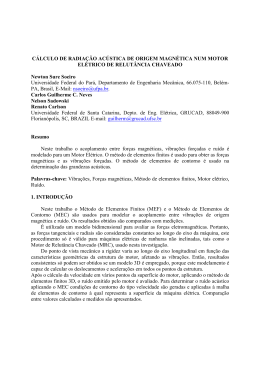
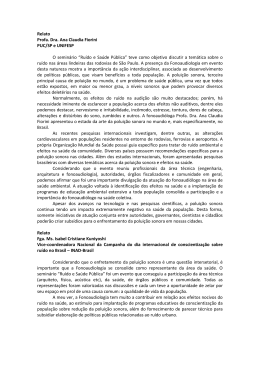
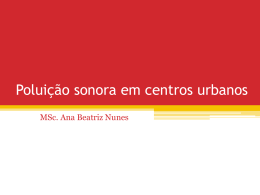
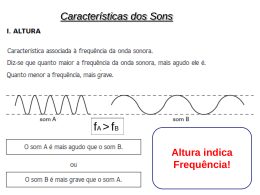
CÁLCULO E AVALIAÇÃO DAS PERDAS NO FERRO E DO RUÍDO ACÚSTICO NO MOTOR DE RELUTÂNCIA CHAVEADO CARLOS G.C. NEVES1, MAURICIO V. FERREIRA DA LUZ2, NELSON SADOWSKI2, RENATO CARLSON2 1 WEG MÁQUINAS 89256-900 Jaraguá do Sul, SC, BRAZIL 2 GRUCAD, Depto. de Eng. Elétrica, Universidade Federal de Santa Catarina P. 0. Box 476, 88049-900 Florianópolis, SC, BRAZIL E-mails: [email protected], [email protected] [email protected], [email protected] Resumo Neste artigo as perdas no núcleo e o ruído de origem magnética num Motor de Relutância Chaveado são calculados e analisados. O Método de Elementos Finitos é usado no cálculo das induções, forças magnéticas e vibrações forçadas. As três componentes da perda no núcleo, isto é, perdas por correntes parasitas, excedentes ou anômalas, e histerese são consideradas. No que se refere às perdas por histerese, analisa-se a influência dos laços menores sobre as mesmas. O Método de Elementos de Contorno é usado no cálculo do ruído acústico. Abstract In this paper iron losses and acoustic noise of magnetic origin in a Switched Reluctance Motor are evaluated and analyzed. The Finite Elements Method is applied to calculate flux densities, magnetic forces and forced vibrations. The three components of total iron losses, i.e., eddy currents, excess or anomalous and hysteresis are considered. Concerning hysteresis losses, the influence of minor loops is here analyzed. The boundary element method is used for acoustic noise computations. Key words Noise; Magnetic Forces; Finite Element Method; Boundary Element Method, Hysteresis, Iron losses, Minor loops, Switched Reluctance Motor. 1 Introdução Vários disposit ivos contendo máquinas elétricas, tais como sistemas de ar condicionado, impressoras e ventiladores têm sido instalados recentemente em ambientes de escritório e domicílios requerendo baixa emissão de ruído audível. Como a conjuntura econômica atual e a competitividade internacional força os fabricantes a usarem menos material ativo nas máquinas elétricas, gerando assim estruturas menos rígidas e densidades de fluxo maiores, as mesmas tornam-se mais sujeitas à emissão de ruído audível e a perdas maiores no núcleo. Assim, as tendências para os próximos anos passam inegavelmente pelos seguintes temas: a) Nível de ruído audível cada vez menor – exige investigação no projeto eletromagnético e no projeto de refrigeração. b) Novos materiais, com menores perdas – permitem a redução da ventilação e, conseqüentemente, do ruído; c) Rendimento cada vez maior – novamente, aperfeiçoamento no projeto e nos materiais são necessários. d) Velocidade Variável – devido ao acionamento com inversores de freqüência, novas concepções de projeto estão sendo desenvolvidas. Materiais magnéticos com menores perdas em altas freqüências passam a ser importantes. É de fundamental importância o desenvolvimento de materiais isolantes de melhores características. Estas tendências encorajam o projetista de máquinas elétricas ao uso de ferramentas computacionais de análise e de determinação de ruído e perdas. Porém, as técnicas e procedimentos atualmente empregados na indústria não são ideais. Daí a necessidade do desenvolvimento e utilização de técnicas numéricas e procedimentos experimentais avançados e precisos de determinação de ruído e perdas em máquinas elétricas visando o contínuo aperfeiçoamento dos produtos. O