal tangenciar o perfil, caracteriza a ausência das condições de visibilidade, com o início do trecho de proibição de ultrapassagem, no sentido do estaqueamento, e o fim do trecho de proibição de ultrapassagem, no sentido oposto; Prossegue-se deslizando a régua sobre o perfil, até que volte a tangenciar o perfil, definindo o fim do trecho de proibição de ultrapassagem, no sentido do estaqueamento, e o início do trecho de proibição de ultrapassagem, no sentido oposto. 5 3. DIRETRIZES DA PESQUISA O presente trabalho parte da premissa de que o método gráfico utiliza de forma errônea a distância mínima de visibilidade, através do uso de um gabarito. O termo distância, em engenharia, refere-se, usualmente, à distância em projeção horizontal e não à distância em verdadeira grandeza (terminologia utilizada na geometria descritiva). Os manuais, através das figuras disponibilizadas, dão a entender que a distância a ser empregada segue o alinhamento da visada do condutor. O erro decorre do fato de ser usual, em projetos geométricos, a deformação da escala vertical (10 vezes superior a escala horizontal), o que impede a obtenção de qualquer medida que não esteja alinhada com os eixos. Este equívoco conceitual tem impacto direto no dimensionamento dos locais com proibição de ultrapassagem. O gráfico da Figura 5 apresenta distâncias de visibilidades mínimas, para as classes de rodovias II e III, com velocidade diretriz entre 40 e 100 km/h, segundo DNER (1999a). Para exemplificar o funcionamento do gráfico, ao tomar-se a distância de visibilidade (na visada, ou seja, inclinada) de 140 metros (utilizada em rampas de 8%, na escala natural) percebe-se que seu equivalente em projeção horizontal é 139,55 metros (0,33% menor). Na escala deformada, o equivalente à distância de visibilidade (na visada) é de 178,72 metros, ou seja, 38,72 metros a mais (representada pelo segmento de linha em vermelho). Compreende-se pelo gráfico da Figura 5 que é irrelevante a diferença entre a distância de visibilidade (na visada) e sua equivalente em projeção horizontal. Na escala deformada, verifica-se um subdimensionamento significativo do valor da medida do gabarito, fazendo com que este não corresponda ao valor necessário. Figura 5: Visibilidade na visada, em projeção horizontal e em escala deformada – fonte autor A Figura 6 indica o problema relacionado com a utilização do método gráfico para uma condição específica de rodovia. No exemplo, a avaliação por gabarito (Figura 6a) resulta na aprovação de visibilidade vertical na estaca 0+360, para uma distância de visibilidade mínima de 140 metros, altura dos olhos do condutor e do veículo no sentido contrário de 1,20 metros. Utilizando a distância mínima de visibilidade em projeção horizontal e as alturas em projeção vertical, é possível observar na Figura 6b que a linha de visada (em azul) cruza com a linha de greide (em vermelho), caracterizando a impossibilidade de visibilidade na estaca 0+360. 6 (a) (b) Figura 6: Confronto entre método gráfico (a) e computacional/matemático (b) – fonte autor Esta falha no método gráfico será objeto de pesquisa do presente trabalho. As diretrizes para desenvolvimento deste são descritas nos próximos itens. 3.1. Objetivos O objetivo principal é expor e caracterizar o erro do método gráfico na análise da distância de visibilidade de ultrapassagem vertical e no consequente subdimensionamento da proibição de ultrapassagem na sinalização horizontal. Como objetivos secundários têm-se: (i) a proposição de método matemático em substituição ao gráfico e (ii) a análise da repercussão do erro pelo método gráfico para diferentes rampas e projeções de concordâncias verticais. 