SECÇÃO DE MECÂNICA ESTRUTURAL E ESTRUTURAS
DISCIPLINA DE RESISTÊNCIA DE MATERIAIS I
APONTAMENTOS DE
TRACÇÃO E COMPRESSÃO
DINAR CAMOTIM
LISBOA, MAIO DE 2009
Tracção e Compressão de Peças Lineares
TRACÇÃO E COMPRESSÃO DE PEÇAS LINEARES
1
O PROBLEMA DE SAINT-VENANT
•
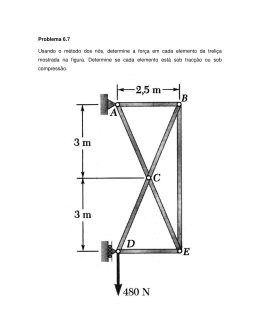
Considere-se uma barra prismática e homogénea submetida a um esforço normal
constante N. A barra tem comprimento L e secção transversal de área A − ver a Figura 1.1.
O material que a constitui é elástico linear, isotrópico e caracterizado pelos valores do
módulo de elasticidade E e do coeficiente de Poisson υ.
Figura 1.1 − Problema de Saint-Venant da tracção/compressão.
•
Conforme se viu anteriormente, a resolução deste problema, através do método semiinverso, conduz à solução:
σ 33 =
σ 11 = σ 22 = σ 12 = σ 13 = σ 23 = 0
ε12 = ε13 = ε 23 = 0
u1 = −
νN
EA
ε11 = ε 22 = −
x1 + k x2 + k1
∆ L = u 3 ( L ) − u 3 ( 0) =
νN
EA
u2 = −
νN
EA
NL
EA
∆ V = (ε11 + ε 22 + ε 33 ) V = ( 1 − 2ν )
N
A
ε 33 =
x2 − k x1 + k 2
N
EA
u3 =
N
x3 + k 3
EA
(alongamento/encurtamento da barra)
NL
E
(variação de volume − hip. peq. defs.)
1
Tracção e Compressão de Peças Lineares
•
Observações
(i) A grandeza E A designa-se por rigidez axial e representa “o esforço normal que é
necessário aplicar numa secção para provocar uma extensão longitudinal unitária”.
Mede a resistência da secção (barra) à deformação axial.
(ii) Em barras comprimidas as expressões apresentadas não são válidas para qualquer
valor do esforço normal. O seu limite de validade é controlado pela esbelteza da barra
(grandeza que depende da relação entre o comprimento e as dimensões e forma da
secção transversal) e está associada à ocorrência de fenómenos de instabilidade −
fenómenos geometricamente não-lineares que serão estudados posteriormente
(nomeadamente na disciplina de Resistência de Materiais II).
2
PEÇAS LINEARES SUJEITAS A ESFORÇO AXIAL
•
Na secção anterior recordaram-se expressões válidas para barras prismáticas,
homogéneas, constituídas por um material elástico linear e isótropo, e submetidas
apenas à acção de um esforço normal constante (i.e., sem variações de temperatura ou
tensões iniciais). Estas expressões podem continuar a ser utilizadas se alguma ou algumas
destas condições não forem verificadas, passando então a fornecer soluções aproximadas.
Abordam-se em seguida os casos de barras:
(i) Submetidas a um esforço normal variável − N=N (x3).
(ii) Com secção transversal variável − A=A (x3).
(iii)Heterogéneas − E=E (x1, x2, x3). Tratam-se separadamente as barras em que os
vários materiais estão dispostos em série (E=E (x3)) e em paralelo (E=E (x1, x2)).
(iv) Submetidas a variações de temperatura (uniformes na secção) − ∆T=∆T (x3).
(v) Com tensões iniciais − σ0 (x3)≠0.
•
Saliente-se que em todas as situações anteriores se admite que o material (ou os materiais)
que constitui a barra é elástico linear e isótropo − esta hipótese só será abandonada
na secção 4, onde se consideram materiais isótropos mas não elásticos lineares.
2
Tracção e Compressão de Peças Lineares
2.1
•
ESFORÇO NORMAL VARIÁVEL − N=N (X3)
Neste caso, as tensões, deformações e deslocamentos da barra são dadas por:
σ 33 ( x3 ) =
∆L =
N ( x3 )
A
1 L
N ( x3 ) dx3
EA ∫0
ε 33 ( x3 ) =
N (x3 )
EA
u3 =
ε 11 (x3 ) = ε 22 ( x3 ) = −
1
N ( x3 ) dx3 + k 3
EA ∫
ν N ( x3 )
EA
(E e A constantes)
Exemplo Ilustrativo
Considere-se a barra representada na Figura 2.1, com comprimento L e secção transversal de
área A, a qual está submetida à acção de uma carga P e do seu peso próprio γ − p(x3)= γ A.
Pretende-se determinar os campos de tensões, deformações e deslocamentos instalados na barra.
Figura 2.1 − Exemplo ilustrativo − esforço normal variável.
N ( x3 ) = − P − p x3
σ 33 ( x3 ) =
∆L =
u3 =
N (0 ) = − P
− P − p x3
P
= − − γ x3
A
A
N (L ) = − P − p L
ε 33 ( x3 ) =
− P − p x3
P γ
=−
− x3
EA
EA E
1 L
1
L2
PL γ L2
(
)
−
P
−
p
x
dx
=
−
PL
+
p
=
−
−
3
3
EA ∫0
EA
2
EA 2 E
1
EA
∫ (− P − p x3 ) dx3 + k 3 = −
1
x2
P
γ 2
P x3 + p 3 + k 3 = −
x3 −
x3 + k 3
EA
2
EA
2E
3
Tracção e Compressão de Peças Lineares
2.2
•
SECÇÃO TRANSVERSAL VARIÁVEL − A=A (X3)
Antes de mais, deve referir-se que se admite aqui uma variação da secção transversal da
barra A=A (x3) fraca (necessariamente contínua), por oposição a uma variação forte
(e.g., uma variação brusca ou a existência de furos ou entalhes). Este último caso será
abordado, de forma sucinta, no final desta secção.
•
Se a variação da secção transversal da barra for fraca, as tensões, deformações e
deslocamentos que nela ocorrem são razoavelmente aproximados pelas expressões:
σ 33 ( x3 ) =
∆L=
N
E
N
A (x3 )
L
ε 33 (x3 ) =
1
∫ A (x ) dx
0
3
3
u3 =
N
E
N
EA ( x3 )
ε 11 (x3 ) = ε 22 ( x3 ) = −
1
∫ A (x ) dx
3
+ k3
νN
EA ( x3 )
(N e E constantes)
3
Exemplo Ilustrativo
Considere-se a barra representada na Figura 2.2, com comprimento L e secção rectangular de
altura constante (h) e largura variável (b(x3) − variação linear entre b0 e bL), a qual está
submetida à accção de um esforço axial constante N. Pretende-se determinar os campos
de tensões, deformações e deslocamentos instalados na barra.
Figura 2.2 − Exemplo ilustrativo − secção transversal variável.
4
Tracção e Compressão de Peças Lineares
σ 33 ( x3 ) =
∆L =
=
u3 =
b −b
A ( x3 ) = b0 + L 0 x3 h
L
A (L ) ≡ AL = bL h
A (0 ) ≡ A0 = b0 h
NL
1
h b0 L + (bL − b0 ) x3
NL
1
Eh b0 L + (bL − b0 ) x3
ε 33 ( x3 ) =
NL L
1
NL 1
dx3 =
[ln (b0 L + (bL − b0 ) x3 )] 0L =
∫
Eh 0 b0 L + (bL − b0 ) x3
Eh bL − b0
b
NL
ln L
Eh (bL − b0 ) b0
NL
ln [(b0 L + (bL − b0 ) x3 )] + k 3
Eh (bL − b0 )
Exemplo Ilustrativo
Determinar o perfil de igual resistência de uma barra submetida à acção de uma carga P
e do seu peso próprio γ − p(x3)= γ A (ver a Figura 2.3).
Figura 2.3 − Exemplo ilustrativo − perfil de igual resistência.
Perfil de igual resistência:
A = A ( x3 )
N ( x3 )
= constante ≡ σ
A (x3 )
A (0 ) =
P
σ
≡ A0
x3
N ( x3 ) = P + ∫ p ( x3 ) dx3 = P + γ
0
x3
∫ A (x ) dx
0
3
3
5
Tracção e Compressão de Peças Lineares
N ( x3 )
=σ
A ( x3 )
A ( x3 )
Secção x3:
N ( x3 )
Secção x3 + dx3:
N ( x3 ) + dN
N (x3 ) + γ A( x3 ) dx3
=σ
A ( x3 ) + dA
⇔ γ A dx3 = σ dA ⇔
A (0 ) = A0
σ 33 =
•
⇒ C = ln A0
N (x3 )
=σ
A ( x3 )
ε 33 =
⇔
E
∆L=
N + γ A dx3 = σ ( A + dA) ⇔
dA γ
= dx3
A σ
A γ
⇒ ln = x3
A0 σ
σ
N (x3 ) + γ A(x3 ) dx3
=σ
A ( x3 ) + dA
A ( x3 ) + dA
σL
E
⇒ ln A =
γ
⇒
A( x3 ) = A0 e σ
u3 =
σ
E
γ
x +C
σ 3
x3
x3 + k 3
Observações
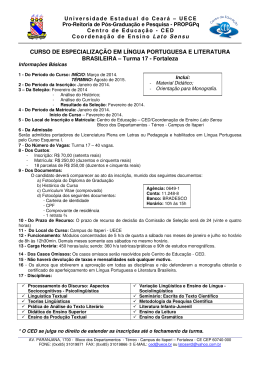
(i) Quando a variação da secção transversal da barra for forte (e.g., uma variação brusca
ou a existência de furos ou entalhes) as expressões anteriores constituem uma
má aproximação na vizinhança da zona barra onde ocorre essa variação. De facto, a
distribuição das tensões normais deixa de ser uniforme nessa zona − ver a Figura 2.4.
(a)
(b)
(c)
Figura 2.4 − Distribuição das tensões normais em barras com (a) uma variação brusca
da secção transversal, (b) um furo circular e (c) dois entalhes semi-circulares.
6
Tracção e Compressão de Peças Lineares
O valor fornecido pelas expressões apresentadas (σmed) subestima a tensão máxima
instalada na barra (σmax ), devendo ser “corrigido” por meio de um factor K cujo valor
depende da forma da secção e do tipo e características geométricas da sua variação
(σmax=K σmed) − existem na literatura expressões que fornecem valores de K.
(ii) Apesar da observação anterior, numa barra em que a variação da secção (A(x3)) seja
descontínua e caracterizada por troços prismáticos constantes adopta-se a solução
aproximada (N e E constantes e barra constituída por n troços prismáticos):
(σ 33 )1 =
m−1
u3 = ∑
i =1
N
Ai
(ε 33 )i =
N
EAi
(ε 11 )1 = (ε 22 )1 = − ν N
m −1
NLi
N
+
x3 − ∑ Li + k 3 com
EAi EAm
i =1
EA1
m −1
∑L
i
i =1
∆L =
N
E
n
Li
∑A
i =1
i
m
≤ x3 ≤ ∑ Li
i =1
Como o perfil de igual resistência de uma barra submetida ao seu peso próprio e a
uma carga P é difícil de fabricar (ver o último exemplo ilustrativo), considera-se
muitas vezes uma barra contituída por vários troços prismáticos − ver a Figura 2.5.
As características de um perfil “de igual resistência” desse tipo são determinadas
através das expressões anteriores (i.e., admitindo distribuições de tensões uniformes).
Figura 2.5 − Perfil “de igual resistência” constituído por vários troços prismáticos.
7
Tracção e Compressão de Peças Lineares
2.3
BARRAS HETEROGÉNEAS − E=E (x1, x2, x3)
2.3.1 MATERIAIS DISPOSTOS EM SÉRIE − E=E (X3)
•
Neste caso, as tensões, deformações e deslocamentos da barra são dadas por:
σ 33 ( x3 ) =
∆L=
•
N
A
N
A
L
ε 33 ( x3 ) =
N
E ( x3 ) A
1
∫ E (x ) dx
u3 =
3
0
3
ε 11 (x3 ) = ε 22 ( x3 ) = −
N
A
1
∫ E (x ) dx
3
+ k3
νN
E ( x3 ) A
(N e A constantes)
3
Nas situações mais realistas, em que a variação de E(x3) não é contínua mas sim por
troços constantes (correspondentes aos n materiais − comprimentos Li e módulos de
elasticidade Ei), tem-se:
(σ 33 )i = N (ε 33 )i ≡ ε i =
A
m−1
u3 = ∑
i =1
N
Ei A
(ε 11 )i = (ε 22 )i = − ν N
Ei A
m−1
NLi
N
+
x3 − ∑ Li + k 3 com
Ei A E m A
i =1
m −1
m
i =1
i =1
∆L=
N n Li
∑
A i =1 Ei
∑ Li ≤ x3 ≤ ∑ Li (N e A constantes)
Exemplo Ilustrativo
Considere-se a barra representada na Figura 2.6, a qual (i) está submetida ao carregamento
indicado e (ii) é constituída por quatro troços prismáticos e homogéneos − cada troço tem as
seguintes características:
Troço :
N1= −3 P
A1=A
E1=E
L1=L
Troço :
N2= −4 P
A2=A
E2=2 E
L2=1.5 L
Troço :
N3= −2 P
A3=1.5 A
E3=2 E
L3=1.5 L
Troço :
N4= −P
A4=A
E4=1.5 E
L4=2 L
Pretende-se determinar os campos de tensões, deformações e deslocamentos instalados na barra.
