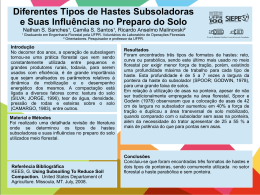
2. Sistemas Articulados 24 2. Sistemas Articulados 2.1- Sistema articulado plano Para os primeiros autores que escreveram sobre a teoria dos sistemas articulados, um tal sistema era composto por haste rígidas, sujeitas a mover-se num mesmo plano, ligadas entre elas por pivots normais ao plano de maneira a deixar variar os seus ângulos. Esta maneira de ver explica-se porque os primeiros aparelhos articulados como o pantógrafo, o paralelogramo de Watt, o aparelho de Peaucellier, eram formados por hastes ou rectas articuladas em que os pontos descreventes estavam sempre em linha recta com os pontos de articulação. Mais tarde, com Sylvester passamos a considerar a trajetória dum ponto invariavelmente ligado a uma haste e formar com ele um triângulo. Podemos, agora, considerar uma placa triangular em substituição de uma haste. Então, considerar uma simples haste é, no fundo, equivalente a ter uma placa plana que desliza sobre o seu próprio plano. Podemos, agora, dar a seguinte definição de sistema articulado plano: Conjunto de placas ou figuras planas sujeitas a mover-se sobre um só e mesmo plano que estão ligadas entre elas por pivots normais ao plano comum. Se três placas A,B,C são ligadas duas a duas pelos pivots, então formam um triângulo; elas constituem um sistema indeformável. 2.2- Sistemas de quatro membros Os sistemas de quatro membros são os mais simples dos sistemas articulados. No entanto, eles têm uma importância real pelo uso constante que deles fazemos no estudo de sistemas articulados mais complicados. Como vimos, podemos reduzir cada membro à haste rígida que junta os pivots aos quais se articulam os membros adjacentes. Quadrilátero articulado: Suponhamos que dispomos de quatro hastes de comprimentos a, b, c, d , que se articulam entre elas pelas suas extremidades e pela seguinte ordem: a haste a com a b, depois a b com a c, depois a c com a d e, por fim, a d com a a . Formamos, então, um quadrilátero articulado. Um quadrilátero articulado pode c D C apresentar três formas de aspectos diferentes. È sempre possível, em primeiro lugar, formar com as hastes, seguindo a ordem abcd , um b quadrilátero convexo ABCD. Seja C’ o c simétrico de C relativamente à diagonal BD, o B quadrilátero ABC’D então obtido é d b denominado quadrilátero uni-côncavo; ele é c formado pelas mesmas hastes seguindo a C' D' mesma ordem abcd . Seja, por fim, D’ o H θ simétrico de D relativamente à diagonal AC’, o d A quadrilátero ABC’D’, que chamamos quadrilátero cruzado (ou bi-côncavo), é igualmente formado pelas hastes precedentes e Figura 2.1: três formas de quadriláteros articulados. pela mesma ordem abcd . Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 25 Consideremos as hastes a e d que se articulam no ponto A, seja B a extremidade da haste a e D a extremidade da haste d . Chamaremos θ o ângulo BAD. Através do triângulo BAD, sabemos que: 2 BD = a 2 + d 2 − 2ad cosθ A haste b articula-se em B e a haste c em D. Obtemos C articulando as hastes b e c , isto é, C é o ponto de encontro dos círculos de centros B, D e raios b, c , respectivamente. Então, podemos escrever as seguintes desigualdades: 2 (b − c) 2 < BD < (b + c) 2 , ou então, (b − c) 2 < a 2 + d 2 − 2ad cosθ < (b + c) 2 . Podemos agora escrever: a 2 + d 2 − (b + c) 2 a 2 + d 2 − (b − c) 2 . < cosθ < 2ad 2ad Estas condições limitam, em geral, o valor do coseno do ângulo das hastes a e d , de modo que a revolução relativa das hastes em torno do seu pivot comum é limitada. Mas, se temos: a 2 + d 2 − (b + c) 2 ≤ −1 2ad 2 2 2 a + d − (b − c) ≥ 1 2ad o coseno pode receber todos os valores compreendidos entre − 1 e + 1 . Dizemos, então, que o pivot é de revolução completa; que o quadrilátero é, neste caso, construtível para todos os valores do ângulo θ . Das condições anteriores podemos escrever: (a + d ) 2 − (b + c) 2 ≤ 0 ⇔ (a + b + c + d )(a + d − b − c) ≤ 0 ⇔ a + d − b − c ≤ 0 e (d − a ) 2 − (b − c) 2 ≥ 0 ⇔ (d − a + b − c)(d − a + c − b) ≥ 0. Podemos chamar a a mais pequena das hastes a, d . Suponhamos, ainda, para fixar as idéias, b < c (o caso b > c é análogo). Resulta, então, que o factor d − a + c − b é positivo e as desigualdades reduzem-se a: a + d − b − c ≤ 0 e d − a + b − c ≥ 0. A primeira desigualdade escreve-se: ( a − b) + ( d − c ) ≤ 0 e a segunda d −c ≥ a−b. A primeira desigualdade é incompatível com a hipótese a > b , pois teríamos a − b e d − c positivos e, portanto, a sua soma não poderia ser negativa. Temos forçosamente a ≤ b e, como b < c, vem que a ≤ b < c; tínhamos suposto a < d , donde resulta que a é a mais pequena haste do quadrilátero. Teorema: Um pivot é de revolução completa quando pertence à haste mais pequena do quadrilátero e a soma da haste mais pequena com a maior é inferior ou igual à soma das outras duas. Se d é a haste maior, ela resulta da condição suposta anteriormente: a + d − b − c ≤ 0; Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 26 suponhamos, ao contrário, que seja c a haste maior, temos b < c e verifiquemos que nesta hipótese se tem: d −a+b−c ≥ 0 ⇔ a+c−b−d ≤ 0 que demonstra o teorema. Usamos a mesma demonstração se b é a haste maior. O recíproco deste teorema verifica-se e vai-nos conduzir a um resultado completo. Suponhamos que a