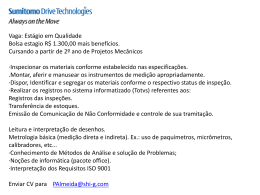
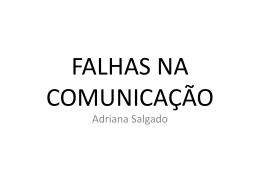
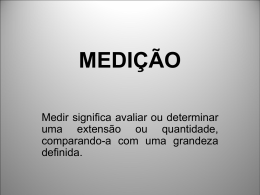
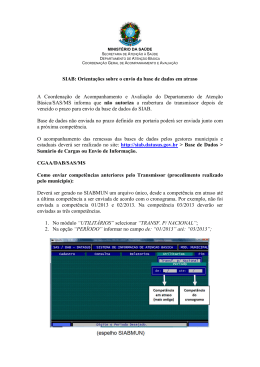
Instrução Principal08.2011 MI EML0710 G-(en) 244LDLevelStar Transmissor Inteligente de Empuxo para Nível de Líquido, Interface e Densidade com deslocador e Tubulação de Torque – Versão HART – O transmissor inteligente 244LDLevelStar é projetado para realizar medições contínuas de nível de líquido, interface ou densidade de líquidos no processo de todas as aplicações industriais. A medição é baseada no princípio de empuxo de Arquimedes comprovado e, portanto, é extremamente robusto e durável. Os valores de medição podem ser transferidos de modo analógico e digital. A comunicação digital facilita a operação e a configuração completas por meio de PC ou sistema de controle. Apesar de temperaturas extremas, alta pressão de processo e líquidos corrosivos, o 244LD mede com confiabilidade consistente e alta precisão. É aprovado para instalações em contato com atmosferas explosivas. O 244LVP combina a ampla experiência da FOXBORO ECKARDT com a tecnologia digital mais avançada. RECURSOS •Comunicação HART, 4 a 20 mA •Configuração via FDT-DTM •LCD gráfico de texto integral multilíngue •Comunicação IR como um padrão •Fácil adaptação ao ponto de medição sem calibração na oficina •Característica linear ou personalizada •Linearização de 32 pontos para medição volumétrica Reparo e manutenção devem ser realizados por pessoal qualificado! •Retrodocumentação do ponto de medição •Mensagens contínuas de autodiagnóstico, status e diagnóstico •Valor de segurança configurável •Exibição local em %, mA ou unidades físicas •Temperatura de processo de –196 °C a +500 °C •Materiais para uso com meios agressivos •Tecnologia de sensor Micro Sintermetal 2 244LD MI EML0710 G-(en) ÍNDICE CÁP.ÍNDICE PÁGINA CÁP.ÍNDICE PÁGINA 1 PROJETO 3 6 COMISSIONAMENTO 9 2 MÉTODO DE OPERAÇÃO 3 7 DESCOMISSIONAMENTO 9 3 IDENTIFICAÇÃO Placa de identificação 4 8 CONFIGURAÇÃO DO TRANSMISSOR Iniciando a operação Configurando via teclas locais e LCD 9 10 10 4 4.1 4.2 4.3 4.4 4.5 MONTAGEM Altas temperaturas do meio Montagem sobre o tanque Montagem na lateral do tanque Montando o corpo tipo "wafer" Deslocador 204DE 5 5 5 5 6 7 9 DIMENSIONAMENTO DO DESLOCADOR 16 5 5 CONEXÃO ELÉTRICA 5.1 Conexão do fio de sinal 5.2 Terra 8 8 8 10 PRINCÍPIO DE MEDIÇÃO 18 10.1 Diagrama de blocos com comunicação HART 19 10.2 Explicações para diagramas de bloco 19 11 ALIMENTAÇÃO DO TRANSMISSOR Versão com jaqueta de aquecimento 22 MI EML0710 G-(en) 244LD 3 1 PROJETO 20 22 121 128 131 133 134 135 150 LH Amplificador Klemmenraum Sensor Dissipador de calor Corpo tipo "wafer" com tubulação de torque Alavanca de transmissão Tubulação de torque Alavanca da braçadeira Deslocador com cadeia de suspensão Versão da montagem esquerda Para montagem no lado esquerdo, todas as peças internas são organizadas da maneira inversa. 2 MÉTODO DE OPERAÇÃO A força de empuxo do deslocador 150 é transferida via alavanca de transmissão 133 e tubulação de torque 134 para operar a haste do sensor, onde atua na extremidade livre do elemento do sensor 121. Quatro elementos do medidor de tensão de metal de película fina são inseridos no elemento do sensor, o que altera a resistência na proporção da tensão de pressão ou tração. Esses quatro elementos de medidor de tensão de metal de película fina são conectadas como uma ponte completa Wheatstone fornecida a partir do amplificador. A tensão na seção da ponte diagonal proporcional ao peso efetivo é alimentada ao amplificador eletrônico como um sinal de entrada. Essa tensão é convertida via amplificador eletrônico no sinal de saída de dois fios digital ou de 4 a 20 mA. O amplificador é alimentado pelo circuito de corrente de sinal no modo de dois fios. 4 244LD MI EML0710 G-(en) 3 IDENTIFICAÇÃO Rótulo da caldeira 3 O transmissor é identificado com vários rótulos. Rótulo da caldeira com pressão nominal, material, carga de pressão de temperatura permitida, nº de série etc. Com a opção Wasserstand 100, o rótulo de número de certificação é montado acima do rótulo da caldeira. Rótulo de dados de ajuste Placa de identificação do transmissor 1 A placa de identificação do transmissor mostra o Código de Modelo, o número de série e os dados de certificação do transmissor. (Exemplo) Combinando o deslocador: Tome cuidado com a combinação correta do transmissor e do deslocador ao montar. Cada transmissor é calibrado para o respectivo deslocador de acordo com os dados do pedido na fábrica. Cada par de transmissor/deslocador possui rótulos de dados idênticos para evitar combinação incorreta. Rótulo do material da tubulação de torque TORSIONSROHR - TUBULAÇÃO DE TORQUE ECEP: Nº do ID para a versão especial com a Opção de proteção contra Transbordamento conforme WHG Rótulo de nº da plaqueta 2 (Exemplo) Diretamente fixado ou anexado TAMPA 09/16 Rótulo opcional com dispositivos de acordo com o padrão NACE. Com o rótulo de número de plaqueta afixado, na parte de trás do mesmo. 