3.2. Delimitações Para avaliar a repercussão do erro do método gráfico serão consideradas algumas delimitações no presente trabalho. Em primeiro lugar, serão analisadas rodovias da Classe II e III conforme DNER (1999a). Esta opção decorre do perfeito enquadramento de rodovias de pista simples nestas classes, visto que as Classes O e I contemplam vias expressas, duplicadas e até de pista simples de elevado padrão, e a Classe IV é recomendada para estradas vicinais, geralmente não pavimentadas. O estudo prevê rodovias implantadas em região plana, ondulada e montanhosa, não existindo limitação quanto ao relevo. A opção de classes e relevos possibilita uma amplitude de rampas máximas de 3% a 8%, conforme observado na Tabela 1. Tabela 1: Rampas máximas Classe da Rodovia Classe O Classe I Classe II Classe III Classe IV-A Classe IV-B Plano 3% 3% 3% 4% 4% 6% RELEVO Ondulado 4% 4,5% 5% 6% 6% 8% Montanhoso 5% 6% 7% 8% 8% 10% A distância mínima de visibilidade de ultrapassagem é função da velocidade regulamentada. Para o estudo adotou-se a velocidade regulamentada como equivalente à velocidade diretriz. 7 Esta última apresenta valores na Tabela 2 em função da classe da rodovia e do relevo. Para o estudo serão adotadas velocidades entre 40 e 100 km/h. Tabela 2: Velocidade diretriz Classe da Rodovia Classe O Classe I Classe II Classe III Classe IV Plano 120 100 100 80 80-60 RELEVO Ondulado 100 80 70 60 60-40 Montanhoso 80 60 50 40 40-30 As tabelas 1 e 2 foram extraídas de DNER (1999a). A Tabela 3 apresenta os valores de distância mínima de visibilidade de ultrapassagem em função da velocidade regulamentada. Os dados da Tabela 3 foram retirados de DNIT (2010b) visto que são estes os efetivamente utilizados no projeto de sinalização horizontal e não os recomendados por DNER (1999a). Tabela 3: Distância mínima de visibilidade x velocidade regulamentada Velocidade regulamentada (km/h) 40 50 60 70 80 90 100 110 Distância mínima de visibilidade (m) 140 160 180 210 245 280 320 355 3.3. Delineamento O trabalho para avaliar a repercussão do impacto do subdimensionamento na avaliação da distância de visibilidade de ultrapassagem foi composto das etapas: (i) elaboração de método computacional/matemático de análise da distância de visibilidade de ultrapassagem, (ii) definição do intervalo de estudo, (iii) aplicação do método computacional/matemático sobre o intervalo de estudo – estudo de caso, (iv) aplicação do método gráfico sobre o intervalo de estudo – estudo de caso, (v) análise dos resultados, (vi) conclusões e recomendações. 4. MÉTODO PROPOSTO Como visto na seção 2, existem pequenas variações no método gráfico conforme, manual ou norma selecionados. Para fins de análise, o presente trabalho utilizou o método gráfico apresentado no Manual Brasileiro de Sinalização de Trânsito (CONTRAN, 2007) e o Manual de Sinalização Rodoviária (DNIT, 2010). Os valores de velocidade diretriz (Vd), rampa máxima e distância mínima de visibilidade foram extraídos do Manual de Projeto Geométrico de Rodovias Rurais (DNER, 1999a). 4.1. Elaboração do método computacional/matemático O núcleo da análise de visibilidade de ultrapassagem pelo método computacional/matemático é apresentado no diagrama da Figura 7. O método completo apresenta dois lopps externos, referentes ao sentido da via (sentido do estaqueamento ou contrário) e ao posicionamento da estaca de análise (do início ao fim do trecho analisado). 