0
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO
RIO GRANDE DO SUL
UNIJUÍ
Mestrado em Modelagem Matemática
Angelo Fernando Fiori
MODELAGEM MATEMÁTICA DA DINÂMICA DE UMA
TRANSMISSÃO MECÂNICA DO TIPO FUSO DE ESFERAS DE
UM ROBÔ GANTRY
Panambi – RS, 2015
1
ANGELO FERNANDO FIORI
MODELAGEM MATEMÁTICA DA DINÂMICA DE UMA
TRANSMISSÃO MECÂNICA DO TIPO FUSO DE ESFERAS DE
UM ROBÔ GANTRY
Dissertação de Mestrado, apresentada à
Unijuí como parte dos requisitos para a
obtenção
do
grau
de
Modelagem Matemática.
Orientador: Antonio Carlos Valdiero, Dr. Eng.
Co-Orientador: Luiz Antonio Rasia, Dr.
Panambi – RS, março 2015
Mestre
em
2
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO
RIO GRANDE DO SUL – UNIJUÍ
DEPARTAMENTO DE CIÊNCIAS EXATAS E ENGENHARIAS – DCEEng
PROGRAMA DE PÓS-GRADUAÇÃO STRICTO SENSU EM MODELAGEM
MATEMÁTICA
MODELAGEM MATEMÁTICA DA DINÂMICA DE UMA
TRANSMISSÃO MECÂNICA DO TIPO FUSO DE ESFERAS DE
UM ROBÔ GANTRY
Elaborada por:
Angelo Fernando Fiori
Como requisito parcial para obtenção do grau de Mestre em Modelagem
Matemática
Comissão Examinadora
_____________________________________________________
Prof. Dr. Eng. Antonio Carlos Valdiero (Orientador) – DCEEng/Unijuí
_____________________________________________________
Prof. Dr. Luiz Antonio Rasia (Co-orientador) – DCEEng/Unijuí
_____________________________________________________
Prof. Dr. Eng. Henrique Simas – POSMEC/UFSC
_____________________________________________________
Prof. Dr. Eng. Manuel Martín Pérez Reimbold – DCEEng/Unijuí
Panambi/RS, 19 de março de 2015.
3
Aos meus pais Nilo e Irene e ao meu irmão Leonardo.
À minha amada, Elisa.
Aos amigos e amigas, colegas e familiares.
A todos os mestres que a vida me deu.
4
AGRADECIMENTOS
Agradeço a DEUS, força presente e companheira que existe e caminha
ao lado, pelo dom da vida e por me permitir encontrar pessoas maravilhosas.
Ao meu pai Nilo, minha mãe Irene e meu irmão Leonardo que foram
rocha firme nestes anos, me apoiando e incentivando. Sendo-me propícios e
zelosos. Obrigado pelo seu amor e apoio incondicionais.
A minha noiva Elisa e sua família, pelos belos momentos que pudemos
desfrutar juntos, no amadurecimento de nosso amor e nossa relação.
Aos demais amigos e familiares, os ainda constantes e àqueles que
partiram desta vida, todos sempre estiveram presentes nos melhores e piores
momentos, contribuindo para minha vida. Obrigado mesmo!
Aos casais Zaida e Arthur e Edeltraud e Elmar, que me acolheram
nestes anos em Ijuí e Panambi. Obrigado pelo carinho de vossos lares e de
suas companhias.
Agradeço aos professores Valdiero e Rasia, pelos belos momentos que
pudemos partilhar, pelos conhecimentos e paciência. Grato pela amizade e
confiança.
A todos(as) os bolsistas do laboratório de projetos em especial ao
Andrei, Ismael e Odmartan, com os quais tive a dádiva de conviver nestes
anos. Como é bom ter a certeza de sua amizade! Obrigado pela alegria dos
momentos!
A CAPES pelo apoio financeiro na forma de bolsa e à Unijuí pela
estrutura humana e de recursos.
À secretária, colegas e professores do mestrado, bem como os
professores e colegas da graduação, aos quais sou grato pela graça da
amizade e constância da presença, estimulando e incentivando, contribuindo
com a nossa formação humana e profissional.
5
“É uma ilusão de alguns cientistas pensar
que o caminho para um mundo melhor passa
pela multiplicidade das pesquisas. Já sabemos demais!
Se usássemos um centésimo do que já sabemos,
o mundo seria maravilhoso.
O que nos falta não é conhecimento.
É amor!”
Rubem Alves
6
RESUMO
Objetiva-se com este trabalho, desenvolver a modelagem matemática da
dinâmica de uma transmissão mecânica do tipo fuso de esferas de um robô
Gantry acionada por motorredutor de corrente alternada com inversor de
frequência, considerando-se a não linearidade do atrito e da folga. Estas não
linearidades dificultam o desenvolvimento de estratégias mais precisas de
controle, afetando diretamente a segurança, a produtividade e a qualidade das
tarefas que estes robôs desempenham, as quais estão especialmente
relacionadas a aplicações industriais de alta robustez. Construiu-se o protótipo
de uma junta do robô Gantry, o qual foi utilizado para fazer a aquisição de
dados experimentais e posteriormente validar a modelagem proposta através
de simulações computacionais. Para isso o protótipo conta com sensores de
medição de deslocamentos (angulares e linear) e a utilização de um painel de
comandos a partir do inversor de frequência, o qual envia os sinais de controle
ao robô. O sistema de aquisição de sinais e controle é composto por uma placa
dSPACE 1104 montada em microcomputador. Como resultados, tem-se a
sistematização da modelagem matemática de um manipulador robótico Gantry
acionado por transmissões do tipo fuso de esferas com motor elétrico de
corrente alternada e inversor de frequência, a qual inclui as principais não
linearidades, a proposta metodológica para identificação das não linearidades
de atrito e folga, além da validação experimental do modelo que inclui as
principais características de atrito em baixa velocidade. Pretende-se contribuir
no desenvolvimento de modelos matemáticos eficazes para fins de projeto, de
simulação e de síntese de estratégias de controle e compensação baseadas
em modelo.
Palavras-chave: Robôs de Pórtico; Acionamento Elétrico; Fuso-Castanha;
Modelagem Matemática; Dinâmica da Junta Robótica.
7
ABSTRACT
The objective of this work is to develop mathematical modeling of the dynamics
of a mechanical transmission type ball screw in a Gantry robot driven by
alternating current gear motor with frequency inverter, considering the
nonlinearity of friction and backlash. These nonlinearities prevent the
development of more precise control strategies, directly affecting the safety,
productivity and the quality of jobs that these robots play, which are especially
related to industrial high strength applications. The prototype was constructed of
a joint of the robot Gantry, which was used to make the acquisition of
experimental data and subsequently validate the proposed model using
computer simulations. For this prototype has displacement measuring sensors
(linear and angular), and using a control panel from the frequency inverter,
which sends control signals to the robot. The data acquisition and control
system comprises a plate dSPACE 1104 mounted on microcomputer. As
results, there is the systematization of mathematical modeling of a robotic
manipulator Gantry driven by transmission type ball screw with electric motor
and
alternating
current
frequency
inverter,
which
includes
the
main
nonlinearities, the methodology for identification of nonlinearity of friction and
backlash, in addition to the experimental validation of the model that includes
the main friction characteristics at low speed. It is intended to contribute to the
development of efficient mathematical models for design purposes, simulation
and synthesis of control strategies and compensation based on model.
Keywords: Gantry Robot; Electric Drive; Ball-Screw; Mathematical Modelling;
Robot Joint Dynamics.
8
Lista de Figuras
Figura 1 - Fuso de Esferas : (a) Adotada na Bancada Experimental; (b)
Desenho Esquemático e Principais Componentes – (1) Fuso, (2) Castanha, (3)
Flange, (4) Esferas.......................................................................................... 21
Figura 2 - Desalinhamentos do Acoplamento Elástico .................................... 21
Figura 3 - Projeto do Robô Gantry.................................................................. 30
Figura 4 - Componentes do Mecanismo do Robô Gantry ............................... 31
Figura 5 – Fotografia do Protótipo do Robô Gantry ........................................ 32
Figura 6 - Componentes do Sistema de Acionamento.................................... 33
Figura 7 – Parte do Sistema de Controle: (1) dSPACE 1104; (2) Tela do
ControlDesk .................................................................................................... 35
Figura 8 - Fonte de Alimentação HP 6543A ................................................... 35
Figura 9 - Encoder Incremental com Destaque ao Disco Codificado Defasado
........................................................................................................................ 36
Figura 10 - Transdutor de Deslocamento Sem Contato: (a) Faixa de Medição;
(b) Desenho do Sensor ................................................................................... 37
Figura 11 - Encoders e Transdutor ................................................................. 37
Figura 12 - Parte do Sistema de Controle: (a) Inversor de Frequência, Caixa de
Comando e Disjuntor; (b) Multímetros e Wattímetro........................................ 38
Figura 13 - Conexão da Instrumentação ........................................................ 39
Figura 14 - Caixa de Comandos: (1) Liga/Desliga Geral; (2) Sentido do
Deslocamento Angular – Desliga/Negativo e Liga/Positivo; (3) Comando –
Liga/Caixa de Comando e Desliga/Inversor de Frequência; (4) Gira/Pára ...... 40
Figura 15 - Marcações das Posições dos Intervalos no Potenciômetro .......... 40
Figura 16 – Conexões de Potência do Inversor de Frequência ...................... 41
Figura 17- Diagrama de Blocos do Inversor de Frequência CFW 10 .............. 42
Figura 18 - Descrição da Conexão de Controle do CFW 10 ........................... 43
Figura 19 - Diagrama de Funcionamento da Placa Eletrônica ........................ 44
9
Figura 20 – Desenho Esquemático para a Modelagem da Junta Robótica
Considerando os Principais Elementos e Não Linearidades ........................... 48
Figura 21 - Diagrama de Corpo Livre com a Representação dos Torques
Atuantes no Eixo-Fuso .................................................................................... 49
Figura 22 - Forças Atuantes na Dinâmica da Castanha ................................. 50
Figura 23 - Alguns Efeitos do Atrito no Movimento ......................................... 53
Figura 24 - Representação do Atrito Estático e da Aproximação de Karnopp 55
Figura 25 - Característica do Atrito de Coulomb ............................................. 55
Figura 26 - Característica do Atrito Viscoso ................................................... 56
Figura 27 - Característica do Atrito de Arraste................................................ 56
Figura 28 - Característica do Atrito de Stribeck .............................................. 57
Figura 29 - Combinação das Características do Atrito em Regime Permanente
........................................................................................................................ 57
Figura 30 - Desenho Esquemático da Deflexão Microscópica das Cerdas no
Modelo Dinâmico do Atrito LuGre e a Representação das Variáveis .............. 58
Figura 31 - Gráfico da Função Utilizada Para a Obtenção do Atrito Estático .. 60
Figura 32 - Representação da Não Linearidade da Folga: (a) Desenho
Esquemático; (b) Gráfico do Modelo ............................................................... 62
Figura 33 – Eixos Coordenados Sob Cada Elo Segundo a Convenção D-H .. 65
Figura 34 - Representação dos Parâmetros D-H............................................ 66
Figura 35 - Determinação dos Coeficientes
e
.......................... 72
Figura 36 - Determinação dos Coeficientes
e
.......................... 73
Figura 37 - Determinação dos Coeficientes
e
.......................... 74
Figura 38 - Determinação dos Coeficientes
e
.......................... 75
Figura 39 - Coleta dos Dados para a Identificação do Atrito ........................... 79
Figura 40 - Coleta de Dados da Instrumentação: um Wattímetro (3), um
Voltímetro (2) e um Amperímetro (1) ............................................................... 79
Figura 41 - Deslocamento Positivo na Posição “c” e Ajuste da Reta no Trecho
de Deslocamento Linear ................................................................................. 82
Figura 42 - Deslocamento Negativo na Posição “c” e Ajuste da Reta no Trecho
de Deslocamento Linear ................................................................................. 83
Figura 43 - Gráfico do Mapa Estático do Atrito ............................................... 86
Figura 44 - Mapa Estático do Atrito Relacionando no Eixo
(
) e no Eixo
a Velocidade (
a Força de Atrito
) em Regime Permanente........................ 87
Figura 45 - Diagrama do Procedimento Para a Identificação da Folga ........... 88
10
Figura 46 - Identificação Experimental da Folga: Deslocamento Angular
Completo com Inversão de Movimento ........................................................... 89
Figura 47 - Detalhe do Primeiro Ciclo Completo de Movimento Angular ........ 90
Figura 48 - Folga no Acoplamento Elástico .................................................... 90
Figura 49 - Identificação Experimental da Folga: Deslocamento Linear
Completo com Inversão de Movimento ........................................................... 91
Figura 50 - Detalhe do Primeiro Ciclo Completo de Movimento Linear ........... 92
Figura 51 - Folga na Castanha ....................................................................... 92
Figura 52 - Diagrama de Blocos do Modelo da Massa Incorporando a Dinâmica
do Atrito .......................................................................................................... 94
Figura 53 - Modelo Dinâmico do Atrito LuGre................................................. 94
Figura 54 – Deslocamento Negativo para a Validação do Modelo Dinâmico
Sem Folga ...................................................................................................... 95
Figura 55 - Deslocamento Positivo para a Validação do Modelo Dinâmico Sem
Folga ............................................................................................................... 96
Figura 56 - Visualização do Projeto da Placa Eletrônica ...............................106
Figura 57 - Projeto da Placa Eletrônica .........................................................106
Figura 58 - Diagrama Esquemático da Placa de Comando ...........................107
11
Lista de Tabelas
Tabela 1 - Características do Motor CA e do Redutor de Engrenagens .......... 33
Tabela 2 - Características dos Eixos, Castanhas e Acoplamento Elástico ...... 34
Tabela 3 - Especificações da Fonte de Alimentação HP ................................. 36
Tabela 4 - Características do Encoder Incremental e Transdutor de
Deslocamento Linear ...................................................................................... 38
Tabela 5 - Características da Instrumentação Utilizada .................................. 39
Tabela 6 - Descrição do Inversor de Frequência ............................................ 41
Tabela 7 - Relações e Grandezas Aplicadas aos Movimentos Estudados ...... 47
Tabela 8 - Descrição dos Parâmetros e Variáveis do Modelo do Eixo-Fuso ... 50
Tabela 9 - Descrição dos Parâmetros e Variáveis do Modelo Castanha-Massa
........................................................................................................................ 51
Tabela 10 – Descrição dos Parâmetros e Variáveis do Modelo da Não
Linearidade da Folga ...................................................................................... 62
Tabela 11 - Parâmetros D-H ........................................................................... 65
Tabela 12 - Valores Determinados para os Parâmetros Cinemáticos ............. 75
Tabela 13 - Dados de Corrente, Tensão e Potência Coletadas em Regime
Permanente .................................................................................................... 80
Tabela 14 - Cálculo dos Torques em Regime Permanente a partir da Potência
Elétrica e Rendimento com “P” Para Positivo e “N” Para Negativo.................. 84
Tabela 15 - Velocidades e Torques nos Testes em Regime Permanente ....... 85
Tabela 16 - Parâmetros para o Cálculo das Características do Atrito ............. 87
Tabela 17 - Parâmetros para a Validação do Modelo Sem Folga ................... 93
12
Lista de Símbolos
Letras Gregas
Ângulo de deslocamento angular no eixo motor
Velocidade no eixo motor
Ângulo formado entre eixos
e
Deslocamento angular do fuso
Velocidade angular do fuso
Velocidade angular em regime permanente do fuso
Aceleração angular do fuso
Desalinhamento angular
Função impulso
Função de atrito estático em baixas velocidades
Ângulo formado entre eixos
e
Coeficiente de rigidez das deformações microscópicas
Coeficiente de amortecimento
Coeficiente de amortecimento viscoso
Coeficiente de amortecimento viscoso positivo
Coeficiente de amortecimento viscoso negativo
Rendimento elétrico
Vetor das velocidades das juntas rotativas
Velocidades angulares das juntas rotativas
Letras Latinas
Corrente contínua
Corrente alternada
Convenção de Denavit-Hartemberg
Conexão para o terra
Redes de alimentação CA
Redes de alimentação CA
Redes de alimentação CA
Conexão de potência
Conexões para o motor
Entrada digital 1 (habilita geral)
Entrada digital 2 (sentido do deslocamento angular)
Entrada digital 3 (controle local/remoto)
Entrada digital 4 (gira/pára)
Referência
Entrada analógica 1 (corrente/tensão)
Contato do relé
Termistor de resistência elétrica
Acionador
Relé 1
Rádio frequência
Matriz de transformação homogênea que relaciona o
[
[
[
[
[
[
[
[
]
[
[
[
[
[
[
]
]
]
]
]
]
]
]
]
]
]
]
]
13
,
,
movimento de cada elo com o anterior
Matriz de transformação homogênea que relaciona o
efetuador final à base
Vetor de posição em relação à base
Vetor de posição em relação à base
Eixos coordenados de referência
Vetor das velocidades das juntas prismáticas
Velocidades lineares das juntas prismáticas
Distância entre eixos
Ordenada medida ao longo do eixo
Valores mínimos e máximos da ordenada medida ao
longo do eixo
Desalinhamento axial
Desalinhamento radial
Desalinhamento angular
Quantidade de movimento linear
Quantidade de movimento angular
Potência mecânica
Potência elétrica
Força
Força de reação
Força de atrito
Força de atrito equivalente
Valor máximo da força de atrito estático
Força de atrito de Coulomb
Coeficiente de arraste
Coeficiente de atrito viscoso
Coeficiente de amortecimento equivalente
Tempo inicial do movimento
Relação de transmissão
Massa
Massa deslocada
Massa equivalente
Sinal de controle
Passo do fuso
Momento de inércia em relação ao eixo
Distância até o eixo de rotação
Torque
Torque de carga
Torque motor
Torque de atrito
Momento de inércia do eixo motor
Matriz Jacobiana
Matriz Jacobiana das juntas prismáticas
Matriz Jacobiana das juntas rotativas
Matriz dos efeitos centrífugo e de Coriolis
Vetor de torques gravitacionais
Matriz de inércia
Matriz de inércia equivalente
Posições das juntas
[ ]
[ ]
[ ]
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
[
]
[
]
[ ]
[
]
[
]
[
]
[
]
[
]
14
,
Velocidades de referência das juntas
Aceleração de referência das juntas
Velocidades de referência da junta prismática
Velocidades de referência da junta rotativa
Vetor de velocidades das juntas
Força no efetuador final
Deslocamento linear
Deslocamento mínimo e máximo
Velocidade linear
Aceleração linear
Condição de partida
Velocidade em regime permanente
Velocidade de Stribeck
Função de atrito
Função de atrito em regime permanente
Funções de projeção
Posição inicial do lado esquerdo
Posição inicial do lado direito
Deformação no movimento de predeslizamento
Deslocamento da força de quebra
Valor máximo das microdeformações
Microdeformações em regime permanente
Variação da deformação
Símbolos Matemáticos
()
( )
( )
( )
( )
Para todo, para qualquer
Elemento pertence
Conjunto dos número reais
Derivada primeira
Derivada segunda
Implica
Vetor
Produto Vetorial
[ ]
[ ]
[
]
[
]
[ ]
[
]
[
]
[
[
[
[
[
[
]
]
]
]
]
]
15
Sumário
1.
