Universidade Federal da Paraíba
Programa de Pós-Graduação em Informática
Teoria da Computação – 2013.1
Máquinas de Turing
SIPSER – Capítulo 3: A tese de Church-Turing
Ana Paula Nunes Guimarães
Glauco de Sousa e Silva
Sarah Soares de Oliveira
Professor:Andrei Formiga
Até agora
Autômatos finitos são bons modelos para
dispositivos que têm uma quantidade pequena
de memória
Autômatos com pilha são bons modelos para
dispositivos que possuem memória ilimitada,
desde que
seja utilizada de apenas uma
maneira:
◦ LIFO
Agora veremos um modelo mais poderoso:
◦ Máquinas de Turing (MTs)
2
Máquinas de Turing
Proposta por Alan Turing em 1936
Semelhante a um autômato finito
◦ Mas com memória ilimitada e irrestrita
É um modelo de um computador de propósito
geral
3
Máquinas de Turing
4
Máquinas de Turing
Um detalhe importante é a aceitação, ou
rejeição da entrada
Diferente dos autômatos, ela possui um estado
de aceitação, e outro de rejeição
◦ Ambos necessariamente finais
Quando um destes estados é alcançado, a
computação termina imediatamente
5
Máquinas de Turing
Para entender o procedimento executado por
uma máquina de Turing, vamos considerar a
seguinte linguagem:
◦ L1 = { w#w | w ∈ {0,1}* }
Exemplos de palavras da linguagem L1:
w1=010#010
w2=0011#0011
6
Máquinas de Turing
Algoritmo para reconhecer L = {w#w | w ∈{0,1}*}
1. Faça um zigue-zague ao longo da fita checando
posições correspondentes de ambos os lados
do símbolo # para verificar se elas contêm o
mesmo símbolo. Se a fita não contêm, ou se
nenhum # foi encontrado, então rejeite;
2. À medida que os símbolos vão sendo
verificados, marque-os;
3. Quando todos os símbolos a esquerda de #
forem marcados, verifique se existe algum
símbolo não marcado a direita. Se existir,
rejeite. Se não existir, aceite a entrada.
7
Entrada: 011000#011000
0 1 1 0 0 0 # 0 1 1 0 0 0 □ ...
x 1 1 0 0 0 # 0 1 1 0 0 0 □ ...
x11000#x11000 □
...
x11000#x11000 □
xx1000#x11000 □
...
x x x x x x # x x x x x x x □ ...
aceita
8
Definição formal de uma Máquina de Turing
Uma MT é definida como uma 7-upla:
M = (Q, Σ, Γ, δ, q0, qaceita,qrejeita)
Onde:
◦ Q é o conjunto de estados,
◦ Σ é o alfabeto de entrada sem o símbolo em
branco (□),
◦ Γ é o alfabeto da fita, onde □ ϵ Γ e Σ ⊆ Γ,
◦ δ : Q x Γ→ Q x Γ x {L, R} é a função de transição,
◦ q0 ϵ Q é o estado inicial,
◦ qaceita ϵ Q é o estado de aceitação e,
◦ qrejeita ϵ Q é o estado de rejeição (qaceita ≠ qrejeita ).
9
Iniciando uma Máquina de Turing
Entrada w = ABCD
Unidade de
controle
A
B
C
D
□
10
Exemplo de função de transição
δ(q0, A) = (q1,X,R)
q0
A
B
C
D
□
11
Exemplo de função de transição
δ(q0, A) = (q1,X,R)
q1
X
B
C
D
□
12
Configurações da Máquina de Turing
Configurações de uma MT são mudanças que
ocorrem no estado atual, no conteúdo atual e
na posição atual da cabeça.
Exemplo: ABqCD
q
A
B
C
D
□
13
Configurações da Máquina de Turing
Casos especiais:
◦
◦
◦
◦
◦
Começo da cadeia com movimento para a esquerda
Fim da cadeia com movimento para a direita
Configuração inicial (q0w)
Configuração de aceitação (qaceita)
Configuração de rejeição (qrejeita)
Uma MT aceita uma aceita a entrada w se uma
sequência de configurações C1, C2, ..., Ck existe.
14
Linguagens e Máquinas de Turing
Linguagem da MT: coleção de cadeias que são
aceitas
Linguagem Turing-reconhecível
Linguagem Turing-decidível
15
Exemplos de Máquinas de Turing
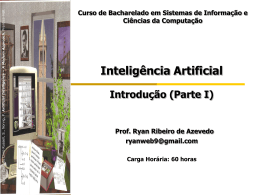
L = {anbn | n ≥1}
16
Exemplos de Máquinas de Turing
L = {anbn | n ≥1}
O estado q0 ao encontrar “a” escreve “x” (ou seja,
marca “a”), muda de estado (q1) e vai para a direita.
O estado q1 é responsável por encontrar um “b” e
marcá-lo com “y”.
A partir daí, outro estado (q2) entra em ação. Ele
volta na fita até encontrar “x” (o último “a”
marcado).
Quando q2 encontra o “x” devolve o controle para
o estado q0, que recomeça o processamento.
