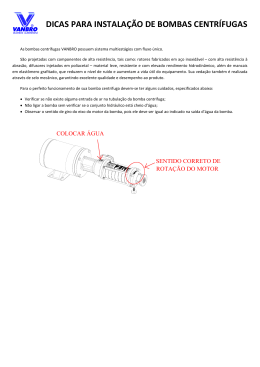
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 ELEVAÇÃO DE PETRÓLEO POR BCS VIA TÉCNICA DE CONTROLE FUZZY PID SUPERVISOR LEONARDO F. SOUZA, LUIZ H. S. TORRES, LEIZER SCHNITMAN, RINALDO A. M. VIEIRA Centro de Capacitação Tecnológica em Automação Industrial (CTAI), Programa de Pós-Graduação em Mecatrônica da Universidade Federal da Bahia, Rua Aristides Novis, nº02, Escola Politécnica, 2° andar, 40.210-630, Salvador, Bahia, Brasil E-mails: [email protected], [email protected], [email protected], [email protected] Abstract: The Electrical Submersible Pump (ESP) is one of the methods used for artificial lift of oil. Thus, this paper proposes the use of Fuzzy PID Supervisor control technique to control the level of dynamic fluid in the oil well, even in the presence of uncertainty and dynamics not modeled. This nonlinear controller is able to adjust the tuning parameters PID control automatically through intelligent control based on Fuzzy Supervisor rules. The Laboratório de Elevação Artificial (LEA), at the Escola Politécnica da Universidade Federal da Bahia, has a ESP plant with a 32m instrumented oil well, in a laboratory environment that favor the development of studies and research in the control area. The aim of this study is to control the level of viscous fluid (oil) in the oil well. The results obtained with the method of fuzzy PID Supervisor control in the simulated environment shows that there is stability in the control signal and response of the controlled plant. In sequence this work, the proposed controller will be implemented on the physical system electrical submersible centrifugal pumping from the LEA to practice validation tests. Keywords: Fuzzy PID Control, Hybrid Control, Intelligent Control, ESP, Artificial Lift Oil. Resumo: O Bombeio Centrifugo Submerso (BCS) é um dos métodos aplicados para a elevação artificial de petróleo. O presente artigo propõe o uso de técnica de controle Supervisor Fuzzy PID para controlar o nível dinâmico de fluido, submergência, no anular do poço, mesmo na presença de incertezas e dinâmicas não modeladas. Este controlador não linear é capaz de ajustar os parâmetros de sintonia do controle PID automaticamente por meio do controle inteligente Fuzzy Supervisor baseado em regras. O Laboratório de Elevação Artificial (LEA), da Escola Politécnica da Universidade Federal da Bahia, dispõe de uma planta BCS com um poço de 32m de altura completamente instrumentado, num ambiente experimental que favorece o desenvolvimento de estudos e pesquisas, entre outros, na área de controle. O objetivo deste estudo é controlar o nível de fluido viscoso (óleo) no anular do poço. Os resultados obtidos com o método de controle Fuzzy PID em ambiente simulado mostram que há estabilidade no sinal de controle e resposta da planta. Na seqüência deste trabalho o controlador proposto será implementado no sistema físico de bombeio centrifugo submerso do LEA para testes de validação prática. Palavras-chave: Controle Fuzzy PID, Controle Híbrido, Controle Inteligente, BCS, Elevação Artificial de Petróleo. 