2
3
4
Introdução ................................................................................................ 17
1.1
Generalidades .................................................................................... 18
1.2
Particularidades ................................................................................. 19
1.3
Revisão Bibliográfica .......................................................................... 23
1.4
Objetivos, Metodologia e Organização do Trabalho ........................... 27
Descrição da Bancada Experimental ........................................................ 30
2.1
Mecanismo......................................................................................... 31
2.2
Acionamento ...................................................................................... 32
2.3
Sistema de Controle e Instrumentação .............................................. 34
Modelagem Matemática ........................................................................... 45
3.1
Introdução .......................................................................................... 45
3.2
Hipóteses da Modelagem................................................................... 45
3.3
Modelagem Dinâmica do Fuso de Esferas ......................................... 48
3.4
Modelagem Dinâmica da Castanha ................................................... 50
3.5
Modelagem Dinâmica da Junta Sem Folga ........................................ 51
3.6
Modelagem da Dinâmica do Atrito ..................................................... 53
3.7
Modelagem da Dinâmica da Não Linearidade da Folga ..................... 61
3.8
Modelagem Dinâmica da Junta com Folga......................................... 62
3.9
Equações da Cinemática do Robô Gantry ......................................... 63
3.10
Modelagem Dinâmica do Robô Gantry ........................................... 69
3.11
Discussões ..................................................................................... 76
Resultados ............................................................................................... 78
4.1
Introdução .......................................................................................... 78
16
4.2
Identificação Experimental das Características Não Lineares ............ 78
4.2.1
Atrito ............................................................................................ 78
4.2.2
Folga ........................................................................................... 88
4.3
Validação do Modelo Matemático Sem a Dinâmica da Folga ............. 93
5
Conclusões e Perspectivas Futuras.......................................................... 97
6
Referências Bibliográficas ........................................................................ 99
7
APÊNDICE ..............................................................................................105
Apêndice A- Circuito eletrônico e projeto do drive de comando ..................106
Apêndice B – Programa para Ajuste de Curva ao Mapa Estático do Atrito .108
17
1. Introdução
Os modelos matemáticos são muito importantes para prever o
comportamento do sistema (SLOTINE e LI, 1991). Ao prever o comportamento,
o robô pode ser melhor projetado e dimensionado a partir das especificações
de componentes, além de permitir simular, analisar e controlar o desempenho
na tarefa programada.
Estes fatores estão intrinsecamente ligados às aplicações de robótica
em segurança, produtividade e qualidade. Quer-se com esta pesquisa modelar
matematicamente as não linearidades presentes na transmissão do tipo fuso
de esferas em robôs do tipo Gantry.
Esta pesquisa do Mestrado em Modelagem Matemática está ligada à
linha de pesquisa denominada “Modelagem Matemática de Sistemas Não
Lineares e Controle de Sistemas Dinâmicos” e possui os seguintes diferenciais
em relação à literatura recente
(DOUAT, 2014; HANIFZADEGAN E
NAGAMUNE, 2015; SHIMADA et al., 2013; YANG, YAN E HAN, 2015) os quais
são o destaque deste trabalho:
Construção e modelagem matemática da dinâmica do protótipo
de um robô Gantry com junta prismática com transmissão
mecânica do tipo fuso de esferas e acoplamento elástico,
acionada por motorredutor elétrico de corrente alternada com
utilização de inversor de frequência;
Inclusão da dinâmica do atrito na modelagem da junta robótica;
Identificação experimental das características não lineares do
atrito e da folga;
Simulação computacional e validação experimental do modelo
dinâmico da junta do protótipo do robô Gantry.
O estado da arte das pesquisas relacionadas encontra-se melhor
descrito posteriormente.
18
Além disso, conforme destacam Tao e Kokotović (1995), algumas não
linearidades, tais como a folga e o atrito, são pouco estudadas enquanto
pesquisa teórica-experimental, de modo que controle de sistemas onde se
consideram tais não linearidades são um problema teórico e experimental
amplo e em aberto e para aos autores, estudos nesta área são de grande
relevância para aplicações.
Os resultados deste trabalho podem auxiliar no desenvolvimento de
estratégias de controle mais precisas e por consequência, na melhoria da
qualidade dos processos além de contribuir para a robotização de baixo custo
nas mais diversas aplicações, como a marcenaria e a usinagem.
A seguir são apresentados alguns termos, conceitos e especificidades
relacionados mais diretamente com o trabalho, justificando a importância da
modelagem matemática da não linearidade da folga nos sistemas mecânicos.
Para isso se fará uma breve contextualização histórica, seguida dos objetivos
desta
dissertação,
explanando
suas
particularidades,
contribuições
e
aplicações.
1.1
Generalidades
Historicamente os robôs surgem na perspectiva de, segundo, auxiliar os
seres humanos em atividades repetitivas, insalubres e de grande esforço físico
(GOMES, 2000). Ao mesmo tempo, diversos sistemas robóticos, em especial
os de pórtico, se tornaram mais complexos e mais caros (PO-NAGEN, 2009, p.
1588). Segundo a ISO 10218 (1992) apud Romano (2002), um robô é uma
máquina manipuladora de base fixa ou não, multifuncional de fácil
programação
e
reprogramação,
controlada
automaticamente
sendo
amplamente utilizado na indústria pela boa relação entre produtividade e
manutenção além de alta precisão.
Para Romano (2002), os robôs industriais se caracterizam pela
integração entre os mecanismos mecânicos, atuadores, sensores, unidade de
controle e de potência e efetuador. O processo de desenvolvimento contínuo
de sistemas robóticos melhorou a funcionalidade e adaptabilidade dos robôs de
pórtico no exigente ambiente de automação industrial, fazendo com que os
robôs Gantry fossem empregados em distintas áreas para a execução de
diversas funções, das quais se destacam guincho robô, máquinas de corte
19
laser e usinagem CNC. Segundo Shang e Cong (2014) as principais vantagens
são:
produtividade (conseguem fazer mais, e em menos tempo a sua função);
qualidade (conseguem efetuar diversas tarefas repetidas vezes com
mesmo grau de precisão);
segurança (desempenham funções insalubres e perigosas.);
adaptável (flexibilidade funcional podendo ser facilmente reprogramados
para as tarefas necessárias).
a crescente preocupação das pesquisas com os robôs do tipo Gantry,
preocupando-se especialmente com o desenvolvimento de estratégias de
controle de alta precisão e em alta velocidade, o que, aliado as grandes forças
que o manipulador paralelo deste tipo pode transladar, se torna muito difícil
(SHANG e CONG, 2014). Os robôs do tipo Gantry são os mais robustos e
possuem uma cinemática mais simples por se utilizar juntas prismáticas, com
eixos perpendiculares, sendo muito aplicados pela facilidade de programação
(PAATZ, 2008). A escolha da transmissão depende da potência e do tipo de
movimento do robô, podendo variar das engrenagens até correias e cabos. O
acionamento de tais transmissões se dá através de sistemas pneumáticos,
hidráulicos e/ou elétricos.
Apresenta-se na seção a seguir, a descrição da transmissão mecânica
adotada (fuso de esferas) nesta pesquisa, bem como outras especificidades
desta dissertação, tais como a utilização de inversores de frequência, motor de
corrente alternada e redutor (aos quais irão denominar-se apenas motorredutor
CA) e acoplamento elástico.
1.2
Particularidades
Trata-se, neste trabalho, do problema das não linearidades de atrito
(friction) e folga (backlash) nas transmissões mecânicas do tipo fuso de esferas
com acionamento elétrico por motor de corrente alternada trifásico em robôs do
tipo Gantry, considerando-se como entrada do sistema o torque motor
.
Os manipuladores robóticos são compostos pela integração dos
mecanismos (braço, punho, efetuador final), dos acionamentos (atuadores e
transmissões) e dos sistemas de controle (softwares, hardwares, sensores e
20
unidades de controle). As transmissões correspondem a forma pela qual o
acionamento (seja atuador pneumático, hidráulico ou elétrico ou ainda suas
combinações) irá aplicar no mecanismo o torque ou as forças necessárias ao
movimento a ser desempenhado.
Para Valdiero (2012), o mecanismo é a parte mecânica que executa o
movimento, onde o punho é um conjunto de juntas do robô antes da
garra/ferramenta/efetuador final enquanto o braço corresponde ao conjunto de
juntas (conexão entre as partes móveis) e elos (conexão entre as juntas) do
robô.
De acordo com Zhang et al. (2013), as juntas cinemáticas do sistema de
alimentação de máquina-ferramenta são cruciais para a modelagem dinâmica.
Elas afetam as características dinâmicas do sistema de alimentação da
máquina-ferramenta o que influenciará significativamente na qualidade do
produto final. As juntas robóticas fazem parte do mecanismo do robô e podem
ser rotativas ou prismáticas. As juntas prismáticas transladam linearmente ao
longo de guias, enquanto as juntas rotativas giram em torno de uma linha
imaginária (chamado de eixo de rotação). Há ainda juntas que podem combinar
estas características (como as esféricas e as cilíndricas).
A escolha da transmissão em sistemas robóticos está atrelada ao tipo de
tarefa que será desempenhada. Nos robôs do tipo Gantry, onde as juntas são
prismáticas e perpendiculares, são muito utilizadas as transmissões do tipo
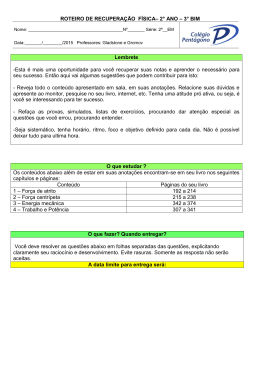
fuso e porca/castanha (parafuso de potência), Figura 1, as quais apresentam
vantagens, segundo Shimada et al. (2013) de estabilidade, eficiência, precisão,
durabilidade, velocidade e custo mas desvantagens, de acordo com
Hanifzadegan e Nagamune (2015), especialmente relacionadas as variações
dinâmicas e vibrações.
21
Figura 1 - Fuso de Esferas : (a) Adotada na Bancada Experimental; (b)
Desenho Esquemático e Principais Componentes – (1) Fuso, (2) Castanha, (3)
Flange, (4) Esferas
Fonte: próprio autor.
A castanha translada sobre o eixo fuso a partir de deslocamentos
angulares provocados pelos torques aplicados pelo motorredutor CA no eixo
fuso, os quais estão ligados por um acoplamento elástico.
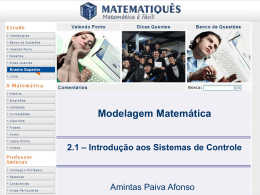
A utilização de acoplamentos elásticos entre o eixo usinado para o
motorredutor CA e a barra do fuso, se deve ao fato não ser possível montar
sob uma mesmo linha o motorredutor CA e a guia do fuso de esferas. O
acoplamento utilizado permite desalinhamentos, sendo torcionalmente elástico
e flexível, absorvendo as vibrações choques e desalinhamentos radiais, axiais
e angulares conforme apresentado na Figura 2.
Figura 2 - Desalinhamentos do Acoplamento Elástico
Fonte: ACRIFLEX, [20 - -?].
22
Outro fator decisivo é a escolha do acionamento. Eles devem contemplar
a necessidade do projeto (adequado a cada utilidade do robô), custos iniciais e
de manutenção. A indústria, de modo geral, utiliza-se de três tipos de
acionamento e de suas combinações: pneumáticos, hidráulicos e elétricos.
Sistemas pneumáticos
e
hidráulicos exibem vantagens
especialmente
relacionadas à boa relação peso/potência e as partidas e paradas rápidas além
de, no caso da pneumática, utilizar-se de um fluído de potência limpo (ar). As
desvantagens estão especialmente relacionadas ao alto custo, perdas de
potência por vazamentos e/ou dissipação por atrito viscoso além de elevada
dependência da temperatura (VON-LINSINGEN, 2003).
Os motores elétricos trifásicos, de acordo com Trevisan (2010) estão
presentes em todos os processos industriais, e, por serem relativamente novos,
segundo Brito, Lamim Filho e Brito (2013), os motores de acionamento trifásico
de corrente alternada, ainda são pouco conhecidos suas técnicas preditivas e a
utilização combinada com os inversores de frequência.
Nos sistemas acionados por motores elétricos as vantagens, de acordo
com Garcia-Valdovinos e Parra-Vega (2003), são a baixa variância da
velocidade (apesar de baixa, este fator dificultou muito a utilização dos motores
de corrente alternada em detrimento aos de corrente contínua mesmo que
estes sejam mais caros e exijam maior manutenção e cuidado), alta corrente
de partida, eficiência do processo, tempos de ciclo mais curtos (melhor
resposta dinâmica) e menor manutenção tendo como principais desvantagens
o elevado custo e partidas e paradas lentas (causadas pelas rampas de
aceleração e desaceleração do motor).
A grande maioria destes problemas foi corrigido através de eletrônica
própria e em especial pelo desenvolvimento dos inversores de frequência, que
correspondem a equipamentos que convertem a corrente alternada da rede de
frequência fixa em frequência variável. Os inversores de frequência aliados à
melhoria nos motorredutores CA proporcionaram grande economia de energia,
dada sua melhor utilização, e por consequência direta a melhoria no processo
(desempenho de máquinas, devido à adaptação da velocidade de processar os
requisitos) e nos custos da produção, além da eliminação da corrente de pico
inicial e a redução da manutenção de equipamentos (AMIRABADI et al.,2014).
A utilização de acionamentos elétricos não é único problema no
emprego de robôs, outros fatores podem afetar negativamente os quais estão
23
especialmente ligados a questões mecânicas (como transmissões) e físicas
(como o atrito e a folga). Tais fatores são, em geral, não linearidades que
podem ser descritas e analisadas matematicamente através de modelos, de
forma a compreender e melhorar processos.
1.3
Revisão Bibliográfica
O estudo de diferentes transmissões e acionamentos, além da utilização
de modelos matemáticos para descrever, analisar e compensar não
linearidades em sistemas mecânicos, em especial na robótica, vem sendo um
espaço de grande número de pesquisas preocupadas especialmente no
desenvolvimento do controle preciso de robôs em suas diversas aplicações e a
melhoria de processos tendo por consequência o aumento na segurança e
redução dos custos.
Como antecedentes do grupo de pesquisa no mestrado em Modelagem
Matemática, foram desenvolvidas pesquisas de não linearidades (com foco
especial nos acionamentos pneumáticos), tais como em Bavaresco (2007), que
estudou as não linearidades e o controle de posição em robôs cartesianos com
acionamento pneumático e diversas dissertações (MIOTTO, 2009; RITTER,
2010; PÖRSCH 2012; SANTOS, 2014; VIECELLI 2014) que estudaram a
dinâmica do atrito. Padoin (2011) apresentou a modelagem da transmissão por
engrenagens com a não linearidade da folga em acionamento por motores
elétricos. Em especial, Menuzzi (2011) tratou da modelagem da não linearidade
da folga em transmissões do tipo parafuso de potência (fuso-porca) acionado
por motor de corrente contínua.