mais pequena haste a, ligada à maior dão uma soma, no máximo, igual à das outras duas hastes. Vamos provar que os dois pivots situados sobre a haste mais pequena são de revolução completa. Seja, com efeito, d uma haste que se articula com a; é suficiente provar as desigualdades a + d − b − c ≤ 0 e (d − a ) 2 − (b − c) 2 ≥ 0 que exprimem que o pivot onde d e a se articulam é de revolução completa, porque a mesma demonstração se aplica ao outro pivot pertencente a a. Suponhamos que d é a maior das quatro hastes, temos então, por hipótese, a+d ≤ b+c ⇔ a+d −b−c ≤ 0 que é justamente a primeira desigualdade a verificar. Suponhamos, agora, b < c (o caso b > c é análogo). Como temos d > c e a < b então: d −a > c−b, onde d − a e c − b são positivos e elevados ao quadrado obtém-se: ( d − a ) 2 > (c − b) 2 que é a segunda condição. Façamos agora uma outra hipótese e suponhamos que a maior haste seja b ou c, c por exemplo. Tem-se, por hipótese, a + c − b − d ≤ 0 ⇔ a + d − b − c + 2(c − d ) ≤ 0 ; como c − d é positivo, então a + d − b − c terá de ser negativo, que era a primeira desigualdade a provar. Agora, temos da hipótese a+c−b−d ≤ 0 ⇔ c−b ≤ d −a que c − b e d − a são positivos e, portanto, (c − b ) 2 ≤ ( d − a ) 2 que é a segunda desigualdade a verificar. O caso em que b é a maior das quatro hastes trata-se de forma análoga. Assim, em resumo: Se um pivot dum quadrilátero é de revolução completa, então existe um segundo nas mesmas condições e estes dois pivots estão nas extremidades da haste mais pequena; a soma da mais pequena e da maior haste é, no máximo, igual à soma das outras duas hastes. Esta condição é necessária e suficiente para que exista pivots de revolução completa. O teorema é válido mesmo que se verifique a igualdade entre as duas somas. Vejamos agora se existem quadriláteros articulados que admitam mais de dois pivots de revolução completa. Neste caso, dois pivots opostos, A e C, por exemplo, são de revolução completa. Temos as seguintes condições para que A seja de revolução completa: a +d −b−c ≤ 0 ; 2 2 (d − a ) − (b − c) ≥ 0 Para que C seja de revolução completa terá de verificar: b+c−a−d ≤0 ; 2 2 (b − c) − (d − a ) ≥ 0 Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 27 Destas desigualdades obtemos que a+d −b−c = 0 . 2 2 (d − a ) − (b − c) = 0 Temos, então, dois casos a distinguir: a + d − b − c = 0 1º caso: ; d − a + b − c = 0 a + d − b − c = 0 2º caso: . d − a − b + c = 0 O primeiro caso dá-nos a = b e D d = c. Obtemos um quadrilátero no qual as duas hastes que se articulam em B são iguais e as duas hastes que se articulam em D também são iguais. Temos que as hastes A opostas são sempre diferentes. Um tal Β quadrilátero chama-se romboíde e pode ter uma das formas da figura 2.2. Suponhamos Α AB, BC as hastes mais pequenas, B C verificamos então que os pivots A,B,C são côncavo convexo de revolução completa, mas o pivot D é de Figura 2.2: Romboíde. revolução limitada. Examinando o segundo caso, verificamos que a = c e b = d . As hastes opostas do quadrilátero são iguais. O quadrilátero pode, então, ter uma das seguintes formas: D A D C B A Paralelogramo D C B contra-paralelogramo C Figura 2.3 Verificamos que, neste caso, todos os pivots do quadrilátero são de revolução completa. Três-barras: Consideremos o quadrilátero articulado ABCD. Se fixarmos uma das hastes, AB, por exemplo, o sistema constituído pelas outras três hastes tem o nome de três-barras. AD e BC são duas manivelas e CD é a biela. Se considerarmos um ponto, M, rigidamente ligado à biela CD então, durante a deformação, ele traça a curva da figura 2.4, que varia em função do comprimento das hastes. Figura 2.4: três-barras. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 28 2.3- Sistemas obtidos com um quadrilátero articulado 2.3.1- Paralelogramo O paralelogramo é um translador evidente do movimente circular. Uma utilização bastante conhecida do paralelogramo articulado é a do pantógrafo de P. Scheiner. Seja ABCD um paralelogramo articulado onde imaginamos os lados suficientemente prolongados. Consideremos quatro pontos P,Q,R,S fixos sobre AB,AD,BC e CD, respectivamente, desse paralelogramo. Suponhamos que esses quatros pontos se encontram em linha recta numa certa posição do paralelogramo. Vamos provar que, quando o paralelogramo se deforma, eles mantêm-se sempre em linha recta. Com efeito, porque estes quatro D pontos estão uma vez em linha recta, os segmentos constantes PA, AQ, PB, BR verificam a proporção: C PA PB = . S AQ BR R Agora, se esta proporção é sempre satisfeita, resulta inversamente que, em toda Q a posição do paralelogramo, os triângulos P APQ, BPR são semelhantes e, então, os A pontos P,Q,R estão em linha recta. A mesma demonstração para os pontos P,R,S mostra que os quatro pontos P,Q,R,S estão em linha recta. Notamos que, segundo a semelhança B constante dos triângulos APQ, BPR, CRS, os Figura 2.5: pantógrafo de P. Scheiner. comprimentos variáveis PQ, PR, PS mantém entre eles relações constantes. Fixamos P sobre o lado AB, se Q descreve uma figura, R descreve a figura homotética de BR centro P e de razão . AQ Vejamos agora um outro processo de obter um pantógrafo: o pantógrafo de Sylvester, que permite a realização de uma semelhança. Sobre a haste CD e BC dum paralelogramo articulado construímos dois triângulos semelhantes BEC, CDF nos quais os pares de ângulos iguais são: </ FDC =</ CBE , </ FCD =</ CEB , </ DFC =</ ECB. Suponhamos que fixamos o paralelogramo pelo seu pivot A e consideremos os dois triângulos BCE e CDF rígidos. Vamos provar que se fazemos o ponto E descrever uma figura, o ponto F descreve a F figura homotética, que terá rodado um ângulo constante. E A semelhança dos triângulos BCE e CDF dáC nos, com efeito, BC DF = B D BE DC e como BC = AD, DC = AB podemos escrever AD DF A = . BE AB Figura 2.6: pantógrafo de Sylvester. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 29 Como os ângulos em D e B dos triângulos FDA, EBA são iguais, essa proporção prova a semelhança deste dois triângulos e temos, por conseqüência, AF AD DF = = = constante. AE BE AB Podemos acrescentar que o ângulo </ FAE é igual ao ângulo constante </ CBE , porque o ângulo </ DAE, devido ao paralelismo de BC e AD, vale a soma dos ângulos </ AEB, </ CBE. Ora, concluímos que </ DAF =</ AEB e </ FAE =</ CBE como queríamos provar. O mesmo aparelho permite realizar uma rotação. Se o triângulo CDF e, por conseqüência, o triângulo CBE são isósceles, então AF é igual a AE. Portanto, quando o ponto E descrever uma figura, o ponto F descreverá a mesma figura só que rodada um ângulo constante α =</ FDC. Temos uma interessante aplicação do pantógrafo Sylvester na demonstração de um notável teorema de M. Roberts: A curva descrita por um ponto rigidamente ligado à biela de um três-barras pode ser obtida de duas outras maneiras por meio de outros dois três-barras. H Reparemos na figura 2.7. Suponhamos que E descreve um círculo de centro G e de raio EG, o ponto F descreverá um outro círculo de centro H e L G raio FH. Construímos os paralelogramos CEGK e K CFHL; unimos os pontos L e K. Então, formamos F um triângulo onde o ângulo </ KCL é igual ao E ângulo constante α =</ FDC =</ CBE =</ FAE. Com efeito, os dois raios homólogos EG, FH são paralelos C a KC, LC, que formam entre eles o ângulo α . Os lados KC, LC são constantes e, portanto, o triângulo KCL tem uma forma indeformável. Este triângulo é semelhante aos triângulos CDF e EBC. D Podemos considerar o ponto C do triângulo CDF ligado à biela FD no três-barras ADFH. Mas, podemos também ver que C é um vértice do A triângulo BCE ligado à biela BE no três-barras Figura 2.7: teorema de M. Roberts. ABEG; ou ainda notar que C é também vértice do triângulo LKC ligado à biela LK no três-barras GKLH. Assim se pode estabelecer a tripla geração de M. Roberts. B 2.3.2- contra-paralelogramo O contra-paralelogramo permite construir três tipos de mecanismos simples e célebres. Engrenagem elíptica: Seja ABCD um contra-paralelogramo onde fixamos a haste AB. Seja P a intersecção das hastes BC e AD. Então, temos que: PA + PB = AD e PD + PC = AD; isto prova que P descreve uma elipse de focos A,B. No plano móvel rigidamente ligado à haste CD, P descreve uma elipse de focos C,D. Faculdade de Ciências da Universidade do Porto Figura 2.8: engrenagem elíptica. Trabalho de monografia 00/01 2. Sistemas Articulados 30 A velocidade de C é ortogonal a BC e a velocidade de D é ortogonal a AD. P é, então, o centro instantâneo de rotação do movimento do plano móvel rigidamente ligado a CD relativamente ao plano fixo de AB. Resulta que a elipse de focos C,D rola sem deslizar sobre a outra. Engrenagem hiperbólica: Seja ABCD um contra-paralelogramo onde fixamos a haste AD. Seja Q a intersecção do prolongamento das hastes AB e CD. Então, temos que: QA - QD = AB e QC - QB = AB; isto prova que Q descreve uma hipérbole de focos A,D e, no plano móvel rigidamente ligado à haste BC, Q descreve uma hipérbole de focos B,C. Tal como no caso da engrenagem elíptica, estas duas hipérboles são iguais e a hipérbole de focos B,C rola sem deslizar sobre a outra. Figura 2.9: engrenagem hiperbólica. Inversor de Hart: Seja ABCD um contra-paralelogramo e P,Q,R,S quatro pontos fixos sobre as hastes AD,AB,CD e BC, respectivamente. Para uma certa posição do contra-paralelogramo, estes quatro pontos estão sobre uma recta paralela às diagonais AC e BD. Constatamos facilmente que esses pontos mantêm-se sempre sobre essa recta paralela às diagonais quando o contraparalelogramo sofre uma deformação. Os triângulos semelhantes APQ, ADB e DPR, DAC dão-nos: D B PQ BD PR AC = , = ; PD AD AP AD donde PA ⋅ PD PQ ⋅ PR = ⋅ BD ⋅ AC. 2 AD Q R S P Agora, fazemos BI paralela a DA; a figura AIBD é um paralelogramo tal que BD = AI e IBC é um triângulo isósceles, de A C I O modo que a perpendicular por B a IC dá-nos Figura 2.10: inversor de Hart. o ponto médio, O, de IC. Então, temos que: 2 2 BD ⋅ AC = AI ⋅ AC = (AO - OI)(AO + OI) = AO − OI , mas os triângulos retângulos BAO e BIO dão-nos 2 2 AB = AO + OB 2 2 2 2 BC = BI = OI + OB donde, por subtração, 2 2 2 2 2 AB − BC = AO − OI = BD ⋅ AC. Temos então, em definitivo, 2 2 PA ⋅ PD (AB − AD ). PQ ⋅ PR = 2 AD Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 31 Está assim provado que o produto PQ ⋅ PR é constante. Se sujeitarmos a haste AD a rodar em torno do pivot P e se fazemos o ponto Q descrever uma figura, o ponto R descreverá uma figura inversa da primeira. Demonstramos analogamente que o produto QP ⋅ QS é constante, de modo que se fazemos a haste AB rodar em torno do pivot Q, os pontos P e S descrevem agora duas figuras inversas, mas com potência negativa de inversão. 