1 trajetória de desempenho de uma bomba BCS e sua faixa de operação recomendada pelo fabricante que em seus catálogos considera o fluido como sendo a água. Portanto, é proposta deste artigo à utilização do método de controle Fuzzy PID Supervisor (Lemke, 1985), para controlar a submergência da bomba no anular do poço, mesmo na presença de incertezas e dinâmicas não modeladas associadas a este processo de bombeio. Como etapa necessária ao objetivo deste trabalho, é também utilizado o método de correção de viscosidade do fluido (Turzo et al., 2000 apud Estevam, 2008; Takács, 2009). Este artigo possui a seguinte estrutura: a seção 2 apresenta um sistema BCS típico e cálculos de correção de viscosidade, conforme o Hydraulic Institute USA. Na seção 3 é descrita a metodologia sobre o comportamento dinâmico do processo e técnica de controle Fuzzy PID Supervisor. A seção 4 apresenta os resultados em ambiente simulado. E por fim, a seção 5 traz as conclusões. Introdução A utilização do método de elevação artificial de petróleo denominado de Bombeio Centrífugo Submerso (BCS), tem crescido nos últimos anos por este ser capaz de elevar altas vazões de fluidos a grandes profundidades sob diferentes condições dinâmicas. Segundo Ribeiro et al. (2005), a Petrobrás S.A. é pioneira no uso de BCS em águas profundas, por meio de um teste do protótipo bem sucedido em um poço submarino, em 1994. O BCS é um método de elevação que pode ser aplicado a poços no leito marítimo (off-shore) e poços terrestres (on-shore) em que o fluido é elevado devido ao incremento de pressão de fundo. O bombeio centrifugo submerso submarino tem sido aplicado a campos formados por petróleo mais viscoso e pesado, e por causa disso há a necessidade de uma tecnologia que seja instalada no interior do poço para auxiliar no bombeamento (elevação) do óleo até a plataforma (Neto, 2006). Um ponto importante neste método de elevação é o conhecimento das curvas características da bomba para o correto dimensionamento e controle do processo de produção de petróleo. As curvas características representam a 2 Sistema BCS Existem diversos métodos de elevação artificial de petróleo cujo objetivo em comum é fornecer energia 4203 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 mais utilizado com mais de 100.000 instalações no mundo. Dentre os parâmetros utilizados para seleção de um determinado método de elevação artificial, podese citar as seguintes características inerentes ao poço que geralmente são analisadas: o teor de areia produzido, a razão gás-óleo, a viscosidade dos fluidos produzidos, profundidade do reservatório, deposição de parafina, temperatura e formação de emulsão, que na proposta atual podem ser considerados como parte das perturbações ou dinâmicas não modeladas. Atualmente, poços com elevada razão gás-óleo, com fluidos de alta viscosidade e baixa temperatura podem produzir de forma econômica por este método de bombeio. A Fig.(2) representa o gradiente de pressão da planta BCS instalada no Laboratório de Elevação Artificial (LEA). O reservatório do LEA possui capacidade volumétrica e pressão suficiente para manter a submergência da bomba, conforme observado em seu diagrama de perfil de pressão. A planta BCS-LEA possui uma estrutura em que óleo produzido (bombeado pelo sistema BCS) retorna ao poço por meio de outra coluna comunicante ao reservatório. ao fluido para sua elevação até a superfície. A escolha de um determinado método depende de vários critérios técnicos inerentes ao reservatório e poço de produção. No caso específico do BCS, pode-se citar a limitação que o processo tem em relação à elevação de fluidos com grandes volumes de gás (traduzidas pelo RGO – razão gás-óleo), uma vez que a presença de bolhas de gás no fluido faz com que se perca eficiência no bombeamento. Em presenças de grandes volumes de gás pode-se chegar ao ponto de bloqueio da bomba e conseqüente parada da produção. A condição básica do método é que a bomba BCS esteja totalmente imersa no óleo para seu funcionamento. 