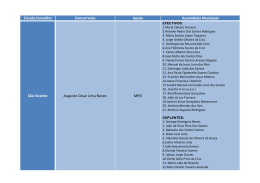
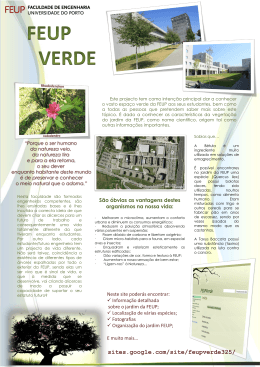
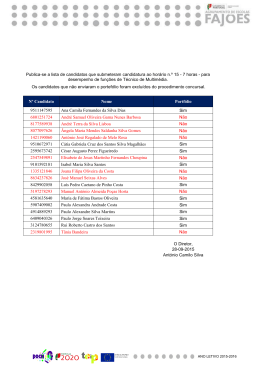
77. . ANÁLISE ANÁLISEVIBRATÓRIA VIBRATÓRIApelo peloMÉTODO MÉTODOde deRAYLEIGH RAYLEIGH A frequência de um sistema de 1 grau de liberdade caracteriza o seu comportamento dinâmico. Um dos processo mais simples para determinar w = k m é o método de Rayleigh. Pode ser aplicado a um sistema qualquer desde que se admita que a sua deformada é de determinado tipo - ψ (x) . O método de Rayleigh assenta no princípio da conservação da energia: “a energia num corpo em vibração livre mantém-se constante se não houver forças de amortecimento”. Seja então: u = u0 sen wt u& = u0 w cos wt A Energia Potencial (Energia de deformação da mola), vem wp = 1 2 1 2 k u = k u0 sen 2 wt 2 2 e a Energia Cinética da massa será wc = 1 1 m u& 2 = m u02 w 2 cos 2 w t 2 2 Os respectivos valores máximos ocorrem para π T = 4 2w T π t= = 2 2 t= ⇒ w pmax = ⇒ wp = 0 1 2 k u0 2 ⇒ wc = 0 ⇒ wcmax = 1 m u02 w 2 2 Portanto, se a energia total se mantém constante, obtém-se w pmax = wcmax FEUP - 2000 ⇒ w2 = k m ⇔ w= Raimundo Delgado & António Arêde k m 48 7.1 APLICAÇÃO A SISTEMAS CONTÍNUOS A vantagem deste método aparece mais evidente em sistemas com muitos graus de liberdade. Seja por exemplo o caso de uma viga em que se admite: u ( x, t ) = ψ( x ) u (t ) u (t ) = u0 sen wt com Isto quer dizer que: a forma da deformada da viga não varia com o tempo, só se alterando a sua amplitude e, no caso de ser uma vibração livre, varia harmónicamente. Esta hipótese reduz a viga a um sistema de 1 grau de liberdade (o deslocamento da extremidade) Neste caso, a máxima Energia de Deformação (potencial) é 2 2 ∂ 2ψ 1 L ∂ 2u 1 L W p = ∫ EI 2 dx = ∫ EI u0 sen w t 2 dx ∂x 2 0 2 0 ∂x 2 W pmax 1 2 L ∂ 2ψ = u0 ∫ EI 2 dx 0 2 ∂x e a máxima Energia Cinética da massa vem 2 Wc = 1 L ∂u 1 L 2 m dx = ∫ m ψ 2 (u0 w cos wt ) dx ∫ 0 0 2 2 ∂t Wcmax = 1 L m u02 w 2 ψ 2 dx ∫ 0 2 Portanto: w = 2 ∫ L 0 2 ∂ 2ψ EI 2 dx ← rigidez generalizada ∂x ∫ L 0 FEUP - 2000 m ψ 2 dx ← massa generalizada Raimundo Delgado & António Arêde 49 7.2 ESCOLHA DA FUNÇÃO DE FORMA DA DEFORMADA A aproximação do Método de Rayleigh depende da função de forma adoptada. ψ(x) Se ψ(x) não for a forma exacta da deformada em vibração livre, é necessário adicionar forças para manter esta vibração, o que significa maior rigidez do sistema e, consequentemente, maior frequência. A deformação que se obtém na vibração livre decorre da aplicação de forças de inércia que são proporcionais à distribuição de massa e à amplitude da deformada. ~ m(x). ψ e(x) ψe (x) Assim, a Deformada Exacta ψe(x) é a que resulta duma carga proporcional a m(x) ψe(x) m(x) ψ (x) Então, se se admitir ψ (x) e