Figura 2.6 − Exemplo ilustrativo− barra heterogénea com materiais em série.
8
Tracção e Compressão de Peças Lineares
σ 1 = −3
P
A
σ 2 = −4
P
A
σ3 = −
4 P
3 A
σ4 = −
P
A
ε 1 = −3
P
EA
ε 2 = −2
P
EA
ε3 = −
2 P
3 EA
ε4 = −
2 P
3 EA
∆ L = −3
PL
PL PL 4 PL
25 PL
−3
−
−
=−
EA
EA EA 3 EA
3 EA
u3 = −3
P
x3 + k 3 (0 ≤ x3 ≤ L)
EA
u 3 = −6
PL
P
−2
(x3 − 2.5 L ) + k 3
EA
EA
(2.5 L ≤ x3 ≤ 4 L)
u 3 = −7
PL 2 P
(x3 − 4 L ) + k 3
−
EA 3 EA
(4 L ≤ x3 ≤ 6 L)
u 3 = −3
PL
P
(x3 − L ) + k 3 (L ≤ x3 ≤ 2.5 L)
−2
EA
EA
2.3.2 MATERIAIS DISPOSTOS EM PARALELO − E=E (X1, X2)
•
Admite-se que a barra funciona como um todo, o que implica que a aderência entre os
vários materiais impede quaisquer deslocamentos (deslizamentos) relativos entre eles.
•
A existência de uma distribuição uniforme de tensões normais conduziria agora a
extensões longitudinais variáveis nas secções transversais da barra (E=E (x1, x2)), o que
contraria a hipótese anterior (não ocorrerem deslocamentos relativos entre os vários
materiais). Assim, as condições de equilíbrio não são suficientes para determinar o
campo de tensões e o problema diz-se estaticamente indeterminado (ou hiperstático).
•
É necessário recorrer a condições que envolvem as deformações que ocorrem na barra
− equações de compatibilidade, as quais traduzem o facto de as extensões longitudinais
terem de ser uniformes nas secções da barra (única forma de estas sofrerem apenas
translacções de corpo rígido na direcção longitudinal). Elas têm a forma:
ε 33 ( x1 , x2 ) ≡ ε (x1 , x2 ) = constante ≡ ε
•
Tem-se, então:
9
Tracção e Compressão de Peças Lineares
∫
A
σ ( x1 , x2 )
E ( x1 , x2 )
∆L=
⇒ ε ∫A E ( x1 , x2 ) dA = N
=ε
∫
A
•
N
ε = E (x , x ) dA
∫A 1 2
⇒
σ ( x , x ) = E ( x1 , x2 ) N
1
2
∫A E (x1 , x2 ) dA
σ ( x1 , x2 ) dA = N
NL
E (x1 , x2 ) dA
u3 =
N
x3 + k 3
E ( x1 , x2 ) dA
∫
A
Nas situações mais realistas, em que a variação de E(x1, x2) não é contínua mas sim por
áreas constantes, correspondentes às zonas da secção ocupadas pelos n materiais − áreas
Ai e módulos de elasticidade Ei. Trata-se de um problema hiperstático de grau n−1,
definido pelas equações
n
∑E A
i
i
=N
equação de equilíbrio
i =1
ε j = ε 1 para j = 2,..., n
equações de compatibilidade (n−1)
e cuja solução é dada por (Ni é a parcela do esforço normal absorvida por cada material e
admite-se que todos os materiais têm o mesmo coeficiente de Poisson):
(σ 33 )i ≡ σ i =
Ei
n
∑E A
i
(ε 33 )i = ε =
N
i
Ei Ai
n
∑E A
i
i
i =1
•
N
(ε11 )i = (ε 22 )i = −ν ε
∑E A
i
i =1
Ni =
N
n
i
i =1
∆L =
NL
n
∑E A
i
u3 =
i
i =1
N
n
∑E A
i
x3 + k 3
i
i =1
Observações
(i) A rigidez axial da secção (barra) é agora dada por
n
∑E A .
i
i
i =1
(ii) As parcelas do esforço normal absorvidas por cada um dos materiais (Ni) são
proporcionais aos respectivos valores da rigidez axial (Ei Ai).
(iii) Admite-se que o único elemento de redução não nulo da distribuição de tensões
normais determinada, no centróide da seccção transversal, é o esforço normal N − esta
hipótese é trivialmente satisfeita se a secção exibir dupla simetria (geométrica e material).
10
Tracção e Compressão de Peças Lineares
No caso geral, o qual será abordado na disciplina de Resistência de Materiais II, os
elementos de redução não nulos da distribuição de tensões normais, no centróide da
seccção transversal, são o esforço normal e os dois momentos flectores.
Exemplo Ilustrativo
Considere-se a barra representada na Figura 2.7, a qual (i) está submetida a uma tracção
uniforme N e (ii) é constituída por dois materiais, a e b, dispostos em paralelo (a secção da barra
tem dupla simetria geométrica e material) e com as áreas e módulos de elasticidade indicados.
Pretende-se determinar os campos de tensões, deformações e deslocamentos instalados na barra.
Figura 2.7 − Exemplo ilustrativo− barra heterogénea com materiais em paralelo.
εa = εb ≡ ε =
N
N
=
Ea Aa + Eb Ab 20 EA
σa =
Ea
N
N=
20 EA
4A
N a = σ a Aa =
N
4
σa =
Eb
N
N=
20 EA
20 A
N b = σ b Ab =
3N
4
∆L=
NL
20 EA
u3 =
N
x3 + k 3
20 EA
2.4 BARRAS SUBMETIDAS A VARIAÇÕES DE TEMPERATURA − ∆T= ∆T (X3)
•
Neste caso, as tensões, deformações e deslocamentos da barra são dadas por:
σ 33 ( x3 ) = 0
L
ε 33 ( x3 ) = α ∆T ( x3 )
∆ L = α ∫ ∆T ( x3 ) dx3
0
ε11 ( x3 ) = ε 22 ( x3 ) = α ∆T ( x3 )
u3 = α ∫ ∆T ( x3 ) dx3 + k 3
(N=0; α e E(x1, x2) constantes)
11
Tracção e Compressão de Peças Lineares
•
A grandeza α designa-se por coeficiente de dilatação térmica linear e é uma característica
de cada material. Representa “a extensão linear provocada por uma variação de
temperatura unitária” e as unidades em que se exprime são (ºC)−1 − recorde-se que a
extensão linear é uma grandeza adimensional.
•
Observações
(i) Em barras heterogéneas, tem-se, no caso geral, α=α (x3) (materiais em série) ou
α=α (x1, x2) (materiais em paralelo) − neste último caso, continua a admitir-se que a
secção transversal da barra possui dupla simetria geométrica e material.
(ii) Barras estaticamente determinadas sujeitas apenas à acção de uma variação de
temperatura apresentam tensões nulas em todos os seus pontos. No caso de barras
estaticamente indeterminadas, uma variação de temperatura provoca, em geral,
um estado de coacção − tensões não nulas mas que equilibram forças aplicadas nulas
(i.e., “equivalentes a zero”). Estas afirmações permanecem válidas no caso de
estruturas, conforme se verá na secção 3.
Exemplo Ilustrativo
Considere-se a barra representada na Figura 2.8, a qual está submetida a (i) uma tracção
uniforme N e (ii) uma variação de temperatura variável longitudinalmente ∆T= ∆T (x3).
Pretende-se determinar os campos de tensões, deformações e deslocamentos instalados na barra.
Figura 2.8 − Exemplo ilustrativo− barra sujeita a tracção e variação de temperatura.
σ 33 ( x3 ) =
∆L=
N
A
ε 33 ( x3 ) =
N
+ α ∆T (x3 )
EA
NL
L
+ α ∫0 ∆T ( x3 ) dx3
EA
u3 =
ε11 (x3 ) = ε 22 (x3 ) = −ν
N
+ α ∆T ( x3 )
EA
N
x3 + α ∫ ∆T ( x3 ) dx3 + k 3
EA
12
Tracção e Compressão de Peças Lineares
Exemplo Ilustrativo
Considere-se a barra heterogénea (dois materiais dispostos em paralelo) representada na
Figura 2.9, a qual está submetida a uma variação de temperatura constante ∆T. Pretende-se
determinar os campos de tensões e deformações instalados na barra.
Figura 2.9 − Exemplo ilustrativo− barra heterogénea sujeita a variação de temperatura.
ε a = α a ∆T +
Na
=ε
Ea Aa
ε b = α b ∆T +
Nb
=ε
Eb Ab
Nb
Nb
= α ∆T +
ε a = ε b
2 α ∆T −
10 EA
15 EA ⇒
⇒
Na + Nb = 0
N = − N
b
a
7
2
ε = α ∆T = ε
N b = 6 α ∆T EA
σb = α ∆T E
b 5
⇒
⇒
5
N a = −6 α ∆T EA
σ a = −6 α ∆T E
ε = 7 α ∆T = ε
a 5
7
∆ L = α ∆T L
5
7
u3 = α ∆T x3 + k 3
5
∆T > 0 ⇒ σ b − tracção σ a − compressão ε > 0
∆T < 0 ⇒ σ b − compressão σ a − tracção ε < 0
O estado de tensão caracterizado por σa e σb é um estado de coacção:
σ a ≠ 0 e σ a ≠ 0, mas
∫ σ dA =σ
A
a
Aa +σ b Ab = 0 .
2.5 BARRAS COM TENSÕES INICIAIS (OU RESIDUAIS) − σ33 ≡σ0≠0 (MAS Ν=0)
•
Definem-se tensões inicias (ou residuais) de um corpo como as tensões que correspondem
ao estado natural do corpo, isto é, ao estado do corpo não solicitado por acções exteriores.
Assim, as tensões inicias são auto-equilibradas, na medida em que equilibram forças
13
Tracção e Compressão de Peças Lineares
exteriores nulas. É ainda habitual considerar o estado natural do corpo como o seu
estado indeformado (εij=0). Então, o estado natural pode ser caracterizado por (i) N=0,
σ33=0 e εij=0 (tensões inicias nulas) ou por (ii) N=0, σ33≠0 e εij=0 (tensões inicias não
nulas − estado de coacção).
•
Admitindo que o valor das tensões inicias não varia longitudinalmente, as tensões,
deformações e deslocamentos da barra são dadas por:
σ 33 ( x1 , x2 ) =
N
+ σ 0 (x1 , x2 )
A
ε 11 (x3 ) = ε 22 ( x3 ) = −ν ε
ε 33 ( x3 ) ≡ ε =
∆L =
NL
EA
u3 =
N σ 33 ( x1 , x2 ) − σ 0 ( x1 , x2 )
=
EA
E
N
x3 + k 3
EA
(N, E e A constantes)
Exemplo Ilustrativo − Pré-Esforço
• Pode definir-se pré-esforço como a operação que consiste em aplicar uma determinada
solicitação a uma estrutura (neste caso uma barra) com o objectivo de melhorar a sua
capacidade resistente a outras solicitações, a aplicar posteriormente. Aborda-se aqui o
caso de barras de betão armado (betão + aço) submetidas a um esforço normal de tracção.
• Sabe-se que (i) no aço as resistências à tracção e à compressão são sensivelmente iguais, e
que (ii) a resistência à compressão do betão é significativamente maior que a sua resistência
à tracção (muito pequena). Deste modo, a resistência de uma barra de betão armado à tracção
é condicionada pela muito pequena resistência do betão a tensões de tracção.
• Este facto sugeriu a realização de uma operação de pré-esforço, a qual visa aumentar a
resistência da barra (e do betão) a um esforço normal de tracção e compreende os passos que
se descrevem em seguida:
(i)
Considera-se um varão de aço submetido a um esforço de tracção Fp, designado
por “força de pré-esforço”.
N ai = Fp
σ ai =
Fp
Aa
ε ai =
Fp
Ea Aa
∆ Lia =
Fp L
Ea Aa
14
Tracção e Compressão de Peças Lineares
(ii)
Envolve-se o varão de aço com betão, mas mantêm-se os dois materiais independentes.
N aii = Fp
σ aii =
Fp
ε aii =
Aa
Fp
Ea Aa
σ bii = 0
N bii = 0
∆ Liia =
ε bii = 0
Fp L
Ea Aa
≈ 0 (peq. defs.)
∆ Liib = 0
(iii) Provoca-se a aderência entre os dois materiais, de modo a impedir totalmente
qualquer deslizamento relativo, e retira-se o esforço Fp, o que equivale a aplicar
um esforço (− Fp) ao conjunto aço + betão − note-se que quando se retira Fp os dois
materiais já estão a trabalhar solidariamente.