Na literatura internacional, pode-se destacar as recentes pesquisas de
Douat (2014), Kermorgant e Chaumette (2014) e Bebek, Joong e Çavuşoğlu
(2013) sobre o controle de manipuladores robóticos cartesianos; Zhu e
Fujimoto (2013), Grami e Gharbia (2013), Shen et al. (2014) e Lin, Yau e Tian
(2013) sobre a não linearidade do atrito; Phunong (2014), Hanifzadegan e
Nagamune (2015), Zhang et al. (2013) e Shimada et al. (2013) que tratam da
transmissão por fuso de esferas; Wang et al. (2014), Chevallerau et al. (2014),
Almeida et al. (2010), Reis et al. (2012), Brito, Lamim Filho e Brito (2013),
Amirabadi et al. (2014) além de Tanaka et al. (2013)
e Voldán (2012) na
utilização de motores elétricos; Nordin e Gutman (2000), Dwivedula e Pagilla
24
(2013) bem como Durdevic e Yang (2013) e Yang, Yan e Han (2015) que
estudaram a não linearidade da folga. Estas pesquisas apontam a relevância
deste estudo bem como a abordagem constante destes temas na literatura
internacional.
Douat (2014) apresentou maneiras de aumentar a precisão em robôs
paralelos com dois graus de liberdade através de sensores. Kermorgant e
Chaumette (2014) apresentam um controle para um robô multi-sensor sob
várias restrições. Bebek, Joong e Çavuşoğlu (2013) usaram um robô paralelo
com cinco graus de liberdade para a realização de intervenções de base
agulha em pequenos animais.
Lin, Yau e Tian (2013) investigaram formas de melhorar a precisão de
um motor na aplicação de robôs lineares afirmando que a precisão em motores
lineares está limitada pela ação de dois fenômenos não lineares em especial:
ondulações e atrito. As ondulações surgem nas estruturas magnéticas e
causam problemas no controle de posição. O atrito por sua vez, surge na
interação entre superfícies e gera erros, oscilações e ciclos infinitos no
movimento, afetando diretamente a precisão do controle. Os autores destacam
ainda que a combinação das características do atrito (estático, viscosa,
Coulomb e Stribeck), como no modelo LuGre, é muito utilizada quando não se
requer precisão na ordem de micro ou nano metro. Segundo os autores, o
modelo Lugre é o mais utilizado nas investigações por não separar os
comportamentos, mas apontam que há outros modelos que contemplam outras
características, mas que, apesar da complexidade das equações, todas
possuem boa relação com os resultados experimentais. Zhu e Fujimoto (2013)
provaram que o atrito pode ser devidamente compensado pelo movimento,
tanto o movimento de reversão quanto de inversão não linear. Grami e Gharbia
(2013) estudaram a compensação de atrito em um robô manipulador planar
com dois graus de liberdade. Além de Shen et al. (2014), que estudou diversos
modelos de compensação de atrito e desenvolveu um modelo que permite a
utilização de controladores de deslocamento para a compensação dos erros.
Shimada et al. (2013) desenvolveram um modelo para detecção de contato no
fuso de esferas que tem características de atrito não linear complexas.
Para Phunong (2014), os fusos de esferas são amplamente utilizados
hoje nas aplicações em máquinas ferramentas, robôs, equipamentos militares,
médicos, de montagem de precisão, além de serem amplamente aplicados em
25
diversos setores nas indústrias de aviões e automóveis, uma vez que são
econômicos, confiáveis e eficientes mecanismos de criação dadas suas
características de alta capacidade de carga, longa vida, alta rigidez, facilidade
de transporte, e segurança em altas velocidades. No entanto os sistemas que
se utilizam desta transmissão são afetados pela não linearidade do atrito
devido ao contato entre as superfícies e imperfeições mecânicas. O atrito é
geralmente descrito como a resistência ao movimento de duas superfícies em
contato e é um dos maiores desafios nos sistemas de controle de alta precisão,
podendo deteriorar o desempenho e prejudicar o movimento. Se pode, através
de modelagem própria, compensá-lo de modo a minimizar sua influência no
sistema.
Hanifzadegan e Nagamune (2015) desenvolveram um controle para o
acionamento através de fuso de esferas. Zhang et al. (2013) discorreu sobre os
efeitos do acionamento para a máquina concluindo que eles são cruciais para a
modelagem dinâmica por afetar as características dinâmicas do sistema de
alimentação
da
máquina-ferramenta
o
que
depois
influenciará
significativamente na qualidade final.
Almeida et al. (2010) utilizam o método do escorregamento e a análise
espectral do sinal de corrente do estator para desenvolver um equipamento
inteligente para medir indiretamente o torque de motores trifásicos. Reis et al.
(2012) apresentam testes de máquinas rotativas através da variação da
velocidade e torque de um motor elétrico. Para o controle do motor é utilizado
um inversor de frequência comercial realimentado por um controlado PI
(Proporcional-Integral) que recebe dados adquiridos dos sensores de
deslocamento angular (encoders) e de torque. Já Brito, Lamim Filho e Brito
(2013) ressaltam que apesar de novos, os acionamentos por motor trifásico de
corrente alternada já são amplamente utilizados na indústria. Eles apresentam
um estudo e caracterização de falhas nos motores alimentados por inversores
de frequência através da análise de vibrações. A conclusão mais importante
para este trabalho é o fato de que a utilização de inversores de frequência não
influencia diretamente na curva de torque do motor. De acordo com Amirabadi
et al. (2014) a eletrônica de potência e em especial os inversores de frequência
são parte do sistema de distribuição de energia convertendo a eletricidade em
formas úteis e compatíveis. No trabalho, os autores apresentam o
26
desenvolvimento de um inversor que se atenda melhor a realidade da energia
fotovoltaica.
Para Tanaka et al. (2013), os motores elétricos de corrente alternada
(CA) ou corrente contínua (CC) apresentam alto desempenho com torques
elevados e baixos momentos de inércia. Motores elétricos de corrente
alternada ou contínua, são geralmente ligados a reduções de engrenagens o
que afeta a relação torque-inércia. Os autores concluíram ainda que a potência
e o torque são quase proporcionais à massa do motor e o momento de inércia
respectivamente. Por fim, Voldán (2012) afirma que a estimação do torque
pode ser realizada por diversas técnicas que variam não só a sistemática mas
também em custo e complexidade, devendo ser escolhida de acordo com a
necessidade. No caso de motores elétricos é muito mais difícil e, portanto, de
maior custo.
Wang et al. (2014) propõe um controle para motores de corrente
alternada. Chevallerau et al. (2014) apresentam uma primeira tentativa de
controlar um grupo de veículos submarinos rígidos não-holonômicos fazendoos navegar de forma cooperativa. Para isso utilizaram requisitos de
convergência da lei de controle e controle de corrente elétrica.
Segundo Nordin e Gutman (2000) o controle de sistemas com folga tem
sido estudado desde 1940, haja vista que evidentemente, sistemas que exibem
folga são muito complicados, especialmente quando se deseja alta precisão.
Há casos em que o motor perde contato com a carga, podendo-se afirmar que
nestes casos a carga está incontrolável, mas a dinâmica pode ser controlada.
Os sistemas que exibem folga apresentam frequentemente erros no estado
estável, ou limitações nos sistemas que oscilam. Em seu estudo os autores
apresentam um histórico dos modelos utilizados para descrever, analisar e
compensar a folga.
Dwivedula e Pagilla (2013) estudaram modelos que descrevem a folga
em transmissões por engrenagens. Durdevic e Yang (2013) investigam o
controle híbrido para um robô com folga nas transmissões. Yang, Yan e Han
(2015) destacam que a folga é a principal fonte de erro de posicionamento e
impactos e que sua minimização/compensação é a maneira mais eficaz de
melhorar a precisão de posicionamento e evitar o impacto. Eles ressaltam
ainda que apesar das mais diversas aplicações de robôs (como na medicina e
na indústria), os modelos que descrevem as suas dinâmicas ainda não
27
possuem a acurácia necessária o que afeta diretamente a precisão de suas
funções. O redutor é um dos principais componentes de transmissão e afeta
diretamente as propriedades dinâmicas. No entanto, o conjunto motor-redutor
possui difícil modelagem e controle especialmente em condições de baixas
velocidades (como neste trabalho), dada uma rigidez muito maior. Em
contraste com outros parâmetros mecânicos como o momento de inércia, a
folga depende do desgaste, do desalinhamento da montagem e outros fatores
não controláveis (como o processo de fabricação).
Outras referências bibliográficas (VUKOBRATOVIĆ e POTKONJAK,
1985; SLOTINE e LI, 1991; SCIAVICCO e SICILIANO, 1996; NOF, 1999; TSAI,
1999; DAVIDSON e HUNT, 2004) fundamentam os aspectos teóricos desta
dissertação.
Os trabalhos apresentados anteriormente trataram do estudo de
especificidades das características construtivas e apresentam relevância. Esta
dissertação traz contribuições à medida que alia diversas características
construtivas (utilização de motorredutores de corrente alternada, inversores de
frequência, fuso de esferas, acoplamento elástico e sensores de deslocamento
angular e linear) e busca identificar características que são convencionadas
(como o atrito) ou mesmo desprezadas (como a folga) na modelagem e no
desenvolvimento de estratégias de controle. Além disso, caracteriza-se
enquanto uma abordagem teórica-experimental do estudo das não linearidades
apresentando uma metodologia para a identificação, onde os dados capturados
são validados experimentalmente.
1.4
Objetivos, Metodologia e Organização do Trabalho
Esta dissertação tem por objetivo desenvolver e validar a modelagem
matemática da dinâmica de uma transmissão mecânica com acionamento
elétrico de um protótipo de robô do tipo Gantry para uma entrada em torque
motor
, incluindo-se o efeito das não linearidades presentes. Para isso,
elencam-se de forma mais específica os seguintes objetivos:
Identificar as principais características não lineares e determinar os
parâmetros cinemáticos do robô;
Formular um modelo matemático que descreva as não linearidades
presentes;
28
Simular computacionalmente o modelo, analisando as características do
modelo;
Construir uma bancada de testes experimentais do tipo Gantry com
acionamento elétrico e transmissão mecânica por fuso de esferas e
acoplamento elástico, descrevendo os seus principais componentes e
características;
Validar experimentalmente o modelo proposto através de uma bancada
de testes;
Para a construção da bancada experimental utilizou-se da estrutura
tecnológica e de recursos humanos disponíveis no Núcleo de Inovação em
Máquinas Automáticas e Servo Sistemas (NIMASS, credenciado pela Agência
Nacional de Petróleo _ ANP em 13 de outubro de 2014, portaria no. 1.542 do
D.O.U) da Unijuí Câmpus Panambi, bem como dos demais Laboratórios
vinculados e da Biblioteca. O NIMASS foi implantado com recursos financeiros
do FINEP/SEBRAE/MCT e modernizado com apoio de um projeto no âmbito do
Programa de P&D da ANEEL). Esta pesquisa tem ainda o apoio de bolsas de
iniciação científica da Fundação de Amparo à Pesquisa do Rio Grande do Sul
(FAPERGS) e do Conselho Nacional de Desenvolvimento Científico e
Tecnológico (CNPq), bem como da Coordenação de Aperfeiçoamento de
Pessoal de Nível Superior (CAPES). Da CAPES, provém também auxílio
financeiro através de bolsa integral de mestrado.
Com base nos objetivos, esta pesquisa se classifica enquanto pesquisa
descritiva e exploratória e em relação ao seu modelo conceitual e operativo
enquanto bibliográfica e experimental. Os dados serão obtidos de forma direta
extensiva com categorias emergentes e serão analisados quantitativa e
qualitativamente, tomando como base a revisão de literatura e a prática
experimental.
Os modelos matemáticos serão desenvolvidos a partir da identificação
experimental das não linearidades e das leis físicas que descrevem a dinâmica
dos componentes estudados. As simulações serão realizadas através da
ferramenta de prototipagem matemática MatLab® e em especial da plataforma
Simulink do MatLab. O robô será conectado a uma placa alemã dSPACE DS
1104, integrada a um microcomputador. A placa dSPACE é responsável pela
29
aquisição e controle de sinais do sistema, e possui interface com o
Simulink/MatLab através do ControlDesk.
Esta dissertação está organizada em quatro capítulos. O capítulo 2
descreve a bancada experimental do protótipo de um robô Gantry construído. A
modelagem matemática da junta, das não linearidades e da cinemática é
apresentada no capítulo 3. Os resultados estão apresentados no capítulo 4.
Por fim, têm-se as conclusões e as perspectivas para a continuidade desta
pesquisa, as referências utilizadas e os apêndices.
30
2 Descrição da Bancada Experimental
A
bancada
experimental
de
testes
é
composta
por
mecanismo,
acionamento e sistema de controle (conforme a Figura 3) a qual permite
realizar experimentos para a validação dos modelos matemáticos estudados.
Figura 3 - Projeto do Robô Gantry
Controle
Acionamento
1
dSPACE
6 Inversor de Frequência
2
Microcomputador
7
Caixa de Comando
3
Fonte de Alimentação
8
Motorredutor CA
4 Transdutor de Deslocamento 9
Castanhas de Esferas
5
Endoder
10 Acoplamento Elástico
11
Eixo Fuso
12
Eixo Liso
Fonte: próprio autor.
Mecanismo
13
Elos
14 Juntas
15 Bancada
31
A estrutura cartesiana implica em deslocamentos lineares (dada que é
uma junta prismática) de um elo em relação ao anterior, ou seja, do segundo
grau de liberdade sob o primeiro grau (constituídos da mesma forma e com os
mesmos componentes). Para a construção e a validação foi construído apenas
o primeiro grau de liberdade do robô Gantry sendo os componentes deste
detalhadamente descritos nas seções seguintes.
2.1
Mecanismo
O manipulador robótico adotado é do tipo Gantry, projetado com dois
graus de liberdade (sendo modeladas e construídas apenas uma) e juntas
prismáticas do tipo fuso de esferas, as quais transformam rotações em
translações a partir dos torques aplicados por motorredutores CA ligados a
inversores de frequência, os quais são controlados através de softwares e
hardwares de comando e aquisição de dados. A Figura 4 apresenta o projeto
do robô construído.
Figura 4 - Componentes do Mecanismo do Robô Gantry
Fonte: próprio autor.
O robô está montado em uma estrutura de cantoneiras (base
fixa/bancada), de modo que, para transladar, o robô utiliza-se uma guia lisa
(eixo liso) e uma roscada (eixo fuso), por onde, através de castanhas de
32
esferas, ocorrem os deslocamentos da massa a elas acopladas. Estas guias
compõe as juntas do robô, enquanto as castanhas e as massas a ela
acopladas constituem os elos. Este robô está instalado no Núcleo de Inovação
em Máquinas Automáticas e Servo Sistemas (NIMASS) no Câmpus Panambi
da Unijuí, conforme apresentado na Figura 5 a seguir.
Figura 5 – Fotografia do Protótipo do Robô Gantry
Fonte: próprio autor.
Buscou-se também, fazer uso da convenção de Denavit-Hartenberg (DH) na modelagem da cinemática direta do robô. Tal convenção será melhor
descrita na seção 3.9 e utiliza parâmetros que dependem da construção do
robô e das características do mecanismo.
2.2
Acionamento
Os componentes do sistema de acionamento estão apresentados na
Figura 6. A partir da rede elétrica (fonte de potência), após operação pelo
sistema de controle, a alimentação de energia elétrica vai para o motor de
corrente alternada – CA – (5) onde é convertida em energia mecânica. A
energia mecânica é transmitida por um redutor de engrenagens (4) conectado
no fuso (2) por meio de um acoplamento elástico (3) que permite
desalinhamentos entre o eixo de saída do redutor e o eixo movido do fuso. O
33
torque motor da saída do redutor é transmitido para um fuso (2), onde a
castanha de esferas (1) se desloca. Paralelamente, existe uma guia lisa (6)
com esferas (7) que tem a função de junta prismática passiva. A potência
fornecida pela concessionária é na forma de corrente alternada com tensão de
220V. Tal potência foi medida em cada teste para cada entrada de comando no
inversor de frequência.
Figura 6 - Componentes do Sistema de Acionamento
Fonte: próprio autor.
As especificações técnicas do motor CA e seu respectivo redutor
encontram-se descritas na Tabela 1.
Tabela 1 - Características do Motor CA e do Redutor de Engrenagens
Componente
Código
Fabricante
Motor CA
IP56-60Hz-4
Polos
NOVA
Redutor de
Engrenagens
W63-U-24P80B14-B3
ATI Brasil
Fonte: próprio autor.
Principais Características
Trifásico Blindado; Rotação: 1730
rpm (181,1651 rad/s); Potência: 750
W; Rendimento: 74% (se utilizada
50% da potência), 78,4% (se
utilizada 75% da potência) e 80,5%
(se utilizada 100%).