2.3.3- Romboíde Devemos a Reuleaux um outro dispositivo bastante interessante. Ele é conhecido como o duplicador de voltas de Reuleaux. Consideremos um romboíde no qual as duas hastes maiores BC = BA são o dobro das duas mais pequenas DA = DC. Fixamos uma das hastes pequenas, por exemplo DA, e fazemos rodar AB a partir da posição AB 0 , então DC está sobre DA. Quando B descreve o arco B 0 BB1 igual a B1 B 180º −60º = 120º , o ponto C descreve a semi-circunferência ACC1 . Quando em B2 C seguida B descreve o arco de 60º B1 B 2 C1 , o ponto C descreve a semicircunferência C1C 2 A. Ora, logo que AB ϕ está sobre AC1 , DC está de novo sobre θ C1 B0 A D DA. Assim, após meia volta de AB, DC fez uma volta completa. Constatamos facilmente em seguida que continuando C2 AB a sua volta, DC recomeça uma outra. Quando B está na posição simétrica de B1 relativamente a AD (B1' ) , DC estará B'1 de novo sobre DC1 . Finalmente, quando AB regressa a AB 0 , DC voltará P novamente a DA. Em resumo, após uma Figura 2.11: duplicador de voltas de Reuleaux. volta completa de AB, DC fez duas voltas. A teoria analítica deste aparelho é, de resto, das mais fáceis. Designamos por θ o ângulo de AB com AB 0 e por ϕ o ângulo de DC com DA. No triângulo ADB, o ângulo </ ADB vale 1 ϕ ϕ e o ângulo </ DBA vale θ − . Como DA = AB , temos que: 2 2 2 ϕ sin(θ − ) 2 = DA = 1 . ϕ AB 2 sin 2 Observamos que, no caso geral de um romboíde qualquer, se DA = d e AB = a , o mesmo método dar-nos-á: ϕ sin(θ − ) 2 = DA = d . ϕ AB a sin 2 Por fim, o centro instantâneo de rotação da barra BC é o ponto P, interseção de AB com CD. Então, P descreve, no plano fixo, um Limaçon de Pascal. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 32 2.4- Sistemas obtidos combinando os precedentes C 2.4.1- Translador e Reversor de Kempe D O translador de Kempe obtém-se considerando dois paralelogramos articulados ABCD e BPP’C que têm uma haste comum, BC. Fixamos a haste AD e se fazemos descrever uma figura no ponto P, então é claro que o ponto P’ descreve uma figura que se deduz da precedente por uma simples translação de PP' = AD . O reversor de Kempe permite-nos, dadas duas hastes ∆, ∆' articuladas em A, guiar uma terceira, ∆'' , articulada também em A de modo a mantê-la simétrica de ∆ relativamente a ∆' . Tomamos sobre ∆, ∆' dois comprimentos AB,AD, respectivamente, e encontramos o contraparalelogramo articulado ABCD. A introdução destas novas hastes não interfere em nada no movimento relativo das hastes ∆, ∆' . Tomamos em seguida sobre DC um comprimento DE tal que A DE DA = DA DC e encontramos o contra-paralelogramo articulado ADEF. Este novo contra-paralelogramo será, segundo a proporção anterior, semelhante ao primeiro e uma das suas hastes maiores coincide com uma das mais pequenas do outro. A haste AF ou ∆'' fará o mesmo ângulo que ∆' faz com ∆. O reversor de Kempe pode servir para realizar a simetria relativamente a uma recta ∆' . Suponhamos, com efeito, que temos dois reversores de Kempe: um permite-nos obter as hastes ∆ e ∆'' simétricas em relação a ∆' ; o outro, as hastes ∆ 1 e ∆'1' , independentes das primeiras, que também se articulam em A e são simétricas relativamente a ∆' . É claro que podemos construir sobre ∆, ∆ 1 , duma parte, e ∆'' , ∆'1' , da outra, dois paralelogramos articulados que se mantêm simétricos em relação ao eixo de simetria ∆' . A Os pontos M, M ' mantêm-se sempre simétricos. Os reversores permitem também obter a adição e subtração de ângulos. Se chamarmos a α o ângulo que ∆ 1 faz com ∆ e a β o ângulo que ∆'1' faz com ∆ , temos que ∆'' faz com ∆ um ângulo igual a α + β . A subtração de ângulos verifica-se de forma análoga. Faculdade de Ciências da Universidade do Porto P' B A P Figura 2.12: translador de Kempe. ∆'' ∆' F D ∆ B E C Figura 2.13: reversor de Kempe. ∆'' ∆''1 M' ∆' ∆1 β α M ∆ Figura 2.14: “simetrissor” de Kempe. Trabalho de monografia 00/01 2. Sistemas Articulados 33 O reversor pode ser considerado de um outro ponto de vista. Ele permite guiar uma haste ∆'' que faz com ∆ um ângulo duplo do ângulo que ∆ faz com ∆' . Então, ele pode servir como duplicador de ângulos. Mas podemos ir mais longe, sobre o contra-paralelogramo ADEF construímos um segundo, AFGH, da mesma forma que construímos ADEF a partir de ABCD. Obtemos o pivot G sobre EF tal que FG AF = . AF EF ∆'' ∆''' ∆' F ∆ D H B G E A A haste AH ou ∆''' faz com ∆ um C ângulo triplo do ângulo θ de ∆' com ∆ . A Figura 2.15: trissector de Kempe. este sistema articulado chamamos trissector de Kempe. Por fim, continuando a aplicar contra-paralelogramos de forma análoga, podemos guiar uma haste ∆( n ) articulada em A fazendo com ∆ um ângulo igual a nθ . Este método é conhecido como multiplicador de ângulos de Kempe. O problema da trissecção do ângulo não foi apenas estudado por Kempe. Pascal encontrou um interessante mecanismo para a sua resolução. Suponhamos que temos três hastes de comprimento igual, PA = AO = OB , que se Β articulam de acordo com a figura 2.16. O pivot P 2θ mantém-se fixo enquanto o pivot A se move; os A pivots B e O deslocam-se sobre as rectas PA e 2θ PO, respectivamente. Tem-se então um sistema articulado que permite resolver o problema da 3θ θ θ trissecção de um ângulo. Seja P’ o simétrico de P P O relativamente a O. Então, temos que o ângulo Figura 2.16: trissector de Pascal. </ BOP ' vale o triplo do ângulo </ BPO . 