Ea Aa
N aiii = Fp 1 −
Ea Aa + Eb Ab
N biii = −
ε aiii = ε biii = ε = −
Eb Ab
Fp
Ea Aa + Eb Ab
Fp
Ea Aa + Eb Ab
σ aiii =
Fp
Aa
σ biii = −
−
Ea
Fp
Ea Aa + Eb Ab
Eb
Fp
Ea Aa + Eb Ab
∆ Liiia = ∆ Liiib = ∆ L = −
Fp L
Ea Aa + Eb Ab
Obteve-se assim uma barra de betão pré-esforçado (pré-esforço Fp), onde está
instalado um estado de coacção caracterizado por tensões de compressão no betão e
tensões de tracção no aço. De algum modo, “transferiu-se” alguma resistência à
tracção do aço para o betão. O estado natural da barra de betão pré-esforçado é:
σ a0 =
Fp
Aa
σ b0 = −
−
Ea
Fp
Ea Aa + Eb Ab
Eb
Fp
Ea Aa + Eb Ab
Fp L
≈ L
L 1 −
Ea Aa + Eb Ab
ε a0 = 0
ε b0 = 0
(pequenas deformações)
15
Tracção e Compressão de Peças Lineares
(iv) Aplica-se à barra de betão pré-esforçado um esforço normal N (de tracção − caso
contrário, a operação de pré-esforço teria sido prejudicial).
(troca os Ωs por As)
N aiv = Fp + (N − Fp )
N biv = (N − Fp )
ε aiv = ε biv = ε =
N > Fp
N < Fp
Fp
Ea Aa
Ea Aa + Eb Ab
σ aiv =
Eb Ab
Ea Aa + Eb Ab
σ biv = (N − Fp )
N
Ea Aa + Eb Ab
Aa
− (N − Fp )
Ea
Ea Aa + Eb Ab
Eb
Ea Aa + Eb Ab
∆ Liva = ∆ Livb = ∆ L = −
NL
Ea Aa + Eb Ab
⇒ Tracção no betão e no aço
⇒ Compressão no betão e tracção no aço
2.6 ENERGIA DE DEFORMAÇÃO
•
Na Teoria da Elasticidade mostrou-se que a energia de deformação (U ) armazenada num
corpo elástico é dada por
U = ∫ W dV + U 0
V
onde U0 é a energia intrínseca (energia armazenada pelo corpo no seu estado natural) e W
é a densidade da energia de deformação (por unidade de volume) associada às acções
exteriores a que o corpo está submetido.
•
No caso de o corpo ser constituído por um material elástico linear e isótropo W toma
a forma:
W=
1
H ijkl (ε kl − α ∆T δ kl ) (ε ij − α ∆T δ ij ) + σ ij0 (ε ij − α ∆T δ ij )
2
onde os coeficientes Hijkl podem ser expressos em termos de duas constantes e se tem:
H ijkl (ε kl − α ∆T δ kl ) = σ ij − σ ij0
16
Tracção e Compressão de Peças Lineares
•
Logo, a energia de deformação (U) armazenada no corpo é dada por:
U =∫
V
•
1
σ ij − σ ijo (ε ij − α ∆T δ ij ) dV
2
(
)
Consideram-se em seguida as expressões da energia de deformação relativas a uma
série de casos particulares:
(I) Peças Lineares (barras)
U=
1 L
2 ∫0
∫ (σ
A
ij
)
− σ ij0 (ε ij − α ∆T δ ij ) dA dx3 + U 0
(II) Peças Lineares onde apenas existem esforço axial e tensões normais σ33
U=
1 L
2 ∫0
∫ (σ
A
33
0
− σ 33
) (ε 33 − α ∆T ) dA dx3 + U 0
(III) Caso (II) + Ausência de variações de temperatura e tensões iniciais
U=
1 L
2 ∫0
∫
A
σ 33 ε 33 dA dx3
(IV) Caso (III) + Secções transversais homogéneas (materiais dispostos em série)
U=
1 L
2 ∫0
∫
A
N N
1 L
dA dx3 = ∫
A EA
2 0
∫
A
N2
1 L N2
dA
dx
dx3
=
3
EA2
2 ∫0 EA
Exemplo Ilustrativo
Calcular a energia de deformação das barras analisadas nos Exemplos Ilustrativos das secções
2.1 e 2.3.1.
(i)
Exemplo Ilustrativo da secção 2.1 (página 3)
U=
3
1 L
1 L 2
1 2
2
2 2
2 L
(
)
N
x
dx
=
P
+
p
x
+
2
P
p
x
dx
=
P
L
+
p
+ P p L2
3
3
3
3
3
∫
∫
0
0
2 EA
2 EA
2 EA
3
p=0 ⇒ U =
(
)
P2 L
2 EA
17
Tracção e Compressão de Peças Lineares
(ii)
Exemplo Ilustrativo da secção 2.3.1 (página 8)
2
2
(− 4 P )2 3 L (− 2 P )2 3 L (− P )2 2 L 73 P 2 L
1 4 Nj
1 (− 3P ) L
2 +
2 +
U= ∑
Lj =
+
=
3
2 j =1 E j A j
2 EA
2 EA
3 EA
EA 6 EA
2
ESTRUTURAS CONSTITUÍDAS POR PEÇAS LINEARES SUJEITAS APENAS A ESFORÇO AXIAL
3
•
Considere-se agora um tipo especial de problemas que envolvem corpos constituídos
unicamente por peças lineares (eventualmente associadas a um ou mais corpos rígidos)
− estes corpos designam-se habitualmente por estruturas reticuladas.
•
As ligações das peças lineares (entre si, com o exterior ou com eventuais corpos
rígidos) e o carregamento a que as estruturas estão submetidas são de forma a que
essas peças lineares estejam sujeitas apenas a esforço axial.
•
Para resolver um problema deste tipo basta determinar, para todas as barras da estrutura:
(i) Os esforços axiais (N). O procedimento utilizado para efectuar esta determinação
depende da estatia global da estrutura, a qual combina as respectivas estatia exterior
e estatia interior. Enquanto a estatia exterior está relacionada com o modo como a
estrutura está ligada ao exterior (i.e., com o número e natureza dos seus apoios),
a estatia interior diz respeito a forma como estão ligados entre si os vários elementos
(barras e/ou corpos rígidos) que a constituem.
(ii) Os alongamentos/encurtamentos (∆L).
(iii)Os deslocamentos das extremidades (δ).
3.1
•
ESTATIA GLOBAL
A estatia global de uma estrutura está relacionada com o modo como os seus vários
elementos estão ligados entre sim e ao exterior. Assim, diz-se que uma estrutura,
submetida à acção de um carregamento geral (arbitrário) é:
18
Tracção e Compressão de Peças Lineares
(i) Hipoestática se não for possível garantir o equilíbrio estático da estrutura e de todas
as suas partes. O grau de hipoestatia da estrutura é fornecido pelo número de
movimentos de corpo rígido que podem ter a estrutura ou as suas partes.
(ii) Isostática se existir apenas uma combinação de reacções de apoio e esforços axiais
nas barras que garanta o equilíbrio estático da estrutura e de todas as suas partes.
(iii)Hiperstática se existirem várias combinações de reacções de apoio e esforços axiais
nas barras que garantam o equilíbrio estático da estrutura e de todas as suas partes.
O grau de hiperstatia da estrutura é fornecido pelo número de ligações
(interiores e/ou exteriores) que podem ser suprimidas continuando a garantir o
equilíbrio estático.
•
A Figura 3.1 mostra alguns exemplos de estruturas (i) hipoestática de grau 1 ((g)), (ii)
isostáticas ((a) e (d)), e (iii) hiperstática de grau 3 ((b)) e (iv) hiperstáticas de grau 1
(todas as restantes).
Figura 3.1 − Exemplos de estruturas hipoestáticas, isostáticas e hiperstáticas.
19
Tracção e Compressão de Peças Lineares
3.2
•
ESTRUTURAS ISOSTÁTICAS
Estruturas isostáticas são, por definição, aquelas em que é possível determinar os
valores de todas as reacções de apoio e dos esforços normais (neste contexto) em todas as
barras recorrendo exclusivamente a equações de equilíbrio. Uma vez conhecidos todos
os esforços axiais é possível calcular as tensões normais e o alongamento/encurtamento
em cada barra (utilizando as equações estabelecidas na secção 2). Finalmente, as
equações de compatibilidade permitem determinar os valores dos deslocamentos que
definem completamente a configuração deformada da estrutura.
Exemplo Ilustrativo
Considere-se a estrutura isostática representada na Figura 3.2, a qual está submetida ao
carregamento indicado (carga P e variação de temperatura ∆T) e é constituída por uma barra
rígida e duas barras deformáveis (uma homogénea e a outra heterogénea − dois materiais
dispostos em paralelo). Pretende-se determinar (i) o esforço normal, as tensões normais e o
alongamento/encurtamento de cada barra deformável e (ii) o valor do deslocamento vertical
do ponto de aplicação da carga P.
Figura 3.2 − Exemplo ilustrativo − estrutura isostática.
RA + RC = P
Equações de equilíbrio:
PL
RA × L = 3
2P
RC = 3 = N CD
⇒
R = P = N
AB
A 3
20
Tracção e Compressão de Peças Lineares
P
σ AB = 24 A
Relações esforços-tensões:
σ a = 4 P − 10 α ∆T E
CD 9 A 3
b
=
σ CD
2P 2
+ α ∆T E
45 A 3
PH
∆LAB = 24 EA + α ∆T H
Relações esforços-alongamentos:
∆L = 2 P H + 5 α ∆T H
CD
45 EA 3
Relações deslocamentos-alongamentos: δ B = ∆LAB
Equação de compatibilidade:
3.3
•
δE −δB
2L/3
=
δD −δB
L
δ D = ∆LCD
⇒
δ E = ∆LAB +
2
(∆LCD − ∆LAB )
3
ESTRUTURAS HIPERSTÁTICAS
Estruturas hiperstáticas são, por definição, aquelas em que não é possível determinar os
valores de todas as reacções de apoio e/ou dos esforços normais (neste caso) em todas as
barras recorrendo exclusivamente a equações de equilíbrio. É necessário utilizar também
as equações de compatibilidade e as relações esforços-alongamentos. O sistema constituído
por estes três tipos de equações é determinado, permitindo calcular inicialmente:
(i) Ou os esforços normais nas barras e, eventualmente, as reacções de apoio − para isso,
escrevem-se as equações de compatibilidade em termos dos esforços, utilizando as
equações esforços-alongamentos.
(ii) Ou os alongamentos/encurtamentos nas barras e, eventualmente, as reacções de
apoio − para isso, escrevem-se as equações de equilíbrio em termos dos alongamentos,
utilizando as equações esforços-alongamentos.
21
Tracção e Compressão de Peças Lineares
•
No primeiro caso, (i) segue-se a determinação das tensões normais e dos alongamentos
nas várias barras, após o que (ii) se calculam os deslocamentos que definem a
configuração deformada da estrutura.
•
No segundo caso, determinam-se (i) por um lado os esforços e as tensões normais
nas várias barras e (ii) por outro lado os deslocamentos necessários à definição da
configuração deformada da estrutura.
•
Observação
Uma variação de temperatura introduz numa estrutura hiperstática uma distribuição de
esforços normais (não nulos) auto-equilibrada, i.e., que equilibra forças exteriores nulas
(no caso de uma estrutura isostática esses esforços são todos nulos).
Exemplo Ilustrativo
Considere-se a barra hiperstática representada na Figura 3.3, a qual tem comprimento L
(L=L1+L2) e está submetida ao carregamento indicado (carga P). Pretende-se determinar (i) os
diagramas de esforços normais e das tensões normais, e (ii) o deslocamento horizontal do ponto
de aplicação da carga P.
Figura 3.3 − Exemplo ilustrativo− barra hiperstática.
Equações de equilíbrio:
RA + RC = P
Relações esforços-tensões: σ AB =
N AB
A
Relações esforços-alongamentos: ∆LAB =
N AB = − RA
σ BC =
N AB L1
EA
N BC = RC
N BC
A
∆LBC =
N BC L2
EA
Relações deslocamentos-alongamentos: δ B = ∆LAB = −∆LBC
Equação de compatibilidade: ∆LAB + ∆LBC = 0
22
Tracção e Compressão de Peças Lineares
(i) Primeiro método de resolução: determinação inicial dos esforços normais
∆LAB + ∆LBC = 0 ⇔
N AB L1 + N BC L2 = 0
L2
L
N BC 1 + = P
N BC = 1 P
−
N
+
N
=
P
L1
AB
BC
L
⇒
⇒
N AB L1 + N BC L2 = 0
N = − N L2
N = − L2 P
BC
AB
AB
L
L1
σ AB = −
δB = −
L2 P
L A
σ BC =
L1 P
L A
∆LAB = −
L1 L2 P
= −∆LBC
L EA
L1 L2 P
(←)
L EA
(ii) Segundo método de resolução: determinação inicial dos alongamentos/encurtamentos
− N AB + N BC = P ⇔
− ∆LAB
P L1 L2
− ∆LAB L2 + ∆LBC L1 =
EA
∆LAB + ∆LBC = 0
N AB = −
δB = −
L2
P
L
σ AB = −
L2 P
L A
EA
EA
+ ∆LBC
=P ⇔
L1
L2
−
P
∆LAB ∆LBC
=
+
L1
L2
EA
L1 L2 P
∆LAB = −
⇒
L EA
∆LBC = −∆LAB
N BC =
L1
P
L
σ BC =
L1 P
L A
L1 L2 P
(←)
L EA
Exemplo Ilustrativo
Considere-se a estrutura hiperstática representada na Figura 3.4, a qual (i) é constituída por
uma barra rígida e duas barras deformáveis e (ii) está submetida ao carregamento indicado
(carga P). Pretende-se determinar (i) os esforços normais e as tensões normais nas barras
BD e CE, e (ii) os deslocamentos verticais dos pontos D, E e F (ponto de aplicação da carga P).