2.1 Estrutura típica de um BCS O método de elevação artificial de petróleo por BCS consiste na alimentação de um motor elétrico trifásico de dois pólos imerso no óleo. O seu eixo é acoplado a uma bomba centrifuga de múltiplos estágios, por meio de um selo protetor, conforme Fig.(1). O motor converte a energia elétrica em energia mecânica rotacional que aciona a bomba. Assim, parte da energia é transmitida ao fluido sob forma incremental de pressão fazendo com que o óleo no fundo do poço chegue à plataforma na superfície. 0 20 40 Profundidade, H(m) 60 80 Gradiente dinâmico Gradiente estático 100 120 140 Pressão de admissão atrito Bomba 180 200 P P 160 Pressão de fundo 0 500 Pressão de descarga 1000 1500 2000 Pressão, P(KPa) Figura 2: Perfil de Pressão da Planta BCS-LEA. Assim, este artigo considera apenas o escoamento de óleo no sistema BCS, denominado escoamento monofásico. Este escoamento é caracterizado por um alto fluxo de líquido incompressível e se houver gás, é uma pequena e desprezível fração na admissão da bomba, de forma que não afete o desempenho do processo (Verde, 2011). A planta BCS instalada no LEA possui um poço artificial de 32m de altura, totalmente instrumentado com sistema de supervisão, controle, coleta e registro dos dados. A referida planta possui uma válvula no topo do processo de elevação, a qual pode limitar a passagem do fluido produzido pela elevação. Devido a isso, quando a válvula é parcialmente fechada, a pressão de descar- Figura 1: Conjunto de fundo do sistema BCS (adaptado de Baker Rughes, 2009). Segundo Rossi (2008), até poucos anos atrás o BCS era considerado um método de elevação artificial para poços que produziam altas vazões de fluido, sob a influência de influxo de água (mecanismo de recuperação do reservatório de produção que utiliza o aqüífero como meio de manter a pressão original do mesmo). Conforme Barrios (2011), o BCS é usado em poços de média e alta vazão volumétrica, e é o segundo método de elevação artificial de petróleo 4204 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 ga (saída da bomba) aumenta a ponto de possibilitar a realização de experimentos mais próximos da realidade, representando poços com profundidades maiores. elevação Hbep da curva característica da bomba, fornecida nos catálogos. Já a Eq.(7) utiliza o parâmetro calculado, y, e a viscosidade cinemática do fluido, . 2.2 Método de correção de viscosidade y 112,1374 6,6504* ln(H bep ) 12,8429* ln(Qbep ) 39,5276 26,5605 * ln( ) y Q * exp 51,6565 O desempenho da bomba pode ser analisado por meio de curvas características que relacionam as grandezas: altura de elevação (Head), potência e rendimento versus vazão. Entretanto, as curvas fornecidas pelos fabricantes por meio de catálogos consideram o fluido como sendo a água, e incluem os resultados dos ensaios realizados em seus programas computacionais de seleção e dimensionamento de sistemas de bombeamento. Normalmente tem base empírica e não fornecem maiores detalhes sobre sua obtenção. Portanto, é necessário realizar uma correção de viscosidade nas curvas de desempenho de um BCS quando este opera com fluido diferente do referencial. Um método clássico para correção de viscosidade é proposto pelo Hydraulic Institute – USA, que utiliza dois diagramas, disponíveis na literatura, para se determinar os fatores de correção de vazão volumétrica, Cq, altura de elevação, Ch, e eficiência, Cη. Os fatores de correção da curva característica são utilizados na análise de desempenho da bomba, quando operando com fluido viscoso (Amaral, 2007; Takács, 2009). As Eq.