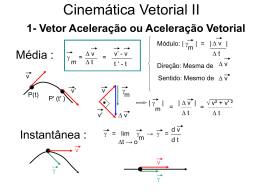
Capítulo 3 – Movimento em Duas ou Três Dimensões 3.1 – Vetor posição e vetor velocidade objeto de nosso estudo sistema o observador sistema de referência . O ponto de referência O O O trajetória O objeto de nosso estudo sistema modelo: “partícula” O Coordenadas cartesianas: r xiˆ yˆj zkˆ Vetor posição r (t ) O Vetor posição r (t ) O t r (t ) vetor posição da partícula no instante t em relação ao observador em O. O Vetor deslocamento r r (t t ) r (t ) Vetor deslocamento da partícula entre os instantes t e t +Δt t r (t ) O r r ( tt ) Componentes: tt r xiˆ y ˆj z kˆ r r (t t) r (t) r final r inicial r AB r B r A r BC r C r B r AC r C r A 0 A C rAB rBC B r vm t Velocidade média r (t ) O r r ( tt ) Componentes: vm secante à trajetória x ˆ y ˆ z ˆ vm i j k t t t Velocidade instantânea t r (t ) O r t decrescente vm t decrescente r decrescente t r (t ) r r v lim t 0 O t vm tangente à trajetória no instante considerado v (t ) v (t2 ) t r (t ) O v ( t1 ) v v (t3 ) tangente à trajetória Em termos das componentes: r dr dx ˆ dy ˆ dz ˆ v lim i j k t 0 t dt dt dt dt dx dy dz vx , v y , vz dt dt dt Módulo do vetor velocidade: v vx2 v y2 vz2 (igual à velocidade escalar) 3.2 – Vetor aceleração v Aceleração média: am t v dv Aceleração instantânea: a lim t 0 t dt Componentes: dvx ˆ dvy ˆ dvz ˆ a i j k dt dt dt dvy d 2 y dvx d 2 x dvz d 2 z ax 2 , ay 2 , az 2 dt dt dt dt dt dt Componentes perpendicular e paralela da aceleração: Componente perpendicular t a v ( t t ) v( t ) a|| v Componente paralela v( t ) a (t ) v ( t t ) d v v a d t t Componente paralela da aceleração altera o módulo da velocidade v a t a e v são paralelos v (t ) v at v (t t ) apenas o módulo da velocidade é alterado! v (t ) Componente perpendicular da aceleração altera a direção da velocidade v (t ) v v (t t ) a v (t t ) No limite t 0 , a aceleração torna-se perpendicular à velocidade v (t ) v v (t t ) a v (t ) Componente perpendicular da aceleração altera a direção da velocidade v (t ) v v (t t ) a v (t t ) No limite t 0 , a aceleração torna-se perpendicular à velocidade v (t ) v (t t ) v a v (t ) Componente perpendicular da aceleração altera a direção da velocidade v (t ) v v (t t ) a v (t t ) No limite t 0 , a aceleração torna-se perpendicular à velocidade v (t ) v (t t ) v a v Exemplos Aceleração normal à trajetória: velocidade escalar é constante a v a Componente paralela da aceleração normal no mesmo sentido da velocidade: velocidade escalar aumenta v a Componente paralela da aceleração normal no sentido oposto da velocidade: velocidade escalar diminui 3.3 – Movimento de um projétil • Movimento de um corpo no campo gravitacional da Terra, desprezando os efeitos de resistência do ar, curvatura e rotação da Terra. • Movimento ocorre em um plano, definido pelo vetor velocidade inicial e pela vetor aceleração da gravidade a a gˆj a x 0, a y g v0 v0 x iˆ v0 y ˆj 0 v0 x v0 cos 0 , v0 y v0 sen 0 Decomposição do movimento • Movimento horizontal com velocidade constante • Movimento vertical com aceleração constante a 0 v0 x v0 cos 0 a y g (“queda livre”) Demonstração: Kit LADIF 1C-02 Vídeos: “Physics Demonstrations in Mechanics” I.4, I.5, I.6 Vídeo: http://www.youtube.com/watch?v=fwNQKjTj-0w (a partir de 46:10 min) Equações do movimento de projétil v0 x v0 cos 0 • Movimento horizontal com velocidade constante x v0 cos 0 t v y v0 sen 0 gt • Movimento vertical em queda livre 1 2 y v0 sen 0 t gt 2 a 0 Aplicações: 2 2 • Distância até a origem a qualquer instante r r x y 2 2 • Módulo da velocidade a qualquer instante v v v x v y vy • Direção e sentido da velocidade: tg vx y r (t ) vx vy v (t ) x • Equação da trajetória: Sabemos que: x v0 cos 0 t 1 2 y v0 sen 0 t gt 2 x t v0 cos 0 1 x x y v0 sen 0 g v0 cos 0 2 v0 cos 0 2 g 2 y tg 0 x 2 x 2v0 cos2 0 y x A trajetória é uma parábola (resultado obtido pela primeira vez por Galileu) • Altura máxima: Obtemos o tempo t1 para alcançar a altura máxima a partir da condição vy 0 v y v0 sen 0 gt1 0 v0 sen 0 t1 g Então substituimos t1 na equação para y(t ) : 1 2 h y t1 v0 sen 0 t1 gt1 2 v0 sen 0 1 v0 sen 0 g h v0 sen 0 y h v sen 0 h 2g 2 0 x 2 g 2 g 2 Note que a altura será a maior possível para 0 90 • Alcance: 2v0 sen 0 Obtemos o tempo t2 para o projétil retornar ao solo: t 2 2t1 g Então substituimos t2 na equação para x(t ) : R xt2 v0 cos 0 t2 2v0 sen 0 R v0 cos 0 g 2v02 sen 0cos 0 R g y 0 v02 sen 2 0 R g R x Note que o alcance será o maior possível para 0 45 Galileu: “As amplitudes das parábolas descritas por projéteis disparados com a mesma velocidade, mas com ângulos de elevação acima e abaixo de 45o e equidistantes de 45o, são iguais entre si” Demonstração experimental: Kit LADIF (lançador de projéteis) 3.4 – Movimento circular Movimento circular uniforme Movimento ao longo de uma trajetória circular com velocidade escalar constante (velocidade muda apenas de direção): aceleração será sempre perpendicular à velocidade, apontando para o centro do círculo (centrípeta) v v arad R arad arad arad arad v v v2 R Período (T ): Tempo para uma volta completa 2R 4 2 R v , arad T T2 Exemplo: Y&F 3.11 Um carro possui aceleração lateral máxima de 0,96g. Se o carro se desloca a 144 km/h, qual o raio mínimo da curva que ele pode aceitar? v arad R v 144 km/h 40 m/s v2 arad R v2 Rmin amax 40 m/s2 0,96 9,8m/s 2 170m Exemplo: Órbitas dos planetas Raio médio T translação (U.A) (anos) arad 4 2 R T2 (U.A.) R2 arad Mercúrio 0,39 0,24 267,30 40,7 Vênus 0,72 0,62 73,94 38,3 Terra 1 1 39,47 39,5 Marte 1,52 1,88 16,98 39,2 Júpiter 5,20 11,86 1,459 39,5 Saturno 9,54 29,46 0,4340 39,5 Urano 19,19 84,01 0,1073 39,5 Neptuno 30,06 164,79 0,04370 39,5 Plutão 247,70 0,02544 39,7 39,53 Movimento circular não uniforme Além da aceleração radial (centrípeta), existe também uma aceleração tangencial, que causa variações na velocidade escalar 2 arad dv v , atg R dt 3.5 – Velocidade relativa Velocidade depende do sistema de referência (referencial): conjunto de eixos e um cronômetro Em 1D: yA yB xP/A OA xB/A OB xP/B P xA, xB A: referencial de um observador externo, parado na estrada B: referencial de um observador sentado dentro do ônibus xP / A xP / B xB / A Derivando em relação ao tempo, obtemos: dx P / A dx P / B dx B / A dt dt dt vP / A vP / B vB / A Exemplo: vP / B 1m/s vB / A 4 m/s vP / A vP / B vB / A 3 m/s Em 2D e 3D: rP / A yA rP / A rP / B rB / A yB Derivando em relação ao tempo, obtemos: P rP / B OB rB / A OA zA zB xA xB vP / A vP / B vB / A Transformação de velocidades de Galileu Exemplos: Y&F 3.14 e 3.15 Velocidade do avião em relação à Terra: vP / E vP / A v A / E vP / E vP2 / A v A2 / E 260 km/h 100 km/h 23 240 km/h arctg Em que direção o piloto deve inclinar seu avião para ir do Sul para o Norte? 100 km/h arcsen 25 240 km/h Velocidade do avião em relação à Terra: vP / E vP2 / A v A2 / E 218 km/h Próximas aulas: 6a. Feira 26/08: Aula de Exercícios (sala A-327) 4a. Feira 30/08: Aula Magna (sala A-343) e teste do Cap. 3 Avisos: Mudança na data da P2: 2a. Feira 28/11, 17h Testes (valendo até 1,0 ponto na prova): (Media nos testes) 2,0 Bonus na prova 8,0 (Ausências nos testes são computadas como nota zero para o cálculo da média)
Download