23
Tracção e Compressão de Peças Lineares
Figura 3.4 − Exemplo ilustrativo − estrutura hiperstática.
RA + RB + RC = P
Equações de equilíbrio:
3L
RB × L + RC × 2 L = P × 2
Relações esforços-tensões: σ BC =
N BC
A
σ CE =
Relações esforços-alongamentos: ∆LBD =
N BD = RB
N CE
A
N BD H
EA
δF =
N CE H
EA
∆LCE =
Relações deslocamentos-alongamentos: δ D = ∆LBD
Equações de compatibilidade: δ E = 2 δ D
N CE = RC
δ E = ∆LCE
δD + δE
2
=
∆LBD + ∆LCE
2
(i) Primeiro método de resolução: determinação inicial dos esforços normais
∆LCE = 2 ∆LBD
⇔
N CE = 2 N BD
3
N BD = P
N CE = 2 N BD
10
⇒
3
N BD + 2 N CE = 2 P
N = 3 P
CE
5
σ BD =
δD =
3 P
10 A
3 PH
10 EA
∆LBD =
3 PH
10 EA
δE =
3 PH
5 EA
σ CE =
δF =
3P
5A
∆LCE =
3 PH
5 EA
9 PH
20 EA
24
Tracção e Compressão de Peças Lineares
(ii) Segundo método de resolução: determinação inicial dos alongamentos/encurtamentos
N BD + 2 N CE =
3
3 PH
P ⇒ ∆LBD + 2 ∆LCE =
2
2 EA
3 PH
∆LBD = 10 EA
⇒
∆L = 3 P H
CE 10 EA
∆LCE = 2 ∆LBD
3 PH
∆LBD + 2 ∆LCE = 2 EA
N BD =
δD =
•
3P
10
3 PH
10 EA
σ BD =
3 P
10 A
δE =
N CE =
3 PH
5 EA
3P
5
δF =
σ CE =
3P
5A
9 PH
20 EA
As duas formas de abordar o problema que acabam de ser descritas e ilustradas estão
na base de dois métodos especiais que permitem resolver, de forma sistemática,
estruturas hiperstáticas: (i) o Método das Forças (ou dos Esforços) e (ii) o Método dos
Deslocamentos. Ambos os métodos utilizam o Princípio da Sobreposição, o que significa
que podem ser aplicados na resolução de estruturas lineares, isto é, estruturas para as
quais sejam válidas as hipóteses da linearidade geométrica e da linearidade física.
•
O método das forças consiste em fornecer um processo sistemático para estabelecer
sistemas determinados (i.e., com solução única) de equações de compatibilidade, cujas
incógnitas são esforços ou reacções de apoio. Uma vez calculados os valores dessas
incógnitas é possível, recorrendo apenas a equações de equilíbrio, determinar todos os
restantes esforços e reacções de apoio.
•
O método dos deslocamentos fornece um processo sistemático para estabelecer sistemas
determinados de equações de equilíbrio, cujas incógnitas são deslocamentos. Após
calcular os valores dessas incógnitas é possível, utilizando só equações de compatibilidade
e relações alongamentos-deslocamentos, determinar os alongamentos/encurtamentos em
todas as barras da estrutura.
•
Descreve-se em seguida apenas o método das forças e ilustra-se a sua aplicação através de
um exemplo. Antes, porém, é conveniente recordar o enunciado do Princípio da
Sobreposição, o qual, como se disse atrás, é válido apenas para estruturas lineares:
25
Tracção e Compressão de Peças Lineares
“Considere-se uma estrutura submetida à actuação independente de várias solicitações
(e.g., forças aplicadas ou variações de temperatura). Pode então dizer-se que qualquer
efeito (e.g., uma reacção de apoio, um esforço ou um deslocamento) provocado por
uma combinação linear dessas solicitações é igual à mesma combinação linear dos
efeitos homólogos causados por cada uma das solicitações primitivas”
•
Observações
(i) Neste capítulo aplica-se o método das forças apenas a estruturas reticuladas cujas
barras deformáveis estão submetidas unicamente a esforço normal. Nas disciplinas de
Resistência de Materiais II e Análise de Estruturas I estudar-se-á a sua aplicação a
problemas mais gerais.
(ii) O método dos deslocamentos só voltará a ser abordado mais tarde, no âmbito da
disciplina de Análise de Estruturas I.
3.3.1 MÉTODO DAS FORÇAS (OU DOS ESFORÇOS)
•
PASSOs DO MÉTODO
(i) Determinar o grau de hiperstatia da estrutura (n).
(ii) Definir um sistema base, o qual se obtém da estrutura original através da supressão
de n ligações (interiores e/ou exteriores) − é, portanto, sempre uma estrutura
isostática. Passam assim a ser permitidos n deslocamentos (relativos ou
absolutos, consoante as correspondentes ligações suprimidas forem interiores ou
exteriores). Os esforços (ligações interiores) e/ou reacções de apoio (ligações
exteriores) associados às n ligações suprimidas designam-se por redundantes ou
incógnitas hiperstáticas (X1,..., Xn).
Observações
(1) Uma estrutura hiperstática pode dar origem a vários sistemas base. O único factor
a condicionar a escolha de um determinado sistema base é a conveniência
(facilidade) de cálculo.
(2) A escolha das n ligações a suprimir deve ser feita de forma criteriosa, de modo a
garantir que a estrutura resultante não seja hipoestática (i.e., tenha as ligações
“mal distribuídas”).
26
Tracção e Compressão de Peças Lineares
(iii)Submeter o sistema base (estrutura isostática) aos seguintes (n + 1) carregamentos:
(iii.1) 1 carregamento constituído por todas as solicitações aplicadas à estrutura
original (hiperstática).
(iii.2) n carregamentos constituídos por uma única força (ou esforço) aplicada, a qual
tem valor unitário e corresponde a uma incógnita hiperstática (Xi=1, i=1, , n).
Observação
Os sentidos convencionados para as forças e/ou esforços unitários (e, portanto,
também para as incógnitas hiperstáticas) são arbitrários.
(iv) Calcular, no sistema base e para cada um dos (n + 1) carregamentos definidos no
ponto anterior, os n deslocamentos correspondentes às ligações suprimidas.
Representam-se esses deslocamentos por U i0 (deslocamento correspondente à
ligação suprimida i e provocado pelas solicitações actuantes na estrutura original) e
por f ij (deslocamento correspondente à ligação suprimida i e provocado pela força
ou esforço unitário associada à incógnita hiperstática Xj) − estes últimos
deslocamentos designam-se por coeficientes de flexibilidade (ou flexibilidades).
Observação
Toma-se para sentido positivo do deslocamento correspondente à ligação suprimida i
o sentido arbitrado para a incógnita hiperstática Xi − deste modo, todos os coeficientes
de flexibilidade f ij são sempre positivos.
(v) Aplicar o princípio da sobreposição para calcular o valor das incógnitas hiperstáticas.
Observe-se que:
(v.1) A estrutura original com o seu carregamento pode ser obtida através da
sobreposição de (n + 1) carregamentos no sistema base, n dos quais estão
expressos em termos dos valores das incógnitas hiperstáticas Xi, ainda
desconhecidas e cujo cálculo constitui o objectivo do método das forças.
(v.2) São sempre conhecidos, na estrutura original, os valores dos deslocamentos
correspondentes às ligações suprimidas − representam-se por Ui e, na grande
maioria dos casos, tem-se Ui=0.
27
Tracção e Compressão de Peças Lineares
Podem então escrever-se as seguintes equações de compatibilidade, utilizando o
princípio da sobreposição,
U 10 + X 1 f11 + X 2 f12 + ... + X n f1n = U1
0
U 2 + X 1 f 21 + X 2 f 22 + ... + X n f 2 n = U 2
M
M
U n0 + X 1 f n1 + X 2 f n 2 + ... + X n f nn = U n
as quais constituem um sistema de equações lineares que permite determinar os valores
das redundantes Xi. O sistema de equações pode ser escrita de forma matricial como
{U }+ [F ] {X } = {U }
onde a matriz [F ] = [ f ] se designa por matriz de flexibilidade. Pode provar-se
0
ij
que fij=fji, i.e., que a matriz de flexibilidade é simétrica.
Observações
(1) No caso de redundantes que correspondam a reacções de apoios elásticos tem-se
Ui= − Xi /K, onde K é a rigidez do apoio elástico.
(2) No caso de estruturas hiperstáticas de grau 1, o sistema de equações lineares
degenera numa única equação.
(3) Um valor de Xi positivo significa que o sentido arbitrado para essa redundante
estava correcto. Um valor de Xi negativo significa que é necessário inverter o
sentido inicialmente arbitrado para essa redundante.
(vi) Uma vez conhecidos os valores das incógnitas hiperstáticas pode calcular-se qualquer
efeito (e.g., um esforço, uma reacção de apoio, uma tensão ou um deslocamento) na
estrutura original de duas formas:
(vi.1) Raciocinando directamente em termos da estrutura original, a qual foi tornada
estaticamente determinada pelo conhecimento das n redundantes.
(vi.2) Utilizando o princípio da sobreposição e somando os valores desse efeito
produzidos no sistema base pelas n redundantes Xi e pelas solicitações
actuantes na estrutura original.
28
Tracção e Compressão de Peças Lineares
Exemplo Ilustrativo
Considere-se a estrutura hiperstática representada na Figura 3.5, a qual (i) é constituída por
uma barra rígida e três barras deformáveis e (ii) está submetida ao carregamento indicado
(carga P). Pretende-se determinar os valores (i) das reacção nos apoios A, B, C e D e (ii)
dos deslocamentos verticais dos pontos E, F, G e H (ponto de aplicação da carga).
Figura 3.5 − Exemplo ilustrativo − aplicação do método das forças.
Adopta-se o sistema base representado na Figura 3.6, o qual se obtém da estrutura original
suprimindo os apoios em B e C. Nessa mesma figura está esquematizada a aplicação do método
das forças (para esse sistema base) − consideram-se os três carregamentos indicados,
identificados respectivamente por (carregamento aplicado à estrutura original), (força
unitária correspondente ao apoio suprimido em C) e (força unitária correspondente ao
apoio suprimido em B). A resolução do problema envolve os seguintes passos:
Figura 3.6 − Exemplo ilustrativo − esquematização da aplicação do método das forças.
29
Tracção e Compressão de Peças Lineares
(i) Resolução do sistema base submetido ao carregamento 3
RD =
4
()
P ↑
3 PH
δ G = 4 EA (↓ )
δG 3 P H
(↓)
=
δ F =
2 8 EA
δG 3 P H
δ E = 4 = 16 EA (↓ )
⇒
3 PH
0
U1 = −δ F = − 8 EA
U 0 = −δ = − 3 P H
E
1
16 EA
(ii) Resolução do sistema base submetido ao carregamento RD =
1
2
(↓)
1 H
δ G = 2 EA ↑
δG 1 H
=
↑
δ F =
2 4 EA
δG 1 H
δ E = 4 = 8 EA ↑
()
()
1× H 5 H
f11 = δ F + EA = 4 EA
f 21 = δ E = 1 H
8 EA
⇒
()
(inclui alongamento de CF )
(iii) Resolução do sistema base submetido ao carregamento RD =
1
(↓ )
4
1 H
δ G = 4 EA ↑
δG 1 H
=
↑
δ F =
2 8 EA
δG 1 H
δ E = 4 = 16 EA ↑
()
()
1 H
f = δF =
= f 21
12
8 EA
f = δ + 1 × H = 17 H
E
22
EA 16 EA
⇒
()
(inclui alongamento de BE )
(iv) Determinação das incógnitas hiperstáticas
U 10 + X 1 f11 + X 2 f12 = U 1
0
U 2 + X 2 f 21 + X 2 f 22 = U 2
⇔
U10 f11 f12 X 1 U 1
0 +
=
U 2 f 21 f 22 X 2 U 2
30
Tracção e Compressão de Peças Lineares
1
3
5
4 X 1 + 8 X 2 = 8 P
1 X + 17 X = 3 P
8 1 16 2 16
2
2
X 1 = 7 P ⇒ RC = 7 P ↑
X = 1 P ⇒ R = 1 P ↑
B
2 7
7
()
⇔
()
(v) Resultados finais
RD =
3
1
1 4
P + X1 − + X 2 − = P ↑
4
2
4 7
()
3 PH
1 H
1 H 4 PH
δG = 4 EA + X 1 − 2 EA + X 2 − 4 EA = 7 EA
δG 2 P H
(↓)
=
δ F =
2
7 EA
δG 1 P H
δ E = 4 = 7 EA (↓ )
δH =
3.4
•
δ F + δG
2
=
(↓)
3 PH
(↓)
7 EA
CÁLCULO DE DESLOCAMENTOS
Até aqui utilizaram-se as seguintes abordagens para calcular os deslocamentos dos nós
de uma estrutura reticulada:
(i) Calculam-se inicialmente os esforços normais e os alongamentos/encurtamentos das
várias barras da estrutura. Em seguida, utilizam-se as equações de compatibilidade
(deslocamentos-alongamentos) para determinar os deslocamentos dos nós. Utilizouse esta abordagem em estruturas isostáticas (sempre) e estruturas hiperstáticas com as
equações de compatibilidade escritas em termos dos esforços e reacções de apoio.