Relação de Redução: 24x;
Rendimento dinâmico: 78%.
34
O fuso e a castanha de esferas (junta prismática ativa) e a junta
prismática passiva (eixo liso com esferas), bem como o acoplamento elástico,
que foram apresentados na Figura 1, estão descritos na Tabela 2.
Tabela 2 - Características dos Eixos, Castanhas e Acoplamento Elástico
Componente
Código
Fabricante
Eixo Fuso
Roscado
SFUR-2510-T4N
Kalatec
Castanha de
Esferas para o
Eixo Roscado
SFU02510-4
Kalatec
Eixo Liso
SF25 2500
Kalatec
Castanha de
Esferas para o
Eixo Liso
LM25UU
Kalatec
Acoplamento
Elástico
10.11-AZ02
Acriflex
Principais Características
Diâmetro: 25 mm (0,025m); Passo:
10 mm (0,01m); Capacidade carga
dinâmica: 100 kg; Passo: 10 mm
(0,01m); Curso total: 1265mm
(1,265m).
Diâmetro: 25 mm (0,025m);
Capacidade carga dinâmica: 2954
kg;
Diâmetro: 25 mm (0,025m);
Capacidade carga dinâmica: 100
kg; Curso total: 1200mm.(1,2m)
Diâmetro: 25 mm (0,025m);
Capacidade carga dinâmica: 100
kg;
Desalinhamentos Axial: 0,8 mm
(0,0008m); Desalinhamentos
Radial: 0,2 mm (0,0002m);
Desalinhamentos Angular: 1°
(0,0174532925 rad).
Fonte: próprio autor.
2.3
Sistema de Controle e Instrumentação
O microcomputador que realiza a interface entre o usuário e o robô,
utiliza-se de uma placa de aquisição e controle dS1104 (1) a qual estabelece
relação com o software Matlab/Simulink através do software ControlDesk, de
modo a capturar e controlar os dados. Esta plataforma se utiliza da construção
gráfica dos elementos em janelas e gráficos (2) para exibir, salvar e alterar em
tempo real as informações. A Figura 7 apresenta a dSPACE 1104 e a tela do
ControlDesk. Em se tratando da parte de hardware a placa comporta dezesseis
entradas: oito entradas de conversão analógico-digital (ADC – Analogic Digital
Converter) e oito entradas de conversão digital-analógica (DAC – Digital
Analogic Converter). Nestas entradas são conectados os cabos dos sensores
de rotação (encoders) e de deslocamento (transdutores).
35
Figura 7 – Parte do Sistema de Controle: (1) dSPACE 1104; (2) Tela do
ControlDesk
Fonte: próprio autor.
A alimentação em corrente contínua dos sensores e da placa é
controlada através de uma fonte HP de 24 VDC (Voltage Direct Current –
Tensão Corrente Contínua) conforme a Figura 8.
Figura 8 - Fonte de Alimentação HP 6543A
Fonte: próprio autor.
Esta fonte de alimentação não permite que tensões e correntes além das
programadas (24V e 1A) passem e acabem danificando os componentes da
instrumentação. Suas especificações técnicas estão descritas na Tabela 3.
36
Tabela 3 - Especificações da Fonte de Alimentação HP
Componente
Código
Fabricante
Fonte HP
6543A
Agilent Power
(for HP)
Principais Características
Corrente Contínua;
Voltagem de saída:0-35V;
Corrente de saída: 0-6A;
Corrente máxima: 5,4A;
Precisão 15mV e 6,7mA.
Fonte: próprio autor.
Segundo Contreras, Flores e Silva (2008), os encoders incrementais são
amplamente utilizados nas mais diversas aplicações robóticas e no controle
realimentado de sistemas. Eles são transdutores rotativos eletromecânicos
onde um emissor envia feixes de luz através de duas fendas defasadas e uma
terceira (conta giros) que são recebidas e interpretadas por uma placa
eletrônica. Esta placa transforma o conjunto de feixes de luz em uma série de
pulsos que são interpretadas como o movimento angular (em deslocamento e
sentido) por uma placa de aquisição e controle. Apresenta-se na Figura 9 a
forma constitutiva do encoder incremental utilizado.
Figura 9 - Encoder Incremental com Destaque ao Disco Codificado Defasado
Fonte: próprio autor.
No transdutor de deslocamento linear e sem contato se encontram as
guias de onda protegidas pelo perfil de alumínio: o ponto de medição ao longo
do elemento sensível (guia da onda) é indicado por um elemento passivo
(posicionador - ímã), que não necessita de alimentação. Ao longo do transdutor
de deslocamento se movimenta um sensor de posição que é acoplado ao robô
37
através de um ímã para determinar a posição. A posição é medida através da
guia de ondas que captura pulsos eletromagnéticos dentro da faixa de medição
indicada na Figura 10.
Figura 10 - Transdutor de Deslocamento Sem Contato: (a) Faixa de Medição;
(b) Desenho do Sensor
Fonte: BALLUFF, [20 - -?].
Tais sensores de deslocamento (transdutores - (1)) e de deslocamento
angular (encoders - (2) e (3)) são apresentados na Figura 11 a seguir.
Figura 11 - Encoders e Transdutor
Fonte: próprio autor.
38
Estes sensores enviam os sinais de rotação e deslocamento através de
pulsos que são recebidos e interpretados na dSPACE e capturados através do
ControlDesk. As características do encoder incremental e do transdutor de
deslocamento estão descritas na Tabela 4.
Tabela 4 - Características do Encoder Incremental e Transdutor de
Deslocamento Linear
Componente
Código
Fabricante
Encoder
Incremental
7510-0622-1000
Hohner
Transdutor de
Deslocamento
Linear Micropulso
Sem Contato
BTL6-A110-M0500-A1S115
Balluff
Principais Características
Pulsos: 1000 ppr (pulsos
por rotação); Precisão:
0,09° (0,0015 rad);
Alimentação: 24V.
Faixa de Medição: 500 mm;
Saída analógica de 0-10V;
Precisão da repetição
≤10μm.
Fonte: próprio autor.
Aliado aos sensores e a placa de aquisição e controle, há um sistema
apresentado na Figura 12 composto por: um inversor de frequência (2), um
disjuntor (3), uma caixa de comandos manuais (1) e uma placa eletrônica. Este
sistema está ligado na rede, onde se pode medir tensão, corrente (voltímetro
(4) e amperímetro (6), respectivamente) e potência (a partir de wattímetro (5)).
Figura 12 - Parte do Sistema de Controle: (a) Inversor de Frequência, Caixa de
Comando e Disjuntor; (b) Multímetros e Wattímetro
Fonte: próprio autor.
A conexão dos dois multímetros (que assumem a função de voltímetro –
medidor de tensão e amperímetro – medidor de corrente) e do wattímetro –
medidor de potência, foram feitas conforme apresentado no diagrama da
39
Figura 13 seguindo as normas dos fabricantes e utilizando as pontas de prova
no wattímetro e voltímetro e a garra.no amperímetro.
Figura 13 - Conexão da Instrumentação
Fonte: próprio autor.
As características técnicas dos modelos de multímetro e wattímetro
utilizados estão descritas na Tabela 5.
Tabela 5 - Características da Instrumentação Utilizada
Componente
Código
Fabricante
Wattímetro
G007497
EBERLE
Alicate Multímetro
Digital
ET-3111
MINIPA
Principais Características
VCA/VCC 200V; Watt: até 10A; V:
1000VCC/750VCA.
Tempo de Amostragem: 3 vezes por
segundo; Faixa de medição: até 1000A
(corrente AC), até 750V (tensão AC),
até 1000V (tensão DC), até 20MΩ
(resistência).
Fonte: próprio autor.
Os disjuntores permitem manualmente a passagem da corrente alternada da
rede de modo que, através do inversor de frequência ou da caixa de comando
se possa controlar as partidas/paradas, a inversão de movimentos – sentido do
deslocamento angular, e velocidade, diretamente na caixa de comandos
(através de um potenciômetro e/ou botões). Este controle manual está
apresentado na Figura 14 com as posições do potenciômetro destacadas na
40
Figura 15. Estas posições definem as potências fornecidas ao
motorredutor CA para a realização dos testes experimentais.
Figura 14 - Caixa de Comandos: (1) Liga/Desliga Geral; (2) Sentido do
Deslocamento Angular – Desliga/Negativo e Liga/Positivo; (3) Comando –
Liga/Caixa de Comando e Desliga/Inversor de Frequência; (4) Gira/Pára
Fonte: próprio autor.
Figura 15 - Marcações das Posições dos Intervalos no Potenciômetro
Fonte: próprio autor.
41
Pode-se optar pelo comando através da caixa de comando ou do
inversor de frequência CFW10 (haja vista que esta caixa de comandos está
ligada diretamente ao inversor de frequência), o qual possui conexão com o
motorredutor CA conforme descreve a figura Figura 16.
Figura 16 – Conexões de Potência do Inversor de Frequência
Fonte: WEG, [20 - -?].
O diagrama da Figura 17 indica o funcionamento do Inversor e a Tabela
6 contém as características do inversor utilizado.
Tabela 6 - Descrição do Inversor de Frequência
Componente
Inversor de
Frequência
Código
CFW10-0040-S2024PSZ
Fonte: próprio autor.
Fabricante
WEG
Principais Características
Monofásico; Corrente
Nominal de Saída: 4A.
42
Figura 17- Diagrama de Blocos do Inversor de Frequência CFW 10
Fonte: WEG, [20 - -?].
Esta caixa de comando é composta por quatro botões e um
potenciômetro e, inicialmente, permitiu o controle das necessidades descritas
(ligar/desligar e sentido de giro) estando conectada nas linhas de comando do
inversor (podendo optar entre o comando através da caixa ou do inversor)
descritas na Figura 18. Estas linhas de comando também seguiam para a
placa de aquisição e controle.
43
Figura 18 - Descrição da Conexão de Controle do CFW 10
Fonte: WEG, [20 - -?].
Posteriormente, esta caixa de comando pôde ser substituída por uma
única placa eletrônica que permitia também a interface direta entre a placa
dSPACE e os inversores de frequência que controlam o motorredutor CA.
Para isso, a dSPACE trabalha com uma faixa de
Necessita-se que ao enviar o valor de
a
.
o motor pare. Quando se enviar um
sinal positivo o motor deve girar no sentido horário e quando enviar um sinal
negativo no sentido anti-horário. E ainda, quando se enviar
, por exemplo, o
motor deve girar a uma velocidade correspondente, quando alterar para
, ele
deve aumentar a velocidade no mesmo sentido do deslocamento angular.
Agora, quando enviar
, por exemplo, se quer que o motor pare, inverta o
sentido do deslocamento angular, e comece a girar sob uma velocidade
correspondente a
. Da mesma forma, se alterar o comando para
, se
quer que o motor gire no mesmo sentido mas em uma velocidade menor.
Lembra-se que seria necessário existir uma “zona morta elétrica” sendo
necessário, portanto, uma pequena faixa próxima aos
para livrar a
interferência de ruídos ou liga/desliga muito rápidos. O esquema da Figura 19
ilustra esta configuração.
44
Figura 19 - Diagrama de Funcionamento da Placa Eletrônica
Fonte: próprio autor.
Ou seja, ao inverter o sentido do deslocamento angular, se quer: parar o
movimento, inverter o sentido do deslocamento angular e girar novamente. O
projeto da placa eletrônica está apresentado no Apêndice A.
45
3 Modelagem Matemática
3.1
Introdução
Dentre as mais diversas aplicações da matemática, cabe destaque para
as engenharias que através de modelos matemáticos obtém grandes avanços,
especialmente por tornar-se um método científico e uma estratégia de ensinoaprendizagem. “A modelagem matemática consiste na arte de transformar
problemas da realidade em problemas matemáticos e resolvê-los interpretando
suas soluções na linguagem do mundo real” (BASSANEZI, 2006, p. 16).
Assim, a modelagem matemática é uma tarefa implícita ao pesquisador
da matemática aplicada, por estar intimamente ligada como os fenômenos
físicos (nas suas mais diversas formas, como os mecânicos neste caso).
Apresentam-se neste capítulo os modelos utilizados para cada
característica estudada, bem como as hipóteses consideradas para a
modelagem. Na seção 3.3 apresenta-se a modelagem matemática do fuso de
esferas. Na seção 3.4 apresenta-se a modelagem dinâmica da castanha. Na
seção 3.5. está descrito o modelo dinâmico da junta sem folga, enquanto na
seção 3.6 se expõe a modelagem do atrito dinâmico. Na seção 3.7 é
apresentada a modelagem dinâmica da não linearidade da folga, na seção 3.8
a modelagem dinâmica da junta sem folga, na seção 3.9 as equações da
cinemáticas direta, inversa e diferencial de robôs a partir da convenção de
Denavit-Hartenberg e na seção 3.10 é apresentada a modelagem dinâmica do
robô Gantry. Por fim, apresentam-se discussões sobre a importância dos
modelos apresentados.
3.2
Hipóteses da Modelagem
46
Os modelos que descrevem as dinâmicas da junta prismática, para o
atrito e a folga são não lineares para os quais serão adotadas como hipóteses
simplificadoras as seguintes condições:
A dinâmica elétrica não será considerada na modelagem, por ser
entendida como muito rápida em relação à dinâmica mecânica. Ou seja,
a dinâmica será modelada a partir do torque motor aplicado (
);
A folga (backlash) é constante em toda a extensão do fuso, não sendo
considerada a variação de seus parâmetros ao longo do eixo e nem
devido ao desgaste;
Para a modelagem será considerada a folga no acoplamento elástico e
entre o fuso e a castanha da junta prismática ativa;
Os elementos da transmissão são corpos rígidos (se despreza a
elasticidade);
Na modelagem incluiu-se as características não lineares do atrito.
A Tabela 7 trata da convenção na utilização de grandezas e relações
para a translação e a rotação, haja vista que estes dois movimentos estão
presentes na dinâmica do robô e acoplados por meio de uma relação
cinemática entre o deslocamento angular do fuso e o deslocamento da massa
(característica de robôs do tipo Gantry acionados por fuso).
47
Tabela 7 - Relações e Grandezas Aplicadas aos Movimentos Estudados
Grandeza Física
Translação
Rotação
Inércia
(massa)
[ ]
(momento de inércia em
relação ao eixo)
[
]
Deslocamento
(deslocamento linear)
[ ]
(deslocamento angular)
[
]
Velocidade
(velocidade linear)
[
]
(velocidade angular)
[
]
Aceleração
(aceleração linear)
[
]
(aceleração angular)
[
]
Equilíbrio
Dinâmico
[ ]
Quantidade de
Movimento
[
(quantidade de movimento linear)
]
(quantidade de movimento
angular)
Fonte: próprio autor.
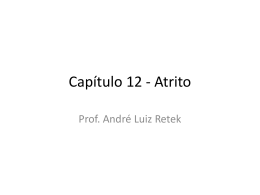
Para facilitar a compreensão da dinâmica a ser modelada, segue a Figura
20 que indica quais os sinais serão capturados para aplicação nos modelos. A
partir de um sinal de controle ( ) enviado pela caixa de comandos do inversor
de frequência, o motorredutor CA produz um torque (
angular do eixo do motorredutor (
) e um deslocamento
). Dada a existência de folga no
acoplamento elástico este deslocamento angular do eixo do motorredutor
produz um deslocamento angular ( ) do fuso a partir do torque aplicado, o qual
é convertido através de uma relação cinemática e produz uma força de reação
( ) na castanha. Entre o fuso e castanha há folga (dada a partir de uma
relação de transmissão ( ) e a diferença entre a posição inicial das esferas no
fuso do lado esquerdo ( ) e do lado direito ( )) e características não lineares
do atrito (
) presentes. A castanha se desloca linearmente ( ) de modo que
cada castanha de cada junta prismática ativa do robô Gantry, vai corresponder
a uma variável de junta ( ) dada de acordo com a convenção de DenavitHartenberg. Tais sinais serão detalhados ao longo deste capítulo nas seções
pertinentes a cada um.
48
Figura 20 – Desenho Esquemático para a Modelagem da Junta Robótica
Considerando os Principais Elementos e Não Linearidades
Fonte: próprio autor.
Nas seções a seguir serão descritas as equações que descrevem as
dinâmicas e a cinemática estudadas e por consequência cada variável e
constante destacadas na Figura 20.
3.3
Modelagem Dinâmica do Fuso de Esferas
O modelo para uma junta prismática em um robô Gantry pode ser obtido
através do método de Newton-Euler (onde cada corpo rígido é considerado
separadamente) a partir do equilíbrio dinâmico no diagrama de corpo livre, do
eixo-fuso e da massa deslocada conforme a Figura 21 a seguir.
49
Figura 21 - Diagrama de Corpo Livre com a Representação dos Torques
Atuantes no Eixo-Fuso
Fonte: próprio autor.