2.4.2- Inversor de Peaucellier Este inversor é, segundo a ordem histórica, anterior ao de Hart. Ele é composto por um losango BCDC ' e, aos pivots B e D, articulam-se duas hastes iguais AB e AD livres de rodar em torno do mesmo pivot A. Os pivots C,C’ estão alinhados sobre A. Então, tem-se 2 2 AC ⋅ AC ' = (AE + EC)(AE - EC) = AE − EC . Ora, os triângulos rectângulos ADE, DEC dão-nos 2 2 2 2 2 AE = AD − DE 2 2 2 , EC = DC − DE , donde 2 2 AC ⋅ AC ' = AE − EC = AD − DC = constante. Resulta que quando o pivot C descreve uma figura, o pivot C’ descreve uma figura transformada da primeira por raios vectoriais recíprocos. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 34 A grandeza relativa das hastes AD, AB e das hastes do losango não é importante. Poderemos então ter as hastes A ' D, A ' B mais pequenas que as do losango só que agora a potência de inversão será negativa. D' D C' A A' E C B Figura 2.17: inversor de Peaucellier. Podemos generalizar o inversor de Peaucellier substituindo o losango BCDC ' pelo romboíde BCD ' C ' . Recordemos que se num quadrilátero a soma dos quadrados de dois lados opostos é igual à soma dos quadrados dos outros dois lados, as diagonais desse quadrilátero são rectangulares. A condição é necessária e suficiente. Então, se deformarmos um tal quadrilátero, as suas diagonais mantêm-se rectangulares. É o caso do losango e do romboíde. Consideremos agora o romboíde BCD ' C ' e o quadrilátero de diagonais rectangulares ABCD ' que têm em comum as hastes BC e CD ' (Fig 2.17). As diagonais CC ' , CA estão sempre normais à diagonal comum BD ' , isto é, são sempre coincidentes. Constatamos então que o produto AC ⋅ AC ' é constante e, portanto, se C ' descreve uma curva qualquer, C descreve uma curva inversa desta relativamente a A. 2.5- Teorema de Kempe Com base nos seus simples aparelhos, que mostramos atrás (translador, reversor,...), Kempe criou a demonstração do seu notável teorema: Podemos sempre encontrar um sistema articulado onde um ponto descreve uma curva algébrica dada anteriormente, pelo menos localmente. Oy P Ν C q p ϕ Ο M θ Ox Figura 2.18. A demonstração deste teorema oferece um exemplo curioso de argumentos gerais que podemos fazer sobre os sistemas articulados. Seja dada uma curva algébrica C, P um dos seus pontos, O um ponto fixo do plano e Ox, Oy dois eixos rectangulares. Construímos um paralelogramo articulado onde os lados p, q terão comprimentos fixos e onde O, P serão dois pivots opostos. Quando o ponto P descrever a curva C, o paralelogramo deformar-se-á e os ângulos θ , ϕ que as hastes fazem com o eixo Ox variam mantendo-se estas ligadas por uma relação fácil de formar. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 35 Sejam x, y as coordenadas do ponto P, temos então que: x = p cosθ + q cos ϕ ; y = p sin θ + q sin ϕ logo, f ( x, y ) = 0 é a equação inteira e racional em x, y da curva C, f ( x, y ) poderá ser escrita sob a forma de um polinômio inteiro em cosθ , sinθ , cosϕ , sinϕ e, substituindo todas as potências de senos e cosenos pelas dos senos ou cosenos dos múltiplos dos arcos, chegamos à aplicação dessa equação sob a forma: (2.1) A cos (mθ ± nϕ + α ) = 0 ∑ onde m, n são inteiros, A um coeficiente positivo constante e o ângulo α designado seja 0, ± π 2 ou π . Como θ é o ângulo OM com Ox e ϕ é o de ON com o mesmo eixo, sabemos, por meio de reversores empregues como multiplicadores, aditores ou subtratores, realizar o deslocamento duma recta ∆ ( m , ± n ,α ) que se articula em O e faz com Ox o ângulo mθ ± nϕ + α , enquanto que OM e ON rodam em torno de O. Suponhamos, pois, construídos todos os eixos que correspondem cada um a um termo da equação (2.1). Agora, sobre cada um desses eixos a partir de O, encontramos um segmento OH ( m , ± n ,α ) cujo comprimento seja proporcional ao coeficiente A do termo cos(mθ ± nϕ + α ) na equação (2.1). A equação (2.1) exprime que a soma das projeções sobre Ox de todos os seus segmentos é nula. Para evitar a complicação das notações anteriores, denotemos por OG 1 , OG 2 , K , OG µ os segmentos precedentes. Sobre OG 1 construímos o paralelogramo articulado OG 1 L1 K 1 e depois o paralelogramo G'2 L2 articulado L1 K 1O ' G 1' ; o segmento O ' G 1' é constante, L1 G2 G1 G'1 igual e paralelo a OG 1 . Igualmente, construímos os dois paralelogramos OG 2 L 2 K 2 e K 2 L 2 G '2 G 1' ; o segmento G 1' G '2 será constante e equivalente ao K2 K1 O' O Figura 2.19. segmento OG 2 . Poderemos continuar assim e construir uma figura poligonal O ' G 1' G '2 K G 'µ -1G 'µ , do qual cada lado será equivalente a um dos segmentos OG 1 , OG 2 , K, OG µ . Poderemos, sem interferir no movimento das hastes OG 1 , OG 2 , K , OG µ , fixar o ponto inicial O ' . Posto isto, para que a equação (2.1) seja satisfeita, quer dizer para que o ponto P descreva a curva C, será necessário e suficiente que o ponto extremo G 'µ descreva a recta proveniente de O ' , perpendicular a Ox . Se, com efeito, isto acontece, a soma das projeções do contorno O ' G 1' G '2 K G 'µ sobre Ox será igual a zero. Ora, iremos ver que podemos sempre realizar por um sistema articulado o deslocamento rectilíneo de um ponto e, por conseguinte, obrigar o ponto G 'µ a descrever a recta considerada. O teorema está, pois, demonstrado. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 36 Uma época duvidou-se mesmo da possibilidade do deslocamento rectilíneo de um ponto. O teorema de Kempe resolveu logo uma questão que poderia ser objeto de uma dúvida maior, a do deslocamento de um ponto sobre uma curva algébrica de qualquer ordem. Ele fez, de resto, notar bem que jamais um sistema articulado não permitirá descrever uma curva transcendente, já que todas as relações que existem a cada instante entre as linhas e as distâncias dos pontos do sistema são de ordem essencialmente algébrica. 2.6- Problema do deslocamento rectilíneo 2.6.1- Soluções aproximadas J. Watt (1784): O deslocamento aproximado do movimento rectilíneo de um ponto pode-se realizar por um dos mais antigos sistemas articulados, o paralelogramo de Watt. Este mecanismo oferece uma aplicação do movimento do três-barras combinado com o pantógrafo de Scheiner. Consideremos o três-barras F ABCD em que os pivots A,D estão fixos e AB = CD . M é o ponto médio da biela C BC. Então, M descreve uma curva que se aproxima de uma recta quanto maior for o D comprimento das manivelas AB e DC E M relativamente a BC. Agora, prolonguemos a manivela DC de uma quantidade CF = DC e B encontremos o paralelogramo CFEB. Traçamos a linha imaginária ED; esta linha passa pelo ponto médio, M, da haste BC. Segundo a propriedade essencial do pantógrafo de Scheiner, o pivot E vai A descrever uma curva homotética à da Figura 2.20: paralelogramo de Watt. trajetória de M. A relação de homotetia é igual a 2 e D é o centro de semelhança. Portanto, o pivot E descreverá, sensivelmente, uma linha recta e a amplitude do seu deslocamento será o dobro da amplitude do deslocamento de M. Tchebychef (1850): C C P D P D A B A Consideremos o quadrilátero cruzado ABCD onde fixamos os pivots A e B. Temos a seguinte relação: AD = BC = 5a , AB = 4a , CD = 2a . O ponto médio P da haste CD irá descrever, aproximadamente, uma recta paralela à distância 4a de AB. B Figura 2.21: solução de Tchebychef. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 37 Roberts (1860): Seja ABCD um trapézio isósceles articulado no qual fixamos os pivots A e B. Consideremos a haste AB o dobro de CD e CPD um triângulo isósceles ligado invariavelmente à sua base CD. Temos, então: AD = BC = CP = PD ; O ponto P alcança o meio de AB. Logo que o sistema se deforma, o ponto P descreve uma curva que se confunde praticamente com o segmento AB. Vemos imediatamente que a curva passa pelos pivots A e B, assim como pelo ponto médio de AB. Esta aproximação é melhor que as anteriores. D C A B P Figura 2.22- solução de Roberts. 2.6.2- Soluções exatas A solução exata do movimento rectilíneo de um ponto foi resolvido por Peaucellier e, depois, por Lipkine, através de um mesmo aparelho. Observemos que todo o inversor fornece um meio de realizar o deslocamento rectilíneo de um ponto. É suficiente, com efeito, através de uma haste, obrigar um ponto a descrever um círculo passando pelo centro de inversão para que o ponto inverso descreva um segmento de recta. O inversor de Peaucellier e o de Hart fornecem, então, uma solução imediata do problema. Solução de Peaucellier-Lipkine: Obtém-se acoplando dois romboídes semelhantes. Se considerarmos o círculo de centro O e raio OC ' = OA , a potência de A relativamente a esse círculo vale: 2 C 2 AC ' ⋅ AC = AD − DC ; Assim, se C’ descreve um círculo passando por A, C descreve a recta inversa desse círculo no inversor de pólo A e potência 2 D C' B A O 2 AD − DC . Esta recta é perpendicular à recta por A e O. Figura 2.23- solução de Peaucellier-Lipkine. Soluções de Hart: A primeira solução de Hart consiste na utilização de um inversor de Hart. Temos, então, um contra-paralelogramo em que AB = CD e AD = BC . Se O, P, Q são três pontos fixos nas hastes AB, AD, BC, respectivamente, tal que OPQ é uma linha paralela a AC (e BD), então em qualquer posição do sistema articulado tem-se: OP ⋅ OQ = BQ ⋅ QC − AO ⋅ OB , que é constante. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 38 Agora, sendo O fixo, acrescentamos uma haste que permita mover P no círculo sobre O. Então, Q irá descrever uma linha recta. É uma solução que comporta um número mínimo de hastes. A C O P Q G B D Figura 2.24: primeira solução de Hart. A segunda solução de Hart, tal como a primeira, comporta cinco hastes para a resolução deste problema. Consideremos, então, AB = CD , P EF = BP = DP . B Estas cinco hastes são dispostas de tal maneira que os pivots A e C estão fixos e AC = AB . Agora, E está preso sobre AB, F está preso sobre CD e verificam: D E F BE = DF , 2 BE ⋅ BA = BP . Nestas condições, o ponto P descreve a mediatriz do segmento AC. A C Figura 2.25: segunda solução de Hart. Soluções de Kempe: A primeira solução utiliza dois contraparalelogramos semelhantes ABCD, ADEF tal que: AB = CD = AQ , AD = BC = EF , P B Q D 2 AF = DE = DA . DC E F C Resulta, então, que: </ QAD =</ BAD . Fixamos os pivots A e D. Obtemos o pivot P ligando-o a B e Q por duas hastes iguais. P irá, então, descrever uma recta. Faculdade de Ciências da Universidade do Porto A Figura 2.26: primeira solução de Kempe. Trabalho de monografia 00/01 2. Sistemas Articulados 39 A segunda solução de Kempe utiliza um losango OABC no qual fixamos os pivots B e C. Depois, construímos dois romboídes semelhantes OABR e OPQR tal que: B C R BR = OR = QR . Como os dois semelhantes, tem-se que: romboídes são Q 2 OP = PQ e OP ⋅ AO = OR . Resulta, então, que Q descreve a recta perpendicular a AC. A O P Figura 2.27- segunda solução de Kempe. 