DJEISON BENETTI
UM ESTUDO SOBRE A TEORIA LOCAL DE CURVAS:
TRIEDRO DE FRENET
SINOP
2009
DJEISON BENETTI
UM ESTUDO SOBRE A TEORIA LOCAL DE CURVAS:
TRIEDRO DE FRENET
Trabalho de Conclusão de Curso apresentado à Banca Examinadora do
Departamento de Matemática - UNEMAT,
Campus Universitário de Sinop, como
requisito parcial para a obtenção do título
de Licenciado em Matemática.
Orientadora:
Prof. MSc. Chiara Maria Seidel Luciano Dias
Co-orientador:
Prof. MSc. Rogério dos Reis Gonçalves
SINOP
2009
DJEISON BENETTI
UM ESTUDO SOBRE A TEORIA LOCAL DE CURVAS: TRIEDRO DE
FRENET
Trabalho de Conclusão de Curso apresentado à Banca Examinadora do Departamento de Matemática - UNEMAT, Campus
Universitário de Sinop, como requisito parcial para a obtenção do título de Licenciado
em Matemática.
BANCA EXAMINADORA:
Prof. MSc. Chiara Maria Seidel Luciano Dias
Professora Orientadora
Unemat - Campus Universitário de Sinop
Prof. MSc. Rogério dos Reis Gonçalves
Professor Co-orientador
Unemat - Campus Universitário de Sinop
Prof. MSc. Rodrigo Bruno Zanin
Professor Avaliador
Unemat - Campus Universitário de Sinop
Prof. Dr. André Luis Christoforo
Professor Avaliador
Unemat - Campus Universitário de Sinop
Prof. MSc. Chiara Maria Seidel Luciano Dias
Presidente da Banca
Unemat - Campus Universitário de Sinop
SINOP
de
de 2009
AGRADECIMENTOS
Agradeço à Deus pela oportunidade de viver e estudar matemática e aos meus queridos pais
Araci e Leonir.
À todos os professores do departamento de Matemática que direta ou indiretamente contribuíram
para minha formação acadêmica. Em especial, agradeço ao professor Rogério do Reis Gonçalves,
à professora Chiara Maria Seidel Luciano Dias, ao professor Rodrigo Bruno Zanin e ao professor André Luis Christoforo que de modo irrestrito sempre me apoiaram e incentivaram.
À minha namorada Adriana e aos meus colegas Silmara, Silvana, Irineu e Polyanna.
À banca examinadora da monografia pela participação neste importante momento.
D. B.
RESUMO
BENETTI, Djeison. Um estudo sobre a Teoria Local de Curvas: Triedro de Frenet.Trabalho
de Conclusão de Curso (Graduação em Matemática) - Faculdade de Ciências Exatas. Universidade do Estado de Mato Grosso / Campus Universitário de Sinop. Sinop, 2009.
Neste trabalho aborda-se um dos temas clássicos da geometria diferencial: a teoria local de
curvas. Em particular, realiza-se uma pesquisa bibliográfica com ênfase as curvas espaciais e ao
triedro de Frenet. Para sua realização baseou-se principalmente em Tenenblat (1990), Picado
(2006) e Carmo (2008). De maneira geral objetiva-se desenvolver um material de estudo que
possa servir como fonte de pesquisa para acadêmicos que pretendem iniciar seus estudos nesta
área. Assim, neste trabalho discute-se principalmente qual é a importância do triedro de Frenet
e em quais circunstâncias contribui para a teoria local de curvas. Por fim, destaca-se o fato de
que o triedro de Frenet é um referencial móvel, no qual a partir dele é possível determinar duas
outras medidas: a curvatura e a torção, funções escalares que conforme Teorema Fundamental
da Teoria Local de Curvas são capazes de determinar por completo a forma de uma curva.
Palavras-chave: Geometria Diferencial. Teoria Local de Curvas. Triedro de Frenet. Curvatura.
Torção.
ABSTRACT
BENETTI, Djeison. A study about the Local Theory of Curves: Frenet’s Frame. Course
Conclusion Paper. (Graduation in Mathematics) - Faculty of Exacts Sciences. University of
Mato Grosso State. Sinop, 2009.