8 Figura 7: Diagrama da análise de visibilidade pelo método comp./matemático – fonte autor O diagrama da Figura 7 é utilizado na plataforma SAEPRO – Sistema Avançado para Estudos e Projetos Viários (García et al., 2014). Suas etapas são caracterizadas a seguir: • Define variáveis iniciais: são identificadas as variáveis, distância de visibilidade mínima de ultrapassagem, quilômetro inicial, final, e de teste e situação (configurada como valor booleano verdadeiro que indica que há visibilidade). Também são calculadas as cotas na posição do observador e do veículo no sentido contrário; • Chegou ao fim do segmento de estudo?: teste lógico que remete ao relatório final em caso afirmativo; • Processamento dos dados para nova posição: avalia para o quilômetro teste as cotas de visada e do greide. Para tanto, utiliza regra de três simples no cálculo da cota da altura da visada e o cálculo de greide (com cálculo de rampas e flechas sobre a curva de concordância vertical); • Cota da visada superior à cota do greide?: teste lógico. Em caso afirmativo, segue o fluxo normal da análise; em caso negativo interrompe o loop original e encaminha para o fim do processo; • Incrementa posição: avança o quilômetro teste. O intervalo de avanço pode ser ajustado entre valores discretos. Quanto menor o valor, maior a precisão da análise, mas também mais demorada. Recomenda-se valores entre 1 e 5 metros; • Indica problema de visibilidade: altera o status da variável booleana ‘situação’ para falso, representando não haver visibilidade para o quilômetro inicial, a partir do quilômetro teste; • Identifica situação do segmento: apresenta se há (verdadeiro) ou não (falso) visibilidade no quilômetro inicial. 9 4.2. Definição do intervalo de estudo A definição do intervalo do estudo decorre das delimitações da pesquisa. A Tabela 4 indica os testes a serem desenvolvidos, conforme as condicionantes de: (i) relevo, (ii) classe da rodovia, (iii) rampa máxima, (iv) velocidade diretriz e (v) distância mínima de visibilidade de ultrapassagem. Tabela 4: Valores adotados no estudo Testes Relevo Classe da Rodovia Rampa máxima Vd (km/h) Dist. mín. vis. (m) Teste 1 Teste 2 Plano Classe II 3% 100 320 Plano Classe III 4% 80 245 Teste 3 Ondulado Classe II 5% 70 210 Teste 4 Ondulado Classe III 6% 60 180 Teste 5 Montanhoso Classe II 7% 50 160 Teste 6 Montanhoso Classe III 8% 40 140 Além do intervalo de testes definido na Tabela 4, foi inserido no estudo o comportamento da curva de concordância vertical (definida através de sua projeção horizontal). Conforme pode ser observado na Figura 6, é em função da curva de concordância vertical convexa que se dá o problema de visibilidade vertical. Os valores adotados para teste estão compreendidos entre 50 e 600 metros, com valores discretos variando de 50 em 50 metros. A opção por este intervalo decorre da caracterização no seu extremo inferior de problemas de visibilidade de parada (que obrigatoriamente devem ser corrigidos na etapa do projeto geométrico) e, no extremo superior, da não observância de problemas de visibilidade de ultrapassagem. A escolha destes dois intervalos gera uma matriz de análise que pode ser observada no tópico a seguir. Os valores marcados em amarelo representam a faixa onde a curva de concordância vertical apresenta problemas de distância de visibilidade de parada. Os valores marcados em verde indicam a inexistência de problemas de visibilidade de ultrapassagem. Ambos os valores serão descartados no confronto entre os métodos. 