1,4404 / 1,4435 / 2,4610 / 2,4816 Refere-se ao material da tubulação de torque e é afixado à borda do flange. Rótulo da rosca Na versão com roscas NPOT, perto do prensa-cabo está um rótulo que descreve o tipo de rosca. MI EML0710 G-(en) 244LD 4 MONTAGEM O 244LDLevelStaris é diretamente integrado ao tanque ou, como alternativa, a uma câmara de deslocador de montagem lateral (p. ex., 204DC). Durante a instalação, a faixa permitida de pressão estática e temperatura ambiente deve ser observada. (Veja o Capítulo 3, Rótulo da caldeira). 5 Se o tanque contiver um líquido turbulento, uma gaiola de proteção/tubulação deve ser utilizada. Possui um furo de ventilação 146 acima do nível máximo do líquido. Entre a gaiola de proteção/tubulação 142 e o deslocador 150, deve haver uma folga de 5... 10 mm. 4.3 Montagem na lateral do tanque 4.1 Temperaturas médias elevadas É importante garantir que a temperatura máxima permitida do invólucro de eletrônicos seja de 85 °C e que a do invólucro do sensor de 120 °C não seja excedida. Para equipamento e dispositivos à prova de explosão aprovados para proteção contra transbordamento de acordo com WHG, as informações nas especificações do produto PSS EML0710 e nos certificados ou aprovações devem ser observadas. 4.2 Montagem sobre o tanque 147 Câmara do deslocador 204 CC 148 Dispositivo de fechamento Quando usado na Zona 0, é preciso utilizar acessórios resistentes à entrada de chamas. Se a câmara ainda não tiver sido montada pelo cliente, ela deve ser montada no tanque com parafusos e vedações adequados (não incluídos no escopo da entrega). Certifique-se de que a câmara do deslocador seja exatamente vertical. Entre a gaiola de proteção ou tubulação e o deslocador, deve haver uma folga de 5... 10 mm. 20 120 131 140 141 Amplificador Invólucro do sensor Corpo tipo "wafer" Flange de conexão Flange cego 142 Gaiola/tubo de proteção 146 Furo de ventilação 150 Deslocador 204DE 6 244LD 4.4 Montando o corpo tipo "wafer" MI EML0710 G-(en) Aperte as porcas em todos os parafusos com a chave adequada. Prossiga na transversal para evitar obstrução. Torque de aperto recomendado (Pré-tensionado a 70% do ponto de resistência mínimo a 20 °C) Mat. M12 M16 M20 M24 M27 M30 M36 A2-70 40 Nm 95 Nm 185 Nm 310 Nm 450 Nm 630 Nm 1.080 Nm 1,7225 1,7709 (8,8) 50 Nm 120 Nm 250 Nm 435 Nm 630 Nm 860 Nm 1.500 Nm Observação: O material dos pinos e das porcas depende do material do corpo tipo "wafer" e da temperatura do meio do processo. Coloque a vedação 139 1) no flange de conexão 140. Insira o deslocador na câmara ou no tanque do deslocador. Mantenha o 244LD LevelStar 131 acima do flange de conexão. Engate o olhal 153 da corrente do deslocador no entalhe na alavanca de transmissão 133 e encaixe o corpo tipo "wafer" no flange de conexão. Não derrube o deslocador anexado! Evite carga oscilante! Defina o 244LDLevel Starpara o flange de montagem: Observação para deslocadores com diâmetros inferiores a 30 mm Deslocadores com diâmetros < 30 mm também podem ser pendurados quando o corpo tipo "wafer" já tiver sido montado. Como um auxílio à instalação, é possível puxar um fio através do furo no olhal 153. O deslocador é baixado através do corpo tipo "wafer" com esse fio, passando a alavanca de transmissão e entrando na câmara ou no tanque do deslocador. O olhal então deve ser engatado no entalhe 133 na alavanca de transmissão. Por fim, remova o fio. 153 133 Para facilitar a montagem, o suporte de montagem 132 é fixado com um pino 142 ao flange de conexão 140. É aconselhável pré-montar um pino parafusando uma porca 143 em uma rosca. Insira esse pino através do topo do suporte de montagem e flange de conexão. Parafuse um número suficiente de porcas na rosca e eixo reduzido por baixo para o corpo tipo "wafer" ficar firmemente posicionado. Coloque a vedação 139 1)no corpo tipo "wafer". Coloque o flange cego 141 no corpo tipo "wafer" de modo que os furos no flange cego e no flange de conexão 140 estejam alinhados. Insira os pinos restantes. Parafuse as porcas e aperte suavemente. Desparafuse a porca 143 e puxe o pino para baixo. 1) Ao usar uma gaxeta flexível não eletricamente condutora, o corpo tipo "wafer" deve ser aterrado, veja o Capítulo 5.2. MI EML0710 G-(en) 244LD 4.5 Deslocador 204DE Garanta a combinação correta do transmissor e do deslocador ao montar. Cada transmissor é calibrado para o respectivo deslocador de acordo com os dados do pedido na fábrica. Veja também o capítulo 3 “Rótulo de dados de ajuste”. 