estudo das perdas embora tenha sido objeto de investigação por mais de 70 anos, ainda apresenta dificuldades consideráveis; já que todos os métodos são baseados em modelos simplificados, e geralmente difíceis de serem aplicados, seja por causa dos parâmetros empíricos relacionados ao tipo de material, ou pela necessidade de um conhecimento rigoroso de todo o espectro harmônico da indução. Assim, em termos de estado da arte, busca-se desenvolver modelos mais representativos e gerais, e que não sejam tão dependentes de parâmetros empíricos. O ruído em máquinas elétricas, da mesma forma que as perdas, tem sido investigado por várias décadas, porém algumas dúvidas persistem ao longo dos anos bem como as abordagens analíticas de modelagem não permitem a obtenção de resultados satisfatórios, já que utilizam fórmulas baseadas em geometrias simplificadas, tanto no aspecto das variáveis eletromagnéticas, como das variáveis mecânicas. Assim em termos de estado da arte, busca-se utilizar métodos numéricos, tais como, o Método de Elementos Finitos (MEF) e o Método de Elementos de Contorno (MEC). O Motor de Relutância Chaveado (MRC) devido a sua tendência natural à emissão de valores elevados de ruído audível, é freqüentemente objeto de estudos de redução do mesmo. Geralmente estes estudos buscam otimizar a estrutura do MRC, bem como a forma de alimentação, porém estes estudos não são válidos se não forem levados em conta os efeitos sobre o rendimento do mesmo, neste ínterim rotinas de avaliação de perdas tornam-se fundamentais. Assim, neste artigo, métodos de avaliação de ruído e perdas são apresentados e aplicados a um MRC comercial. Acrescentando as perdas por correntes parasitas W f e excedentes W e , as perdas totais podem ser expressas por: 2 Perdas no ferro onde k f e k e , são os coeficientes de perdas por As perdas totais no ferro são resultado da soma das componentes por perdas histeréticas, excedentes ou anômalas e por correntes parasitas (Atallah et al., 1992). As componentes por correntes parasitas, bem como as componentes por perdas excedentes são derivadas no tempo da indução magnética e sua avaliação não é particularmente difícil. Por outro lado, a componente devido a histerese, dada pelo somatório das áreas das superfícies internas da curva B = f (H) (Fig. 1), requer modelos complexos e de tempo de processamento elevado, como os modelos de Jiles-Atherton e Preisach’s (Boglietti et al., 1996). Devido à complexidade das estruturas das máquinas elétricas, modelos simplificados para cálculo da perda por histerese são preferíveis. Um destes modelos é dado por (1) (Atallah,1992; Lavers, 1978; Mueller, 1975): Wh = kh 1 α β n Bm 1 + ∑ ∆Bi [W / kg ] T Bm i =1 (1) onde k h é o coeficiente de perdas por histerese, T e B m são o período elétrico e o valor de pico da indução magnética; α e β são coeficientes que dependem das características do ferro. Para levar em conta os laços menores (Fig. 1), efetua-se a soma feita em (1) para as n reversões de densidade de fluxo ∆B i . Estas reversões de densidade de fluxo podem existir nas máquinas elétricas devido à estrutura magnética e/ou a maneira pela qual são alimentadas. As ∆B i são calculadas através do método conhecido como “Rain-flow” (Dowling, 1972). Este método é vantajoso porque evita a decomposição harmônica e ainda é valido para ondas de B não – periódicas. W = kh + ke 2 1 α β n 1 T ∂ B m 1 + ∆ B + k B ∑ i dt ∫ f T T 0 ∂t B m i =1 1 T ∂ B ∫ T 0 ∂t 32 dt [W / kg ] (2) correntes parasitas e de perdas