This work presents one of the classic themes of differential geometry: the local theory of
curves. In particular, we carried out a literature review with emphasis on space curves and
Frenet’s frame. To write this work, we were based mainly on Tenenblat (1990), Picado (2006)
e Carmo (2008). In general our goal is to develop a study material that can serve as research
source for scholars wishing to start their studies in this area. Thus, this paper discusses mainly
what is the importance of the Frenet’s frame and under what circumstances contribute to the local theory of curves. Finally, we highlight the fact that the Frenet’s frame is a moving reference
frame, from where it is possible to determine two other measures: the curvature and torsion,
scalar functions that as the Fundamental Theorem of Local Curve Theory are able to completely
determine the shape of a curve.
key-words: Differential Geometry. Local Theory of Curves. Frenet’s Frame. Curvature. Torsion.
SUMÁRIO
1
INTRODUÇÃO
6
2
PRELIMINARES
8
2.1
PRELIMINARES DE ÁLGEBRA LINEAR . . . . . . . . . . . . . . . . . . .
8
2.2
O ESPAÇO EUCLIDIANO R3 . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.3
UM POUCO SOBRE DIFERENCIABILIDADE . . . . . . . . . . . . . . . .
12
2.4
ASPECTOS HISTÓRICOS DA GEOMETRIA DIFERENCIAL . . . . . . . .
14
3
4
PROPRIEDADES DAS CURVAS PARAMETRIZADAS DIFERENCIÁVEIS ESPACIAIS
16
3.1
CURVAS PARAMETRIZADAS DIFERENCIÁVEIS . . . . . . . . . . . . . .
16
3.2
COMPRIMENTO DE ARCO E MUDANÇA DE PARÂMETRO . . . . . . . .
23
3.3
CURVAS REGULARES . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
O TRIEDRO DE FRENET E O TEOREMA FUNDAMENTAL DA TEORIA LOCAL DE CURVAS
30
4.1
CURVATURA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
4.2
TRIEDRO DE FRENET E TORÇÃO . . . . . . . . . . . . . . . . . . . . . .
36
4.3
AS FÓRMULAS DE FRENET . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.4
ISOMETRIA EM R3 E O TEOREMA FUNDAMENTAL DA TEORIA LOCAL DE CURVAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
42
APLICAÇÕES DO TRIEDRO DE FRENET
48
5.1
48
CARACTERIZAÇÃO DAS HÉLICES . . . . . . . . . . . . . . . . . . . . . .
5.2
CARACTERIZAÇÃO DE UMA HÉLICE CIRCULAR EM TERMOS DE CURVATURA E TORÇÃO POR MEIO DO SOFTWARE MATHEMATICA . . . .
6
CONCLUSÕES
50
58
Referências Bibliográficas
59
Apêndice A -- BREVE APRESENTAÇÃO DO SOFTWARE MATHEMATICA
60
1
INTRODUÇÃO
A matemática é uma ciência fundamental para o desenvolvimento de várias áreas do conhecimento humano. Ao servir como base para diversas ciências percebe-se, entre outras coisas,
a dimensão de sua importância e abrangência, não apenas como um campo de estudo isolado,
abstrato, mas também integrado à realidade e aos fenômenos da natureza. A geometria diferencial é mais uma dentre as inúmeras variedades de pesquisa do conhecimento matemático, e
como tal possui ampla aplicação.
De fato, conforme Picado (2006), muitos dos problemas que envolvem curvas e superfícies
fazem da geometria diferencial um amplo campo de pesquisa e estudo. As curvas e as superfícies são objetos que intuitivamente qualquer pessoa pode ver e parte das questões levantadas por
elas são óbvias e naturais. A geometria diferencial, por sua vez, se preocupa com a formulação
matemática de tais questões se utilizando das técnicas do cálculo diferencial.