7 Elemento de amortecimento Em condições operacionais com fortes vibrações externas, como perto de estações de compressor, o elemento de amortecimento (Opção D) deve ser usado. Substituindo o deslocador Insira os dados alterados do deslocador no rótulo de ajuste (veja o Capítulo 3). Classificação de Pressão O deslocador deve ser projetado para a classificação de pressão do tanque – porém, pelo menos para a pressão operacional – e pedido de acordo. Aqui, a temperatura máxima possível deve ser levada em consideração. Deslocadores feitos de PTFE são produzidos com material sólido e, portanto, são adequados a todas as pressões. Elementos do deslocador unidos Deslocadores de comprimento superior a 3 metros (1 metro para PTFE) são elementos de deslocador unidos (várias seções). Os elementos do deslocador são parafusados juntos e fixados com o clipe de arame 151 para evitar entortar ou danificar os itens durante a inserção no tanque. Os elementos do deslocador com Ø < 13 mm não são parafusados juntos; eles são fixados com um gancho e um olhal 152. Fixação adicional não é necessária1). 151 152 Diâmetro > 13 mm Diâmetro < 13 mm ou PTFE 1) Em caso de uso na Zona 0, os olhais também devem ser soldados. É engatado na corrente da sessão superior do deslocador no lugar dos sete elos da corrente (105 mm). Essa mola é feita especialmente para frequência de ressonância do deslocador, e é fabricada com aço inoxidável 1,4310 (temperatura operacional até 250 °C) ou Hastelloy C (temperatura operacional até 350 °C). Uso na Zona 0 ou como Proteção contra Transbordamento conforme WHG2) Mecânica Em caso de uso na Zona 0, os deslocadores devem ser fixados para evitar oscilação quando - o deslocador for feito de metal, grupo de explosão IIC - o deslocador for feito de metal, grupo de explosão IIB/A, comprimento > 3 m - o deslocador foi feito de PTFE+25% de carbono, IIC/ B/A, comprimento > 3 m O deslocador deve ser fixado de modo a não ficar no fluxo do jato de enchimento principal. Quando usado como proteção contra transbordamento de acordo com WHG, o deslocador deve sempre ser instalado com orientação. Dispositivos de orientação com mais de 3 metros de comprimento devem também ser fixados para que não entortem. Equalização de potencial Em caso de uso na Zona 0, apenas deslocadores de metal ou PTFE +25% de carbono podem ser usados. Uma linha de equalização de potencial deve ser montada como um desvio elétrico das suspensões do deslocador se o peso do deslocador residual for de < 10 N, ou se mais de 6 pontos de contato estiverem presentes. Para evitar o perigo de ignição eletrostática, é preciso garantir uma conexão com o transmissor com boa condutividade. A resistência de volume entre a extremidade inferior do deslocador e o aterramento não pode exceder 1 MΩ. 2) Veja os certificados correspondentes para mais detalhes 8 244LD MI EML0710 G-(en) 5 CONEXÃO ELÉTRICA 5.1 Conexão do fio de sinal Conduza o cabo através do prensa-cabo 38 a partir da parte inferior; observe especialmente a blindagem. Verifique antes de montar os prensa-cabos se as roscas combinam, caso contrário, o invólucro pode ser danificado. O prensa-cabo 38 e o parafuso da tampa 39 são intercambiáveis. Conecte o sinal de entrada aos terminais 45 (+) e 46 (–). Os terminais de parafuso são adequados para seções transversais de fios de 0,3 a 2,5 mm2. Para a seleção do cabo, veja também a recomendação para os tipos de cabo de acordo com IEC 1158-2. Os transmissores são fornecidos sem prensa-cabo. O prensa-cabo utilizado deve estar de acordo com possíveis exigências Ex. Isso é responsabilidade do usuário. Observação: Para dispositivos à prova de explosão, siga a referência para o prensa-cabo e o parafuso da tampa no documento “Instruções de Segurança da Série 140” 5.2 Terra Se for necessário aterramento (p. ex., potencial equalização, proteção contra influência eletromagnética), o terminal terra 47 ou o terminal terra externo 48 deve ser conectado. Ao usar vedações não eletricamente condutoras, o corpo tipo "wafer" deve ser aterrado pelo fio E com o flange de conexão. 22 Conectando a tampa do compartimento 24 Trava da tampa 38 Prensa-cabo (diâmetro permitido do cabo de 6 a 12 mm) 39 Parafuso da tampa 45 Terminal de conexão fio cruzado “+” 46 Terminal de conexão seção “–” 47 Terminal de aterramento máx. 2,5 mm2 Soquetes de teste (Ø 2 mm) integrados ao bloco de terminais 48 Terminal de aterramento externo 50 Proteção contra sobretensão (se houver) Ações: –– Aperte a trava da tampa 24 (se fornecida) e desparafuse a tampa 22. –– Conduza o cabo através do prensa-cabo e conecte aos terminais 45, 46 e 47. –– Se necessário, conecte o terminal de aterramento externo 48. –– Parafuse a tampa 22 e instale a trava da tampa 24 (se fornecida). MI EML0710 G-(en) 244LD 9 6 COMISSIONAMENTO 8 CONFIGURAÇÃO DO TRANSMISSOR Em qualquer caso, os regulamentos de instalação e segurança devem ser verificados antes do comissionamento. Veja o documento EX EML 0010 A: “Instruções Operacionais de Segurança” Zero, valor de intervalo inferior, valor de intervalo superior e amortecimento do transmissor são definidos pelo fabricante como especificado no pedido: Depois da