Pela lei do equilíbrio dinâmico, tem-se:
(1)
De acordo com a Figura 21, tem-se que um torque do motor (
aplicado no fuso e dois torques de resistência contrários ao
(
)
(torque de atrito
) e o torque de carga ( ) devido a força de reação da massa deslocada
( ) sobre o fuso) produzem um deslocamento angular
resultante (ângulo de
deslocamento angular do fuso). Logo,
(2)
Reescrevendo (2), obtém-se:
(3)
onde
(4)
Cada variável e parâmetro está descrito com sua unidade de medida (no SI)
conforme a Tabela 8.
50
Tabela 8 - Descrição dos Parâmetros e Variáveis do Modelo do Eixo-Fuso
Parâmetro/Variável
Descrição
Momento de inércia do eixo motor
Deslocamento angular do fuso
Coeficiente de atrito viscoso do eixo do motor
Torque do motor
Força da reação da massa mola deslocada
Passo do fuso
Unidade
Fonte: próprio autor.
3.4
Modelagem Dinâmica da Castanha
Aplicando-se a lei de equilíbrio dinâmico a partir do diagrama de corpo
livre conforme ilustra a
Figura 22, pode-se deduzir as equações do movimento linear da massa
deslocada.
Figura 22 - Forças Atuantes na Dinâmica da Castanha
Fonte: próprio autor.
Assim, considerando o somatório das forças atuantes na massa, tem-se:
(5)
(6)
(7)
51
Os parâmetros e variáveis da equação (7) estão descritos conforme a
Tabela 9, com suas respectivas unidades.
Tabela 9 - Descrição dos Parâmetros e Variáveis do Modelo Castanha-Massa
Parâmetro/Variável
Descrição
Massa deslocada sobre o eixo-fuso
Deslocamento linear da junta prismática
Força de reação da massa mola deslocada
Coeficiente de atrito viscoso da massa
Unidade
Fonte: próprio autor.
3.5
Modelagem Dinâmica da Junta Sem Folga
Há presença de pelo menos duas folgas no robô: uma no acoplamento
elástico e uma na castanha. Se desprezada a folga no acoplamento, a seguinte
relação é válida
(8)
Para a não linearidade da folga na castanha, a relação entre o
deslocamento linear e o deslocamento angular do fuso seria descrita através
da equação (9).
(9)
Como na modelagem será considerada apenas a folga na castanha,
apenas a equação (9) será considerada. Esta equação indica uma relação
direta e proporcional entre o deslocamento linear em
angular em
e o deslocamento
, os quais dependem apenas do passo do fuso. Ou seja, um
deslocamento angular completo de
linear de um passo
corresponde a um deslocamento
no fuso, logo o deslocamento angular de
Escrevendo a equação (9) em relação a
equivale a .
e derivando-as, obtém-se de forma
equivalente as equações (10) e (11) a seguir e estabelecem a relação
cinemática de acoplamento dinâmico.
(10)
(11)
52
Assim, substituindo as equações (10), (11) e (7) na equação (3), tem-se
(12)
Realizando operações algébricas e aritméticas, pode-se agrupar os
termos semelhantes conforme a equação (13).
(13)
Chamando de massa equivalente (
equivalente (
) e coeficiente de amortecimento
), fazendo
(14)
(15)
Pode-se reescrever a equação (13) através da equação (16), utilizando
as relações descritas nas equações (14) e (15).
(16)
E, escrevendo a equação (16) na forma de variáveis de estado, através
das relações dadas na equação (17),
(17)
obtém-se,
(18)
O modelo descrito na equação (16) deve ser reescrito, haja vista que
não se pode prever se o comportamento do atrito realmente será representado
apenas pela reta descrita em
, havendo, portanto, outras características
presentes e significativas. Logo,
(19)
53
onde,
representa ainda a força de atrito equivalente, mas contemplando
as demais características do atrito descritas e apresentadas na seção a seguir.
3.6
Modelagem da Dinâmica do Atrito
A característica não linear do atrito está presente em todos os
mecanismos mecânicos que incorporem movimentos. Estudá-lo e compreendêlo é importante para perceber seus efeitos em tais mecanismos, de modo a
compensar e por consequência diminuir seus efeitos. Canudas de Wit et al.
(1995) destaca que o atrito gera erros/ciclos limites no seguimento de
trajetórias causando efeitos de aderência-deslizamento (stick-slip – que alterna
movimentos e repousos), oscilações (hunting – o movimento varia em torno de
uma dada posição constante), perda de movimento (standstill – ocorre quando
o sistema é detido no repouso em um intervalo de tempo onde a velocidade é
nula), falha de quadratura (quadrature glitch – desvios do seguimento de um
movimento de múltiplos eixos), dentre outras dificuldades para o controle e a
estabilidade destacadas pelos autores e que são geradas pelo atrito. Os erros
citados estão apresentados na Figura 23.
Figura 23 - Alguns Efeitos do Atrito no Movimento
Fonte: Valdiero, 2012.
54
Para Valdiero (2012) e Sanca (2006), o atrito exibe diversas
características clássicas compostas pelo atrito estático, atrito de Coulomb,
atrito viscoso e o atrito de arraste, baseados em mapas estáticos e
características dinâmicas mais complexas como o atrito de Stribeck, atrito
estático crescente, memória do atrito e o deslocamento de predeslizamento.
Sanca (2006) destaca ainda que as características do atrito dependem
geralmente da velocidade, temperatura, sentido do movimento, lubrificação e
desgaste das superfícies, da posição e da história do movimento, de modo que
a escolha do modelo de atrito apropriado depende das características
apresentadas.
O atrito estático (stiction) ocorre quando a velocidade é nula e possui
sentido oposto ao do movimento com magnitude de força (ou torque) aplicada
até um valor máximo de força de atrito estático
, sendo descrito como
(20)
onde
é a velocidade e
é a função impulso descrita por
(21)
A função descrita na equação (21) é utilizada apenas para descrever o
fato de que o atrito estático ocorre apenas no repouso, podendo ser
aproximada (quando em aplicações computacionais) por uma região nas
proximidades da velocidade zero onde os movimentos da ordem de mícron (
que equivale a
) sugere que a força aplicada é aproximadamente
proporcional ao deslocamento de predeslizamento. Esta estrutura perfilar
retangular foi abordada por Karnopp (1985). A Figura 24 ilustra a característica
do atrito estático e a aproximação feita por Karnopp.
55
Figura 24 - Representação do Atrito Estático e da Aproximação de Karnopp
Fonte: Valdiero, 2012.
O atrito de Coulomb, também conhecido como atrito seco, foi
pesquisado pelo físico francês Charles Augustin de Coulomb no final do século
XVII. Esta característica do atrito independe da área de contato, e é oposta ao
movimento relativo e proporcional à força normal de contato. A equação (22)
descreve-o.
(22)
quando
, de modo que
é a magnitude do atrito de Coulomb e esta
independe da magnitude da velocidade relativa
. O atrito de Coulomb está
representado na Figura 25.
Figura 25 - Característica do Atrito de Coulomb
Fonte: Valdiero, 2012.
O atrito viscoso corresponde a uma situação de boa lubrificação e é
linearmente proporcional a velocidade, ou seja,
(23)
56
onde
é chamado de coeficiente de amortecimento viscoso. Esta
característica do atrito está apresentada na Figura 26.
Figura 26 - Característica do Atrito Viscoso
Fonte: Valdiero, 2012.
O atrito de arraste por sua vez, refere-se ao atrito causado pela
resistência de um corpo ao movimento, e é proporcional ao quadrado da
velocidade (decorrente em muitos casos de um escoamento turbulento). Ele
pode ser escrito como
(24)
onde
é o coeficiente de arraste. O gráfico da Figura 27 ilustra uma
particularidade importante deste tipo de atrito: em baixas velocidades o valor do
atrito de arraste torna-se pequeno e pode ser desconsiderado.
Figura 27 - Característica do Atrito de Arraste
Fonte: Valdiero, 2012.
57
O atrito de Stribeck é um fenômeno não linear de atrito descrito pelo
engenheiro mecânico alemão Richard Hermann Stribeck. Este fenômeno
acontece em baixas velocidades da curva de atrito onde a inclinação é
negativa, conforme apresentado na Figura 28.
Figura 28 - Característica do Atrito de Stribeck
Fonte: Valdiero, 2012.
A combinação das características de atrito citadas até agora, resultam
em uma função não linear semelhante a representada na Figura 29 onde são
relacionadas a força de atrito (
(
) e a velocidade em regime permanente
).
Figura 29 - Combinação das Características do Atrito em Regime Permanente
Fonte: Valdiero, 2012.
58
Apesar de Valdiero (2012) descrever outras características não lineares
do atrito, estas citadas anteriormente e suas combinações são muito
importantes para a compreensão de sua dinâmica.
Um grande avanço na modelagem do atrito foi proposto por Canudas de
Wit et al. (1995). O modelo dinâmico denominado LuGre (em referência as
duas universidades sueca e francesa onde fora desenvolvido – LUnd e
GREnoble) desenvolvido pelos autores, é baseado nas microdeformações que
ocorrem entre as superfícies de contato. Quando uma força tangencial é
aplicada, as cerdas elásticas se deflexionarão como molas. Se estas deflexões
forem suficientemente grandes, as cerdas irão deslizar (stick-slip). Segundo
Sanca (2006), a velocidade é que determina a deflexão média das cerdas nos
movimentos em regime permanente, a qual é modelada pelo atrito de Stribeck:
quando em velocidades baixas é menor e em regime permanente a deflexão
diminui com velocidade crescente. O diagrama da Figura 30 apresenta, em
nível microscópico, o contato entre as superfícies e o movimento relativo entre
elas com a presença de uma rugosidade elástica.
Figura 30 - Desenho Esquemático da Deflexão Microscópica das Cerdas no
Modelo Dinâmico do Atrito LuGre e a Representação das Variáveis
Fonte: Sanca, 2006.
Para Canudas de Wit et al. (1995) o atrito dinâmico é dado pela equação
(25).
(25)
59
onde
é a força de atrito dinâmico do modelo LuGre. Os parâmetros
dinâmicos
e
são o coeficiente de rigidez das deformações microscópicas
entre as superfícies em contato durante o regime de predeslizamento e o
coeficiente de amortecimento associado à taxa de variação de
respectivamente. O parâmetro estático
(ou seja, ),
é o coeficiente de amortecimento
viscoso ( ). A dinâmica do estado interno do atrito é denominado por , o qual
descreve a deflexão média das superfícies em contato durante a fase de atrito
estático,
ou,
em
outras
palavras,
a
predeslizamento. Por fim, o parâmetro
as superfícies. A taxa de variação de
deformação
do
movimento
de
representa a velocidade relativa entre
é dada pela equação (26).
(26)
A função
é dada pela expressão da equação (27).
(27)
onde
é a força de atrito de Coulomb,
é a força de atrito estático e
éa
velocidade de Stribeck.
Este modelo, no entanto, não consegue capturar a característica de
atrito estático, o que foi introduzido por Dupont, Armstrong e Hayward (2000).
Os autores desenvolveram um modelo genérico de atrito combinando o
predeslizamento e o atrito estático, fazendo assim uma extensão no modelo
LuGre substituindo a equação (26) pela equação (28) a seguir.
(28)
onde o termo
, que descreve o atrito estático em velocidades muito
baixas, está representado no gráfico da Figura 31 e descrito na equação (29).
60
Figura 31 - Gráfico da Função Utilizada Para a Obtenção do Atrito Estático
Fonte: Sanca, 2006.
onde
é chamado de deslocamento da força de quebra de modo que
todo movimento na interface de atrito consiste apenas de
deslocamentos elásticos;
é o valor máximo das microdeformações e
depende da velocidade. Para
, a função
pode ser
escrita como
(29)
E, se
, a função
pode ser escrita como
(30)
onde,
(31)
A função
permanente
constante,
permanece a mesma da equação (27). Em regime
(steady
e
state
–
)
de
deslizamento,
a
velocidade
é
, a dinâmica do atrito apresentada na equação (32)
é dada por:
(32)
Definindo,
61
(33)
Tem-se,
(34)
E, substituindo a equação (34) na equação (25), obtém-se a equação
(35) que descreve o mapa estático do atrito contemplando as características
descritas.
(35)
3.7
Modelagem da Dinâmica da Não Linearidade da Folga
A folga é uma não linearidade importante de ser compreendida,
modelada e compensada por limitar o desempenho e o controle de sistemas
mecânicos. Segundo Tao e Kokotović (1995), a folga limita muito o
desempenho causando atrasos, oscilações e imprecisões e é comum em
muitos componentes (como atuadores e conexões mecânicas). A presença
desta não linearidade acontece ainda, conforme afirma Nordin (2000), em
sistemas mecânicos em que o motor não está diretamente ligado ao movido.
A folga é uma característica não-diferenciável (por não ser contínua,
sendo descrita através de equações discretas) e não linear. Dada a existência
da folga as equações (3) e (7) descritas anteriormente nas seções 3.3 e 3.4,
não podem ser combinadas estando acopladas por uma relação matemática
com tempo discretizado que representa a relação entre o deslocamento linear
da junta prismática ( ) e o deslocamento angular ( ) na presença de folga,
descritas por e apresentada na equação (36). Este modelo para folga foi
adotado com base no trabalho de Tao e Kokotović (1995).
(36)
onde
,
e
são os parâmetros constantes da não-linearidade de folga
no fuso, e as expressões de
e
são dados pelas equações (37) e (38)
62
(37)
(38)
Na Figura 32 a seguir, apresenta-se o desenho esquemático da não
linearidade da folga bem como sua representação gráfica
Figura 32 - Representação da Não Linearidade da Folga: (a) Desenho
Esquemático; (b) Gráfico do Modelo
Fonte: Tao e Kokotović (1995).
As variáveis do modelo apresentado nas equações (36), (37) e (38)
estão descritas na Tabela 10.
Tabela 10 – Descrição dos Parâmetros e Variáveis do Modelo da Não
Linearidade da Folga
Parâmetro/Variável
e
Descrição
Ângulo de deslocamento angular do fuso (entrada do sistema)
Deslocamento linear da junta prismática (saída do sistema)
Posição inicial lado esquerdo (left)
Posição inicial lado direito (right)
Relação de transmissão
Funções de Projeções
Fonte: próprio autor.
3.8
Modelagem Dinâmica da Junta com Folga
Unidade
63
A modelagem da folga não é dinâmica. Ela acontece pontualmente nas
inversões de movimento. Essa característica afeta diretamente a modelagem
da junta prismática.
As equações (3) e (7) podem, no entanto, ser escritas na forma de
variáveis de estados e acopladas num único sistema de quarta ordem se
considerada a não linearidade da folga descrita nas equações da seção 3.7.
Para isso são estabelecidas as relações
(39)
Para obter-se a equação (40) que é o modelo dinâmico de uma junta
prismática incluindo a folga.
(40)
3.9
Equações da Cinemática do Robô Gantry
A modelagem matemática, pode auxiliar os engenheiros pesquisadores
na tomada de decisões do projeto mecatrônico e do controle, investigando a
otimização do desempenho do sistema, através do estudo e da validação de
modelos que descrevem as características geométricas, cinemáticas e
dinâmicas (lineares e não lineares).
Quando se controla o movimento de robôs em aplicações industriais, é
necessário conhecer a trajetória operada ponto-a-ponto, sendo necessário
ainda, conforme destacam Kinzel e Waldron (2004), um trajetória suave entre a
posição inicial e final do efetuador. Problemas com esta característica podem
ser tratados através da modelagem cinemática direta, inversa diferencial.
Na modelagem da cinemática direta do robô buscou-se fazer uso da
convenção de Denavit-Hartenberg (D-H), que integra, segundo Romano (2002)
a definição de sistemas coordenados em cada elo do robô, e sua posterior
64
relação com matrizes de transformação. Este sistema é descrito em uma matriz
de transformação de coordenadas homogêneas a qual relaciona o movimento
de um elo em relação ao anterior
, conforme a equação (41).
(41)
A equação (41) é equivalente a
(42)
Este sistema é descrito em uma matriz de transformação de
coordenadas homogêneas escritas de acordo com o elo da qual resulta a
posição e orientação do efetuador final. A cinemática direta de robôs busca,
dados os valores das variáveis de juntas do robô (
e
,
é o ângulo formado entre os eixos
é a ordenada medida ao longo de
eixo
e
distância entre os eixos
e
em torno do eixo
que localiza o eixo
é o ângulo formado entre os eixos
e
,
em relação ao
medido em torno de
), calcular a posição e a orientação do efetuador final. Assim, estão
representados na Figura 33 os sistemas de coordenadas traçados sob cada
elo do robô utilizando-se da convenção.
65
Figura 33 – Eixos Coordenados Sob Cada Elo Segundo a Convenção D-H
Fonte: próprio autor.
Conforme a determinação dos sistemas coordenados de referência em
cada elo a partir da convenção D-H, os parâmetros estão inseridos na Tabela
11.
Tabela 11 - Parâmetros D-H
Fonte: próprio autor.
Os parâmetros
o parâmetro
é variável. Os parâmetros
, pois os eixos estão sobrepostos e
,
e
dependem da forma como
está construído o robô. Os parâmetros descritos na Tabela 11, estão
representados na Figura 34.