4.3. Aplicação do método computacional/matemático Tanto para a aplicação do método computacional/matemático quanto para o método gráfico foram utilizadas as mesmas referências de greide. Para tanto foram definidos: • PP (ponto de partida): localizado no km 0+000 com cota 50 metros; • PI-1 (ponto de inflexão): localizado no km 0+500 com cotas entre 65 (rampa de 3%) a 90 metros (rampa de 8%) e projeções entre 50 e 600 metros com valores discretos de 50 em 50 metros; • PF (ponto final): localizado no km 1+000 com cota 50 metros, de forma a caracterizar a rampa em declive equivalente a anterior em aclive (situação considerada mais crítica). A Tabela 5, em sua parte inicial, indica para a matriz de testes as estacas (em quilômetros) onde a distância de visibilidade de ultrapassagem deixa de existir. Como exemplo, temos para o Teste 4 (rampa de 6%, Vd de 60 km/h e distância mínima de visibilidade de 180 metros – valores extraídos da Tabela 4) com curva de concordância vertical com projeção de 300 metros, o quilômetro 0+300 como a primeira estaca sem visibilidade de ultrapassagem. 10 Tabela 5: Resultados da análise de visibilidade Testes 50 Teste 1 Teste 2 Teste 3 Teste 4 Teste 5 Teste 6 0+220 0+280 0+320 0+340 0+360 0+360 Teste 1 Teste 2 Teste 3 Teste 4 Teste 5 Teste 6 Teste 1 Teste 2 Teste 3 Teste 4 Teste 5 Teste 6 Projeções (metros) 150 200 250 300 350 400 450 500 550 600 Primeira estaca sem visibilidade (método computacional/matemático - A) 0+220 0+200 0+200 0+200 0+180 0+180 0+180 0+160 0+160 0+160 0+160 0+280 0+280 0+260 0+260 0+240 0+240 0+240 0+240 VIS VIS VIS 0+300 0+300 0+300 0+280 0+280 0+260 0+260 VIS VIS VIS VIS 0+340 0+320 0+320 0+300 0+300 0+300 VIS VIS VIS VIS VIS 0+360 0+340 0+340 0+320 0+320 0+320 VIS VIS VIS VIS VIS 0+360 0+360 0+340 0+340 0+340 VIS VIS VIS VIS VIS VIS Primeira estaca sem visibilidade (método gráfico - B) 0+180 0+180 0+180 0+160 0+160 0+160 0+260 0+260 0+260 0+260 0+260 0+300 0+300 0+300 0+280 0+280 0+340 0+320 0+320 0+320 0+360 0+360 0+360 0+360 0+360 0+400 0+380 0+380 0+380 0+400 Diferença absoluta (metros) entre os métodos (B-A) 0 0 20 0 0 0 0 20 20 20 20 0 20 20 20 20 20 20 20 20 20 20 40 40 40 40 20 40 40 60 100 4.4. Aplicação do método gráfico O método gráfico utilizou a mesma configuração de greides adotada no método computacional/matemático. Sobre estes, foi aplicado gabarito retangular por técnico com experiência na área de projeto geométrico e de sinalização, de forma a identificar a primeira estaca onde é caracterizada a impossibilidade de visibilidade para a distância mínima de visibilidade de ultrapassagem, obtendo-se os dados constantes no centro da Tabela 5. Como já mencionado, os valores das regiões amarelas e verdes da tabela não foram considerados. 5. ANÁLISE DOS RESULTADOS A parte inferior da Tabela 5 apresenta a diferença absoluta de valores entre os métodos, em metros. É possível observar nesta tabela que as diferenças tendem a aumentar no sentido do Teste 1 para o Teste 6, e à medida que as projeções aumentam. Dos 30 casos analisados, em apenas 7 (23,3%) não foram constatadas diferenças que representassem a alteração da estaca inicial. Dezesseis testes (53,3%) apresentaram uma diferença equivalente a uma estaca (20 metros), 6 testes (20,0%) com diferença de 40 metros e 1 (3,3%) com diferença de 60 metros. A diferença absoluta entre os métodos, ao ser dividida pela distância de visibilidade mínima de ultrapassagem, identifica o quão subdimensionada está esta última, através do método gráfico. Para o valor 60 (Teste 6 e projeção 300 metros) é possível afirmar que, dos 140 metros necessários da distância de visibilidade mínima de parada, o método gráfico sonega os 60 metros inicias, reduzindo a distância necessária em 43%, o que caracteriza o subdimensionamento de um dos principais dispositivos de segurança viária de forma crítica. Da mesma forma, para os demais casos tem-se: 1 caso com redução de 6%, 4 casos com redução de 8%, 4 com 10%, 4 com 11%, 2 com 13%, 1 com 14%, 3 com 25% e 3 com 29%, além do caso extremo de 43% e dos 7 casos com acréscimo nulo (0%). 