17
Exemplos de Máquinas de Turing
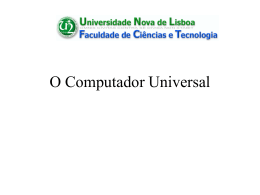
Quando q0 encontra o “y”, significa que já
terminou de marcar os símbolos “a”. Então, se
não houverem mais “b” para serem marcados, a
cadeia está correta.
Para isso é usado o estado q3, para percorrer o
restante da cadeia. Se encontrar só “y” e o □,
então a cadeia está correta.
Se encontrar algum “b”, a MT para (já que não
existe uma transição δ(q3, b) e a cadeia não é
aceita).
18
Exemplos de Máquinas de Turing
L = {anbn | n ≥1}
19
Exemplos de Máquinas de Turing
L = {anbn | n ≥1} – cadeia: w = aabb
20
Exemplos de Máquinas de Turing
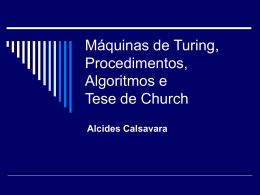
L = {w#w | w ϵ {0,1}*}
21
Variantes de Máquinas de Turing
Variantes
◦ Máquinas de Turing Multifita
◦ Máquinas de Turing Não-Determinísticas
◦ Enumeradores
Poder computacional
◦ Reconhecem a mesma classe de linguagens
Robustez
22
Variantes de Máquinas de Turing
E se permitíssemos que o cabeçote de uma MT
ficasse parado?
1. Função de transição de uma MT padrão
2.
Função de transição de uma MT estendida
Essa característica pode permitir que essas MT
reconheçam linguagens adicionais, incrementando
assim o poder desse modelo?
Equivalência entre modelos
23
Máquinas de Turing Multifita
Máquinas de Turing Multifita
A função de transição é modificada para permitir
ler, escrever e mover as cabeças em todas as fitas
simultaneamente
1. Função de transição de uma MT padrão
2. Função de transição de uma MT estendida
24
Máquinas de Turing Multifita
Poder computacional
25
Máquinas de Turing Multifita
Teorema: toda MT mulifita tem uma MT de uma
única fita que lhe é equivalente
Prova: Devemos mostrar como converter uma
MT multifita M em uma equivalente S, com
apenas uma fita
26
Máquinas de Turing Multifita
Cabeçotes e fitas virtuais
27
Máquinas de Turing Não-Determinísticas
Em qualquer ponto, a máquina pode proceder de
acordo com várias possibilidades
1.
Função de transição de uma MT padrão
2.
Função de transição de uma MT estendida
A computação é uma árvore
◦ Os
nós
correspondem
possibilidades
às
diferentes
Poder computacional
28
Máquinas de Turing Não-Determinísticas
Teorema:Toda MTND tem uma MTD que lhe é
equivalente
Idéia da prova: Podemos simular qualquer MTND
M, através de uma MT determinística S
Vemos a computação de M sobre uma entrada w
como uma árvore de possibilidades
Cada nó da árvore é uma
configuração de M
29
Máquinas de Turing Não-Determinísticas
A raiz é a configuração inicial
◦ Cada nó tem no máximo b filhos
Buscar um estado de aceitação
Não fazer busca em profundidade, fazer busca
em largura!
◦
30
Simulação da MTND
Prova:
◦ A MT simuladora S posui três fitas:
31
Máquinas de Turing Não-Determinísticas
Uma linguagem é Turing-reconhecível se, e
somente se alguma MTND a reconhece
Chamamos uma MTND de decisor se todos os
nós param sobre todas as entradas
Uma linguagem é decidível se e somente se
alguma MTND a decide
32
Enumeradores
Um enumerador pode ser visto como uma MT
com uma impressora anexa
A MT pode usar essa impressora como um
dispositivo de saída para imprimir cadeias
33
Equivalência com outros modelos
Existem vários modelos de computação de
propósito geral
Todos
os
modelos
compartilham
a
característica essencial de máquinas de Turing
◦ Acesso irrestrito a memória ilimitada
Linguagens de programação
◦ Descrevem exatamente a mesma classe de
algoritmos
34
Tese de Church-Turing
"A capacidade de computação representada
pela Máquina de Turing é o limite máximo que
pode ser atingido por qualquer dispositivo de
computação"
Supondo verdadeira a hipótese de Church
◦ Função computável: é possível construir uma
Máquina de Turing (ou formalismo equivalente) que
compute a função
◦ Função Não-Computável: não existe Máquina de
Turing (ou formalismo equivalente) que compute a
função
35
Terminologia para descrever MT’s
A entrada da MT é uma cadeia
E se quisermos fornecer como entrada um
objeto?
◦ Representar o objeto como uma cadeia
◦ Grafos, polinômios, gramáticas, autômatos...
Notação <O>
36
Universidade Federal da Paraíba
Programa de Pós-Graduação em Informática
Teoria da Computação – 2013.1
Máquinas de Turing
SIPSER – Capítulo 3: A tese de Church-Turing
Ana Paula Nunes Guimarães
Glauco de Sousa e Silva
Sarah Soares de Oliveira
Professor:Andrei Formiga
Baixar