Observação
Recorde-se que a aplicação do método das forças envolve unicamente o cálculo
de deslocamentos num sistema base, sempre uma estrutura isostática.
31
Tracção e Compressão de Peças Lineares
(ii) Calculam-se inicialmente os alongamentos/encurtamentos das várias barras da
estrutura. Em seguida, utilizam-se as equações de compatibilidade (deslocamentosalongamentos) para determinar os deslocamentos dos nós. Utilizou-se esta
abordagem em estruturas hiperstáticas com as equações de equilíbrio escritas em
termos dos alongamentos/encurtamentos.
•
Apresentam-se nesta secção dois métodos especiais para calcular deslocamentos em
estruturas reticuladas, os quais se baseiam nos conceitos de trabalho e energia. A
utilização de qualquer destes dois métodos é particularmente vantajosa no caso de
estruturas com um elevado número de barras, na medida em que nenhum deles requer o
estabelecimento de relações deslocamentos-alongamentos (muito complexas) ou qualquer
outro tipo de considerações de natureza geométrica.
•
O primeiro método baseia-se no Princípio da Conservação da Energia Mecânica e apenas
pode ser utilizado num número restrito de problemas.
•
O segundo método é uma aplicação do Princípio dos Trabalhos Virtuais e pode ser
utilizado em qualquer tipo de problema.
3.4.1 CONSERVAÇÃO DA ENERGIA MECÂNICA
•
O Princípio da Conservação da Energia Mecânica afirma que:
“Numa estrutura elástica actuada por um conjunto de forças aplicadas quasiestaticamente (i.e., sem alterarem o valor da energia cinética) e em que não ocorram
trocas de calor com o exterior (transformação adiabática) ou geração interna de calor,
tem-se que o trabalho realizado pelas forças exteriores (τ e ) é igual à variação da
energia de deformação ( ∆U )”. Tem-se, então, τ e = ∆U .
Observações
(1) Se se admitir que U=0 quando as forças exteriores que realizam τ e são nulas,
vem ∆U ≡ U e, portanto, τ e = U − esta hipótese será admitida daqui em diante.
(2) Apesar de o princípio ser válido para qualquer estrutura elástica, considera-se
aqui apenas a sua aplicação a estruturas elásticas lineares (linearidade física).
32
Tracção e Compressão de Peças Lineares
•
ENERGIA DE DEFORMAÇÃO
A energia de deformação de uma estrutura reticulada é dada pela soma das energias de
deformação das barras que a constituem, i.e.,
N
U = ∑ U i (Ui é a energia de deformação da barra i e n o número de barras deformáveis)
i =1
Recorde-se (ver secção 2.6) que a energia de deformação de uma barra constituída por
um material elástico linear, submetida apenas a esforço normal e sem variações de
temperatura ou tensões iniciais é dada, no caso geral, por
U=
1 L
2 ∫0
∫
A
σ 33 ε 33 dA dx3 =
1 L
2 ∫0
∫
σ 332
E
A
dA dx3
podendo ainda utilizar-se outras expressões (escritas directamente em termos do
esforço normal N) numa série de casos particulares − ver secção 2.6.
•
TRABALHO DAS FORÇAS EXTERIORES
Admite-se que a estrutura é actuada por um conjunto de forças exteriores conservativas (o
trabalho realizado depende apenas das posições inicial e final do ponto de aplicação, e não
da trajectória por ele percorrida) representadas por Qj (j=1,..., m). Podem ser forças
(i) concentradas (aplicadas num ponto de um corpo rígido, num nó ou no interior de
uma barra − neste último caso, actuando obrigatoriamente segundo o respectivo eixo) ou
(ii) distribuídas (aplicadas ao longo de uma barra e actuando segundo o respectivo eixo) −
no seu conjunto, designam-se por Forças Generalizadas.
A cada força generalizada Qj corresponde um deslocamento generalizado qj, o qual
representa o deslocamento (ou soma dos deslocamentos) da estrutura no(s) ponto(s) de
aplicação, na direcção e no sentido de Qj. Pode então definir-se o Trabalho Exterior
realizado pelas forças exteriores para levar a estrutura da sua configuração inicial (qj=0)
até à sua configuração final ( q j = q jf ) como
q1f
qmf
0
0
m
q jf
τ e = ∫ Q1 dq1 + ... + ∫ Qm dqm = ∑ ∫ Q j dq j
j =1
0
Em virtude de se considerarem apenas estruturas com comportamento linear (linearidade
geométrica + linearidade física) pode ainda escrever-se
33
Tracção e Compressão de Peças Lineares
m
q jf
τ e = ∑ ∫ Q j dq j =
j =1
0
1 m f f
∑Qj q j
2 j =1
Por exemplo, no caso de uma estrutura ser solicitada por uma única força exterior, o valor
de τ e corresponde à área tracejada representada na figura
•
CÁLCULO DE DESLOCAMENTOS
O princípio da conservação da energia mecânica apenas permite calcular deslocamentos
em estruturas reticuladas nas seguintes condições:
(i) A estrutura é solicitada por uma única força generalizada Q.
(ii) Calcula-se unicamente o valor do deslocamento generalizado q, correspondente
à força generalizada Q.
Nestas condições, tem-se
n
n
1
Q q = ∑U i
2
i =1
2 ∑U i
⇒ q=
i =1
Q
Exemplo Ilustrativo
Considere-se a barra representada na Figura 3.7, constituída por dois troços distintos e submetida
ao carregamento indicado (carga P). Pretende-se determinar o valor do deslocamento
horizontal do ponto C (deslocamento do ponto de aplicação da carga no sentido desta).
Figura 3.7 − Exemplo ilustrativo − aplicação do método das forças.
34
Tracção e Compressão de Peças Lineares
1
2
τ e = P δC
U = U AB + U BC
N AB = P
2P
2P
a
a
N BC = 3 ⇒ σ BC = 3 A
N b = P ⇒ σ b = P
BC
BC 3
15 A
U AB =
2
1 N AB
LAB 1 P 2 L
P2 L
=
=
2 E AB AAB 2 8 E A 16 E A
2
a
b
σ BC
(
σ BC
)
(
σ BC
) dA dx =
1 L
1 L
1 L
= ∫ ∫
dA dx3 = ∫ ∫
dA dx3 + ∫ ∫
3
a
b
0
A
0
A
0
A
BC
BC
BC
2
E BC
2
EBC
2
EBC
2
U BC
a
) LBC + 1 (N BCb ) LBC = 4 P 2 L + P 2 L = P 2 L
1 (N BC
a
a
b
b
2 E BC
ABC
2 EBC
ABC
180 E A 90 E A 30 E A
2
a
b
= U BC
+ U BC
=
U=
2
2
P2 L
P2 L
23 P 2 L
+
=
16 E A 30 E A 240 E A
⇒
δC =
2U
23 P L
=
P
240 E A
3.4.2 TRABALHOS VIRTUAIS
•
Viu-se anteriormente que o Princípio dos Trabalhos Virtuais (PTV) afirma que:
“Se um corpo deformável actuado por um sistema de forças exteriores (distribuídas no
volume e/ou na superfície do corpo) em equilíbrio for submetido a um campo de
deslocamentos virtuais compatível com as ligações (interiores e exteriores),
então o trabalho virtual realizado pelas forças exteriores e interiores é nulo”.
Tem-se, então, τ e + τ i = 0 .
•
Pretende-se agora particularizar o PTV ao caso de estruturas reticuladas (i) solicitadas
de modo a que as barras que as constituem estejam submetidas unicamente a esforço
axial e (ii) com padrões de deformação provocáveis por esforços normais e/ou variações
de temperatura. Tem-se, nesse caso,
m
τ e = ∑ Q′j q′j′
j =1
n
n
k =1
k =1
′′ )k
τ i = ∑ (τ i )k = −∑ ∫ (ε 33
Lk
0
∫ (σ ′ )
Ak
33 k
dA dx3
35
Tracção e Compressão de Peças Lineares
onde m é o número de forças generalizadas do sistema equilibrado, n é o número de
barras e (τ i )k é o trabalho virtual das forças instaladas no interior da barra k. As forças
generalizadas a considerar são forças concentradas ou distribuídas (com as características
mencionadas na secção anterior) e ainda esforços normais em barras da estrutura −
o deslocamento generalizado que corresponde a este último tipo de força generalizada é
′ ≡ σ , o PTV pode então
′′ ≡ ε e σ 33
o deslocamento axial relativo (δr). Fazendo ε 33
ser expresso na forma
m
n
j =1
k =1
Lk
∑ Q′j q′j′ = ∑ ∫ ε k′′ ∫ σ k′ dA dx3
•
0
Ak
Consideram-se em seguida expressões do trabalho virtual realizado pelas forças instaladas
no interior duma barra numa série de casos particulares:
(I) Material (ou materiais) elástico linear (Lei de Hooke)
ε ′′ =
∫
A
N ′′
+ α ∆T ′′
E dA
N ′′
L
τ i = − ∫
+ α ∆T ′′ ∫ σ ′ dA dx3
⇒
0
∫A
E dA
A
(II) Caso (I) + Tensões uniformes nas secções transversais no sistema equilibrado
σ′ =
N′
A
⇒
N ′′
+ α ∆T ′′ dx3
E dA
∫A
τ i = − ∫ N ′
0
L
(III) Caso (II) + Secções transversais homogéneas (materiais não dispostos em paralelo)
∫ E dA = E A
A
⇒
L
N ′ N ′′
+ N ′α ∆T ′′ dx3
EA
τ i = − ∫
0
(IV) Caso (III) + ε’’ não provocadas por variações de temperatura
∆T ′′ = 0
⇒
τ i = −∫
L
0
N ′ N ′′
dx3
EA
36
Tracção e Compressão de Peças Lineares
•
CÁLCULO DE DESLOCAMENTOS − MÉTODO DAS CARGAS UNITÁRIAS
O método das cargas unitárias é um método para calcular deslocamentos, provocados em
estruturas por solicitações exteriores, que se baseia no Princípio dos Trabalhos Virtuais.
Como se viu anteriormente, a aplicação do PTV a uma determinada estrutura requer a
existência de (i) um sistema de forças exteriores equilibrado (sistema “linha”) (ii) um
campo de deslocamentos (e correspondentes deformações) compatível (sistema “duas
linhas”). No método das cargas unitárias, tem-se:
(i) O sistema equilibrado é “fictício” (i.e., é “imaginado” exclusivamente com o intuito
de aplicar o método) e é caracterizado pela existência de uma única força generalizada
exterior, de valor unitário e aplicada no ponto e com a direcção do deslocamento que
se pretende calcular. O sentido da carga unitária é arbitrário, mas passa a constituir o
sentido positivo do deslocamento em causa (i.e., um valor positivo do deslocamento
indica que este tem o sentido da força unitária − um valor negativo indica que tem o
sentido oposto ao da força).
(ii) O campo de deslocamentos e deformações compatível é constituído pelos
deslocamentos e deformações efectivamente introduzidos na estrutura pelas
solicitações exteriores que provocam o deslocamento que se pretende calcular.
(iii)Em consequência do que foi dito nos dois pontos anteriores, os trabalhos virtuais
das forças exteriores e interiores do sistema equilibrado, quando este é submetido
ao campo de deslocamentos e deformações compatível, são dados por
n
Lk
τ i = −∑ ∫ ε k′′ ∫ σ k′ dA dx3
τ e = 1′ × q′′
k =1
0
Ak
onde q′′ é o deslocamento que se pretende calcular e σ k′ é um campo de tensões que
equilibre a força unitária. Tem-se, então, que
n
Lk
q′′ ≡ q = ∑ ∫ ε k′′ ∫ σ k′ dA dx3
k =1
0
Ak
expressão que sintetiza o método das cargas unitárias
Observações
(1) Tudo se passa como se a estrutura, em equilíbrio sob a acção de uma carga
unitária, fosse submetida a um campo de deslocamentos (e deformações) virtuais
37
Tracção e Compressão de Peças Lineares
que coincide como o campo de deslocamentos reais provocados nessa estrutura
pelo conjunto de solicitações exteriores responsáveis pelo deslocamento que se
pretende calcular − a compatibilidade com as ligações está obviamente garantida.
(2) Observe-se que esta equação não está dimensionalmente correcta, na medida em
que está “subentendida” a presença da carga unitária e das respectivas unidades.
•
PASSOS DO MÉTODO DAS CARGAS UNITÁRIAS
(i) Calcular as deformações ε ′′ provocadas na estrutura pelo conjunto de solicitações
exteriores responsáveis pelo deslocamento que se pretende calcular.