excedentes, respectivamente. De acordo com (2), o cálculo de perdas no ferro requer a determinação das distribuições espaciais e temporais de B . Neste trabalho, as densidades de fluxo magnético no ferro são obtidas através do Método de Elementos Finitos passo a passo no tempo e a rotação é simulada por meio de uma Banda de Movimento no entreferro (Sadowski et al., 1992a). Nas técnicas numéricas desenvolvidas as derivadas no tempo em (2) são calculadas a partir das componentes radiais e tangenciais da indução, Br e Bθ , respectivamente, por meio das seguintes relações: 2 ∆Br2 + ∆Bθ2 ∂B = ∂t ∆t 2 ∂B ∂t 1. 5 ∆B = r ∆t 2 ∆B + θ ∆t (3) 2 34 (4) onde ∆t é o passo de cálculo no tempo; ∆Br e ∆Bθ são a variação radial e tangencial das componentes da indução magnética, respectivamente. O valor de pico da indução B m é calculado a partir do módulo dos componentes da indução radial e tangencial. A Fig. 2 mostra a estrutura de um MRC comercial com 8/6 pólos. A parte da máquina mostrada corresponde ao domínio de estudo, sendo que a distribuição de fluxo representada é relativa à excitação de uma fase. Figura 2. Estrutura de um MRC e linhas de fluxo para uma fase excitada. Figura 1. Laços de histerese. As perdas no núcleo foram analisadas para o motor operando em diferentes velocidades e com apenas uma fase excitada. A fim de determinar as condições de ocorrência de laços menores de histerese, duas fontes foram consideradas: uma de corrente contínua e outra também de corrente contínua, mas somada a uma modulação em forma de dente de serra com amplitude igual a 66% do valor da corrente contínua. A Fig. 3 mostra a variação da densidade de fluxo no dente do motor versus o tempo de um período elétrico de rotação do rotor. No primeiro caso não há reversões de B, no entanto para o segundo caso há tantos “picos e quedas” quanto os existentes na modulação da corrente. Observa-se, portanto, que as reversões B tem origem somente na fonte de alimentação da máquina. Para avaliar a influência dos laços menores causados pelas reversões B, as perdas por histerese são calculadas usando a equação (1), sendo que ora β assume um valor igual a zero (laços menores desprezíveis) e ora β é diferente de zero (laços menores são levados em conta). Estes resultados, apresentados na Tabela 1, foram obtidos para uma velocidade de rotação de 2000 rpm. df ds = 1 µ0 1 2 (n ⋅ B)B − 2 B n (5) onde µ 0 é a permeabilidade do ar, n é um vetor normal a superfície do dente estatórico (aço) e B é a indução no entreferro (ar). Para simplificar o problema, as densidades de força ao longo do estator são integradas e supostas concentradas num ponto central da superfície interna do dente estatórico. Após uma decomposição harmônica, as forças magnéticas obtidas através do cálculo eletromagnético bidimensional são transferidas ao modelo tridimensional, mostrado na Fig. 4, que representa a estrutura do motor, supondo que estas agem em planos axiais eqüidistantes. Na mesma figura são apresentados os vetores de força correspondentes à 5ª harmônica de forças. Tabela 1. Laço de Histerese com ou sem Laços Menores. Sem laços menores ( β=0) 30.2 w Com laços menores (β≠0) 46.4 w Estes resultados mostram que os laços menores podem originar um aumento de perda por histerese considerável. No caso deste exemplo, esse aumento atinge 50%. Densidade de Fluxo Be[Tesla] Flux density B [T sla] ___ Corrente CC DC current ____ ---- Corrente CC+Modulação -------- DC Current + ripple Figura 4. Vetores de força correspondentes à 5ª harmônica aplicados a