66
Figura 34 - Representação dos Parâmetros D-H
Fonte: próprio autor.
Nas equações (43), (44) e (45) são apresentadas as matrizes de
transformação homogênea.
(43)
(44)
(45)
As matrizes acima fornecem a possibilidade de cálculo ponto a ponto da
posição, sendo indispensáveis para o planejamento das atividades do
manipulador robótico. O produto à esquerda entre as matrizes (43), (44) e (45)
resulta na matriz de transformação homogênea que relaciona o último sistema
de referência (do efetuador final) ao sistema da base conforme a equação (46).
67
(46)
Ou seja,
(47)
Os vetores (48), (49) e (50) indicam a orientação do efetuador final em
relação à base fixa (elo zero), enquanto o vetor (51) indica a orientação da
garra ou ferramenta em relação a base fixa.
(48)
(49)
(50)
(51)
Pode-se, através da variação das variáveis, recalcular as matrizes e se
obter novas posições e orientações.
Na cinemática direta do robô, a partir da posição de junta se obtém a
posição da garra. Na cinemática inversa se pode a partir da posição da garra
obter-se a posição da junta, ou seja, dadas a posição e orientação do efetuador
final se pode determinar as variáveis posição de junta. Assim, a partir do vetor
da equação (51), se pode estabelecer as relações a seguir
(52)
Se pode ainda, a partir das cinemáticas inversa e direta, escrever a
cinemática diferencial do robô, a qual relaciona as velocidades de junta com as
correspondentes velocidades lineares e angulares do efetuador final. No caso
da junta prismática, esta tarefa é mais simples devido ao desacoplamento
68
cinemático e dinâmico entre as juntas. A cinemática diferencial pode ser
expressa através da equação (53).
(53)
De modo que o vetor das velocidades lineares ( ) e angulares ( ), pode
ser escrito através das velocidades lineares na direção
,
respectivamente) e das velocidades angulares em torno de
e
,
( ,
e
(
e
,
,
e
, respectivamente). De modo equivalente, o vetor das velocidades ( ), pode
ser escrito através do produto entre a matriz Jacobiana analítica (
) e o vetor
de velocidades no espaço das juntas ( ). De acordo com Sciavicco e Siciliano
(1996) a matriz Jacobiana contém importantes informações estruturais sobre o
mecanismo do robô, além de ser relevante para o planejamento e execução
das trajetórias. O número de linhas linearmente independentes é igual ao
número de graus de liberdade controláveis no espaço enquanto o número de
colunas indica o número de graus de liberdade. Os autores destacam ainda a
dificuldade de se determinar a matriz Jacobiana, uma vez que se requer a
formulação e cálculo de matrizes que dependem das características
construtivas do robô. A matriz Jacobiana e o vetor das velocidades das juntas
(rotativa ou prismática), podem ser escritas conforme a equação (54).
(54)
onde, para uma junta prismática, se tem a relação
(55)
e para uma junta rotativa, tem-se
(56)
Para o robô Gantry, considerando dois graus de liberdade e suas juntas
prismáticas, pode-se escrever a seguinte equação (57).
69
(57)
Para a junta 1, tem-se
(58)
E para a junta 2, tem-se
(59)
Assim,
(60)
Logo, a velocidade da junta pode ser expressa pelo vetor
(61)
3.10
Modelagem Dinâmica do Robô Gantry
Sciavicco e Siciliano (1996) desenvolvem a equação dinâmica utilizando a
formulação de Lagrange para um robô com
graus de liberdade na ausência
de forças externas no efetuador final e desprezando o atrito nas estruturas,
pode-se obter o modelo dinâmico no espaço das juntas por meio da equação
(62).
(62)
70
onde
é um vetor de coordenadas generalizadas das juntas,
de inércia,
é a matriz
é a matriz dos efeitos centrífugos e de Coriolis e
éo
momento gerado em cada eixo devido à gravidade. O vetor de torque e/ou
força
, que pode ser escrito, a partir do princípio do trabalho virtual
(SCIAVICCO e SICILIANO, 1996, p. 106) através da equação (63), como o
produto entre a matriz Jacobiana transposta e a força generalizada no
efetuador final.
(63)
No entanto, para o robô Gantry, a matriz dos efeitos centrífugos e de
Coriolis pode ser desconsiderada bem como os efeitos da gravidade dada as
características da forma constitutiva do robô (SCIAVICCO e SICILIANO, 1996).
E, como se está considerando os efeitos do atrito, se pode reescrever a
equação (62) através da equação (64) de forma equivalente.
(64)
E, escrevendo na forma matricial,
(65)
Como o modelo do robô Gantry pode ser explicitado através da relação
entre os torque gerados e a massa deslocada conforme a equação da seção
3.5.
(66)
Fazendo
(67)
e generalizando para os dois graus de liberdade.
(68)
(69)
Reescrevendo na forma matricial
(70)
71
Porém a matriz
depende de
disso,
não é equivalente a matriz
e
enquanto a matriz
, dado que a matriz
depende de
possui uma origem diferente da origem do
e
. Além
padronizado (pois o
depende da convenção D-H, o que acarretaria a necessidade da modelagem
cinemática anteriormente à determinação da origem de ). A escolha da origem
do
se deve a necessidade de haver um deslocamento positivo e negativo na
validação dos modelos e pela possibilidade de ser generalizado para quaisquer
outra transmissão por fuso de esferas. Assim, cabe determinar uma relação
entre
e , de modo a construir a matriz de inércia para o robô Gantry. Esta
relação está apresentada a seguir.
Na Figura 35 deslocou-se todo o segundo grau de liberdade para a
direita, na posição mínima de medição e aferiu-se a distância entre o a lateral
esquerda da estrutura de cantoneiras e o zero do sistema de coordenadas do
elo zero. Ao mesmo tempo, fez-se a medida entre o centro de medição de
deslocamento e o zero do sistema de coordenadas do elo zero.
72
Figura 35 - Determinação dos Coeficientes
e
Fonte: próprio autor.
Posteriormente, conforme a Figura 36, deslocou-se à posição máxima
de medição e aferiu-se a distância entre a lateral esquerda da estrutura de
cantoneiras e o zero do sistema de coordenadas do elo zero. Ao mesmo
tempo, fez-se a medida entre o centro de medição de deslocamento e o zero
do sistema de coordenadas do elo zero.
73
Figura 36 - Determinação dos Coeficientes
e
Fonte: próprio autor.
Para o segundo grau de liberdade, utilizou-se do mesmo procedimento
descrito anteriormente. Primeiramente, conforme Figura 37, deslocou-se todo
o elo três para a direita, na posição mínima de medição e aferiu-se a distância
entre a lateral esquerda da estrutura de cantoneiras da castanha e o zero do
sistema de coordenadas do elo um. Ao mesmo tempo, fez-se a medida entre o
centro de medição de deslocamento e o zero do sistema de coordenadas do
elo um.
74
Figura 37 - Determinação dos Coeficientes
e
Fonte: próprio autor.
Posteriormente, conforme Figura 38, deslocou-se à posição máxima de
medição e aferiu-se a distância entre a lateral esquerda da estrutura de
cantoneiras da castanha e o zero do sistema de coordenadas do elo um. Ao
mesmo tempo, fez-se a medida entre o centro de medição de deslocamento e
o zero do sistema de coordenadas do elo um.
75
Figura 38 - Determinação dos Coeficientes
e
Fonte: próprio autor.
A partir das figuras apresentadas anteriormente, obtém-se os valores
apresentados na Tabela 12.
Tabela 12 - Valores Determinados para os Parâmetros Cinemáticos
Elo
Parâmetro
Valor
1
2
Unidade
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
Fonte: próprio autor.
Dado que se pode escrever
em função de
conforme a equação (71)
(71)
Pode-se escrever um sistema de relação linear entre os parâmetros,
conforme a equação (72).
76
(72)
Com os parâmetros descritos na Tabela 12, se pode escrever a relação
da equação (73) para o primeiro grau de liberdade.
(73)
Resolvendo o sistema linear da equação (73) obtém-se a relação da
equação (74) para o primeiro grau de liberdade
(74)
Com os parâmetros descritos na Tabela 12, se pode escrever também a
relação da equação (75) que representa o segundo grau de liberdade.
(75)
Resolvendo o sistema linear obtém-se a relação da equação (75) para o
segundo grau de liberdade
(76)
Derivando as equações (74) e (76), têm-se as relações apresentadas.
(77)
(78)
(79)
(80)
Assim, a partir das relações obtidas nas equações (77), (78), (79) e (80),
pode-se reescrever a equação (67) na forma da equação (81).
(81)
A equação (81) representa o modelo dinâmico do robô do tipo Gantry.
3.11
Discussões
Este capítulo tratou da modelagem matemática da dinâmica e
cinemática de um robô Gantry com acionamento por fuso de esferas,
77
destacando as não linearidades da folga e atrito, muito comuns em
manipuladores robóticos deste tipo, e de suma importância para a
compreensão do comportamento, para a definição das estratégias de controle
e para a compensação de erros e dificuldades nas trajetórias traçadas.
Como na aplicação do protótipo desenvolvido opera-se em baixas
velocidades, será utilizado apenas o mapa estático do atrito e não o modelo
completo de LuGre. O mapa estático, no entanto, fornece informações
relevantes sobre outras características que, em geral, não são consideradas
pela literatura (a qual faz aproximação do atrito apenas por sua característica
linear).
Cabe destacar que caso não houvesse a não linearidade da folga, o
modelo adotado seria de segunda ordem e não de quarta ordem, ou seja, o
modelo sem a folga possui dois estados frente aos quatro estados do modelo
com a folga o que aumenta, portanto, a ordem do sistema. Aliado a isso o
estudo das características do atrito, além de melhorar a acurácia dos modelos,
fornece um mapa estático de atrito que será apresentado nas próximas seções.
A modelagem cinemática de robôs do tipo Gantry é mais simples por
apresentarem apenas juntas prismáticas, mas apresenta a importante
informação de posição e velocidade dos elos e do efetuador final em relação
aos outros elos e à base fixa, respectivamente.
Os modelos descritos são aplicados apenas à um grau de liberdade
podendo ser generalizados para os dois graus de liberdade.
O estudo apresentado nesta seção geraram publicações em Fiori
(2014a) e Fiori (2014b), sendo relevantes para a compreensão da modelagem.
78
4 Resultados
4.1
Introdução
Neste capítulo é apresentada a implementação computacional dos modelos
matemáticos descritos no capítulo 3. A metodologia utilizada na determinação
das constantes e variáveis está explicitada em cada seção.
Para a identificação da não linearidade da seção 4.2, foram realizados
testes experimentais na bancada descrita no capítulo 2. Na seção 4.2.1
encontra-se a identificação das características do atrito através de seu mapa
estático enquanto na seção 4.2.2 é descrita a identificação experimental da
folga. Na seção seguinte 4.3, é apresentada a validação do modelo dinâmico
sem folga.
4.2
Identificação Experimental das Características Não Lineares
4.2.1 Atrito
Para a identificação da não linearidade do atrito, foram realizados testes
experimentais no protótipo do robô Gantry. Os testes consistiam da regulagem
de um potenciômetro em uma determinada marcação, a qual representava uma
determinada velocidade de execução do movimento. Em cada marcação era
executado o deslocamento positivo e negativo, variando a em cada teste a
velocidade, conforme a viabilidade da instrumentação, da mais baixa a mais
alta. Em cada teste são coletados os dados obtido através do ControlDesk e da
instrumentação.
A Figura 39 apresenta a coleta dos dados de deslocamento do robô
Gantry, variando sua velocidade de muito lenta a muito rápida.
79
Figura 39 - Coleta dos Dados para a Identificação do Atrito
Fonte: próprio autor.
Em cada teste, a partir dos dois multímetros e do wattímetro instalados,
coletou-se no regime permanente as correntes (1), tensões (2) e potências (3)
indicadas conforme apresentado na Figura 40.
Figura 40 - Coleta de Dados da Instrumentação: um Wattímetro (3), um
Voltímetro (2) e um Amperímetro (1)
Fonte: próprio autor.
Na Tabela 13 a seguir, encontram-se todas as coletas.
80
Tabela 13 - Dados de Corrente, Tensão e Potência Coletadas em Regime
Corrente Tensão
[A]
[V]
Potência
Calculada
[AV]
Wattímetro
[W]
Sentido
Posição
Sentido
Permanente
Potência
Corrente Tensão
Wattímetro
Calculada
[A]
[V]
[W]
[AV]
223
118,19
110
0,51
222
113,22
110
b
0,52
220
114,4
112
0,54
220
118,8
114
c
0,57
231
131,67
126
0,58
232
134,56
126
d
0,59
229
135,11
127
0,58
230
133,4
127
e
0,61
232
141,52
131
0,6
230
138
131
f
0,63
226
142,38
133
0,64
227
145,28
133
g
0,7
221
154,7
146
0,69
221
152,49
147
h
0,75
232
174
166
0,75
233
174,75
166
i
0,8
228
182,4
166
0,78
227
177,06
166
j
0,79
222
175,38
168
0,79
222
175,38
168
k
0,82
231
189,42
180
0,83
232
192,56
180
l
0,85
234
198,9
180
0,84
232
194,88
180
0,86
223
191,78
184
0,86
223
191,78
184
1,02
228
232,56
223
1,05
228
239,4
223
m
n
o
NEGATIVO
0,53
POSITIVO
a
1,08
224
241,92
230
1,08
224
241,92
230
p
1,15
229
263,35
242
1,17
229
267,93
242
q
1,13
227
256,51
235
1,15
227
261,05
244
r
1,17
228
266,76
253
1,2
228
273,6
253
s
1,2
224
268,8
256
1,22
224
273,28
260
t
1,21
227
274,67
254
1,26
227
286,02
266
u
1,39
226
314,14
286
1,42
226
320,92
298
v
1,5
224
336
312
1,5
224
336
322
w
1,54
225
346,5
315
1,53
223
341,19
324
x
1,56
224
349,44
325
1,58
225
355,5
335
y
1,65
226
372,9
340
1,63
225
366,75
343
z
1,69
225
380,25
346
1,53
224
342,72
345
Fonte: próprio autor.
Não será considerada a potência calculada, pois existe uma defasagem
(fasor) entre as ondas de corrente e tensão, e, como não foram tomadas pico a
pico para a medição, utiliza-se a potência elétrica medida pelo wattímetro. Além
da coleta das potências, obteve-se também os dados de tempo de simulação e
deslocamento linear e angular a partir do software ControlDesk. Em cada
experimento foi gerado o gráfico de seu deslocamento e posteriormente, no
trecho onde a velocidade é constante, ajustou-se uma reta. O ajuste da reta se
faz necessário para melhorar o ajuste dos parâmetros estáticos de atrito, além
do fato de que quando a aceleração é nula a inércia é desprezada. Para isso,
utilizam-se as relações das equação (82) e (83) onde o coeficiente angular da
81
reta indica a velocidade naquele trecho, ou ainda, a derivada da equação da
reta indica a velocidade no trecho. Ou seja,
(82)
(83)
Logo, a equação
(84)
apresentada na seção 3.5, pode ser reescrita de forma que a força produzida
(torque) iguala-se à força de atrito,
(85)
de acordo com as relações descritas anteriormente nas equação (82) e (83).
Na Figura 41 apresenta-se aleatoriamente um dos deslocamentos
positivo na posição “c” (vide Tabela 13), com uma potência elétrica de
,e
o respectivo ajuste no trecho linear. Os sinais de controle são, para estes
casos, as potência produzidas a partir de cada regulagem do potenciômetro em
cada ponto, dado que se está desconsiderando a modelagem elétrica do robô
Gantry.
82
Figura 41 - Deslocamento Positivo na Posição “c” e Ajuste da Reta no Trecho
de Deslocamento Linear
Deslocamento Real
0.5
Deslocamento (m)
y (m)
0
-0.5
0
100
200
300
400
Tempo (s)
500
600
700
800
Deslocamento Ajustado
Deslocamento (m)
0.5
0
y(m) experimental
y(m) ajuste
-0.5
0
100
200
300
400
Tempo (s)
500
600
700
800
Fonte: próprio autor.
Para a mesma posição do potenciômetro e com a mesma potência de
, obteve-se o deslocamento e o ajuste negativos descritos na Figura 42.
83
Figura 42 - Deslocamento Negativo na Posição “c” e Ajuste da Reta no Trecho
de Deslocamento Linear
Deslocamento Real
0.5
Deslocamento (m)
y (m)
0
-0.5
0
100
200
300
400
Tempo (s)
500
600
700
800
600
700
800
Deslocamento Ajustado
Deslocamento (m)
0.5
0
y(m) experimental
y(m) ajuste
-0.5
0
100
200
300
400
Tempo (s)
500
Fonte: próprio autor.
De posse das informações da velocidade, estimou-se o torque motor.