Observação
A determinação de ε ′′ obriga a resolver a estrutura, i.e., a calcular os esforços,
tensões e deformações que efectivamente ocorrem na estrutura. No caso da
estrutura ser hiperstática e a sua resolução se efectuar através do método das forças,
é necessário calcular deslocamentos no sistema base adoptado. O cálculo desses
deslocamentos pode ser feito também através do método das cargas unitária − nesse
caso, o cálculo dos coeficientes de flexibilidade fkk (índices iguais) tem a
particularidade da coincidência entre os sistemas equilibrado e compatível (ambos
associados ao sistema base actuado pela mesma força unitária). Este facto origina
por vezes a confusão entre o método das forças e o método das cargas unitárias.
Relembre-se que enquanto o primeiro é um método destinado a resolver estruturas
hiperstáticas, o segundo permite calcular deslocamentos em estruturas (isostáticas
ou hiperstáticas).
(ii) Determinar um conjunto de esforços normais N ′ que esteja em equilíbrio com
uma carga unitária aplicada no ponto e com a direcção do deslocamento que se
pretende calcular. Em seguida, determinar, para cada barra, um campo de
tensões σ ′ em equilíbrio com o respectivo esforço normal N ′ − sem perda de
generalidade, pode considerar-se sempre σ ′ = N ′ / A .
Observações
(1) Se a estrutura for isostática existe apenas um conjunto de esforços normais
N ′ que equilibra a carga unitária. Se a estrutura for hiperstática existem
vários conjuntos de esforços normais N ′ nessas condições. Neste último caso, a
38
Tracção e Compressão de Peças Lineares
escolha do conjunto a utilizar é feita exclusivamente por conveniência de cálculo
− normalmente, escolhe-se o conjunto com maior número de esforços nulos.
(2) É frequente designarem-se os esforços normais do sistema equilibrado por N ,
em vez de N ′ − nestes apontamentos, adopta-se sempre a designação N ′ .
(iii)Calcular o valor do deslocamento q através da expressão
n
L
q = ∑ ∫ N k′ ε k′′ dx3
k =1
0
Exemplo Ilustrativo (idêntico ao exemplo ilustrativo da secção 3.2)
Considere-se a estrutura isostática representada na Figura 3.8, a qual está submetida ao
carregamento indicado (carga P e variação de temperatura ∆T) e é constituída por uma barra
rígida e duas barras deformáveis (uma homogénea e a outra heterogénea − dois materiais
dispostos em paralelo). Pretende-se determinar o valor do deslocamento vertical do ponto de
aplicação da carga P.
Figura 3.8 − Exemplo ilustrativo − aplicação do método das cargas unitárias.
′ =
(i) ε ′AB
P
+ α ∆T
24 EA
(ii) Estrutura isostática
′′ =
ε CD
2P
5
+ α ∆T
45 EA 3
′ )
⇒ só existe um conjunto de esforços normais ( N ′AB , N CD
que equilibra uma força unitária vertical aplicada em E.
1 P
2 2P
5
′ LAB + N CD
′ ε CD
′′ LCD =
+ α ∆T H
(iii) δ E = N ′AB ε ′AB
+ α ∆T H +
3 24 EA
3 45 EA 3
δE =
47 P H 13
+ α ∆T H (↓ )
1080 EA 9
39
Tracção e Compressão de Peças Lineares
Exemplo Ilustrativo (idêntico ao exemplo ilustrativo da secção 3.3.1)
Considere-se a estrutura hiperstática representada na Figura 3.9, a qual (i) é constituída por uma
barra rígida e três barras deformáveis e (ii) está submetida ao carregamento indicado (carga P).
Pretende-se determinar o valor do deslocamento vertical do ponto de aplicação da carga P.
Figura 3.9 − Exemplo ilustrativo − aplicação do método das cargas unitárias.
′′ =
(i) N BE
1
P
7
′′ =
N CF
2
P
7
′′ =
N DG
4
P
7
′ , N CF
′ , N DG
′ )
(ii) Estrutura hiperstática ⇒ existem vários conjuntos de esforços normais ( N BE
que equilibram uma força unitária vertical aplicada em H.
Exemplos de possíveis conjuntos de esforços normais equilibrados:
′ =
N BE
1
7
2
4
′ =
(esforços reais − também compatíveis)
N DG
7
7
1
1
′ =
=
N DG
(equilíbrio apenas com os apoios C e D)
2
2
′ = 0 (equilíbrio apenas com os apoios A e B)
= 0 N DG
3
′ = 0 (equilíbrio apenas com os apoios A e C)
=
N DG
2
3
′ =
= 0 N DG
(equilíbrio apenas com os apoios A e D)
4
′ =
N CF
′ = 0 N CF
′
N BE
′ = 3 N CF
′
N BE
′ = 0 N CF
′
N BE
′ = 0 N CF
′
N BE
′ N BE
′′ + N CF
′ N CF
′′ + N DG
′ N DG
′′ )
(iii) δ E = ( N BE
H 3 PH
=
(↓)
EA 7 EA
Observação
De entre os cinco possíveis conjuntos de esforços normais equilibrados indicados,
aqueles que conduzem a um menor esforço de cálculo são, obviamente, os três
últimos (apenas uma das barra tem esforço axial não nulo).
40
Tracção e Compressão de Peças Lineares
Exemplo Ilustrativo
Considere-se a estrutura articulada isostática representada na Figura 3.10, a qual está submetida
ao carregamento indicado (carga horizontal P aplicada no nó C). Pretende-se determinar o valor
do deslocamento vertical do nó C.
Figura 3.10 − Exemplo ilustrativo − aplicação do método das cargas unitárias.
(i)
A resolução da estrutura conduz aos seguintes valores dos esforços normais:
′ =0
N ′AC
′ =
N ′AD
(ii) Estrutura isostática
5
P
2
′′ = − 2 P
N BC
′′ =
N BD
5
P
2
′′ = P
N CD
⇒ existem um conjunto de esforços normais que equilibra
uma força unitária vertical aplicada em C.
A resolução da estrutura (actuada por uma carga vertical unitária aplicada em C)
conduz aos seguintes esforços normais (equilibrados e compatíveis):
N ′AC = − 2
5
(iii) δ VC = ∑
k =1
δ VC =
N ′AD =
5
2
′ =− 2
N BC
′ =
N BD
5
2
′ =1
N CD
N k′ N k′′
L
5 5
5 5
1
0 +
Lk =
P
+
2
P
+
P
+
P
Ek AK
EA
32
32
2
5 5 + 8 + 16 2 P L
PL
= 2.613
↓
16
EA
EA
()
Exemplo Ilustrativo
Considere-se a estrutura articulada hiperstática (de grau 2) representada na Figura 3.11, a qual
está submetida ao carregamento indicado (duas cargas verticais de valores P e 2P, com P=36 kN).
Sabendo que esse mesmo carregamento provoca na estrutura os esforços normais (deixa-se
como exercício a sua determinação)
41
Tracção e Compressão de Peças Lineares
N AB = 25.61 kN
N BC = 19.54 kN
N EF = −9.30 kN
N CD = 3.23 kN
N DF = −4.03 kN
N AE = −32.02 kN
N BE = −4.55 kN
N BF = 7.59 kN
N CF = −74.13 kN
N CE = −20.39 kN
pretende-se calcular o deslocamento horizontal do nó D e o deslocamento vertical do nó E.
Figura 3.11 − Exemplo ilustrativo − aplicação do método das cargas unitárias.
AAB = ABC = ACD = AEF = A
L AB = LBC = LCD = LEF = L
P = 36 kN
ABE = ACF =
LBE = LCF =
L = 240 cm
6
A
5
3
L
4
ABF = ACE =
3
A
4
AAE = ADF =
3
A
2
2
5
3
LAE = LBF = LCE = LDF = L + L2 = L
4
4
A = 200 cm 2
E = 20000 kN / cm 2
(A) Cálculo de δ HD
(i)
N ′′ ≡ N
(ii)
Estrutura hiperstática
⇒ escolhe-se um conjunto de esforços normais que
equilibre uma força unitária horizontal aplicada em D e seja tão “simples” quanto
possível (esforços não nulos apenas nas barras horizontais AB, BC e CD):
′ = N CD
′ = 1.0 kN
N ′AB = N BC
′ = N DF
′ = N BE
′ = N CF
′ = N BF
′ = N CE
′ =0
N ′AE = N EF
42
Tracção e Compressão de Peças Lineares
(iii) 1 kN × δ HD =
δ HD =
N′ N
N′ N
N ′AB N AB
L AB + BC BC LBC + CD CD LCD
EAAB
EABC
EACD
L
(25.61× 1.0 + 19.54 × 1.0 + 3.23 × 1.0) = 48.88 kN L = 0.02908 cm (→)
EA
EA
(B) Cálculo de δ VE
(i)
N ′′ ≡ N
(ii)
Estrutura hiperstática
⇒ escolhe-se um conjunto de esforços normais que
equilibre uma força unitária vertical aplicada em D e seja tão “simples” quanto
possível (esforços não nulos apenas no “triângulo” formado pelas barras AE,
CE, AB e BC):
′ =
N ′AB = N BC
2
kN
3
′ =−
N ′AE = N CE
5
kN
6
′ = N DF
′ = N BE
′ = N CF
′ = N BF
′ = N CD
′ =0
N EF
(iii) 1 kN × δ VE =
N′ N
N′ N
N ′AB N AB
N′ N
L AB + BC BC LBC + AE AE L AE + CE CE LCE
EAAB
EABC
EAAE
EACE
L 2
2
5 L 5
5 L 5
δ VE =
× 25.61 + × 19.54 +
− (− 32.02) +
− (− 20.39) kN
3
3 EA 6
6 EA 6
EA 3
δ VE = 80.56 kN
L
= 0.04839 cm (↓ )
EA
43
Tracção e Compressão de Peças Lineares
4
BARRAS CONSTITUÍDAS POR MATERIAIS NÃO-LINEARES
•
Até aqui admitiu-se sempre que as barras das estruturas reticuladas estudadas eram
constituídas por materiais que obedeciam à Lei de Hooke, i.e., materiais elásticos lineares.
Nesta secção estudar-se-á o comportamento de barras (sujeitas apenas a esforço axial)
constituídas por um determinado tipo de material não-linear − um material elásticoperfeitamente plástico. Na secção seguinte (secção 5), analisar-se-á o comportamento
de estruturas reticuladas formadas por barras constituídas por este tipo de material.
•
Outros exemplos de materiais não-lineares são o material elástico não-linear, o material
rígido-plástico ou o material elasto-plástico com endurecimento − na disciplina de RM I
não se estudam barras constituídas por estes tipos de materiais.
•
Um material elástico-perfeitamente plástico (ou, simplesmente, elasto-plástico − por
simplicidade, assim será designado de aqui em diante) exibe uma relação constitutiva
uni-axial (entre a tensão normal longitudinal σ e a extensão longitudinal ε) com as
características ilustradas na Figura 4.1 e definidas pelas condições:
Figura 4.1 − Relação constitutiva de um material elástico-perfeitamente plástico (elasto-plástico).
σCced ≤ σ ≤ σTced
C
T
σced < σ < σced ⇒
σ = σC ∧ dσ > 0
ced
+
T
σ = σced ∧ dσ < 0
σ = σCced ∨ σ = σTced
(
1
ε11 = ε 22 = −υ ε e − ε p
2
1
dσ
E
1
⇒ dε e = dσ
E
1
⇒ dε e = dσ
E
∧ dσ = 0 ⇒ dε p (valor indeterminado )
dε e =
)
ε = εe + ε p =
σ
+ ∫ dε p
E
44
Tracção e Compressão de Peças Lineares
C
T
onde (i) σ ced
e σ ced
são as tensões de cedência do material à compressão e à tracção, e
(ii) ε e e ε p são as parcelas elástica e plástica da deformação (extensão) axial. Note-se
T
C
que é frequente um material ter σ ced
. Nesse caso, designa-se por “tensão de
= −σ ced
T
C
cedência” e representa-se por σ ced o valor σ ced
= σ ced
.
•
O material elasto-plástico apresenta um comportamento elástico linear se se tiver (i)
C
T
C
T
σ ced
< σ < σ ced
, (ii) σ = σ ced
e dσ > 0 ou (iii) σ = σ ced
e dσ < 0 .
•
C
T
Quando num ponto se tem σ = σ ced
ou σ = σ ced
, diz-se que, nesse ponto, “ocorreu a
cedência do material” ou que “o material plastificou”.
•
A deformação (extensão longitudinal) num ponto é composta por duas parcelas:
(i) Uma parcela elástica, designada por ε e , de valor ε e = σ / E e reversível (i.e.,
σ = 0 ⇒ ε e = 0 ).
(ii) Uma parcela plástica, designada por ε p , de valor indeterminado e irreversível
(i.e., σ = 0 ⇒ ε = ε p ≠ 0 , no caso geral).
•
A deformação plástica ocorre sem variação de volume ( ∆V = 0 ). Deste modo, tem-se
ε 11p = ε 22p = − ε p / 2 , o que significa que o respectivo coeficiente de Poisson vale 1/2.
4.1
•
BARRAS ELASTO-PLÁSTICAS
Antes de iniciar o estudo de barras constituídas por um ou mais materiais elasto-plásticos
e submetidas apenas a esforço axial, é conveniente referir que se admite que o diagrama
dos esforços axiais que actuam na barra é constante e introduzir as seguintes definições:
(i) Esforço normal de cedência (Nced). Valor do esforço normal que corresponde a
atingir-se pela primeira vez a cedência na barra (observe-se que a primeira cedência
ocorre simultaneamente em vários pontos da barra, frequentemente mesmo em todos
os seus pontos − teoricamente, no entanto, é suficiente que ocorra num único ponto).