2.6.3- Dois outros problemas de Kempe sobre o movimento rectilíneo Movimento do paralelismo: G Obtém-se por uma combinação de romboídes semelhantes: ACGH = DFGI , BCGI = EFGH . Os pivots A, B, C estão alinhados e fixos. Os pivots D, E, F estão alinhados, pois resultam das igualdades: AC = AH = DF = DI , GC = GI = GH = GF , BC = BI = EF = EH , C F I B H E 2 CA ⋅ CB = CG . A haste DEF, paralela a ABC, tem um movimento de translação rectilíneo. A D Figura 2.28: movimento do paralelismo. Movimento do deslizamento: Obtém-se, também, por uma combinação de romboídes semelhantes: ACGH = DFGI e BCGJ = EFGK . Os pivots A, B, C estão alinhados e fixos. Os pivots D, E, F também vão estar alinhados, pois são satisfeitas as seguintes igualdades: AC = AH = DF = DI , GC = GH = GJ = GF = GI = GK , 2 BC = BJ = EF = EK , CA ⋅ CB = CG . Resulta, portanto, que a haste DEF desliza sobre a haste ABC. I H G J A B K C F E D Figura 2.29: movimento do deslizamento. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 40 2.7- Os movimentos e as transformações que um mesmo sistema articulado pode realizar Consideremos um sistema articulado de ligações completas. Então, podemos, com esse mesmo aparelho, obter vários movimentos e várias transformações. Comecemos por notar os vários movimentos que podemos realizar com um mesmo sistema articulado. Vejamos que podemos fixar qualquer um dos membros do sistema e considerar a trajetória de um ponto rigidamente ligado a qualquer um dos outros membros. Por exemplo, no caso do romboíde (Fig 2.30), fixando uma das hastes mais pequenas e considerando a trajetória do ponto P rigidamente ligado à biela BC, obtemos um Limaçon de Pascal. Se, por outro lado, fixarmos uma das hastes maiores, notamos que o ponto Q, rigidamente ligado à biela BC, descreve uma figura bastante diferente da anterior. Figura 2.30: movimentos distintos de um mesmo sistema articulado. Vimos também que, no caso do contra-paralelogramo, fixando a haste mais pequena ou a maior podemos obter uma elipse ou uma hipérbole, respectivamente (Fig 2.8 e 2.9). Portanto, o mesmo sistema articulado permite-nos realizar movimentos distintos. Agora, vejamos as várias transformações que podemos realizar com o mesmo sistema articulado. Fixamos então, por um pivot, o ponto O de um membro do sistema. Escolhemos de seguida um ponto M e um ponto N ligados cada um a um dos membros (ou mesmo servindo de pivot a dois ou vários membros do sistema). O ponto M será o ponto director e N o ponto que traça. Então, se fazemos o ponto director M descrever os contornos de uma figura, o ponto N traçará os contornos correspondentes à figura transformada. Ora, podemos escolher arbitrariamente os pontos O,M,N no sistema e realizar assim diversas transformações. Não são todas igualmente interessantes, mas em certos casos poderemos, com o mesmo sistema, obter vários resultados úteis. Assim, reparemos no contra-paralelogramo que nos permitia descrever uma elipse e uma hipérbole. Vimos também que Hart o utilizou como inversor fixando o ponto O sobre uma haste e prendendo sobre as duas hastes adjacentes dois pontos M,N que se mantém alinhados sobre O. Temos, então, que OM ⋅ ON = constante. Mas, em vez de fixar o ponto O, fixamos o ponto M, então a relação deduzida pode ser escrita da seguinte forma: MO(MN − MO) = k = constante e a relação entre MO e MN exprime uma transformação da forma: k ρ1 = ρ + ρ onde ρ , ρ1 são os raios vectoriais MO e MN. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 41 Podemos então descrever cúbicas circulares com eixo de simetria. Por exemplo, se o ponto O, considerado como ponto director, descreve uma recta ρ cosθ = p , o ponto N, considerado como traçador, descreve a cúbica circular k ( x − p )( x 2 + y 2 ) = x 2 ; p esta curva tem um ponto duplo e um Figura 2.31: outra transformação do inversor de Hart. eixo de simetria. Acabamos de ver que o mesmo aparelho, o inversor de Hart, permite-nos realizar várias transformações. De forma análoga, verifica-se que outros sistemas já estudados, como o inversor de Peaucellier ou os pantógrafos, permitem-nos obter figuras transformadas distintas. Reparemos ainda num outro aspecto bastante interessante. Nós sabemos guiar, por meio de um sistema articulado, o movimento rectilíneo de um ponto. Então, através do mesmo instrumento, saberemos realizar o deslocamento de uma figura plana sujeita à única condição de que uma das suas rectas desliza sobre um ponto fixo. Tomemos o aparelho de linha recta de Peaucellier. Suponhamos os dois pivots fixos O, O ' unidos por uma haste que constituirá com o duplo romboíde e a haste O ' B um sistema articulado tal que se fixamos o membro OO ' o ponto M descreverá uma recta perpendicular a OO ' . Esta recta intersecta