solicitar o sistema por m( x) ψ ( x) , ψ (x) a deformada ψ(x) que se obtém será uma boa aproximação. De um modo geral basta adoptar uma carga proporcional à massa p ( x ) = m( x ) g ⇒ ψ p (x ) que conduz à deformada ψp(x) devida às cargas permanentes. FEUP - 2000 Raimundo Delgado & António Arêde 50 7.3 MÉTODO DE RAYLEIGH APLICADO A UMA ESTRUTURA PORTICADA Planta Alçado 3.00 0.3x0.3 0.3x0.3 Piso 2 0.2x0.5 Lajes: 0.15m esp. 3.00 0.3x0.3 0.3x0.3 Piso 1 0.2x0.5 5.00 E = 2x107 kN/m2 Laje do piso 1 – 6,75kN/m2 (inclui peso próprio, revestimentos, divisórias e sobrecargas) Laje do piso 2 – 4.0 kN/m2 Peso do piso 1 Laje - 6.75×15.×5. __________________ 506.25 kN Vigas - 0.2×0.35×5.0×25×10 ____________ 87.5 kN Pilares - 0.3×0.3×3.0×25×8 ______________ 54.0 kN 647.75 kN Peso do piso 2 Laje - 4.0×15×5.0 _____________________ 300.0 kN Vigas - ________________________________ 87.5 kN Pilares - _______________________________ 54.0 kN 441.5 kN Massa: m1,Tot = 647.75 / 9.8 = 66.1 ton ; m2,Tot = 45.1 ton Massa/ Pórtico: m1 = m1,Tot / 4 = 16.5 ton; m2 = 11.3 ton FEUP - 2000 Raimundo Delgado & António Arêde 51 7.3.1 Método de Rayleigh Directo Admitindo uma deformada com deslocamentos unitários nos dois andares: 1.0 1.0 1 u = cos w t ~ 1 Máxima Energia Potencial W pmax = 1 ki ∆ui2 ∑ 2 em que ki, a rigidez dos pilares entre dois pisos, é ki = 12 EI ×2 = l3 12 × 0 .3 4 × 2 × 10 7 12 = 12000 kN/m 33 e os deslocamentos relativos entre pisos: ∆ u1 = 1.0 ; ∆ u2 = 0.0 W pmax = 6000 kJ Obtém-se assim Máxima Energia Cinética 1 u& = − w sen w t ~ 1 Wcmax = Fazendo 1 w2 2 & (16.5 ×1.0 + 11.3 ×1.0) = 13.9 w2 kJ m u = ∑ i i 2 2 W pmax = Wcmax 6000 = 13.9 w 2 w 2 = 431.65 ; w = 20.8 rad/s ; FEUP - 2000 f = 3.3 Hz Raimundo Delgado & António Arêde 52 7.3.2 Método de Rayleigh Melhorado Considera-se como deformada a que se obtém aplicando à estrutura as forças de inércia que se desenvolvem com a deformada assumida no ponto anterior e, que para o piso i, são dadas por f i = −mi u&&i = mi w2 cos wt ui0 Quando a aceleração é máxima, vem 16.5 2 f = w (kN) 11.3 Por sua vez os correspondentes deslocamentos podem ser obtidos por ki ∆ui = Ti em que ∆ui é o deslocamento relativo das extremidades dos pilares e Ti é o esforço transverso nos pilares. Assim: 12000 ∆u1 = (16.5 + 11.3) w 2 ; ∆u1 = 0.0023 w 2 ⇒ u1 = 0.0023 w 2 12000 ∆u 2 = 11.3 w 2 ; ∆u 2 = 0.0009 w 2 ⇒ u 2 = u1 + ∆u 2 = 0.0032 w 2 Máxima Energia Potencial W pmax = 1 1 f i ui = (16.5 × 0.0023 + 11.3 × 0.0032 ) w 4 = 0.037 w 4 ∑ 2 2 Máxima Energia Cinética 0.0023 w2 0.0023 = − w3 u& = − w sen w t sen w t 2 ~ 0.0032 0.0032 w Wcmax = ( ) 1 w6 2 & m u = 16.5 × 0.0023 2 + 11.3 × 0.0032 2 = 1.015 × 10 − 4 w6 ∑ i i 2 2 0.037 w 4 = 1.015 × 10 −4 w6 ⇒ w 2 = 364.5 ; w = 19.09 