C
T
≠ σ ced
em algum dos materiais que
Saliente-se que, no caso de se ter σ ced
constituem a barra, é necessário distinguir entre os valores do esforço normal de
T
C
cedência à compressão ( N ced
) e à tracção ( N ced
).
45
Tracção e Compressão de Peças Lineares
(ii) Esforço normal de plastificação (Npl). Valor do esforço normal que corresponde
a atingir-se pela primeira vez a plastificação total de uma secção transversal da
barra (observe-se que a primeira plastificação pode ocorrer simultaneamente em
várias secções da barra, frequentemente mesmo em todos as suas secções). Note-se
C
T
que, no caso de se ter σ ced
≠ σ ced
em algum dos materiais que constituem a
barra, é necessário distinguir entre os valores do esforço normal de plastificação à
compressão ( N Cpl ) e à tracção ( N Tpl ).
Observação
Numa barra em que todas as secções transversais sejam homogéneas (i.e., em
que não existem materiais diferentes dispostos em paralelo), tem-se Nced=Npl.
•
Deste modo, admitindo uma variação monótona de N a partir de N=0, tem-se que:
C
T
< N < N ced
, todos os pontos da barra exibem um comportamento elástico −
(i) Se N ced
diz-se, então, que a barra está a trabalhar em regime elástico.
(ii) Se N ced < N < N pl (tracção ou compressão), alguns pontos da barra exibem um
comportamento elástico, enquanto os restantes estão já plastificados (nenhuma secção
totalmente plastificada, no entanto) − diz-se, então, que a barra está a trabalhar em
regime elasto-plástico.
C
T
(iii)Se N = N ced
ou N = N ced
, diz-se que a barra está na fronteira entre os regimes
elástico e elasto-plástico.
(iv) Se N = N Cpl ou N = N Tpl , diz-se que a barra atingiu o colapso, i.e., é possível a
sua deformação sem ser necessário um acréscimo de esforço normal. O valor do
esforço normal Npl também se designa por “esforço normal de colapso” ou “esforço
normal último”, na medida em que é o máximo valor que a barra pode suportar.
•
BARRAS HETEROGÉNEAS − MATERIAIS DISPOSTOS EM SÉRIE
No caso de uma barra constituída por n materiais dispostos em série (i=1, , n), tem-se:
(
i
N ced = N pl = min σ ced
Ai
i
)
n
(∆L )ced = (∆L ) pl = min
(σ cedi Ai ) ∑
i
i =1
Li
Ei Ai
46
Tracção e Compressão de Peças Lineares
A = c te
•
⇒
( )
i
N ced = N pl = min σ ced
A ∧
i
n
Li
i
(∆L )ced = (∆L ) pl = min
(
)
σ ced
∑
i
i =1
Ei
BARRAS HETEROGÉNEAS − MATERIAIS DISPOSTOS EM PARALELO (Dupla Simetria)
No caso de uma barra constituída por n materiais dispostos em paralelo (i=1, , n), tem-se:
σ i
n
N ced = ∑ Ei Ai min ced
i =1
i Ei
(∆L )ced
i
σ ced
= L min
i
Ei
n
i
N pl = ∑ σ ced
Ai
i =1
(∆L ) pl = L max σ ced
i
i
Ei
Se se retirar o esforço normal quando N = N pl e ∆L = (∆L ) pl obtém-se uma barra com
uma variação de comprimento permanente ( (∆L ) p − parcela plástica de ∆L ) e uma
n
distribuição de tensões residuais ( σ ri ) auto-equilibrada, i.e., tais que ∑ σir Ai = 0 ,
i =1
dadas por
47
Tracção e Compressão de Peças Lineares
N =0
∆L = 0
→ N = N pl
→
→ ∆L = (∆L ) pl
N =0
→ ∆L = (∆L ) p = (∆L ) pl − (∆L )e = (∆L ) pl −
N pl L
b
∑E A
i
i =1
i
→ σ i = σ ced
σi =0
i
→ σ i = σ ri = σ ced
−
Ei
b
∑E A
i
N pl
i
i =1
Exemplo Ilustrativo
Calcular os valores dos esforços normais de cedência e plastificação das barras a representadas
na Figura 4.2.
(a)
(b)
Figura 4.2 − Exemplo ilustrativo − esforços normais de cedência e plastificação.
(a)
N ced = (6 EA + 4 EA + 2 EA)
1 σced
= 6 σced A
2 E
N pl = (3 σced A + 3 σced A + 2 σced A) = 8 σced A
(∆L )ced
=
1 σ ced L
2 E
(∆L )pl = σ ced L
E
Se se retirar o esforço normal imediatamente após a plastificação, tem-se:
(∆L ) p = σ ced L − 8σ ced A L = 1 σ ced L
E
σ r1 = 3σ ced −
12 EA
3
E
6E
8 σ ced A = −σ ced
12 EA
48
i
Tracção e Compressão de Peças Lineares
3
2
σ r2 = σ ced −
σ r3 = σ ced −
3
∑σ
i
r
i =1
(b)
2E
1
8 σ ced A = σ ced
12 EA
6
E
1
8 σ ced A = σ ced
12 EA
3
1
1
Ai = − 1 × 1 + × 2 + × 2 σ ced A = 0
6
3
Tracção
(N )
= 6 σ ced A ∧
(N )
(N )
= 6 σ ced A ∧
(N )
T
ced AB
T
pl AB
= 4 σ ced A
T
ced BC
T
pl BC
= 5σ ced A
T
N ced
= 4 σ ced A
⇒
N Tpl = 5 σ ced A
⇒
(∆L )Tced = L 4 σced A + 3 σced =
7 σced L
6 E 12 E
2 6 EA
(∆L )Tpl = L 5σ ced A + σ ced = 11 σ ced L
2 6 EA
E 12
E
Compressão
(N )
= −3σ ced A ∧
(N )
(N )
= −3σ ced A ∧
(N )
C
ced AB
C
pl AB
(∆L )Cced = L − σ ced
2 2E
−
C
ced BC
C
pl BC
= −4 σ ced A
= −5 σ ced A
⇒
⇒
C
N ced
= −3σ ced A
N Cpl = −3σ ced A
3σ ced A
7 σ ced L
C
= −
= (∆L ) pl
6 EA + 2 EA
16 E
49
Tracção e Compressão de Peças Lineares
Se se retirar o esforço normal imediatamente após a plastificação, tem-se:
Tracção
(∆L ) p = 11 σ ced L − 5σ ced A L − 5σ ced A L =
12
σ r1 = 3σ ced −
E
16 EA
30
3
σ ced = − σ ced
8
4
12 EA
9 σ ced L
48 E
σ r2 = σ ced −
5
3
σ ced = σ ced
8
8
σ r3 = 0
Compressão
(∆L ) p = σ r1 = σ r2 = σ r3 = 0
Observação
Os resultados apresentados nesta secção podem ser facilmente estendidos ao
caso de os diagramas de esforços normais que actuam nas barras não serem
uniformes, mas dependerem linearmente de um parâmetro ϕ, i.e., serem da forma
N (x3)=N0 (x3) + ϕ N1 (x3), onde N0 (x3) é o diagrama que actua inicialmente na barra
e N1(x3) fornece a “forma” da respectiva variação. Nesse caso, os conceitos de esforço
normal de cedência (Nced) e esforço normal de plastificação (Npl) seriam substituídos
pelos valores do parâmetro ϕ que correspondem à ocorrência da primeira cedência
(ϕced) e à plastificação da primeira secção transversal (ϕpl). Nesta secção estudaram-se
os casos em que N0(x3)=0 e N1(x3)= ±1, o que significa que se tem N (x3)= ± ϕ.
50
Tracção e Compressão de Peças Lineares
5
ANÁLISE DE ESTRUTURAS RETICULADAS FORMADAS POR BARRAS ELASTO-PLÁSTICAS
•
Antes de se abordar a resolução de estruturas reticuladas formadas por barras com
comportamento elasto-plástico, é conveniente definir o tipo de solicitações que vão ser
consideradas (recorde-se que só podem introduzir esforços normais):
(i) Solicitações de valor constante. Qualquer combinação de (a) forças concentradas
aplicadas nos nós, (b) forças concentradas ou distribuídas aplicadas axialmente
ao longo de uma barra e (c) variações de temperatura uniformes em cada barra,
desde que a estrutura suporte essa combinação de acções com um comportamento
elástico, i.e., com todas as barras a trabalharem em regime elástico. No limite, pode
estar iminente a ocorrência da primeira cedência.
(ii) Solicitações de valor variável. Qualquer combinação de forças concentradas aplicadas
nos nós e cujos valores dependem linearmente de um parâmetro λ, designado
por “parâmetro de carga” − representam-se essas forças por Qi = λ Qi , onde os
valores de Qi indicam o perfil de carregamento e se convenciona que λ ≥ 0 .
•
Convém ainda introduzir as seguintes definições:
(i) Carregamento de cedência ( (Qi )ced = λced Qi ). Carregamento que está associado ao
valor do parâmetro carga λced, o qual corresponde ao atingir-se pela primeira
vez o esforço normal de cedência Nced numa barra da estrutura.
(ii) Carregamento de colapso ou carregamento limite ou carregamento último
( (Qi )u = λu Qi ). Carregamento que está associado ao valor do parâmetro carga
λu, o qual corresponde ao atingir-se pela primeira vez o esforço normal de
plastificação Npl num número de barras suficiente para que ocorra o colapso da
estrutura (a estrutura transforma-se num mecanismo, i.e., pode sofrer deformações
de valor indeterminado sem ser necessário um acréscimo do valor do parâmetro λ).
Deste modo, dado um perfil de carregamento através dos valores de Qi , o
carregamento máximo que a estrutura pode suportar é dado por (Qi )u = λu Qi .
•
Observações
(i) Os valores de λced e de λu costumam designar-se por “valor de cedência” e “valor
último” do parâmetro de carga λ.
51
Tracção e Compressão de Peças Lineares
(ii) Diz-se que uma estrutura se transformou num mecanismo quando as barras
onde ainda se não atingiu o esforço normal de plastificação constituem uma
estrutura hipoestática. Numa estrutura hiperstática de grau n este facto ocorre,
na maioria dos casos, quando se dá a plastificação (N=Npl) da (n + 1)-ésima barra.
No entanto, se não existir uma “boa distribuição” das barras em toda a
estrutura, a transformação em mecanismo pode corresponder a atingir-se o colapso
com menos que (n + 1) barras − um mecanismo deste tipo designa-se por
mecanismo local (ou parcial) da estrutura.
5.1
•
ANÁLISE ELASTO-PLÁSTICA
O objectivo da análise elasto-plástica de estruturas reticuladas consiste em estudar o seu
comportamento à medida que aumenta gradualmente o valor do parâmetro de carga λ
(i.e., se aumentarem as solicitações de valor variável), a partir do estado inicial
caracterizado por tensões e deslocamentos nulos (se não existirem solicitações de valor
constante) ou não nulos (se existirem solicitações de valor constante). Em particular,
pretende-se determinar:
(i) O valor de cedência do parâmetro de carga λced (também designado, de forma
abreviada e pouco precisa, por “carregamento de cedência” ou “carga de cedência”).
(ii) O valor último (ou de colapso) do parâmetro de carga λu (também designado, de
forma abreviada e pouco precisa, por “carregamento último” ou “carga última” ou
“carga de colapso”).
(iii)A história de deformação da estrutura, i.e., a evolução de um ou mais deslocamentos
à medida que o parâmetro de carga aumenta desde λ=0 até λ=λu − δ=δ (λ).
•
No caso geral, a análise elasto-plástica de uma estrutura reticulada envolve a consideração
das seguintes fases:
(i) Fase Elástica (0 ≤ λ ≤ λced). Nesta fase todas as barras da estrutura estão a trabalhar
em regime elástico, o que significa que a análise da estrutura se faz da forma já
apresentada anteriormente.
(ii) Fase Elasto-Plástica (λced < λ < λu). Nesta fase pelo menos uma das barras da
estrutura já atingiu o colapso ou está a trabalhar em regime elasto-plástico. Assim,
a análise da estrutura requer que, para cada valor de λ, se determine a sua
52
Tracção e Compressão de Peças Lineares
“configuração resistente”, i.e., que se identifiquem as barras que já atingiram o
colapso e/ou, no caso de barras heterogéneas com materiais em paralelo, quais os
materiais já plastificados. É necessário analisar todas as “configurações resistentes”
da estrutura desde a ocorrência da primeira cedência (λ=λced) até à sua transformação
num mecanismo (λ=λu). O comportamento de cada “configuração resistente” da
estrutura é elástico e o seu domínio de validade está associado a um acréscimo do
parâmetro de carga ∆λ.
Observação
O número de “configurações resistentes” que uma estrutura apresenta à medida que o
valor de λ aumenta está, obviamente, intimamente ligado ao seu grau de hiperstatia e
ao número de barras heterogéneas com materiais em paralelo que possui.