instalação e da conexão corretas à unidade de fonte de alimentação, o transmissor está pronto para operação: U > 12 Vcc (HART) Se for necessário configurar um valor de intervalo inferior, um valor de intervalo superior e um amortecimento devem ser verificados. Com o HART, um amperímetro pode ser conectado ao loop de corrente de saída para verificação. • Dimensões do deslocador: Comprimento, densidade, peso • Definição do valor de intervalo inferior por peso F0: sem elevação Zero = 0; com elevação Zero = Valor da elevação • Valor do intervalo superior correspondendo à força de empuxo do deslocador (veja o Capítulo 9) • Intervalo de saída e unidade Portanto, não é necessária a calibração na inicialização. Dados operacionais e dados do deslocador são armazenados no transmissor conforme o pedido. A configuração se torna necessária se esses dados desviarem-se dos valores armazenados. No caso de o pedido não incluir esses dados, o transmissor é fornecido da seguinte maneira: 7 DESCOMISSIONAMENTO Antes do descomissionamento, tome precauções para evitar perturbações: –– Observe proteção Ex. –– Desligue a fonte de alimentação. –– Cuidado com meios de processo perigosos! Com material de processo tóxico ou perigoso, observe os regulamentos de segurança relevantes. Antes de desmontar o transmissor, siga o procedimento abaixo: –– Despressurize o tanque ou a câmara do deslocador. –– Drene o meio de medição em uma câmara do deslocador. –– Proteja o meio ambiente; não deixe a substância de medição escapar. Capture e descarte-a adequadamente. O procedimento para desmontar o transmissor é o inverso do descrito para a montagem. peso do deslocador força de empuxo indicação amortecimento = 1,500 kg = 5,884 N (0,600 kg) = 0 ...100% = 8 segundos (90% do tempo) Configuração via protocolo HART • Configuração com PC e FDT-DTM • Configuração com o terminal portátil Configuração via botões operacionais A configuração pode ser feita usando os botões no transmissor. Veja a próxima página. “Aquecimento” antes da calibração Para minimizar o erro de medição a temperaturas de processo extremamente altas(ou extremamente baixas), recomenda-se deixar o transmissor atingir a temperatura operacional primeiro. 10 244LD MI EML0710 G-(en) Início da operação Alterando valores Depois da inicialização (ligar), o logotipo da Foxboro Eckardt é exibido brevemente, Ajuste linear É usado, por exemplo, no offset de PV, amortecimento e contraste do LCD: O valor atual é exibido. Com o botão MORE, o valor aumenta. Se o maior valor for atingido, recomeça do início com o menor valor. O botão tem repetição automática. Pare com o botão DONE. Depois disso, inclusive consultado se a alteração de deve ser salva. então Informações do Dispositivo... Tipo de dispositivo Versão da tarefa de medição ... e então a visualização operacional: Valor medido Linha de status Linha de status: cadeado = protegido Modo de intervalo automático Modo manual Valor medido no gráfico de barras unidade física m3 ou % A visualização operacional é a exibição na operação normal. Configuração via teclas locais e LCD Os parâmetros e configurações operacionais podem ser visualizados no site e, em alguns casos, alterados. Para operação local, um LCD gráfico completo está disponível, bem como dois botões na parte externa do invólucro. Dentro da unidade, não há outros controles. = Botão esquerdo = Botão direito Depois de acionar a capa de proteção de chave A, insira a chave de fenda ou pino (Ø < 3 mm) no furo B e pressione para baixo até o segundo ponto de pressão. Começando a partir da visualização operacional, –– o botão troca para detalhes dos valores operacionais –– o botão troca para a seleção do menu, veja a ilustração na próxima página. Se nenhum botão for pressionado dentro de 5 minutos, o display volta automaticamente para a visualização operacional. Ajuste numérico É usado, por exemplo, na medição de valores de intervalo: O valor atual é exibido e o primeiro dígito (ou sinal) é selecionado. Sempre que o botão CHANGE é pressionado, o número é contado em ordem crescente até o número desejado ser atingido. Com o botão NEXT, o próximo número é marcado e pode ser alterado etc. Depois disso, inclusive consultado se a alteração de deve ser salva. Manualmente ou Intervalo Automático? Ao pedir, o cliente determinou o intervalo e a densidade do meio de medição (ou as densidades dos meios). A partir dessas informações, o deslocador real foi fabricado. Na entrega, o modo é definido para Intervalo Automático: Os dados do deslocador (diâmetro, comprimento, peso) e a densidade dos meios foram armazenados antes da entrega via FDT/DTM no 244LD LevelStar. A partir desses dados, o offset de PV e o URV do valor de intervalo superior são calculados automaticamente, o que permite operação imediata sem qualquer calibração adicional no campo. Porém, se o método manual for preferido, os valores podem ser inseridos