(3), Eq.(4) e Eq.(5) apresentam a relação entre a vazão, Qóleo , altura de elevação, H óleo , e eficiência, óleo , do fluido viscoso. Com os fatores de correção: Cq, Ch e Cη. Os termos: Qágua , H água e água correspondem (3) H óleo C h H água (4) óleo C água (5) (7) O fator de correção da vazão volumétrica é determinado pela Eq.(8). E o fator de correção da eficiência da bomba centrifuga é calculado pela Eq.(9). Ambos os fatores são constantes para determinação de qualquer outro ponto de correção, quer seja vazão ou eficiência. CQ 1,0 4,0327 * 10 3 Q* 1,724 * 10 4 (Q* ) 2 (8) C 1,0 3,3075 * 10 2 Q* 2,8875 * 10 4 (Q* ) 2 (9) A altura de elevação do líquido viscoso se baseia na determinação de quatro pontos distintos, que definem a trajetória da curva corrigida de elevação do fluido. Os quatro pontos correspondem aos seguintes percentuais considerando o fluido sendo óleo: Eq.(10) 60% do BEP, CH0,6, Eq.(11) 80% do BEP, CH0,8, Eq.(12) 100% do BEP, CH1,0, e Eq.(13) 120% do BEP, CH1,2. a vazão, altura de elevação e rendimento considerando o referencial água, respectivamente. Qóleo Cq Qágua (6) C H 0,6 1,0 3,68 * 10 3 Q* 4,36 * 10 5 (Q* ) 2 (10) CH 0,8 1,0 4,4723*103 Q* 4,18 *105 (Q* ) 2 (11) C H1,0 1,0 7,00763*103 Q* 1,41*105 (Q* ) 2 (12) C H 1,2 1,0 9,01 * 10 3 Q* 1,31 * 10 5 (Q* ) 2 (13) Os cálculos decorrentes das Eq.(3) a Eq.(13) possibilitam desenvolver a Tabela (1), com o uso de dados contidos no catálogo de bomba Centrilift Série 400, dezoito estágios, freqüência de 60 hz e propriedade do fluido: Lubrax Hydra XP 10. A correção de viscosidade elaborada pelo Hidraulic Institute – USA, envolve leitura visual por meio de diagramas, que podem gerar uma análise demorada e imprecisa na determinação dos fatores de correção de viscosidade. Neste sentido, Turzo et al., (2000) apud (Estevam, 2008; Takács, 2009), a fim de melhorar a análise das referidas correções, desenvolveram algumas funções numéricas para determinação dos fatores de viscosidade com base nos já mencionados gráficos do hidraulic Institute USA. As equações desenvolvidas por Turzo são aplicadas neste artigo. As Eq.(6) e Eq.(7) representam os parâmetros de estimação: y e Q*. Estes parâmetros são utilizados na correção de viscosidade. A Eq.(6) utiliza a vazão volumétrica, Qbep, e altura de Tabela 1. Correção de viscosidade do fluido. 0,6Qbep 0,8Qbep 1,0Qbep 1,2Qbep Vazão (m3/d) Head (m) BHPvisc (HP) Eficiência (%) 39.02 52.03 67.76 78.04 158.1 145.6 126.1 98.77 3.6177 3.9083 4.0423 4.0138 21.60 24.46 25.26 23.63 A potência elétrica denominada BHP (Brake HorsePower) no caso do óleo, BHPóleo, e no caso da água, BHPágua, podem ser determinada por meio da Eq.(14), onde é densidade relativa do fluido. 4205 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 BHP 1,519 *10 4 QxHx (14) 180 BEP 160 H água óleo H 140 água H e ad (m ) 120 Figura 4. Sistema de comunicação OPC da planta BCS-LEA. água 100 80 BEP óleo 60 3.2 Submergência da bomba BCS BHP óleo 40 A capacidade volumétrica de bombeamento e pressão de fluido são específicos para cada ponto de rotação da bomba. Assim, a Figura (5) ilustra o fluxo de óleo proveniente dos reservatórios para o anular, Qf, a vazão de saída do anular realizado por uma bomba BCS como sendo, Qb. De acordo com Costa (2012), defini-se nível dinâmico para poços que não possuem obturador, como sendo a distância entre a superfície e o nível de líquido no espaço anular com a bomba em operação. A submergência é definida como a distância entre o nível de líquido e a sucção da bomba, aqui denominada como hsub. BHP 20 0 óleo água 0 20 40 60 80 100 120 Vazão, Q (m 3/d) b Figura 3. Correção de viscosidade da curva característica a 60Hz (1cSt para 10cSt). A Fig.