estrutura do MRC. 3.2 Resposta Forçada Com as forças e o modelo mecânico, as vibrações forçadas são obtidas usando Método de Superposição Modal. Neste método a resposta de uma estrutura contínua a qualquer força pode ser representada pela superposição das respostas de seus modos individuais. Estas respostas podem ser deslocamentos nodais, velocidades e acelerações. Como exemplo, a deformação forçada causada pelo 5º harmônico das forças magnéticas (1250 Hz) é apresentada na Fig. 5. TTempo i m e [ s[s] ] Figura 3. Variação da densidade de fluxo em um dente durante a rotação. 3 Ruído Acústico 3.1 Cálculo das Forças e Modelo Mecânico O Tensor de Maxwell é usado neste trabalho para calcular a pressão magnética df ds , como segue (Sadowski et al., 1992b). Figura 5. Deformação causada pelo 5º harmônico das forças magnéticas (1250 Hz). 3.3 Cálculo do Ruído pelo MEC Este método é aplicado para resolver a equação de onda acústica quando o domínio acústico é irregular ou arbitrário. O MEC, só discretiza a superfície da estrutura ou limite de domínio acústico. A pressão sonora em um ponto arbitrário p de um meio exterior Γ, que envolve uma superfície S, assumindo vibração harmônica desta superfície, tem que satisfazer a equação de Helmholtz (Kinsler, 1982): ∇2 p + k 2 p = 0 (6) A multiplicação de ambos os lados de (6) pela solução fundamental G (x, ξ ) e a integração do produto sob Γ resulta na equação integral seguinte (Ciskowski, 1992). C (ξ )p(ξ )+ ∫ p(x) S ∂G (x, ξ ) dS = ∂n ∫ S ∂p(x ) G (x, ξ )dS ∂n (7) Onde x é um ponto da superfície, ξ é um ponto sobre Γ, G (x, ξ )= e −i ( kr ) 4πr e r é a distância de x à ξ. Dividindo a superfície em N elementos, cada um com uma superfície S j ( j = 1, N ) e posicionando ξ em um nó l , (7) pode ser discretizada, dando: C (ξl )p(ξl )+ N N ∂G ∑ ∫ p( x) ∂n (x,ξ )dS = ∑ ∫ l j =1 S j j =1 S j ∂p( x) G(x,ξl )dS ∂n (8) A equação (8) que relaciona as pressões superficiais às velocidades normais pode ser escrita na forma de matriz (Ciskowski, 1992): [H ]{p s }= [B]{V n } (9) Onde [H ] e [B ] são matrizes (cheias, complexas não simétricas) onde {p s }e {V n } são vetores e pressão superficiais e velocidades normais nos nós, respectivamente. As matrizes [H ] e [B ] dependem da freqüência de excitação e da forma da estrutura. A partir de (9) e de condições de contorno adequadas (envolvendo um determinado valor de velocidade normal na superfície de contorno, correspondente ao comportamento vibratório da estrutura), as pressões nodais superficiais {p s } podem ser calculadas. O conhecimento destas pressões e das velocidades normais permite criar uma representação discreta da pressão p f em qualquer ponto do meio exterior Γ: { }T {p s }+ {b f }T {Vn } (10) {h f }e {b f }são os coeficientes de influência p f = hf onde que dependem da geometria do modelo e das freqüências de excitação. Obtido o p f , o nível de pressão sonora pode ser L p = 20 log pf [dB] p ref (11) onde p ref = 2 x10 −5 N / m 2 . A potência sonora irradiada por uma estrutura vibrante pode ser obtida a partir das pressões superficiais {p s } e das velocidades normais {V n } na superfície de contorno S através de: W rad = 1 Re {p s }T {V n }* ds 2 S ∫ (12) onde Re{} refere-se a parte real enquanto que o asterisco refere-se ao complexo conjugado e ds é a superfície incremental. A discretização em elementos de contorno permite formular a potência irradiada como a soma das contribuições de cada elemento de superfície S j : W rad = m ∑ Wrad j =1 (13) j Onde m é o número de elementos de