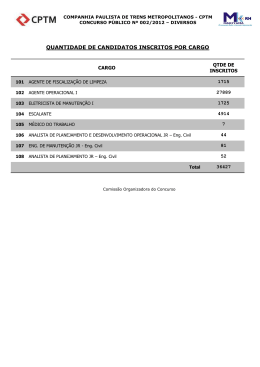
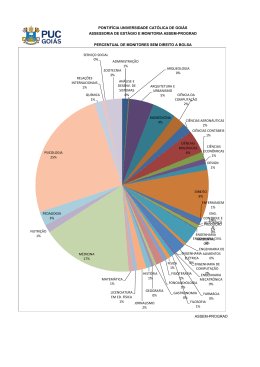
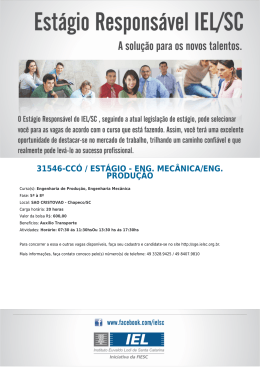
Robótica Industrial Prof. Daniel Hasse Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores sensores internos: - posição linear e angular - Velocidade linear e angular - Força e torque sensores externos: - Visão - Proximidade Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders • • • Podem medir: – Posição linear; – Posição angular (rotativo); Podem ser: – incremental ou absoluto; Características: – baratos; – simples; – confiáveis; – fácil de usar; – alta resolução. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders • Exemplos de discos de encoders: Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo • Princípio de funcionamento; • Exigem zeragem antes da utilização. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo • Configuração com offset de sensor; • Configuração com offset de disco. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo – Esquema físico V- 4.75 a 30 V Saída – 0,7 e 0,2 V (RS422) Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo – Esquema do circuito Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo – Esquema do sinal de saída Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo – Resolução 360º 4N onde: • N = número de traços; • 4 = quadratura do sinal. • Encoders com resolução de até 1 segundo de arco → 1.296.000 traços. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder incremental rotativo – Medição de velocidade – n número de contagem de subidas e descidas em um período T (segundos); – N = número de traços do encoder; – T = período de amostragem. 360n 90n (graus/seg ) t 4 NT NT 90 Re solução (graus/seg ) NT Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder absoluto rotativo • Princípio de funcionamento; • Não precisa “zerar” o sistema. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder absoluto rotativo • Exemplo de funcionamento encoder de 4 bits 1 2 3 4 Posição angular bits 0° 0000 22,5° 1000 45° 0100 67,5° 1100 ... ... Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder absoluto rotativo Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder absoluto rotativo – Resolução a 360º 2 n (graus) – n = número de bits: • Podem utilizar “gray code” no lugar do código binário. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Encoders Encoder Linear • Mesmo princípio de funcionamento dos encoders rotativos; • Podem ser incremental ou absoluto. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Resolvers • Usado para medição de posição angular. • Princípio de funcionamento indução eletro-magnética; • Características: – barato; – alta resolução; – simples; – eletrônica sofisticada. • Resolução típica dos resolvers é da ordem de 65.536 contagens por volta; Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Resolvers • Princípio de funcionamento: – Funciona como um transformador rotativo possui enrolamento primário e secundário; – Enrolamento secundário no estator é defasado de 90º; – Bobina primária ligada ao rotor é excitada por uma corrente alternada; – Bobinas do estator recebem o fluxo magnético da bobina do rotor girando e é induzida uma tensão nas mesmas; – Tensão induzida no enrolamento do estator é em forma senoidal. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Resolvers Princípio de funcionamento: O sinal de saída é senoidal amplitude depende da posição angular do disco rotativo; Freqüência da onda varia com a velocidade também mede velocidade de rotação; Saída analógica saída é geralmente convertida de analógica para digital (“resolver-to-digital”); Entrada: Vref; Saída: V1 =AVrefsen; V2 = AVrefcos. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Resolvers Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Sensores de força e torque Medem simultaneamente força e torque; Múltiplos eixos sensores de até 6 eixos: •Forças em x, y e z; •Torques em x, y, e z; Tecnologias: •Strain-gages; •Piezoelétrico. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Sensores de força e torque Princípio de funcionamento: Elemento flexível capaz de deformar nas 6 direções; Strain-gages medem deformações força e torque são proporcionais às deformações. Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Sensores – Sensores de força e torque Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Controlador Eletrônica de Controle Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Software / Programação .PROGRAM mont_conj.pg 1. APPROS peca1, 150 2. MOVES peca1 3. WAIT TIMER(-1) == 0 4. DELAY 0.5 5. CLOSEI 6. DEPART 150 7. APPROS peca1_mont, 150 8. MOVES peca1_mont 9. WAIT TIMER(-1) == 0 10. DELAY 0.5 11. OPENI 12. DEPART 150 13. APPROS peca2, 150 14. MOVES peca2 15. WAIT TIMER(-1) == 0 16. DELAY 0.5 17. CLOSEI 18. DEPART 150 19. APPROS peca2_mont, 150 20. MOVES peca2_mont 21. WAIT TIMER(-1) == 0 22. DELAY 0.5 23. OPENI 24. DEPART 300 .END Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Software / Programação Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial Software / Programação Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial IHM Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc Robótica Industrial IHM Prof. Eng. Anderson Harayashiki Moreira Prof. Eng. Fernando Silveira Madani, Msc
Download