Ao iniciar um estudo sobre curvas em geometria diferencial destaca-se, num primeiro momento, que em nossa graduação não se tem a oportunidade de estudar esta disciplina. Trata-se
de uma área até então desconhecida pelos acadêmicos do curso de Licenciatura em Matemática
da UNEMAT. Destaca-se também que em nossa biblioteca não encontram-se muitos materiais
ou livros sobre o assunto e, dentre os poucos que se encontram, em sua maioria apresentam um
linguagem matemática mais formal e elaborada.
Em virtude disso, explorar, conhecer e descobrir são fatores que motivaram para a realização de uma pesquisa sobre o tema. Além do mais, este trabalho possui um caráter introdutório
no qual busca-se elaborar, de forma clara e objetiva, um texto que possa auxiliar acadêmicos e
professores que queriam iniciar um estudo em geometria diferencial. Em particular, faz-se uma
abordagem do assunto que comporte, dentro de suas limitações, as principais ideias, definições
e considerações.
O desenvolvimento teórico é construído sobretudo de acordo com os autores Tenenblat
(1990), Picado (2006) e Carmo (2008) além, é claro, de outros que surgiram com o aprofundamento da pesquisa. A contribuição desses e de outros pesquisadores foi essencial para se conhe-
7
cer e explorar o tema e, assim, fundamentá-lo logicamente. Portanto, a pesquisa desenvolve-se
discutindo, basicamente, que tipos de curvas são objetos de estudo da geometria diferencial,
qual é a importância do triedro de Frenet e de que forma a curvatura e a torção determinam a
forma de uma curva.
De modo especial, neste trabalho destaca-se o emprego do triedro de Frenet, uma base
ortonormada que é obtida em cada ponto de uma curva regular. A partir das fórmulas de Frenet
determinam-se a curvatura e a torção chegando-se, assim, ao ponto mais interessante de nosso
estudo: a demonstração do Teorema Fundamental da Teoria Local de Curvas. Em seguida,
tem-se uma importante aplicação das fórmulas de Frenet com a caracterização das hélices, no
qual também faz-se um estudo, com auxílio do software Mathematica, de uma hélice circular
parametrizada por comprimento de arco.
2
PRELIMINARES
Neste capítulo são apresentadas algumas noções preliminares. Em particular, destacam-se
aquelas referentes ao espaço euclidiano R3 . Estas noções contribuirão para o estudo local das
curvas principalmente na obtenção das equações a partir do triedro de Frenet. Em seguida,
ressaltam-se alguns fatos que propiciaram o surgimento da geometria diferencial clássica e que
constituem hoje parte importante da história da matemática.
2.1
PRELIMINARES DE ÁLGEBRA LINEAR
Os resultados que se seguem são apenas abordados superficialmente, por isso recomenda-se
para maiores detalhes Hoffman e Kunze (1979) e Lima (2008), os quais foram consultados para
escrever esta seção.
Definição 1. Um espaço vetorial consiste de um corpo K de escalares e de um conjunto V de
objetos ou vetores. Nele estão definidas duas operações: a adição que a cada par de vetores
u,v ∈ V faz corresponder um novo vetor u + v ∈ V chamado de a soma de u,v, e a multiplicação
por escalar que a cada número α ∈ K e a cada vetor v ∈ V faz corresponder um vetor α v ∈ V ,
chamado o produto de α por v. Essas operações devem satisfazer, para quaisquer α, β ∈ K e
u, v, w ∈ V , os seguintes axiomas de espaço vetorial:
comutatividade: u + v = v + u;
associatividade: (u + v) + w = u + (v + w) e (α β ) v = α (β v);
vetor nulo: existe um único vetor 0 ∈ V , denominado vetor nulo, tal que v + 0 = v ∀v ∈ V ;
inverso aditivo: para cada vetor v ∈ V existe um único vetor −v ∈ V tal que v + (−v) = 0;
distributividade: (α + β ) v = α v + β v e α (u + v) = α u + α v;
multiplicação por 1: 1 · v = v.
9
Segue que todo conjunto V que satisfazer estas condições será chamado um espaço vetorial
sobre K ou, simplesmente, um K-espaço vetorial. É importante ressaltar que num K-espaço
vetorial todas as regras e operações usualmente empregadas nas manipulações numéricas ocorrem como consequência dos axiomas acima.