Para isso, utilizou-se a informação do fabricante sobre o rendimento do
motorredutor CA (descrito na Tabela 1) para estimar o torque. Como em
nenhuma das velocidades desempenhadas, o motor ultrapassou 50% de sua
potência máxima (conforme Tabela 13), ou seja, em nenhum dos testes o
motor ultrapassou 375W, utilizou-se um rendimento ( ) constante dado pelo
produto entre o rendimento do motor (74%) e do redutor (78%), para o cálculo
da potência mecânica dada pela equação (86).
(86)
Os dados de velocidade linear e angular foram capturados nas
simulações, conforme descrito anteriormente. Sabe-se que o torque motor
pode ser obtido pela relação
84
(87)
Desta forma, os valores obtidos estão apresentados na Tabela 14 a
seguir.
Tabela 14 - Cálculo dos Torques em Regime Permanente a partir da Potência
Elétrica e Rendimento com “P” Para Positivo e “N” Para Negativo
[ ]
Teste
[
[ ]
=
]
[
[
]
]
P
N
P
N
P
N
P
N
a
0,5772
110
110
63,4920
63,4920
0,0006
-0,0006
0,3652
-0,3664
173,8389 -173,2720
P
N
b
0,5772
112
114
64,6464
65,8008
0,0006
-0,0006
0,3682
-0,3681
175,5918 -178,7621
c
0,5772
126
126
72,7272
72,7272
0,0006
-0,0006
0,3701
-0,3692
196,5256 -196,9701
d
0,5772
127
127
73,3044
73,3044
0,0006
-0,0006
0,4020
-0,4012
182,3495 -182,6928
e
0,5772
131
131
75,6132
75,6132
0,0006
-0,0006
0,4025
-0,4014
187,8783 -188,3844
f
0,5772
133
133
76,7676
76,7676
0,0007
-0,0007
0,4522
-0,4518
169,7579 -169,9017
g
0,5772
146
147
84,2712
84,8484
0,0033
-0,0033
2,0823
-2,0826
40,4708
h
0,5772
166
166
95,8152
95,8152
0,0013
-0,0013
0,8340
-0,8356
114,8932 -114,6730
i
0,5772
166
166
95,8152
95,8152
0,0036
-0,0037
2,2830
-2,2969
41,9687
-41,7155
j
0,5772
168
168
96,9696
96,9696
0,0061
-0,0061
3,8460
-3,8486
25,2128
-25,1958
k
0,5772
180
180 103,8960 103,8960 0,0021
-0,0021
1,3185
-1,3181
78,8004
-78,8214
l
0,5772
180
180 103,8960 103,8960 0,0032
-0,0032
1,9878
-2,0004
52,2679
-51,9365
m
0,5772
184
184 106,2048 106,2048 0,0076
-0,0076
4,7439
-4,7444
22,3878
-22,3853
n
0,5772
223
223 128,7156 128,7156 0,0093
-0,0093
5,8446
-5,8424
22,0228
-22,0314
o
0,5772
230
230 132,7560 132,7560 0,0108
-0,0108
6,7742
-6,7752
19,5973
-19,5944
p
0,5772
242
242 139,6824 139,6824 0,0148
-0,0148
9,2823
-9,2868
15,0483
-15,0409
q
0,5772
235
244 135,6420 140,8368 0,0161
-0,0161
10,0918
-10,1053
13,4408
-13,9369
r
0,5772
253
253 146,0316 146,0316 0,0120
-0,0120
7,5509
-7,5626
19,3395
-19,3098
s
0,5772
256
260 147,7632 150,0720 0,0136
-0,0137
8,5650
-8,5822
17,2519
-17,4864
t
0,5772
254
266 146,6088 153,5352 0,0177
-0,0177
11,1112
-11,1171
13,1947
-13,8107
u
0,5772
286
298 165,0792 172,0056 0,0195
-0,0196
12,2798
-12,2915
13,4431
-13,9938
v
0,5772
312
322 180,0864 185,8584 0,0207
-0,0207
12,9854
-12,9854
13,8684
-14,3128
w
0,5772
315
324 181,8180 187,0128 0,0207
-0,0207
12,9861
-12,9827
14,0010
-14,4048
x
0,5772
325
335 187,5900 193,3620 0,0207
-0,0207
12,9797
-12,9787
14,4526
-14,8984
y
0,5772
340
343 196,2480 197,9796 0,0207
-0,0206
12,9787
-12,9741
15,1208
-15,2596
z
0,5772
346
345 199,7112 199,1340 0,0206
-0,0206
12,9720
-12,9731
15,3955
-15,3497
-40,7417
Fonte: próprio autor.
Utilizando-se da equação (85), onde a força de atrito é escrita como o
produto entre o torque motor e a razão entre uma volta completa e o passo, se
pode, fazendo uso os dados experimentais em regime permanente da Tabela
85
14, obter os seguintes torques e respectivas velocidades descritos na Tabela
15.
Tabela 15 - Velocidades e Torques nos Testes em Regime Permanente
Testes
Velocidades
Positivas [
]
Força de Atrito
Positiva [ ]
Velocidades
Negativas [
]
Força de Atrito Negativa
[ ]
a
0,0006
109226,2065
-0,0006
-108869,9783
b
0,0006
110327,6084
-0,0006
-112319,5298
c
0,0006
123480,6485
-0,0006
-123759,9711
d
0,0006
114573,5744
-0,0006
-114789,2670
e
0,0006
118047,4303
-0,0006
-118365,4395
f
0,0007
104256,1498
-0,0007
-106752,3688
g
0,0033
25428,5510
-0,0033
-25598,7541
h
0,0013
72189,5333
-0,0013
-72051,1750
i
0,0036
26369,6950
-0,0037
-26210,6504
j
0,0061
15841,6842
-0,0061
-15830,9871
K
0,0021
51162,1749
-0,0021
-49524,9351
l
0,0032
32840,8803
-0,0032
-32632,6459
m
0,0076
14066,6770
-0,0076
-14065,0847
n
0,0093
13465,0477
-0,0093
-13842,7504
o
0,0108
12313,3369
-0,0108
-12311,5298
p
0,0148
9298,8246
-0,0148
-9450,4710
q
0,0161
8445,1194
-0,0161
-8756,8167
r
0,0120
11911,2464
-0,0120
-12132,6778
s
0,0136
10839,6987
-0,0137
-10987,0208
t
0,0177
8290,4451
-0,0177
-8677,5168
u
0,0195
8446,5693
-0,0196
-8792,5853
v
0,0207
8713,7608
-0,0207
-8993,0208
w
0,0207
8797,0654
-0,0207
-9050,7924
x
0,0207
9080,8367
-0,0207
-9360,9358
y
0,0207
9500,6736
-0,0206
-9587,8703
z
0,0206
9673,3020
-0,0206
-9644,5127
Fonte: próprio autor.
Os resultados dos testes em regime permanente são representados na
forma do gráfico da Figura 43.
86
Figura 43 - Gráfico do Mapa Estático do Atrito
5
1.5
x 10
Dinâmica do Atrito
Negativo
Positivo
Força de atrito [N]
1
0.5
0
-0.5
-1
-1.5
-0.025 -0.02 -0.015 -0.01 -0.005
0
0.005
Velocidade [m/s]
0.01
0.015
0.02
0.025
Fonte: próprio autor.
Com a curva apresentada na Figura 43, pode-se ajustar uma curva ao
mapa estático, conforme apresentado na Figura 44, relacionando a velocidade
em regime permanente e a força de atrito. Levando em consideração a
equação (88) do atrito descrita na seção 3.6 (mapa estático de atrito) a qual
captura as características do atrito estático, atrito de Coulomb, atrito de arraste
e o atrito de Stribeck.
(88)
Para o ajuste utilizou-se a função nlinfit do MatLab e o ajuste por
simulações computacionais, de modo a realizar o melhor ajuste dos
parâmetros, descritos na Tabela 16.
87
Tabela 16 - Parâmetros para o Cálculo das Características do Atrito
Parâmetro
Descrição
Coeficiente de atrito de Coulomb
Coeficiente de atrito estático
Velocidade de Stribeck
Coeficiente de amortecimento viscoso ( ) positivo
Coeficiente de amortecimento viscoso ( ) negativo
Massa deslocada
Momento de inércia do eixo motor
Massa equivalente
Valor
Unidade
Fonte: próprio autor.
Assim, o mapa estático do atrito pode ser ajustado conforme
apresentado na Figura 44. O programa utilizado no ajuste está descrito no
Apêndice B.
Figura 44 - Mapa Estático do Atrito Relacionando no Eixo
(
) e no Eixo
a Força de Atrito
a Velocidade ( ) em Regime Permanente
5
1.5
x 10
Força de atrito [N]
1
0.5
0
-0.5
-1
-1.5
-0.025 -0.02 -0.015 -0.01 -0.005
0
0.005
Velocidade [m/s]
0.01
0.015
0.02
0.025
Fonte: próprio autor.
Os valores descritos na Tabela 16 serão utilizados nas simulações
computacionais posteriores.
88
4.2.2 Folga
Na identificação da folga foi adotado o procedimento descrito por
Menuzzi (2011) a partir da aquisição de dados experimentais da bancada.
Inicialmente se posiciona o robô no zero referencial de . Em seguida faz-se o
deslocamento para o sentido negativo pouco atrás do ponto escolhido para ser
o inicio do teste. Em seguida, movimenta-se minimamente o robô para o lado
oposto, de modo a zerar a folga à direita. Logo, a folga total acaba sendo igual
à própria folga ao lado direito. Este procedimento esta esquematizado no
diagrama da Figura 45 a seguir.
Figura 45 - Diagrama do Procedimento Para a Identificação da Folga
Fonte: próprio autor.
89
Cabe ressaltar que a folga está presente em pelo menos duas situações:
no acoplamento elástico e na castanha e que portanto as duas serão
identificadas. Teve-se especial atenção para adotar-se uma trajetória que
possibilitasse a inversão do movimento, haja vista que a folga está presente
especialmente nestas situações.
Para a folga no acoplamento há diferença entre os deslocamentos
angulares, ou seja, a relação de igualdade entre o deslocamento aplicado e o
produzido, descrita na equação (8) da seção 3.5, não é válida dada a
existência da não linearidade de folga conforme é apresentado na Figura 46.
Figura 46 - Identificação Experimental da Folga: Deslocamento Angular
Completo com Inversão de Movimento
Fonte: próprio autor.
Para destacar tal diferença, a Figura 47 apresenta um detalhe do
deslocamento angular realizado.
90
Figura 47 - Detalhe do Primeiro Ciclo Completo de Movimento Angular
Fonte: próprio autor.
A folga angular é apresentada na Figura 48.
Figura 48 - Folga no Acoplamento Elástico
Fonte: próprio autor.
91
A partir da Figura 48, pode-se estimar o vão central (
sendo
(
), como
). Esta folga angular está gerando uma folga linear de
(dada a partir da equação (9) da seção 3.5).
Quanto a folga na castanha, a Figura 49, apresenta a simulação para
verificação da não linearidade.
Figura 49 - Identificação Experimental da Folga: Deslocamento Linear
Completo com Inversão de Movimento
-3
1.5
Deslocamento
x 10
y - teste experimental[m]
y - ideal(sem folga)[m]
1
0.5
0
-0.5
-1
-1.5
20
25
30
Tempo [s]
35
40
Fonte: próprio autor.
Percebe-se que há diferença entre o deslocamento linear ideal (onde o
produto entre o deslocamento angular e o passo dividido por uma volta,
conforme a equação (9) da seção 3.5) e o obtido experimentalmente. Logo, a
folga na castanha indica uma diferença de deslocamento linear. Assim, o
gráfico da Figura 50 detalha tal diferença.
92
Figura 50 - Detalhe do Primeiro Ciclo Completo de Movimento Linear
-3
1.5
Detalhe do Deslocamento
x 10
y - teste experimental[m]
y - ideal(sem folga)[m]
Deslocamentos [m]
1
0.5
0
-0.5
-1
19
20
21
22
Tempo[s]
23
Fonte: próprio autor.
A folga linear é apresentada na Figura 51.
Figura 51 - Folga na Castanha
Fonte: próprio autor.
24
25
93
A partir da Figura 51, pode-se estimar também a folga total (vão central
(
)), como sendo
.
Assim, as folgas estimadas serão desconsideradas, pois são muito
pequenas se comparadas a outras não linearidades como o atrito, por exemplo.
4.3
Validação do Modelo Matemático Sem a Dinâmica da Folga
A dinâmica da folga está presente nas inversões de movimentos bem
como nas partidas/paradas. Quando o movimento está acontecendo (em
regime permanente), o modelo matemático que descreve o deslocamento,
levando em consideração a dinâmica do atrito, pode ser escrito através da
equação (89) e anteriormente apresentada na seção 3.5.
(89)
Considerando a dinâmica do atrito descrita na equação (90), descrita na
seção 3.6.
(90)
Aleatoriamente, se escolheu uma simulação para validar o modelo. As
características desta simulação estão descritas na Tabela 17 a seguir. A
simulação representa um deslocamento negativo (volta).
Tabela 17 - Parâmetros para a Validação do Modelo Sem Folga
Parâmetro
Descrição
Velocidade em regime permanente
Tempo inicial do movimento
Torque motor aplicado
Condição inicial de partida
Valor
Unidade
5
Fonte: próprio autor.
Considerando os parâmetros descritos na Tabela 16 (para o coeficiente
de amortecimento viscoso negativo (
)), e ainda os parâmetros da Tabela 17
para se fazer a simulação utilizando o Simulink/MatLab, a partir da escrita do
diagrama de blocos apresentado na Figura 52.
94
Figura 52 - Diagrama de Blocos do Modelo da Massa Incorporando a Dinâmica
do Atrito
Tm
Fu
Fi
Força Aplicada
Força Inercial
(2*pi)/p
1
s
1
s
y
Integrator
Integrator1
Deslocamento
1/Me
Tm
Modelo de Atrito
dy
Fatr
dy
Velocidade
Fatr
Força de Atrito
Fonte: próprio autor.
onde, no modelo dinâmico do atrito, há o mapa estático do atrito, descrito na
equação (90) da seção 3.6 e escrito no diagrama de blocos da Figura 53.
Figura 53 - Modelo Dinâmico do Atrito LuGre
1
dy
Sign(y)
Atrito
1
Product2
Fatr
(fc+(fs-fc)*(exp(-(u/dys)^2)))
Modelo Estático de Atrito
sigma2
Coeficiente de Amortecimento Viscoso
Fonte: próprio autor.
Assim, a Figura 54 apresenta o comportamento experimental e o obtido
através do modelo matemático.
95
Figura 54 – Deslocamento Negativo para a Validação do Modelo Dinâmico
Sem Folga
Comparação
0.2
y - teste experimental
y - simulação computacional
Diferença (erro)
0.15
Deslocmaneto [m]
0.1
0.05
0
-0.05
-0.1
-0.15
4
6
8
10
12
14
Tempo [s]
16
18
20
22
Fonte: próprio autor.
Na Figura 54, apresenta-se a validação do modelo no trecho negativo
da posição “x” do potenciômetro (vide Tabela 15) A mesma posição, mas com
deslocamento positivo, está apresentado na Figura 55.
96
Figura 55 - Deslocamento Positivo para a Validação do Modelo Dinâmico Sem
Folga
Comparação
0.15
0.1
Deslocmaneto [m]
0.05
0
-0.05
-0.1
y - teste experimental
y - simulação computacional
Diferença (erro)
-0.15
-0.2
4
6
8
10
12
14
Tempo [s]
16
18
20
22
Fonte: próprio autor.
Na comparação apresentadas na Figura 54 e na Figura 55, entre o
teste experimental e a simulação computacional, percebe-se que o modelo
descreve com acurácia o trecho além de representar bem o experimento.
97
5 Conclusões e Perspectivas Futuras
Apresentou-se nesta dissertação o desenvolvimento e a validação da
modelagem matemática das características não lineares de atrito e folga
presentes na transmissão mecânica do tipo fuso de esferas com um
acionamento elétrico por motorredutor elétrico de corrente alternada com
inversor de frequência em robôs do tipo Gantry para uma entrada em torque
motor
.
Construiu-se e descreveu-se a bancada de testes experimentais e
realizou-se a revisão bibliográfica em literatura clássica e recente, evidenciando
relevância desta pesquisa por tratar da presença de tais características, de sua
modelagem e suas amplas aplicações.
Identificaram-se os principais parâmetros característicos da dinâmica e
cinemática modelados e se fez a proposição de um modelo dinâmico para um
robô Gantry que contenha a não linearidades de atrito. Além disso, apresentouse o mapa estático das principais características do atrito evidenciando que há
características relevantes e não consideradas pela literatura.
Fez-se a validação do modelo da junta sem a não linearidade da folga,
mas utilizando o mapa estático do atrito, através de simulações computacionais
na bancada construída, implementação de modelos, aquisição e tratamento de
dados a partir de instrumentação descrita. Os resultados em malha aberta
mostraram a validade do modelo descrito, mas, para casos onde se requer
maior precisão a dinâmica da folga pode ser considerada a fim de melhorar a
acurácia na aplicação.