o prolongamento de OO ' no ponto fixo Q. Agora, concebemos um segmento RR ' dessa recta que está rigidamente ligado ao aparelho. Então, Figura 2.32: deslocamento de placa uma sobre um ponto fixo. o segmento RR ' desliza sobre o ponto fixo Q. 2.8- Aplicação de sistemas articulados à resolução de equações e à representação de funções Fizemos notar que os sistemas articulados podem servir para representar funções ou resolver equações. Essa aplicação é essencialmente curiosa do que verdadeiramente prática. Fixamos uma haste ∆ de um sistema articulado de ligações completas. Um ponto M de um membro do sistema descreve uma curva que intersecta ∆ em certos pontos. As suas distâncias a um ponto tomado por origem sobre ∆ são racionais de uma certa equação algébrica. Então, se temos ∆ graduado, é suficiente notar que esses pontos de ∆ são alcançados por M através da deformação do sistema articulado. Conhecemos assim os racionais da equação proposta. Os coeficientes dessa equação são de parâmetros que figuram na definição do sistema articulado. Os racionais da equação constituem os valores de uma função algébrica desses parâmetros independentes e, a esse respeito, o sistema articulado fornece uma representação de Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 42 valores dessa função algébrica, pelo menos em certos limites de variação dos parâmetros. Se soubermos encontrar facilmente os comprimentos das hastes que permitem determinar os coeficientes da equação de valores numéricos dados e contidos em certos limites, então temos uma classe de equações resolúveis por meio do sistema articulado proposto. A este processo de resolução mecânica podemos, em primeiro lugar, apontar o inconveniente não fornecer, com uma fraca aproximação, os racionais procurados. Mas a este junta-se um outro. Vimos que, por vezes, os quadriláteros não permitem determinar as figuras completas. Assim, por uma deformação continua, o ponto M não descreverá uma parte da sua trajectória e poderá acontecer que o aparelho não forneça parte dos racionais que deveria encontrar. Vamos agora resolver mecanicamente uma equação do terceiro grau. C Consideremos um quadrilátero ABCD no qual prolongamos os lados AB e CD até c ao ponto de intersecção em E. Chamamos θ D o ângulo </ DEA e obtemos, então, as b f seguintes igualdades: d B a θ A Figura 2.33. 2 2 2 2 2 2 2 2 AD = ED + EA − 2ED ⋅ EA cosθ , E BC = EC + EB − 2EC ⋅ EB cosθ , donde, eliminando cos θ , vem: 2 2 2 2 (ED + EA − AD )EC ⋅ EB = (EC + EB − BC )ED ⋅ EA . Constatamos facilmente que esta equação é geral e independente da disposição dos pontos situados sobre uma mesma recta, tendo em conta que se atribui sinais contrários a dois segmentos opostos. Imaginemos que articulamos em A,B,C,D o quadrilátero e que fixamos a haste AB, prolongada. Um ponto E da haste prolongada CD descreve uma curva que intersecta AB em certos pontos. Vamos formar a equação que admite por racionais as distâncias do ponto E ao ponto A. Chamamos a, b, c, d aos lados AB,BC,CD,DA do quadrilátero, f a distância DE e x a distância AE (calculamos x positivamente no sentido BA). A equação deduzida é: [ ] ( f + c)( x 2 + f 2 − d 2 )( x + a ) = f ( x + a ) 2 + ( f + c) 2 − b 2 x, ou desenvolvendo, [ ] cx 3 + a (c − f ) x 2 − c( f 2 + d 2 ) + f (a 2 − b 2 + c 2 + d 2 ) x + a( f + c)( f 2 − d 2 ) = 0 . Podemos identificar esta equação com uma equação do terceiro grau do tipo: x + nx 2 + px + q = 0 . Suponhamos o caso particular onde n é nulo, que fará tomar f = c , pelo que as equações de identificação serão: 2( c 2 + d 2 ) + a 2 − b 2 = − p , 2a (c 2 − d 2 ) = q ; obtemos então que: q 4c 2 = b 2 − a 2 − p + a q 4d 2 = b 2 − a 2 − p − a Estas fórmulas permitem-nos conhecer c, d sendo a e b constantes. No entanto, se os 3 valores precedentes de c 2 , d 2 se tornam negativos é possível aumentar b de maneira a torná-los positivos. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados 43 2.9- Exemplos de curvas Lemniscate de Bernoulli: Podemos obter um lemniscate de Bernoulli através de dois sistemas articulados distintos. O primeiro (Fig 2.34), consiste em considerarmos um três-barras onde fixamos os pivots A,B e AB = CD = 2AD = 2BC . Então, o ponto médio P da biela CD traça a curva pretendida. O segundo (Fig 2.35), consiste num mecanismo em que fixamos os pivots A,B e AB = AD = 2BC = 2DC . Agora, obtemos P no prolongamento da haste CD em que C é o ponto médio de DP. Então, P traça um lemniscate de Bernoulli. Figura 2.35: segundo mecanismo. Figura 2.34: primeiro mecanismo. Oval de Cassini: Como indica a figura, um inversor de Peaucellier permite traçar uma oval de Cassini de pólos A e B. Os pontos Q, Q ' descrevem essa oval. Figura 2.36: Oval de Cassini. Limaçon de Pascal: Na primeira solução do movimento rectilíneo de Kempe (Fig 2.26), eram utilizados dois contra-paralelogramos semelhantes ABCD e ADEF. Agora, em vez de fixar os pivots A e D, vamos fixar os pivots E e F. Então, B irá descrever um Limaçon de Pascal. A figura mostra que, no caso de EC = 2BC , obtemos um cardióide. Figura 2.37: cardióide. Faculdade de Ciências da Universidade do Porto Trabalho de monografia 00/01 2. Sistemas Articulados Faculdade de Ciências da Universidade do Porto 44 Trabalho de monografia 00/01
Download