(3), mostra as curvas de correção de viscosidade pelo método numérico proposto por Turzo. Os pontos: 0,6Qbep, 0,8Qbep, 1,0Qbep e 1,2Qbep são mostrados no sentido crescente do eixo vazão volumétrica, respectivamente. Devido à diferença de viscosidade entre os fluidos verifica-se uma diferença nos pontos que representam o desempenho possível da bomba quando operando com água e também quando bombeando óleo. Observa-se uma redução nas curvas corrigidas de viscosidade referentes à eficiência e elevação, e um conseqüente aumento de potência elétrica consumida pela planta BCS. 3 Metodologia 3.1 Arquitetura de Automação e Controle do LEA Dentre os principais equipamentos de automação industrial instalado no LEA, pode-se citar o Controlador Lógico Programável (CLP) e variador de freqüência. Além de alguns dispositivos de campo integrados a ferramentas computacionais avançadas, tipo software SCADA (Supervisory Control And Data Acquisition), comunicação OPC (OLE for Process Control) e MATLAB/SIMULINK. Tal cenário possibilita a análise e aplicação de algoritmos de controle, entre eles, da proposta Fuzzy PID Supervisor. Desse modo, testes de validações e simulações de produção em condições próximas às reais propicia a obtenção de resultados efetivos sem afetar a produção de poços reais. A Figura (4) mostra o resumo da arquitetura de automação e controle do sistema BCS-LEA. Figura 5. Poço com sistema BCS (Costa, 2012). Para determinar o balanço volumétrico de líquido no anular do poço foi utilizada a equação diferencial ordinária, como mostra a Equação (15). Aanu dhsub Q f Qb dt (15) No caso, Aanu é a área da seção transversal do anular. Aanu é calculado da seguinte forma: 2 dianu deb2 dhsub . E é a taxa de varia4 dt ção da submergência. Já para o fluxo de óleo desenvolvido pela bomba centrifuga após correção de vis- Aanu 4206 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 proporcional ΔKp, derivativo ΔKd, e integrativo ΔKi , que são as variáveis de saída do supervisor Fuzzy. Também é demonstrado o sinal de controle u. cosidade, utilizou-se o método dos mínimos quadrados para inferir a relação entre a freqüência de acionamento da bomba pelo inversor e sua respectiva vazão de saída. Assim, a curva polinomial de terceira ordem mostrada na Eq.(16) representa a produção do sistema BCS dimensionado para operar na vazão máxima. Qb =-1,87*10-4f 3+2,31*10-2f 2+5,852*10-1f+9.1945 (16) Sendo assim, f é a freqüência de alimentação da bomba em Hertz e a vazão da bomba usualmente é medida em metros cúbicos por dia. Figura 7. Estrutura do controle Fuzzy PID Supervisor. Contudo, para o desenvolvimento da base de conhecimento do processo foram atribuídos termos lingüísticos sobre os estados das variáveis de entrada-saída. Sendo associado a cada termo lingüístico um conjunto Fuzzy por uma função de pertinência. As informações sobre os estados das variáveis foram descritas por uma base de regras definidas como a seguir. A Tabela 2 apresenta os conjuntos nebulosos relacionados à base de regras de sintonia das variáveis: proporcional Pf, derivativa Df, integrativa If. 3.2 Controle Fuzzy PID Supervisor Neste artigo é utilizada a técnica de controle Fuzzy PID Supervisor adaptado do modelo de Lemke e DeZhao (1985) e Melo (2008). Sendo que este método consiste na supervisão de um modelo de controle PID por um controlador inteligente Fuzzy. Este controle propicia um aumento de desempenho devido o controlador não-linear