contorno (elementos superficiais triangulares ou retangulares) e W rad j 1 * = Re p s j V n j ds 2 S j ∫ (14) O fluxograma da Fig.6 mostra a metodologia de cálculo dos parâmetros acústicos: eficiência de radiação, potência sonora e pressão sonora. Geometric Geometria e Properties Dados and Data Cálculo Structural Estrutural Calculation Mesh Geração da Malha Generation Numeric Modal Análise Modal Numérica Analysis Harmonic Analysis Análise Harmônica (Modal Superposition (Superposição Modal) Method) Cálculo Acoustic Acústico Calculation Malha Boundary Acústica Elements Mesh Velocity CondiçõesB.C de Generation Contorno Velocidade Análise de Radiation Radiação Analysis Acoustic Parâmetros Parameters Acústicos Determination calculado através de: Figura 6. Fluxograma representando os cálculos estruturais e acústicos. Os resultados estruturais que geram as condições de contorno são obtidos nos nós de uma malha estrutural (com elementos tetraédricos e hexaédricos) diferente da malha acústica, mas ambas possuem a mesma geometria. Neste caso, um algoritmo de interpolação é usado para transferir os resultados para a malha acústica. 4 Resultados Figura 9. Malha acústica e coordenadas Cartesianas da pressão sonora nos pontos de medição. Como exemplo de cálculos acústicos aplicando o MEC, apresentamos na Fig. 7 a pressão sonora e as condições de contorno de velocidade causadas pela 5a harmônica (1250 Hz) das forças magnéticas (para fins de ilustração, este resultado foi calculado considerado uma distância de 0,3 metros da fonte). A Fig. 8 mostra a eficiência de radiação como função das freqüências de excitação. Velocidade (dB) e Pressão (dB) Figura 7. Pressão sonora causada pela 5a harmônica (1250 Hz) das forças magnéticas e condições de contorno velocidade. Observando as tabelas 2 e 3 nota-se que os valores calculados através do MEC e os valores medidos são relativamente próximos nos pontos 1 e 2, para as freqüências de 1250 Hz e 1750 Hz, entretanto para a freqüência de 1500 Hz os valores medidos são bem superiores aos calculados. Estes valores elevados provavelmente são causados por fenômenos de origem aerodinâmica, tais como os efeitos de turbulência, já que para esta freqüência em particular não são observados picos de vibração importantes. Os efeitos de turbulência são causados pela interrupção repentina do fluxo de ar pelo rotor [Engelmann, 1995]. A freqüência associada com este tipo de ruído aerodinâmico é dada pelo produto do número de dentes do rotor pela velocidade rotacional do mesmo em rps, neste caso (6x250=1500 Hz). Observando as tabelas 4 e 5 nota-se que os valores de pressão sonora medidos são maiores do que os calculados através do MEC. Provavelmente, estes valores elevados são provocados por fenômenos de origem aerodinâmica, tais como, ventilação, transmissão de vibrações dos rolamentos para as tampas do motor e também por fenômenos de origem magnética, como vibrações causadas por forças magnéticas de cabeça de bobina. Todos estes efeitos, os quais predominam na direção perpendicular as tampas do motor, não são incorporados na modelagem apresentada neste artigo. Os resultados dos cálculos acústicos poderiam ser melhorados se fossem levadas em conta as forças magnéticas que são exercidas na direção axial, porém para isto, seria necessário um modelo tridimensional de cálculo de campos. Tabela 2. Valores de Pressão Sonora no Ponto 1. Freqüência (Hz) Figura 8. Eficiência de Radiação em função da freqüência. As tabelas 2, 3 ,4 e 5 comparam os níveis de pressão sonora