manualmente. No modo Manual, o método clássico pode assumir os valores perspectiva das forças de empuxo com as condições operacionais para 0% (com nível: tanque vazio) e 100% (com nível: tanque cheio). MI EML0710 G-(en) 244LD 11 12 244LD Menu 1: Back MI EML0710 G-(en) Back to Operational view. --> Ao selecionar YES , você vai para back to the operating view. Observação: Todos os submenus começam com um recurso de “voltar” que permite retorna ao menu anterior. Para melhor clareza, omitimos essa descrição. Menu: Menu language --> Com YES , volta para language selection: Há três idiomas do menu, inglês (padrão), alemão e francês. De fábrica, o idioma ativo é sempre inglês. Com DOWN, o idioma desejado é selecionado e fica ativo ao confirmar com SIM . Todos os textos agora são exibidos no idioma escolhido. Então você automaticamente vai para back to the main menu. Menu 3: Set mode --> Com YES , volta para a seleção Autorange- or Manual-. Veja também as observações na página 10 Com o MODE, você alterna do modo de Intervalo Automático para Manual. Se isso for para esperar uma alteração no valor de saída, aparece uma mensagem. Depois de confirmar com OK , volte para o menu principal. Alternando do modo de Intervalo manual para automático: Requer redefinir para as configurações de fábrica se os dados da definição manual não permitirem cálculos. Veja o menu 5.6. Menu 4: Setting PV-Offset --> Com YES , volta para definir PV-Offset: --> Com YES , o PV-Offset pode ser definido, não importa se o modo é Intervalo automático ou manual. Configuração em ajuste linear em incrementos de 0,1%, veja a página 10 O impacto esperado da alteração pode ser visto nas variáveis primárias na segunda linha. O PV-Offset calculado automaticamente resultante é exibido na terceira linha para observar a mudança e, possivelmente, retornar para o valor anterior. MI EML0710 G-(en) 244LD 13 --> Com YES , o valor do processo atual (nível: Deslocador não no meio) é capturado como o ponto zero físico. Esse item de menu é apenas para o modo manual e, portanto, o modo de intervalo automático está bloqueado (indicado por um símbolo de cadeado). --> Confirmando com YES, o valor atual será salvo como Valor do intervalo inferior. Menu 5: Additional functions --> Com YES , vai para os seguintes submenus: --> Com YES , vai para setting the damping. Primeiro, o valor atual é exibido. O valor agora pode ser ajustado com o botão segundo. Ajuste linear, veja a página 10. Então voltar ao menu. em passos de 1 --> Com YES , vai para a configuração Range setting in the Autorange mode. No modo de intervalo automático, as densidades podem ser alteradas e então imediatamente consideradas no cálculo automático. --> Com YES para inserir a density of the lower medium. O valor é inserido usando o ajuste numérico, veja a página 10. Por fim, o valor deve ser confirmado e salvo. Se a densidade do meio inferior for mais leve que a densidade do meio superior, uma mensagem de erro é exibida e o valor não é armazenado. --> Com YES para inserir a density of the upper medium. (Faça como para a densidade inferior.) Observação: Para a medição de nível, o valor é de 0,000. 14 244LD MI EML0710 G-(en) --> Com YES , o intervalo de Medição atual é exibido: Intervalo de medição Valor do Intervalo Inferior Valor do Intervalo Superior --> Com BACK para o menu anterior. --> Com YES mode. , vai para a configuração Range setting in Manual Depois de configurar as condições de operação para 0% (no nível: tanque vazio) ou 100% (no nível: tanque cheio) cada um assume o valor da força de empuxo. Ou por entrada de valores em 0% e 100%. Observação: O recurso está disponível apenas no modo Manual, o modo de Intervalo automático está bloqueado (ícone de cadeado no LCD). LRV - assume o Valor do Intervalo Inferior (0%) --> Com YES , o seguinte display aparece: --> Confirmando com YES intervalo inferior. , o valor atual será salvo como Valor do URV - assume o Valor do Intervalo Superior (100%) (Faça como para o Valor do Intervalo Inferior.) LRV - insere o Valor do Intervalo Inferior (0%) --> Com YES , o seguinte display aparece: O valor é inserido usando o ajuste numérico, veja a página 10. Na terceira linha, o valor mínimo é exibido. Por fim, o valor deve ser confirmado e então armazenado como o valor do intervalo inferior. URV - insere o Valor do Intervalo Superior (100%) (Faça como para o Valor do Intervalo Inferior.) MI EML0710 G-(en) 244LD 15 --> Com YES , vai para a seleção de função. Depois de mais confirmação, a redefinição dos componentes eletrônicos está em execução. Mesmo efeito que Ligado. --> Com YES , vai para a seleção de função. AVISO: Conforme outra confirmação, todas as configurações são redefinidas para o estado definido em fábrica e serão perdidas. Menu 6: Device informations --> YES exibe os dados armazenados no transmissor, como Tag Number Tag Name Device type Revision Nr Displacer data System-Lifetime Menu 7: LCD configuration --> Com YES , vai para settings for the LCD: --> Com YES , vai para a seleção de LCD orientation: --> Com ROTATE, o texto está “no pé”. --> Ao confirmar com OK , volta para o menu. --> Com YES , o contraste do LCD é ajustado. Ajuste linear, veja a página 10. 