Uma das características principais de um espaço vetorial refere-se à obtenção de novos
vetores a partir de vetores dados.
Definição 2. Seja V um K-espaço vetorial. Um vetor v ∈ V é uma combinação linear dos
vetores v1 ,v2 , . . ., vn em V se existem escalares α1 , α2 , . . ., αn em K tais que
v = α1 v1 + α2 v2 + . . . + αn vn .
Em um dado espaço vetorial também é possível encontrar subconjuntos seus tal que sejam
eles próprios espaços vetoriais. Tais subconjuntos são chamados de subespaços vetoriais.
Definição 3. Seja V um K-espaço vetorial. Um subconjunto W ∈ V é dito subespaço vetorial
de V se satisfazer os axiomas de espaço vetorial.
Teorema 1. Um subconjunto não-vazio W de V é um subespaço de V se, e somente se, para
cada par de vetores w1 , w2 em W e cada escalar α em K, tem-se que o vetor αw1 + w2 ∈ W .
Exemplo 1. O conjunto {0} formado apenas pelo vetor nulo e o espaço V são exemplos de
subespaços, os chamados subespaços triviais de V . Segue também que todo subespaço é em si
mesmo um espaço vetorial.
Exemplo 2. Os únicos subespaços vetoriais de R2 são {0}, as retas que passam pela origem e
o próprio R2 .
Definição 4. Seja S um subconjunto do K-espaço vetorial V . O subespaço vetorial de V gerado
por S é formado por todas as combinações lineares
α1 v1 + α2 v2 + α3 v3 + . . . + αn vn
de vetores v1 ,. . . , vn ∈ S.
O subespaço W gerado por S ⊂ V , contém o conjunto S e é o menor subespaço de V que
contém S. Quando o subespaço W gerado por S coincide com V diz-se que S é um conjunto
gerador de V . Isso significa que todo vetor v ∈ V pode ser escrito como combinação linear
v = α1 v1 + α2 v2 + α3 v3 + . . . + αn vn
de vetores v1 ,. . . , vn ∈ S.
10
Exemplo 3. Seja v ∈ V um vetor não-nulo. O subespaço gerado por v ∈ V é a reta que passa
pela origem e contém v.
Exemplo 4. Os vetores canônicos e1 = (1, 0, 0, . . . , 0), e2 = (0, 1, 0, . . . , 0), . . . , en = (0, 0, . . . , 1)
constituem um conjunto gerador do espaço Rn . De fato, dado v = (a1 , a2 , . . . , an ) ∈ Rn , pode-se
escrever
v = a1 e1 + a2 e2 + . . . + an en .
Definição 5. Seja V um K-espaço vetorial. Um subconjunto β de V é dito linearmente dependente ou LD se existem vetores distintos v1 , v2 , . . . , vn em β e escalares α1 , α2 , . . . , αn em K, não
todos nulos, tais que
α1 v1 + α2 v2 + . . . + αn vn = 0.
Um conjunto que não é linearmente dependente é chamado linearmente independente ou, simplesmente, LI. Em outras palavras, isso significa que a combinação nula deste conjunto de
vetores é obtida apenas quando os escalares αi forem todos nulos.
Os espaços vetoriais de dimensão finita possuem uma estrutura algébrica simples dadas
pelas ideias de base e dimensão, pois uma vez fixadas uma base de um K-espaço vetorial ndimensional, seus elementos nada mais são do que combinações lineares de n vetores básicos.
Definição 6. Dado um K-espaço vetorial V . Uma base β de V é um conjunto linearmente
independente de vetores de V que gera o espaço V . O espaço vetorial V é de dimensão finita
se possui uma base finita.
A partir disso pode-se afirmar que todo vetor v ∈ V pode ser escrito, de modo único, como
combinação linear v = α1 v1 + α2 v2 + . . . + αn vn de elementos v1 , v2 , . . . , vn de β . Assim, se V
é um espaço vetorial de dimensão finita, então quaisquer duas bases de V tem o mesmo número
de elementos. Pode-se definir, então, a dimensão de um espaço vetorial como sendo o número
de elementos numa base de V .