calculados com os valores medidos nos pontos 1, 2, 3 e 4 (mostrados na Fig. 9, a qual representa a malha acústica) para as freqüências de excitação de 1250 Hz, 1500 Hz e 1750 Hz, respectivamente, considerando a distância de 1 metro da fonte e a velocidade de 2500 rpm. 1250 1500 1750 Pressão sonora calculada [dB(A)] 55.06 46.04 57.30 Pressão sonora medida [dB(A)] 54.01 65.81 55.08 Tabela 3. Valores de Pressão Sonora no Ponto 2. Freqüência (Hz) 1250 1500 1750 Pressão sonora calculada [dB(A)] 59.10 39.30 65.01 Pressão sonora medida [dB(A)] 60.00 69.13 61.00 Tabela 4. Valores de Pressão Sonora no Ponto 3. Freqüência (Hz) 1250 1500 1750 Pressão sonora calculada [dB(A)] 21.05 39.80 36.42 Pressão sonora medida [dB(A)] 52.00 59.25 47.00 Tabela 5. Valores de Pressão Sonora no Ponto 4. Freqüência (Hz) 1250 1500 1750 Pressão sonora calculada [dB(A)] 19.90 39.50 35.62 Pressão sonora medida [dB(A)] 60.60 62.58 61.00 5 Conclusões Metodologias de cálculo de ruído acústico e perdas no ferro em máquinas elétricas foram apresentadas e aplicadas a um MRC 8/6 pólos. No tocante ao cálculo de ruído, considerando a complexidade de todo o procedimento de cálculo e as simplificações efetuadas, podemos considerar que os resultados validam esta análise de predição de ruído acústico causado por forças magnéticas. No aspecto de perdas no ferro, foi mostrado que laços menores de histerese podem ser gerados por ripples na fonte de alimentação e aumentam significativamente as perdas por histerese. Referências Bibliográficas Atallah, K., Zhu, Z., Q., Howe, D. (1992). An improved method for predicting iron losses in brushless permanent magnet DC drives, IEEE Transactions on Magnetics, vol. 28, N.5, pp. 2997-2998. Boglietti, A., Bottauscio, O., Chiampi, M., Pastorelli, M., Repetto, M. (1996). Computation and measurement of iron losses under PWM supply conditions, IEEE Transactions on Magnetics, vol.32, N.5, pp. 4302-4304. Ciskowski, R. D. and Brebbia, C. A. (1991). Boundary Element Methods in Acoustic, Computational Mechanics Elservier Applied Science, Southampton Boston. Dowling, N. E. (1972). Fatigue failure predictions for complicated stress-strain histories, J. Materials, N.7, pp. 71-87. Engelmann, R. H, Middendorf, W. H. (1995). Handbook of Electric Motors, Marcel Dekker Inc., New York. Kinsler, L. E. (1982). Fundamentals of Acoustics, John Wiley & Sons. Lavers, J. D., Biringer, P. P., Hollitscher, H. (1978). A simple method of estimating the minor loop hysteresis loss in thin laminations, IEEE Transactions on Magnetics, vol. 14, N.5, pp. 386388. Mueller, M. A., Williamson, S., Flack, T. J., Atallah, K., Baholo, B., Howe, D., Mellor, P.H. (1995). Calculation of iron losses from time stepped finite element models of cage induction machines, IEE Electrical Machines and Drives Conference Proceedings, N.412, pp. 88-92. Neves, C. G. C., Carlson, R., Sadowski, N., Bastos, J. P. A., Soeiro, N. S. (1999). Forced Vibrations Calculation in a Switched Reluctance Motor Taking into Account the Viscous Damping, Conference Record of the IEEE-IEMDC International Electric Machines and Drives Conference, Seattle (USA), pp. 110-112. Sadowski, N., Lefèvre, Y., Lajoie-Mazenc, M., Cros, J. (1992a). Finite element torque calculation in electrical machines while considering the movement, IEEE Transactions on Magnetics, vol. 28, N.2, pp. 1410-1413. Sadowski, N., Lefèvre, Y., Lajoie-Mazenc, M. and Bastos, J. P. A. (1992b). Sur le calcul des forces magnétiques, Journal de physique III, France, pp. 859-870.
Download