rad/s ; f = 3.04 Hz FEUP - 2000 Raimundo Delgado & António Arêde 53 7.3.3 Deformada Devida às Cargas Gravíticas Aplicadas Horizontalmente Sejam as seguintes forças gravíticas por pórtico para cada piso: F1 = m1 g = 647.75 / 4 = 161.9 kN F2 = m2 g = 441.5 / 4 = 110.4 kN Os correspondentes deslocamentos vêm d1 = 110.4 + 161.9 = 0.0227 m 12000 d 2 = 0.0227 + 110.4 = 0.0319 m 12000 Máxima Energia Potencial W p max = 1 ∑ Fi d i = 3.6 2 Máxima Energia Cinética Wcmax = 1 1 F mi u&i2max = ∑ i w2 d i2 ∑ 2 2 g = ( ) w2 161.9 × 0.0227 2 + 110.4 × 0.0319 2 = w2 × 0.01 2 × 9.8 De novo, igualando os dois valores máximos da energia, resulta: Fi ∑Fd = ∑ g w i i 2 d i2 ⇒ w= g ∑ Fi d i ∑F d i 2 i Expressão do RSA donde w = 18.98 rad/s ; f = 3.02 Hz FEUP - 2000 Raimundo Delgado & António Arêde 54 88. . RESPOSTA RESPOSTAààACÇÃO ACÇÃOSÍSMICA SÍSMICAde deUM UMSISTEMA SISTEMA COM COMUM UMGRAU GRAUDE DELIBERDADE LIBERDADE Conhecendo-se a lei de movimento do solo, pretende-se a resposta da estrutura. Neste caso a equação do movimento da estrutura vem eixo de referência m k/2 ug k/2 m u&&t + c u& + k u = 0 u g (t ) - deslocamento do solo u ut u (t ) - deslocamento relativo u t (t ) - deslocamento total O movimento sísmico origina uma resposta dinâmica porque as forças de inércia dependem do deslocamento total u t e as forças elásticas e de amortecimento dependem do movimento relativo. ut = u + ug m u&& + c u& + k u = −m u&&g u&& + 2 ξw u& + w 2 u = −u&&g A força sísmica é então Fef = −m u&&g Tudo se passa como se a massa m fosse solicitada por uma força proporcional à aceleração do solo, mantendo-se os apoios fixos. FEUP - 2000 Raimundo Delgado & António Arêde 55 u&&g (t ) - são os acelerogramas registados à superfície do solo Acelerograma 150 100 a (cm/s2) 50 0 0 2 4 6 8 10 12 14 16 -50 -100 -150 t (s) A expressão do movimento relativo pode ser obtida, por exemplo, através do integral de Duhamel u (t ) = 1 t m u&&g (τ ) e −ξ w (t − τ ) sen w (t − τ ) dτ ∫ 0 mw O valor máximo deste deslocamento pode ser tomado como uma medida da intensidade do sismo que originou o acelerograma u&&g (τ) Seja então S d (w, ξ) = umax (t ) Fazendo variar w e ξ, e traçando o resultado num diagrama (Sd , w), obtém-se Sd ξ = 0.02 ξ = 0.1 5 10 15 20 25 w ESPECTRO DE RESPOSTA DE DESLOCAMENTOS Resposta de todos os possíveis osciladores de 1 G.L., com um dado amortecimento, a uma dada acção. FEUP - 2000 Raimundo Delgado & António Arêde 56 Num sistema sem amortecimento, a aceleração absoluta é sempre proporcional ao deslocamento, o que se verifica também no instante dos valores máximos. t t m u&&t + k u = 0 ⇒ m u&&max + k u max = 0 ⇒ u&&max = − w 2u max Ou seja (8.1) S a (w ) = − w 2 S d (w ) O mesmo se pode obter no caso de sistemas