16 244LD MI EML0710 G-(en) 9 DIMENSIONAMENTO DO DESLOCADOR CALCULANDO FORÇAS DE PESO (veja também VDI/VDE-Diretriz 3519, folha 1) Comprimento do deslocador = intervalo de medição Forças de peso 0% Lower range value Upper range value F 0 = FG F 100 = F G - V . g . ρ2 Nível do líquido (ρ2 = desprezível) Interface (ρ2 = não desprezível) 1) ρ2 ρ1 = 100% do sinal de saída L=h b = 0% do sinal de saída 100% L=h b Tipo de medição F 0 = F G - V . g . ρ2 ρ2 ρ1 Densidade (ρ2 = densidade mín., ρ1 = densidade máx.) Comprimento do deslocador > intervalo de medição (sem elevação) Forças de peso 0% Lower range value Upper range value Nível do líquido F 0 = FG F 100 = FG - V . g . ρ1 hb L Interface F 0 = F G - V . g . ρ2 F 100 = FG - V . g ( ρ1 hb + ρ2 L - hb ) LL (ρ2 = não desprezível) ρ2 ρ1 hb (ρ2 = desprezível) = 100% do sinal de saída L = 0% do sinal de saída 100% L hb Tipo de medição ρ2 ρ1 Comprimento do deslocador > intervalo de medição (com elevação) Forças de peso 0% Lower range value Upper range value Nível do líquido F0 = FG - V . g . ρ1 h0 L F 100 = FG - V . g . ρ1 h0 + hb L Interface F0 = FG - V . g ( ρ1 h0 + ρ2 L - h0 ) LL F 100 = FG - V . g ( ρ1 h0 + hb + ρ2 L - hb - h0 ) LL FG F0 F100 FA V [ N ] Força de peso do deslocador na atmosfera [ N ] Ação da força de peso no ponto de suspensão do deslocador no valor do intervalo inferior [ N ] Ação da força de peso no ponto de suspensão do deslocador no valor do intervalo superior [ N ] Força de empuxo do deslocador (FA = F0 - F100) [ m³ ] Volume do deslocador (especificado no rótulo de dados em cm³!) ρ1 ρ2 g L h0 hb b h 0 ρ2 ρ1 h h 0 (ρ2 = não desprezível) ρ2 ρ1 = 100% do sinal de saída L (ρ2 = desprezível) 100% hb = 0% do sinal de saída L Tipo de medição [ kg/m³ ] Densidade do líquido [ kg/m³ ] Densidade do gás ou líquido mais leve [ m/s² ] Aceleração local devido à gravidade (ex., 9,807 m/s²) [ m ] Comprimento do deslocador [ m ] Valor do intervalo inferior [ m ] Intervalo de medição Atenção: 1 kg gera uma força de 9,807 N 1) ρ2 é desprezível se ρ2= gás à pressão atmosférica ou com relação ρ2 : ρ1 menor que 0,5%. MI EML0710 G-(en) 17 244LD Gráfico para determinar o diâmetro do deslocador Meio de densidade em kg/m3 ( ρ1- ρ2) Diâmetro do deslocador em mm , , , , , Dmáx. , Dmédio Dmín. , , , , , , , Força de empuxo FA em N Intervalo de medição O transmissor é projetado para um intervalo de medição de força de empuxo de pelo menos 2 até um máximo de 20 N. Força de peso O peso máximo do deslocador FGmáx. é de 40 N para medições de nível. Para medições de densidade ou interface, o deslocador deve ser dimensionado de modo que, depois de deduzir FA dos meios de processo mais leves, a força restante F0 não exceda 40 N. Determinando os diâmetros do deslocador Para uso ideal do transmissor, o deslocador deve ser dimensionado de modo que a maior força de empuxo possível seja gerada sobre o intervalo de medição. Por outro lado, o diâmetro máximo possível do deslocador deve ser levado em consideração. No gráfico acima, o diâmetro do deslocador pode facilmente ser estimado, dependendo do intervalo de medição e da força de empuxo. , , , , , , , , , , Intervalo de medição em m A equação a seguir pode ser usada para dimensionar de maneira exata o deslocador: D = 1000 4 FA g ( 1 2 ) L [ mm ] D = Dimensão externa do deslocador em mm FA = Força de empuxo do deslocador em N g = Aceleração devido à gravidade (9,807 m/s²) ρ1 = Densidade do líquido mais pesado em kg/m³ ρ2 = Densidade do gás ou líquido mais leve em kg/m³ L = Intervalo de medição em mm Exemplo: Intervalo de medição: 1,500 m ρ1= 1000 kg/m³ ρ2=desprezível 18 244LD MI EML0710 G-(en) 10 Princípio de medição Alterações nas forças de empuxo são proporcionais às mudanças no nível do líquido e são convertidas para um sinal de medição. O deslocador é totalmente imergido para detecção de nível de densidade e interface. (veja a Diretriz 3519 de VDI/VDE, folha 1) Qualquer corpo imergido em um líquido está sujeito à força de empuxo de Arquimedes, que depende da densidade do líquido. Isso é explorado para determinar o nível do líquido, a densidade e o nível de interface suspendendo um deslocador com formato cilíndrico constante em um líquido. O seguinte se aplica em geral à força de empuxo atuando sobre o deslocador: FA = Vx ⋅ ρ1 ⋅ g + (V-Vx) ⋅ ρ2 ⋅ g C ar ac te rís tic a m do ei d o es m lo ed ca id do o r de nt ro do A força que atua sobre o transmissor é inversamente proporcional a mudanças no nível do líquido. Intervalo de medição Nível do líquido FA Força de empuxo V Volume do deslocador Vx Volume do meio deslocado pelo corpo de