Exemplo 5. Os vetores canônicos e1 = (1, 0, 0, . . . , 0), e2 = (0, 1, 0, . . . , 0), . . . , en = (0, 0, . . . , 1)
são LI. De fato, a1 e1 + a2 e2 + . . . + an en e = 0 implica necessariamente que a1 = . . . = an = 0.
Como também constituem um conjunto gerador do espaço Rn segue que formam uma base de
Rn .
Definição 7. Sejam V e W espaços vetoriais. Uma transformação linear T : V → W é uma
aplicação que associa a cada vetor v ∈ V um vetor T (v) ∈ W de modo que sejam satisfeitas,
11
para quaisquer u, v ∈ V e α ∈ K, as relações:
T (u + v) = T (u) + T (v),
T (αv) = αT (v).
2.2
O ESPAÇO EUCLIDIANO R3
Em especial, para o estudo das curvas, tem-se o espaço euclidiano R3 . O conjunto R3 =
{(x1 , x2 , x3 ) | xi ∈ R} é constituído por todas as sequências de ternas ordenadas de números
reais. Este conjunto munido das operações vetoriais de adição e multiplicação por escalar é um
R-espaço vetorial. Seus subespaços vetoriais são todos os subespaços de R2 , todos os planos
que passam pela origem e o próprio R3 .
O conjunto β = {(1, 0, 0), (0, 1, 0), (0, 0, 1)} é uma base de R3 , chamada a base canônica.
Além do mais, quaisquer três vetores linearmente independentes formam uma base para este
espaço vetorial e, reciprocamente, todas as suas bases são formadas por três vetores linearmente
independentes.
Seguem abaixo algumas definições e propriedades importantes referentes ao produto interno e ao produto vetorial usuais em R3 .
Definição 8. Dados dois vetores u e v de componentes u = (x1 , x2 , x3 ) e v = (y1 , y2 , y3 ), o
produto interno (ou produto escalar) de u e v é definido como sendo o número real dado por
hu, vi = x1 y1 + x2 y2 + x3 y3 .
Trata-se de um caso particular de produto interno, também designado normalmente como
produto interno canônico, satisfazendo as seguintes propriedades:
1. ∀v ∈ R3 e v 6= 0 hv, vi > 0,
2. ∀u, v ∈ R3 hu, vi = hv, ui,
3. ∀u, v, w ∈ R3 e ∀a, b ∈ R hau + bv, wi = a hu, wi + b hv, wi.
Estando definido em R3 um produto interno é possível associar-lhe uma norma, dita norma
euclidiana, tal que para u = (x1 , x2 , x3 ) tem-se
q
|u| = hu, ui = x12 + x22 + x32 .
1
2
Um vetor é dito unitário se |u| = 1. A norma ainda satisfaz as seguintes propriedades:
12
1. ∀v ∈ R3 e v 6= 0 |v| > 0,
2. ∀v ∈ R3 e ∀a ∈ R |av| = |a| |v|,
3. ∀u, v ∈ R3 |u + v| ≤ |u| + |v|.
Definição 9. Seja u e v vetores não-nulos, o ângulo θ entre u e v é a solução da equação
hu, vi = |u| |v| cos θ
satisfazendo 0 ≤ θ ≤ π.
Além do mais, dois vetores u e v são ditos ortogonais se hu, vi = 0 . Segue, então, que u e
v são ortogonais se, e somente se, u = 0 ou v = 0 ou o ângulo entre u e v é
π
2
. A base canônica
e1 = (1, 0, 0), e2 = (0, 1, 0) e e3 = (0, 0, 1) de R3 é formada por vetores unitários e dois a dois
ortogonais. Logo esta base também é dita uma base ortonormal ou, ainda, um referencial
ortonormal.
O produto vetorial de dois vetores, ao contrário do produto escalar, é um vetor, definido
somente para espaços com mais de duas dimensões.