com amortecimento, atendendo a que, quando o deslocamento relativo é máximo, a velocidade relativa é nula (ou próxima de zero), pelo que S a (w, ξ ) ≅ − w 2 S d (w, ξ ) A expressão (8.1), que por mera coincidência é idêntica à que se obtém numa resposta harmónica, sugere a definição duma velocidade fictícia associada com um movimento harmónico aparente. Trata-se da designada pseudo-velocidade, cujo valor máximo Sv é definido como velocidade espectral e dado por S v (w, ξ ) = w S d (w, ξ ) = S a (w, ξ ) w (8.2) onde, por conveniência e por serem irrelevantes, se omitiram os sinais. Outra forma habitual desta expressão é: S a (w, ξ ) = w S v (w, ξ ) = w 2 S d (w, ξ ) Considerando a envolvente de espectros devidos a vários acelerogramas que caracterizam a acção sísmica, obtêm-se os Espectros de Resposta Regulamentares. FEUP - 2000 Raimundo Delgado & António Arêde 57 Exemplo: Para o pórtico que tem vindo a ser apresentado, determinar o máximo deslocamento e o máximo corte basal. m = 10000 kg ; k = 5.2 ×106 N / m ; w = 22.8 rad / s ; f = 3.63 Hz Admitindo ξ = 5%, retira-se do espectro regulamentar S a = 420 cm / s 2 ; Sd = Sa 4 .2 = = 0.00807 m = 8.07 mm 2 w 22.82 donde a força elástica: f e = k S d = 5.2 ×106 × 8.07 × 10 −3 = 41964 N Ou, sabendo que num sistema em vibração livre se tem fi + fe = 0 ⇒ t f e = − f i = −m u&&max f e = m S a = 10000 × 4.2 = 42000 N ESPECTRO TRILOGARÍTMICO É possível num mesmo gráfico registar os valores espectrais da aceleração, velocidade e deslocamento. De facto, a relação (8.2) entre as três grandezas espectrais, permite escrever: log S v = log (w S d ) = log (2π f S d ) ⇒ log S v = log f + log (2π S d ) ⇒ S log S v = − log f + log a 2π S S log S v = log a = log a w 2π f Estas expressões representam uma infinidade de rectas a 45º e –45º num gráfico (log Sv , log f ), conforme se vão dando sucessivos valores a Sd e Sa. Se se construir uma escala para cada uma dessas duas classes de rectas, i.e., uma escala para a rectas lugar geométrico dos pares de valores que correspondem a um deslocamento espectral constante e outra escala para as rectas de aceleração espectral constante, obtém-se um gráfico tripartido geralmente designado por ESPECTRO TRILOGARÍTMICO. FEUP - 2000 Raimundo Delgado & António Arêde 58 Exemplo: Espectros Trilogarítmicos do sismo de El Centro (1940) – 0.32g, para vários coeficientes de amortecimento. Espectro de Resposta de Projecto: (espectro médio, normalizado para uma aceleração máxima do solo unitária 1.0g) FEUP - 2000 Raimundo Delgado & António Arêde 59 De igual forma também pode ser traçado em termos do período de vibração, apenas se invertendo a orientação das rectas a 45º. FEUP - 2000 Raimundo Delgado & António Arêde 60
Download