medição com densidade ρ1 ρ1 Densidade média do meio mais pesado ρ2 Densidade média do meio mais leve g Aceleração local devido à gravidade FG Força do peso do corpo do deslocador MI EML0710 G-(en) 244LD 19 10.1 Diagrama de blocos com comunicação HART 50/60 Hz Filtro de Frequência de Linha Sinal, proporcional à força Dados de Impressão Digital Tempo de amortecimento Compensação de temperatura de linearização Filtro Tempo da faixa de tolerância Intervalo máximo: calibração de base convencional da calibração automática Smart Smoothing Ajuste do Sensor Unit Dados do deslocador (const.): - Comprimento - Diâmetro - Força de peso Meio - Densidade - Temperatura Ponto zero MBA, MBE calibração automática (MBA, MBE, NP) Ajuste zero % Unit (Força de empuxo = 0) física Zero (entrada manual) Sinal, equivalente à força OUT Selecionar Saída digital Aumento de escala Fator de intervalo de medição Offset zero (Parâmetro de Correção) Unit (para intervalo de medição) Intervalo de Medição Função da característica MBA e MBE (entrada manual) Personalizado linear Valor de substituição Manter último valor Saída analógica Comportamento de falha 10.2 Explicações para Diagramas de Bloco Sensor O sensor de força é uma ponte Wheatstone de quatro elementos de medidor de tensão de metal e uma resistência Ni100 para medição de temperatura. Filtro de Supressão de Frequência de Linha Há a seleção para filtrar o sinal de ruído de 50 Hz ou 60 Hz. Característica de Linearização e Compensação de Temperatura do Sensor O sinal do sensor é linearizado e compensado para temperatura pela temperatura do sensor incluído. A linearização ocorre por meio dos chamados dados de impressão digital, que são determinados durante a produção de cada sensor. Em fábrica, os dados de impressão digital são carregados no amplificador. 20 244LD MI EML0710 G-(en) Valor Medido Smart Smoothing Na fábrica, a faixa Smart Smoothing é definida para 2% do intervalo do sensor. O tempo de integração do valor médio é definido para 10 segundos. Ajuste do Sensor Zero e intervalo do sensor de força são ajustados de fábrica. É possível calibrar para zero (alinhamento da situação) com as chaves externas. Intervalo estático com Smart Smoothing Largura de banda de Smart Smoothing Zero sem Smart Smoothing Valor do Intervalo Inferior Valor Medido t/s Valor do Intervalo Superior Transferir função/Característica As características estão disponíveis como linear e personalizada. Com a “personalizada”, há 32 valores x/y disponíveis. O padrão com Nível é “linear”. dinâmico t= 10 s Intervalo t/s Zero Intervalo MI EML0710 G-(en) 244LD Configuração do Valor Medido O usuário pode definir o valor medido e a unidade. Novo Valor p. ex., 2 m 21 Configuração do Valor de Saída O valor de saída é aquele medido entre o valor do intervalo inferior e o valor do intervalo superior. Valor e unidade podem ser livremente selecionados. O valor de substituição afeta a saída. Valor de saída superior, p. ex., 100% 19,613 N Valor de Saída Inferior ex., 0% Valor do Intervalo Inferior, p. ex., 0,5 m Configuração do Intervalo O intervalo de medição é aquele entre o valor do intervalo inferior e o valor do intervalo superior. O valor do intervalo inferior é o peso do deslocador. O valor do intervalo inferior sem elevação é 0. Com a elevação, o valor da elevação deve ser inserido. Valor do intervalo superior, p. ex., 1,5 m Valor do Intervalo Superior ex., 1,5 m Substituição / Valor Substituto (apenas HART) No caso de erro, a saída mantém o último valor ou dá um valor de substituição configurável. Se o erro não existir mais, o “último valor” e/ou o valor de substituição são levados de volta (automática ou manualmente). Multidrop (apenas HART) Com FDT-DTM ou um Terminal Portátil é possível trocar –– Amplificador HART entre “analógico” e “multidrop” –– Amplificador FoxCom entre “analógico” e “digital”. Com o modo HART “Multidrop”, a saída tem um sinal digital, o valor medido é modulado para um sinal CC de 4 mA. Valor do Intervalo Inferior, p. ex., 0,5 m Valor medido O software FDT-DTM permite simular o valor medido e gravar valores de saída diretamente na saída. Filtro O sinal de saída é amortecido. O tempo de amortecimento pode ser definido entre 0 e 32 segundos. 22 244LD MI EML0710 G-(en) 11 ALIMENTAÇÃO DO TRANSMISSOR 11.1 Geral Dependendo da aplicação do transmissor, exigências distintas são feitas na alimentação. Os diferentes modos operacionais são explicados nos capítulos a seguir. Os diagramas de fios são mostrados nas figuras a seguir. As unidades de fonte de alimentação para diferentes aplicações (direta/via unidade de fonte de alimentação de transmissores, HART/sem comunicação, intrinsecamente/não intrinsecamente) são listadas na tabela a seguir. Todos os dispositivos de alimentação listados estão disponíveis para aplicação intrinsecamente segura ou não intrinsecamente segura. Aplicação Alimentação (recomendado) sem comunicação direto,MT228 HART direto,MT228 4.0,20 mA intrinsecamente seguro MT/MUS 4 ... 