ser capaz de controlar um sistema, também não-linear. Conceitualmente, o controlador Fuzzy atua na supervisão e sintonia automática dos parâmetros PID para controle de processos. Os ajustes dos ganhos PID ocorrem de forma dinâmica, de acordo com o status do processo monitorado. Assim, é utilizado o método de Mamdani na etapa de inferência devido à simplicidade e eficiência. Além de ser bastante condizente com a intuição humana em caracterizar o conhecimento sobre um determinado processo por meio de regras lingüísticas condicionais. Esta versatilidade da utilização da teoria Fuzzy torna possível converter a experiência humana, fornecida por especialistas, em uma forma de manipulação matemática utilizável nos computadores, ao caracterizar o processo estudado. O diagrama de bloco na Fig.(6) representa o controlador proposto com o sistema BCS. Tabela 2. Conjuntos nebulosos com base de regras. Significado Sigla Pf Df, If Muito negativo Negativo médio Pouco negativo Zero Pouco positivo Positivo Médio Muito Positivo N-NN Z P P+ P++ 1,0 2,0 3,0 4,0 5,0 6,0 7,0 1,0 2,0 3,0 4,0 5,0 Tabela 3. Base de regras da saída Pf . Pf Derivada da submergência, N-N Z P P++ Erro N-1,0 1,0 4,0 4,0 4,0 N1,0 1,0 4,0 5,0 4,0 Z 1,0 1,0 4,0 6,2 4,0 hsub P 1,0 1,0 4,0 5,0 4,0 P++ 1,0 1,0 4,0 4,0 4,0 Tabela 4. Base de regras da saída If . If Erro Figura 6. Diagrama de bloco Fuzzy-PID do sistema BCS. A estrutura do controle Fuzzy PID Supervisor é mostrada na Figura 7. Na qual se observa o sinal de referência, r, o erro, e, a integral do erro ie, e o ponto de operação hsub, que são as variáveis de entradas do Supervisor Fuzzy. Também é possível observar a adaptação dos ganhos a partir do supervisor Fuzzy: Integral do erro, ie N-N Z P P++ N-1,0 1,0 1,0 1,0 1,0 N1,0 1,0 1,0 1,0 1,0 Z 1,0 1,0 5,0 4,0 3,0 P 1,0 1,0 4,0 3,0 3,0 P++ 1,0 1,0 3,0 3,0 3,0 A Tabela (3) mostra a base de regras da saída Pf, enquanto que a Tabela (4) mostra as regras da saída If. 4207 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Figura 8. Conjunto nebuloso de entrada e saída do controlador FPID. Por fim, os conjuntos nebulosos apresentados na Figura (8) correspondem às entradas: erro relativo x, integral relativa do erro ix e taxa relativa da submergência cx. Além dos conjuntos nebulosos de saída Kp, Ki e Kd, com os respectivos graus de pertinência. As entradas assumem valores relativos no intervalo [-1,1] e a saída Kp e Ki de -100% a +100% do valor original da constante, sendo que no caso da saída Kd assumi valor entre -50% a +50%. Sinal de Controle (Hz) 55 50 45 40 4 Resultados 35 O controle Fuzzy PID Supervisor proposto neste artigo para controlar a submergência da bomba no anular foi simulado com base na Fig.(6) no Matlab Simulink. Alguns parâmetros adquiridos na planta experimental de bombeio em malha aberta foram utilizados aqui, conforme Fig.(4). Por exemplo, o nível estático de submergência no anular hsub= 31,44m, área do anular Aanu = 0,016m2, e peso especifico γ =8388Nm-3 do óleo. Assim, a Fig.(9) apresenta o comportamento da submergência, hsub, devido ação de controle que aciona o motor. Enquanto, a Fig.(10) mostra o sinal de controle Fuzzy PID Supervisor, u, que controla a planta BCS. 30 Anular (m) 25 200 400 600 800 1000 Tempo (s) Figura 10. Sinal de controle Fuzzy PID Supervisor que controla a bomba. 1.8 Kp Kd Ki 1.6 Ganho PID 1.4 1.2 1 0.8 hsub (m) 0.6 Referência 0.4 0.2 20 0 200 400 600 800 1000 Tempo (s) 15 Ponto de admissão Figura 11. Ajuste automático dos ganhos Kp, Kd, Ki pelo supervisor Fuzzy. Submergência 10 5 0 0 200 400 600 800 1000 Tempo (s) Figura 9. Submergência da bomba devido ação de controle. 