(iii) Fase Plástica ou Colapso (λ=λu). Nesta fase já se atingiu o colapso num número
suficiente de barras para que a estrutura se transforme num mecanismo, i.e., para
que a sua “configuração resistente” seja hipoestática. Deste modo, não é possível
equilibrar qualquer acréscimo de carga − podem ocorrer deslocamentos indefinidos a
carga constante.
•
Observe-se ainda que, quando λ >λced, ocorrem na estrutura deformações plásticas que
são, por definição, irreversíveis (ou permanentes). Daqui resulta, entre outras coisas, que
se se retirar um carregamento associado a λ >λced (λ >λced → λ=0) a estrutura não volta
ao seu estado inicial (i.e., possui deslocamentos diferentes dos que exibia antes de se
iniciar o carregamento). Este facto é uma consequência de o comportamento de uma
estrutura durante uma descarga (diminuição do valor de λ) ser sempre elástico (todas as
barras trabalham em regime elástico).
•
Observação
É importante referir que existe um outro tipo de análise de estruturas reticuladas formadas
por barras constituídas por materiais elasto-plásticos, o qual não será abordado nesta
disciplina (apenas na disciplina de Estruturas Metálicas) − a análise limite (ou análise
rígido-plástica). É uma análise mais simples, na medida em que envolve apenas
considerações de equilíbrio (i.e., não requer qualquer análise de deformação). Em
contrapartida, permite apenas calcular o valor da carga última da estrutura (λu) −
não se obtém qualquer informação relativa à fase elasto-plástica ou à deformação
da estrutura quando ocorre o colapso.
53
Tracção e Compressão de Peças Lineares
5.1.1 ESTRUTURAS ISOSTÁTICAS
•
Por definição, o colapso de uma estrutura isostática ocorre ao atingir-se a plastificação
da primeira das suas barras. Tem-se, então, que:
(i) Se a estrutura não possuir barras heterogéneas com materiais em paralelo não
existe fase elasto-plástica (λced=λu é a fronteira entre a fase elástica e a fase plástica).
(ii) Se a estrutura possuir barras heterogéneas com materiais em paralelo pode existir
fase elasto-plástica, a qual está associada à sucessiva plastificação dos materiais que
formam essas barras.
Exemplo Ilustrativo
Considere-se a estrutura isostática representada na Figura 5.1, a qual está submetida ao
carregamento indicado (carga P≡λ) e é constituída por uma barra rígida e duas barras
deformáveis (uma homogénea e a outra heterogénea − dois materiais dispostos em paralelo).
Pretende-se calcular o valor do deslocamento vertical do ponto de aplicação da carga P quando
a
b
a
b
e (b) σ ced
.
ocorre a cedência e o colapso da estrutura, para: (a) σ ced
= 12 σ ced
= 6 σ ced
Figura 5.1 − Exemplo ilustrativo − análise elasto-plástica de uma estrutura isostática.
a
σ ced
≡ 12 σ ced
b
(a) σ ced
≡ σ ced
AB
N ced
= N plAB = 6 σ ced A
CD
N ced
= 15 E A ×
σ ced
E
= 15 σ ced A
N CD
pl = 17 σ ced A
54
Tracção e Compressão de Peças Lineares
FASE ELÁSTICA
2P
= 15 σced A ⇒ P = 22.5 σced
3
P
= = 6 σced A ⇒ P = 18 σced A
3
N CD =
N AB
A
⇒ Pced = 18 σced A
Como a cedência ocorre primeiro na barra homogénea, tem-se que Pu=Pced
(i.e., não existe fase elasto-plástica), O colapso ocorre quando se atinge a cedência,
num estado caracterizado por:
(∆LAB )ced = (∆LAB )u = σ ced L
b
σ AB = σ ced = σ ced
E
(∆LCD )ced = (∆LCD )u = 4 σ ced L
a
a
σ CD
= 8 σ ced < σ ced
5 E
↓
valor relativo ao colapso da
estrutura (não à plastificação
da barra CD)
4
5
b
b
σ CD
= σ ced < σ ced
(δ E )ced = (δ E )u = 1 + 2 4 − 1 σced L = 13 σced L
(b) σ ced ≡ σ ced
b
35
E
15
E
a
σ ced
≡ 6 σ ced
AB
N ced
= N plAB = 6 σ ced A
CD
N ced
= 15 E A ×
6 σ ced
= 9 σ ced A
10 E
N CD
pl = 11σ ced A
FASE ELÁSTICA
2P
= 9 σ ced A ⇒ P = 13.5 σ ced
3
P
= = 6 σ ced A ⇒ P = 18σ ced A
3
N CD =
N AB
A
⇒
Pced = 13.5 σ ced A
55
Tracção e Compressão de Peças Lineares
Como a cedência ocorre primeiro na barra heterogénea com materiais em paralelo,
tem-se que Pu >Pced (i.e., existe fase elasto-plástica). A cedência ocorre num estado
caracterizado por:
3 σ ced L
4 E
b
σ AB = σ ced < σ ced
(∆LCD )ced = 3 σ ced L
a
a
σ CD
= 6 σ ced = σ ced
(∆LAB )ced
=
5
(δ E )ced
E
3
4
3
5
b
b
σ CD
= σ ced < σ ced
3 2 3 3 σ L 13 σ ced L
= + − ced =
20 E
4 3 5 4 E
Este estado constitui o estado inicial da fase elasto-plástica que se segue.
FASE ELASTO-PLÁSTICA
(∆LAB )ced
=
3 σ ced L
4 E
3
4
b
σ AB = σ ced < σ ced
∆P
3
= 6 1 − σ ced A ⇒ ∆P = 4.5 σ ced A
3
4
⇒ ∆P = 3σ ced A
2 ∆P
3
=
= 6 1 − σ ced A ⇒ ∆P = 3σ ced A
3
5
N AB =
N CD
Quando P = Pced + ∆P = 16.5 σ ced A ocorre a plastificação da barra CD e, por
consequência, o colapso da estrutura, a qual se transforma num mecanismo (a barra
rígida pode rodar livremente em torno do ponto B no sentido retrógrado − e.g., o
deslocamento do ponto E pode aumentar indefinidamente sem acréscimo de P).
56
Tracção e Compressão de Peças Lineares
(∆LAB )u = 3 σ ced L + 1 σ ced L = 11 σ ced L
4
6
E
12
E
E
(∆LCD )u = 3 σ ced L + 2 σ ced L = σ ced L
5
5
E
E
σ AB =
11
b
σ ced < σ ced
12
b
b
σ CD
= σ ced = σ ced
E
(δ E )u = 11 + 2 1 − 11 σ ced L = 35 σ ced L
12
3
12
36
E
E
DESCARGA
O estado inicial da estrutura corresponde aos valores associados ao seu colapso.
Esses valores são combinados com aqueles que resultam da descarga (aplicação de
P= −16.5 σced A), durante a qual a estrutura se comporta sempre elasticamente:
σ AB = −
11
σ ced
12
∆L AB = −
b
σ CD
=−
11 σ ced L
12 E
11
σ ced
15
∆LCD = −
a
σ CD
=−
11 σ ced L
15 E
66
σ ced
9
δE = −
143 σ ced L
180 E
Obtém-se assim estado final da estrutura, o qual equilibra uma carga aplicada
nula (P=0) e é caracterizado pelos valores:
σ AB = 0
b
σ CD
=
4
σ ced
15
4
3
a
σ CD
= − σ ced
57
Tracção e Compressão de Peças Lineares
N AB = 0
∆LAB = 0
b
a
N CD = 5 Aσ CD
+ Aσ CD
=0
∆LCD =
4 σ ced L
15 E
δE = −
8 σ ced L
45 E
5.1.2 ESTRUTURAS HIPERSTÁTICAS
•
O colapso de uma estrutura hiperstática de grau n ocorre, na grande maioria dos casos,
ao atingir-se a plastificação da (n + 1)-ésima das suas barras. Excepções são, por
exemplo, os casos em que:
(i) Não existe uma “boa distribuição” das barras em toda a estrutura − o colapso pode
ocorrer quando tiverem plastificado menos de (n + 1) das suas barras.
Ex:
n=2
Para ocorrer o colapso
da estrutura basta que
plastifique a barra AB
(ii) Várias barras plastificam simultaneamente − o colapso da estrutura pode ocorrer
quando plastificarem mais de (n + 1) das suas barras.
Ex:
•
n=1
O colapso da estrutura pode
ocorrer quando plastifica a
terceira barra (se esta for a
barra BD)
No caso geral de uma estrutura hiperstática de grau n tem-se:
(i) Se a estrutura não possuir barras heterogéneas com materiais em paralelo, a fase
elasto-plástica é constituída por n troços lineares.
(ii) Se a estrutura possuir barras heterogéneas com materiais em paralelo, a fase elastoplástica pode ser constituída por mais de n troços lineares.
58
Tracção e Compressão de Peças Lineares
•
Observação
Em (i) a determinação do troço linear de ordem m envolve a resolução de uma estrutura
hiperstática de grau (n − m).
Exemplo Ilustrativo
Considere-se a estrutura hiperstática representada na Figura 5.2, a qual está submetida ao
carregamento indicado (carga P≡λ) e é constituída por três barras deformáveis. Sabendo que a
análise elástica da estrutura fornece a solução (deixa-se como exercício a sua determinação)
N AD = N CD =
P
2+ 2
σ AD = σ CD =
1 P
2+ 2 A
∆LAD = ∆LCD =
δ D = ∆LBD =
N BD =
2
1+ 2
σ BD =
1 PL
1 + 2 EA
P
2
P
1+ 2 A
∆LBD =
2
PL
1 + 2 EA
2
PL
1 + 2 EA
pretende-se calcular o valor do deslocamento vertical do ponto de aplicação da carga P quando
AD
BD
CD
ocorre a cedência e o colapso da estrutura, para σ ced
= σ ced
= σ ced
≡ σ ced .
Figura 5.2 − Exemplo ilustrativo − análise elasto-plástica de uma estrutura hiperstática.
AD
BD
CD
N ced
= N ced
= N ced
= N plAD = N plBD = N CD
pl = σ ced A
N AD = N CD =
N BD =
2
1+ 2
(
)
P
= σ ced A ⇒ P = 2 1 + 2 σ ced
2+ 2
P = σ ced
(
)
2
A ⇒ P=
1 + 2 σ ced A
2
A
2
1 + 2 σ ced A
⇒ Pced =
2
(plastificação da barra BD)
(
)
59
Tracção e Compressão de Peças Lineares
(∆LAD )ced = (∆LAD )ced
=
(∆LBD )ced = σ ced L
= ∆LBD =
N AD = N CD =
σ ced A
2
σ AD = σ CD =
N BD = σ ced A σ BD = σ ced
E
(δ D )ced
2 σ ced L
2
E
σ ced L
E
FASE ELASTO-PLÁSTICA
N AD = N CD =
2
2
1
∆P = 1 − σ ced A ⇒ ∆P =
σ ced A
2
2
2
(
)
Quando P = Pced + ∆P = 1 + 2 σ ced A ocorre a plastificação das barras AD e
CD e, por consequência, a estrutura transforma-se num mecanismo (o ponto D
pode deslocar-se indefinidamente na vertical sem acréscimo de carga). Deste modo,
(
)
tem-se que Pu = 1 + 2 σ ced A .
(∆LAD )u = (∆LCD )u =
σ L
2 σ ced L
2 σ ced L
+
= 2 ced
2
E
2
E
E
N AD = N CD = σ ced A
(δ D )u =
2 (∆LAS )u =
σ AD = σ CD = σ ced
2 σ ced L
E
(∆LBD )u = (δ D )u = 2 σ ced L
E
(por compatibilidade)
DESCARGA
O estado inicial da estrutura corresponde aos valores associados ao seu colapso.
Esses valores são combinados com aqueles que resultam da descarga (aplicação de
(
)
P = − 1 + 2 σ ced A ), durante a qual a estrutura se comporta elasticamente:
60
σ ced
2
Tracção e Compressão de Peças Lineares
N AD = N CD = −
2
σ ced A
2
N BD = − 2 σ ced A
∆LBD = δ D = − 2
σ AD = σ CD = −
2
σ ced
2
σ BD = − 2 σ ced
σ ced L
E
∆LAD = ∆LCD = −
σ ced L
E
Obtém-se assim o estado final da estrutura, o qual equilibra uma carga aplicada
nula (P=0) e é caracterizado pelos valores:
2
σ ced A (tracção)
N AD = N CD = 1 −
2
(
)
N BD = 1 − 2 σ ced A (compressão)
(
∆LBD = δ D = 2 − 2
)σ E L
ced
2
σ ced
σ AD = σ CD = 1 −
2
(
)
σ BD = 1 − 2 σ ced
∆LAD = ∆LCD =
(
)σ E L
2 −1
ced
Observe-se que, após a um ciclo carga-descarga (P=0 → Pu >Pced → P=0), (i) a
estrutura exibe um deslocamento residual δD, correspondente à deformação plástica
que ocorreu durante a fase elasto-plástica (Pced < P ≤ Pu) e (ii) os esforços NAD,
NBD e NCD são auto-equilibrados (i.e., equilibram forças aplicadas nulas) − existe
compressão na barra BD (aquela que plastificou primeiro durante a carga) e tracção
nas barra AD e CD (aquelas cuja plastificação provocou o colapso da estrutura).
61
Download