Sugerem-se para continuidade deste trabalho as seguintes perspectivas
de pesquisa:
Considerar a dinâmica elétrica do robô;
Implementar testes experimentais em malha fechada (aplicando-se
controles clássicos e/ou outros controladores além da compensação
pela inversa da folga);
98
Modelar e analisar a cinemática de robôs do tipo Gantry e aplicar
controle para trajetórias pega-e-põe (pick-and-place);
Generalizar e validar a modelagem para o segundo grau de liberdade
(ou mais graus) utilizando a placa eletrônica desenvolvida (Apêndice A);
99
6 Referências Bibliográficas
ACRIFLEX. Acoplamento elástico AZ: Acoplamento de Cruzeta. 5 f. Criciúma:
[20 - -?].
ALMEIDA, C. V. R.; OLIVEIRA, A.; CERQUEIRA, J. J. F.; LIMA, A. C. C.
Equipamento para Estimação do Torque em Motores de Indução
Trifásicos pelo Método do Escorregamento Auxiliado pela Análise
Espectral do Sinal de Corrente do Estator - Desenvolvimento e
Implementação. Congresso Brasileiro de Automática (CBA). p. 4283-4288.
Bonito (MS): 2010.
AMIRABADI, M.; BALAKRISHMAN, A.; TOLIYAT, H. A.; ALEXANDER, W. C..
High-Frequency AC-Link PV Inverter. IEEE Transactions on Industrial
Electronics, vol.61, n. 1, p. 281 -291, jan. 2014.
BALLUFF, GMbH. Catálogo Transdutor Micropulso.30 f. Alemanha: [20 - -?].
BASSANEZI, R. C. Ensino-Aprendizagem com Modelagem Matemática:
Uma Nova Estratégia. 3. ed. São Paulo: Contexto, 2006.
BAVARESCO, D. Modelagem Matemática e Controle de um Atuador
Pneumático. 2007. 107 f. Dissertação (Mestrado em Modelagem Matemática)
– UNIJUÍ. Ijui, 2007.
BEBEK, Ö.; HWANG, M. J.; ÇAVUŞOĞLU, M. C. Design of a parallel Robot for
Needle-Based Interventions on Small Animals. IEEE/Asme Transactions On
Mechatronics, v. 18, n. 1, p. 62-73. fev. 2013.
BRITO, L. C.; LAMIM FILHO, P. C.; BRITO, J. N. Study of the Influence of
Frequency Inverters in Electric Motor Drive Through Technical Predictive.
22nd International Congress of Mechanical Engineering (COBEM 2013).
Ribeirão Preto, São Paulo, p. 9554-9561.
CANUDAS DE WIT, C.; OLSSON, H.; ÅSTRÖM, K. J.; LISCHINSKY, P. A New
Model for Control Systems with Friction. IEEE Transactions on Automatic
Control, [s.l], vol. 40, n. 3, p. 419-425, mar. 1995.
100
CHEVALLEREAU, C.; BENACHENHOU, M.-R.; LEBSTARD, V.; BOYER, F. E..
Sensor-Based Control of Underwater Robot Groups. IEEE Transactions on
Robotics, v. 30, p. 604-618. jun. 2014.
CONTRERAS, A. C.; FLORES, E. A. P.; SILVA, R. O.. Multiplicador Electrónico
para Encoder Incremental, Polibits, [online], n.38, pp. 63-67, 2008.
DAVIDSON, J. K.; HUNT, K. H. Robots and Screw Theory: Applications of
Kinematics and Statics to Robotics. OXFORD: New York, 2004.
DOUAT, L. R.; QUEINNEC, I.; GARCIA, G.; MICHELIN, M.; Identification and
Vibration Attenuation for the Parallel Robot Par2. IEEE Transactions On
Control Systems Technology, Vol. 22, No. 1, 2014.
DUPONT, P.; ARMSTRONG, B.; HAYWARD, V. Elasto-Plastic Friction
Model: Contact Compliance and Stiction. Proceending of the American
Control Conference, Chicago, Illinois – EUA, p. 1072-1077, jun. 2000.
DURDEVIC, P.; YAN, Z. Hybrid Control of a Two-Whelled Automatic-Balacing
Robot with Backlash Feature. IEEE International Symposium on Safety,
Security and Rescue Robotics (SSRR), p. 1-6, out. 2013.
DWIVEDULA, R. V.; PAGILLA, P. R. Effect of Backlash on Web Tension in
Roll-to-Roll Manufacturing Systems: Mathematical Model, Mitigation Method
and Experimental Evaluation. IEEE International Conference on Control
Applications (CCA), [s.l], p. 1087-1092, ago. 2013.
FIORI, A. F. ; MARASCHIN, L. B. ; VALDIERO, A. C. ; RASIA, L. A. .
Desenvolvimento de um Robô Gantry Acionado por Motores de Corrente
Alternada. Congresso Nacional de Engenharia Mecânica (CONEM),
Uberlândia, Minas Gerais, ago. 2014a.
FIORI, A. F.; VIECELLI, S. E. ; MARASCHIN, L. B. ; GARLET, I. B.;
VALDIERO, A. C.; RASIA, L. A. Modelagem Matemática da Transmissão
Mecânica em uma Junta Robótica com Fuso de Esferas. Congresso
Nacional de Matemática Aplicada à Indústria (CNMAI), Caldas Novas, Goiás,
nov. 2014b.
GARCIA-VALDOVINOS, L. G.; PARRA-VEGA, V. Experimental Issues of
Finite Time Compensation of Dynamic Friction for Robots. Proceedings of
the American Control Conference, Denver, Colorado – EUA, p. 3275-3280, jun.
2003.
GOMES, L. Programador de Robô Scorbot – Er III. 29 f. São Paulo:
CEETEPS, 2000.
101
GRAMI, S.; GHARBIA, Y. GMS Friction Compensation in Robot Manipulator.
39th Annual Conference of the IEEE Industrial Electronics Society (IECON
2013). Vienna, Áustria, p. 3555-3560, nov. 2013.
HANIFZADEGAN, M.; NAGAMUNE, R.. Tracking and Structural Vibrtion
Control of Flexible Ball-Screw Drives with Dynamic Variations. IEEE/ASME
Transactions on Mechatronics, v. 30, p. 133-142, fev. 2015.
KARNOPP, D. Computer Simulation of Strick-Slip Friction in Mechanical
Dynamic Systems. Journal of Dynamic Systems, Measurement and Control,
vol. 107, p. 100-103, mar. 1985.
KERMORGANT, O.; CHAUMETTE, F. Dealing with Constraints in SensorBased Robot Control. IEEE Transactions on Robotics, v. 30, n. 1, p. 244-257,
fev. 2014.
KINZEL, G. L.; WALDRON, K.J. Kinematics, Dynamics, and Design of
Machinery. 2 ed. Danvers (MA-EUA): Wiley, 2004.
LIN, C.-J.; YAU, H.-T.; TIAN, Y.-C. Identification and Compensation of
Nonlinear Friction Characteristics and Precision Control for a Linear Motor
Stage. IEEE/ASME Transactions on Mechatronics, v. 18, n. 4, p. 1285-1396,
ago. 2013.
MENUZZI, O. Modelagem Matemática da Não Linearidade de Folga de uma
Transmissão Mecânica Tipo Fuso. 2011. 86 f. Dissertação (Mestrado em
Modelagem Matemática) – UNIJUÍ. Ijuí, 2011.
MIOTTO, F. E. M. Modelagem Matemática da Dinâmica do Atrito e sua
Aplicação no Controle Ótimo de um Atuador Hidráulico. 2009. 110 f.
Dissertação (Mestrado em Modelagem Matemática) – UNIJUÍ, Ijuí, 2009.
NOF, S. Y. Handbook of Industrial Robotics. 2 ed. Wiley-Interscience: New
York, 1999.
NORDIN, M.; GUTMAN, P.-O. Contolling Mechanical systems with backlash – a
Survey. Automatica Elsevier, p. 1-33, jan. 2000.
PAATZ, S.. Anatomy of a Robot. Engineering & Technology. p.42-44. 2008
PADOIN, E. Modelagem Matemática da Dinâmica da Não Linearidade de
Folga em uma Junta Rotativa de um Robô Scara com Transmissão por
Engrenagens. 2011. 94 f. Dissertação (Mestrado em Modelagem Matemática)
– UNIJUÍ. Ijuí, 2011.
102
PHUNONG, T. T..; OHISHI, K..; YUKI, Y.;MITSANTISUK, C.. FPGA-Based
High-Performance Force Control System With Friction-Free and Noise-Free
Force Observation. IEEE Transactions On Industrial Electronics, [s.l], vol.
61, n. 2, fev. 2014.
PIERROT, F.; TARBOURIECH, S. Identification and Vibration Attenuation for
the Parallel Robot Par2. IEEE Transactions on Control Systems
Technology, v. 22, n.. 1, jan. 2014.
PO-NAGEN, W. .Real-time Inter-processing for PC Based Robot Controllers in
Tele-robotic and Gantry Robotic Controller System. International Conference
on Robotics and Biomimetics. Bangkok, Thailand, p. 1585-1589, fev. 2009.
PÖRSCH, M. R. M. H.. Modelagem Matemática e Controle Proporcional de
uma Bancada Acionada Pneumaticamente para Simulação de Terrenos
Inclinados. 2012. 83 f. Dissertação (Mestrado em Modelagem Matemática) –
UNIJUÍ. Ijuí, 2012.
RASIA, L. A. Relatório Interno NIMASS. Unijuí: Panambi (RS), 2015.
REIS, A. L. E.; QUEIROZ, F. P.;BALDIOTI, H. R.;OLIVEIRA, J. G. Controle De
Torque e Velocidade de uma Máquina Elétrica para Sistemas Mecânicos
Rotativos. Congresso Brasileiro de Automática (CBA). p. 5174-5179. Campina
Grande (PB): 2012.
RITTER, C. S. Modelagem Matemática das Características Não Lineares de
Atuadores Pneumáticos. 2010. 87 f. Dissertação (Mestrado em Modelagem
Matemática) – UNIJUÍ. Ijuí, 2010.
ROMANO, V. F. (Ed.). Robótica Industrial: aplicação na indústria de
manufatura e de processos. São Paulo: Edgard Blücher, 2002.
SANCA, A. S. Controle com Compensação de Atrito para Estruturas de
Base Móveis de Robôs Manipuladores. 117 f. Dissertação (Engenharia
Elétrica – UFBA), Departamento de Engenharia Elétrica. Salvador, 2006.
SANTOS, C. S. Modelagem Matemática de um Robô Pneumático com Dois
Graus de Liberdade. 2014. 105 f. Dissertação (Mestrado em Modelagem
Matemática) – UNIJUÍ. Ijuí, 2014.
SCIAVICCO, L.; SICILIANO, B. Modeling and Control of Robot
Manipulators. McGraw-Hill: Singapore, 1996.
SHANG, W.; CONG, S.. Motion Control of Parallel Manipulators Using
Acceleration Feedback. IEEE Transaction on Control Systems Technology,
vol. 22, n. 1. p. 314-321. jan. 2014.
103
SHEN, J.-C.; LU, Q.-Z.; WU, C.-H.; JYWE, W.-Y.. Sliding-Mode Tracking
Control With DNLRX Model-Based Friction Compensation for the Precision
Stage. IEEE/ASME Transactions on Mechatronics, v.19, n. 2, p. 788-797,
abr. 2014.
SHIMADA, N.; YOSHIOKA, T.; OHISHI, K.; TOSHIMASA, M.; YOKOKURA, Y..
Reliable Force-sensorless Contact Detection Method for Ball Screw Drive
Cartesian Robot. IEEE International Symposium on Industrial Electronics
(ISIE), Taipei, Taiwan, p. 1-6, mai. 2013.
SHIMADA, N.; YOSHIOKA, T.;OHISHI, K. TOSHIMASA, M. YOKOKURA, Y.
Reliable Force-Sensorless Contact Detection Method for Ball Screw Drive
Cartesian Robot, IEEE International Symposium on Industrial Electronics
(ISIE 2013), Taipei, Taiwan, p. 1-6, mai. 2013.
SLOTINE, J.-J. E.; LI, W.Applied Nonlinear Control. Prentice Hall: New
Jersey, 1991.
TANAKA, Y.; SAKAMA, S.; NAKANO, K.; KOSODO, H.. Comparative Study
on Dynamic Characteristics of Hydraulic, Pneumatic, and Electric Motors.
Symposium on Fluid Power & Motion Control (FPMC), Sarasota, Florida - EUA,
p. 1-6, out. 2013.
TAO, G.; KOKOTOVIĆ, P. V. Continuous-Time Adaptive Control of Systems
with Unknown Backlash. IEEE Transactions on Automatic Control. v. 40, n.
6, p. 1083-1087, jun. 1995.
TREVISAN, R. Utilização de Medições Ultrassônicas de Vibração e
Emissão Acústica para Implantação de Lubrificação Base-condição
Visando à Prevenção de Falhas em Mancais de Rolamentos. Dissertação
(Mestrado em Engenharia de Minas, Metalúrgica e de Materiais) Escola de
Engenharia da UFRGS, Porto Alegre, Rio Grande do Sul. 2010.
TSAI, Lung-Wen. Robot Analysis: The Mechanics of Serial and Parallel
Manipulators. Wiley-Interscience: New York, 1999.
VALDIERO, A. C. Modelagem Matemática de Robôs Hidráulicos. Ijuí: Unijuí,
2012.
VICELLI, S. E. B. Modelagem Matemática do Atuador Pneumático de uma
Bancada para Ensaio de Estruturas. 2014. 94 f. Dissertação (Mestrado em
Modelagem Matemática) – UNIJUÍ. Ijuí, 2014.
VOLDÁN. I. J.. Use Encoder Speed Sensors for the Calculation of Torque
Moment. International Carpathian Control Conference (ICCC), High Tatras,
Polônia, p. 768-771, mai. 2012.
104
VON LINSINGEN, I. Fundamentos de Sistemas Hidráulicos. 2. ed.
Florianópolis: UFSC, 2003
VUKOBRATOVIĆ, M.; POTKONJAK. Applied Dynamics and CAD of
Manipulation Robots. Springer-Verlag: Berlin, 1985.
WANG, H.; KONG, H.; MAN, Z.; TUAN, D. M.; CAO, Z.; SHEN, W. Sliding
Mode Control for Steer-by-Wire Systems With AC Motors in Road Vehicles.
IEEE Transactions on Industrial Electronics, [s.l], v. 61, n. 3, p. 1596-1611,
mar. 2014.
WEG, CFW10. Manual do Usuário: Inversor de Frequência. 111 f. [s.l.:20 - -?].
YANG, T.; YAN, S. HAN, Z.; Nonlinear model of space manipulator joint
considering time-variant stiffness and backlash. Journal of Sound and
Vibration. v. 341. p. 246-259, jan. 2015.
ZHANG, H.; ZHAO, W.; ZHANG, J.; LIU, H. Research on the Modeling of
Dynamics for Vertical Axis Ball Screw Feed System. IEEE International
Symposium on Assembly and Manufacturing (ISAM), Xi'an, China, p.208213, ago. 2013.
ZHU, H.; FUJIMOTO, H. Proposal of Nonlinear Friction Compensation
Approach for a Ball-Screw-Driven Stage in Zero-Speed Region including NonVelocity-Reversal Motion. 39th Annual Conference of the IEEE Industrial
Electronics Society (IECON 2013). Vienna, Áustria, p. 6539-6544, nov. 2013.
105
7 APÊNDICE
106
Apêndice A- Circuito eletrônico e projeto do drive de comando
Figura 56 - Visualização do Projeto da Placa Eletrônica
Fonte: RASIA, 2015.
Figura 57 - Projeto da Placa Eletrônica
Fonte: RASIA, 2015.
107
Figura 58 - Diagrama Esquemático da Placa de Comando
Fonte: RASIA, 2015.
108
Apêndice B – Programa para Ajuste de Curva ao Mapa Estático do Atrito
%programa p calcular parametros estaticos de atrito
%
clear all;
clc
global Fc Fs vs
load dadosgs.mat;
vpg=[];
Fapg=[];
vng=[];
Fang=[];
Fap=Tap;
Fan=Tan;
vpaj=(0:0.0001:0.025);
veaj=(-0.025:0.0001:0);
vajust=[veaj vpaj];
Fc=1.03e4
Fs=1.23e5
vs=0.002
betaLn0=[1];%MATLAB CALCULA APENAS O B
betaLp0=[1];
[betaLp]=nlinfit(vp,Fap,'Fatritoss3',betaLp0)
[betaLn]=nlinfit(vn,Fan,'Fatritoss3',betaLn0)
figure;
plot(vn,Fan,'o',veaj,Fatritoss3(betaLn,veaj),'r',vp,Fap,'o',vpaj,Fatritoss3(betaLp,vpaj),'-r');
grid;
xlabel('Velocidade [m/s]');
ylabel('Força de atrito [N]');
function [y]=Fatritoss3(beta,x);
global Fc Fs vs
y = sign(x).*(Fc + (Fs-Fc)*exp(-(x/vs).^2))+beta(1)*x ;
Download