20 mA Transmissor unidade de fonte de alimentação PCS ou controlador L 4 ... 20 mA US 4 ... 20 mA RB DCS ou Controlador Transmissor fonte de alimentação US = 17,75 ... 42 V comunicação 12 ... 42 V RB DCS ou Controlador 11.2.1 Alimentação via unidade de fonte de alimentação A fonte de alimentação é recomendada para uso normal. Previnem-se interferências devido à separação galvânica do loop de medição, da carga e da fonte de alimentação na unidade de fonte de alimentação (veja a Fig. 1) Essa versão mais simples pode ser recomendada apenas para uma alimentação ou loops de medição com separação galvânica (veja Fig. 2) A impedância de carga máxima é calculada por: RBmáx = (Umáx-12V)/Imáx Umáx: tensão máxima permitida (conforme especificações do produto), depende do tipo de transmissor e da explosão proteção US = 15 ... 42 V Transmissor comunicação 11.2.2 Alimentação direta RB Alimentação direta (Fig. 2) L comunicação Transmissor sala de controle Us comunicação MT / MUS L Alimentação via unidade de fonte de alimentação (Fig. 1) L sala de controle terminais comunicação comunicação 11.2 Visão geral dos tipos de aplicação terminais área classificada Alimentação direta com comunicação (Fig. 4) Aplicação e fonte de alimentação associada área classificada Alimentação via unidade de fonte de alimentação com comunicação (Fig. 3) RB PCS ou controlador Imáx: 1 2 mA para transmissor no modo digital FOXCOM, 23 mA para todos os outros transmissores (HART e FOX-COM) MI EML0710 G-(en) 244LD Valores padrão Carga permitida dependendo da tensão de alimentação. Exemplo de transmissor HART série 140 não intrinsecamente seguro (Fig. 6) RB Ω U máx 23 Comunicação HART Carga mín. 250Ω Capacidade máxima < 200 nF da linha = 42 V 1400 Comprimento máximo da linha ~ 3.300 m 1.150 O respectivo diagrama de fios é mostrado na Figura 3. 800 450 100 122028 36 42 V US A Figura 4 mostra o respectivo diagrama de fios sem a unidade de fonte de alimentação para loops com separação galvânica. A ferramenta operacional (terminal portátil, PC com software e modem FDTDTM) pode ser conectada às posições rotuladas. Dependendo da aplicação, os regulamentos para proteção contra explosão precisam ser seguidos também para as ferramentas operacionais! 11.2.3 Comunicação Em contraste com o modo operacional convencional no loop de dois fios, uma carga mínima para todos os modos de comunicação precisa estar disponível. Se essa carga for selecionada para um valor muito baixo, a comunicação entra em curto-circuito. (As unidades de fonte de alimentação FOXBORO ECKARDT com capacidade para comunicação MT228 já têm as respectivas cargas.) Além disso, comprimentos de linha precisam ser limitados aos valores máximos permitidos para a respectiva comunicação 11.2.4 Aplicação intrinsecamente segura Para aplicação intrinsecamente segura, geralmente recomenda-se usar a respectiva unidade de fonte de alimentação. A fiação deve ser feita conforme os respectivos padrões e regulamentos nacionais e internacionais – como descrito na “Alimentação via unidade de fonte de alimentação”. Se comunicação também for necessária, todas as diretrizes do capítulo “Comunicação” precisam ser observadas. Além disso, a aplicação das ferramentas operacionais e seus valores de limite permitidos devem ser seguidos. 24 244LD MI EML0710 G-(en) Especificações do Produto para Transmissores Inteligentes Especificações do Produto: Dispositivo: PSS EMP0610 141GP Transmissor Inteligente de Pressão de Medidor PSS EMP0620 142AP Transmissor Inteligente de Pressão Absoluta PSS EMP0630 143DP Transmissor d/p Inteligente PSS EML2610 144FP Transmissor d/p inteligente para nível, interface e densidade do líquido - montado em flange PSS EML0610 144LD Transmissor Inteligente de Empuxo para Nível de Líquido, Interface e Densidade com Deslocador e Tubo de Torque PSS EML0710 244LD Transmissor Inteligente de Empuxo para Nível de Líquido, Interface e Densidade com Deslocador e Tubo de Torque PSS EML1610 144LVD Transmissor de Sensor Inteligente de Empuxo para Nível de Líquido, Interface e Densidade com Deslocador PSS EML1710 244LVP Transmissor de Sensor Inteligente de Empuxo para Nível de Líquido, Interface e Densidade com Deslocador PSS EML0901 204xx Acessórios para Transmissor de Empuxo PSS EMO0100 Acessórios para Dispositivos com o Protocolo HART Sujeito a alterações - reimpressão, cópia e tradução são proibidas. Produtos e publicações normalmente são citados aqui sem referência a patentes existentes, modelos de utilitário registrados ou marcas comerciais. A falta dessa referência não justifica a pressuposição de que um produto ou símbolo é livre. FOXBORO ECKARDT GmbH Postfach 50 03 47 D-70333 Stuttgart Fone 49(0)711 502-0 Fax 49(0)711 502-597 Correio para: [email protected] http://www.foxboro-eckardt.eu DOKT 556 588 171~1
Download