4208 A Fig.(11) apresenta os ganhos de sintonia Kp, Kd e Ki ajustados pelo controle Fuzzy PID Supervisor automaticamente para manter a estabilidade do processo. Observar-se que a variável controlada, hsub, rastreia com estabilidade o sinal de referência Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Melo, A. V., 2008. Desenvolvimento de Controladores Inteligentes para o Sistema VASPS. Universidade Estadual de Campinas. 134 p. Neto, J. B. O. 2006. O Processo de Aprendizado Tecnológico na Trajetória do Sistema de Produção Flutuante Empreendido Pela Petrobrás em seu Programa de Capacitação Tecnológica em Águas Profundas – Procap. Universidade Federal do Paraná. 204 p. Ribeiro, M.P., Oliveira, P.S., Matos, J.S., Silva, J.E.M. May 2005. Field Applications of Subsea Electrical Submersible Pump in Brasil. Offshore Technology Conference, OTC 17415, Houston, Texas. Rossi, N. C. M., 2008. Bombeio Centrifugo Submerso. Apostila Petrobrás. 70p. Takács, G., 2009. Electrical submersible pumps manual. Gulf Professional Publishing, USA. Turzo, Z., Takács, G. and Zsuga, J., 2000. A Computerized Model for Viscosity Correction of Centrifugal Pump Performance Curves. 47th Southwestern Petroleum Short Course, Texas. Verde, W. M. 2011, Estudo Experimental de Bombas de BCS Operando com Escoamento Bifásico Gás-Líquido. Universidade Estadual de Campinas. 129p. desejado para o processo. Assim, a vazão Qb pode aumentar ou diminuir de acordo com o sinal de controle que atua no inversor de freqüência e consequentemente na rotação do motor da bomba compensando eventuais mudanças no ponto de operação. 5 Conclusão A técnica de controle Fuzzy PID Supervisor para sintonizar automaticamente os ganhos Kp, Kd e Ki foi satisfatória. Os resultados em ambiente simulado mostraram um desempenho estável com sobre-amortecimento da resposta, submergência, mesmo na presença de variáveis não modeladas e incertezas. Quando a planta BCS opera no ponto desejado sugere que os dispositivos internos da bomba, por exemplo, o impelidor e o difusor não terão desgaste prematuro. Intervenções em sistemas BCS usualmente associam um alto custo, por isso, operar no ponto especificado significa aumentar receitas e reduzir custos operacionais de manutenção. Na seqüência deste trabalho o controlador proposto será implementado no sistema físico de bombeio centrifugo submerso do Laboratório de Elevação Artificial. Agradecimentos Os autores agradecem ao CTAI da Escola Politécnica da UFBA pela infraestrutura disponibilizada, a CAPES pelo apoio financeiro e a Petrobrás pelo apoio ao desenvolvimento do LEA. Referências Bibliográficas Amaral, G. D. L. 2007. Modelagem do Escoamento Monofásico em Bomba Centrífuga Submersa Operando com Fluidos Viscosos. Universidade Estadual de Campinas. 234p. Baker Rughes, 2009. Centrilift Submersible Pump Handbook Ninth Edition, Version 1. Barrios, L., Prado, M. G., 2011. Modeling TwoPhase Flow Inside an Electrical Submersible Pump Stage. Contributed by the Petroleum Division of ASME for publication in the Journal of Energy Resources Technology. Vol.133. 10p. Costa, R. O., 2012, Controle Aplicado a Poços com Método de Elevação Bombeio Centrifugo Submerso. Natal: Universidade Federal do Rio Grande do Norte. 160 p. Tese (Doutorado). Estevam, V. 2008. Curso Avançado de BCS. Apostila Petrobrás. 332p. Lemke, V. N., H. R., De-Zhao, W., 1985. Fuzzy PID supervisor. Proceedings of the 24th IEEE Conference on Decision and Control, Fort Lauderdale, Florida, USA. 602 – 608p. 4209
Download