11 6. CONCLUSÕES E RECOMENDAÇÕES O presente artigo faz uma reconstrução histórica da análise de visibilidade vertical através do método gráfico. Ao avaliar o uso de gabarito sobre escala deformada, identifica um erro no método. Para dimensionar a repercussão deste erro, propõe um método de análise computacional/matemático. Nos estudos de caso, identifica e dimensiona o erro existente no método gráfico. Em síntese, as conclusões e recomendações resultantes deste trabalho são: 1. O método gráfico de análise da distância de visibilidade de ultrapassagem, em escala deformada, apresenta um erro conceitual (uso de gabarito, com possibilidade de diferentes inclinações, em escala deformada); 2. O erro subdimensiona a sinalização horizontal de proibição de ultrapassagem, sendo contra a segurança; 3. O erro, conforme rampa e projeção, pode chegar a subdimensionar em até 43% a distância de visibilidade de ultrapassagem; 4. A opção por uma escala não deformada não viabiliza o método gráfico, visto que a escala vertical reduz-se de forma a não permitir a identificação visual, com gabarito, de pontos com falta de visibilidade; 5. Considerar a distância de visibilidade em projeção horizontal é bastante razoável, visto que a diferença máxima desta para a distância de visibilidade (em visada, na escala natural) é de 0,33% (em favor da segurança); 6. Com a utilização do método computacional/matemático apresentado é possível analisar a visibilidade vertical com correção e desempenho. Agradecimentos Os autores agradecem a STE – Serviços Técnicos de Engenharia S.A. e CIENGE – Consultoria em Informática e Engenharia Ltda. por investirem em tecnologia nacional de vanguarda. REFERÊNCIAS BIBLIOGRÁFICAS AASHTO (2004) A Policy on Geometric Design of Highways and Streets "Green Book". American Association, Washington DC. BRASIL. Ministério da Saúde (2007) Portal da Saúde: Mortes no trânsito aumentam 9% em três anos. Disponível em: <http://portal.saude.gov.br/portal/aplicacoes/noticias/ noticias_detalhe.cfm?co_seq_noti cia=29276>. Acesso em: maio de 2007. CONTRAN (2007) Manual Brasileiro de Sinalização de Trânsito. Volume IV – Sinalização Horizontal. Ministério das Cidades, Brasília, DF. DENATRAN (1986) Manual de Sinalização de Trânsito: Parte II – Marcas Viárias e Parte III – Dispositivos Auxiliares à Sinalização. Ministério da Justiça, Brasília, DF. DNER (1973) Normas para Projeto das Estradas de Rodagem. Ministério dos Transportes, Rio de Janeiro. DNER (1999a) Manual de Projeto Geométrico de Rodovias Rurais. Ministério dos Transportes, Rio de Janeiro. DNER (1999b) Manual de Sinalização Rodoviária. Ministério dos Transportes, Rio de Janeiro. DNIT (2010a) Anuário Estatístico das Rodovias Federais 2010 – Acidentes de Trânsito e Ações de Enfrentamento ao Crime. Ministério dos Transportes, Brasília, DF. DNIT (2010b) Manual de Sinalização Rodoviária. Ministério dos Transportes, Rio de Janeiro. DNIT (2013) Relatório dos Levantamentos Funcionais das Rodovias Federais. Brasília, DF. IPEA (2006) Impactos Sociais e Econômicos dos Acidentes de Trânsito nas Rodovias Brasileiras – Relatório Executivo. Instituto de Pesquisa Econômica Aplicada. Brasília, DF. García, D. S. P.; Wandscheer, M. A.; Santos, F. F. F.; Fraga, P. G. R.; Teixeira, F. G., d'Azevedo, Z. S. e Di Rado, G. R. Diretrizes para o desenvolvimento de um sistema avançado para estudos e projetos viários: o conceito BIM no projeto de obras de infraestrutura. PANAM 2014, Santander. Anales., 2014. Fernando Fraga de Freitas dos Santos ([email protected]) Daniel Sergio Presta García ([email protected]) Marcelo André Wandscheer ([email protected]) Departamento de Design e Expressão Gráfica, Faculdade de Arquitetura, Universidade Federal do Rio Grande do Sul Av. Osvaldo Aranha, 99 - sala 408-6 – Porto Alegre, RS, Brasil 12
Download