Definição 10. Dados dois vetores u e v de componentes u = (x1 , y1 , z1 ) e v = (x2 , y2 , z2 ), o
produto vetorial de u e v, denotado por u × v é definido como o vetor de componentes
u × v = (y1 z2 − y2 z1 , −x1 z2 + x2 z1 , x1 y2 − x2 y1 ).
Uma das propriedades mais importantes do produto vetorial é que o vetor u × v é ortogonal
a u e v. O produto vetorial também satisfaz as segunites propriedades:
1. |u × v| = |u| |v| sin θ , no qual θ (0 ≤ θ ≤ π) é o ângulo entre u e v;
2. u × v = 0 se, e somente se, u e v são LD;
3. u × v = −(v × u);
4. (λ u) × v = λ (u × v).
2.3
UM POUCO SOBRE DIFERENCIABILIDADE
Os conceitos de limite e continuidade estudadas no cálculo para funções de uma variável
são introduzidos de maneira análoga para funções de duas ou mais variáveis. De particular
interesse para este estudo define-se:
13
Definição 11. Seja F : A ⊂ Rn → Rm uma função definida em um aberto A ⊂ Rn . Fixa-se p ∈ A
e v um vetor não nulo de Rn . A derivada direcional de F em p na direção de v é o vetor
F(p + tv) − F(p)
,
t→0
t
lim
quando este limite existe.
Definição 12. Se F : A ⊂ Rn → Rm é uma função diferenciável, então para p ∈ A a diferencial
de F em p é uma aplicação linear dF : A ⊂ Rn → Rm definida por
d
dFp (v) = (F(p + tv))
dt
t=0
A função F é diferenciável se F é diferenciável em p, para todo p ∈ A. Pode-se verificar
que se F é diferenciável em p, então para todo v ∈ Rn ,
F(p + tv) − F(p)
.
t→0
t
dFp (v) = lim
Assim, se F é diferenciável em p então a derivada direcional de F em p existe em qualquer
direção. Deste modo, pode-se entender dFp (v) como a aplicação que leva todo vetor p ao vetor
derivada direcional de p na direção de v. Além disso, pode-se mostrar que a aplicação linear
dFp é representada, nas bases canônicas de R2 e R3 , por uma matriz (matriz jacobiana) que
depende apenas das derivadas parciais em p das funções coordenadas de F.
Exemplo 6. Seja F : R2 → R2 tal que F(x, y) = (2x2 , xy), com (x, y) ∈ R2 . Vê-se que F é
diferenciável e que sua diferencial dFp em p = (x, y) é
dFp =
4x 0
y
!
x
Por exemplo,
dF(1,0) (3, 2) =
4 0
0 1
!
·
3
!
=
2
12
!
.
2
Se F : Rn → Rm é uma aplicação linear, então F possui derivadas de todas as ordens. Além
disso, para todo p ∈ Rn , dFp = F. De fato, se v ∈ Rn , então
F(p) + tF(v) − F(p)
F(p + tv) − F(p)
= lim
= F(v),
t→0
t→0
t
t
dFp (v) = lim
no qual a segunda igualdade é devido ao fato de F ser linear.
14
2.4
ASPECTOS HISTÓRICOS DA GEOMETRIA DIFERENCIAL
A geometria diferencial, em geral, é dividida em dois momentos: geometria diferencial
clássica e geometria diferencial moderna. A geometria diferencial clássica estuda as propriedades das curvas e superfícies no espaço euclidiano. Em síntese, é uma teoria local de
curvas e superfícies, no qual se estudam as propriedades locais, ou seja, o comportamento da
curva ou superfície na vizinhança de um ponto. A geometria diferencial moderna estuda o comportamento de toda a curva ou superfície a partir da influência das propriedades locais. Sendo
também descrita como uma teoria global de curvas e superfícies, seu estudo é mais completo e
abstrato, pois abrange espaços não-euclidianos de qualquer dimensão. Entretanto, destaca-se o
fato de que ambas baseiam-se no cálculo diferencial e integral.
A origem da geometria diferencial se deu no século XVII com a introdução dos métodos
do cálculo diferencial na geometria euclidiana. Cronologicamente, os conceitos iniciais sobre
curvas planas foram dados por Huygens (1629-1675) na obra "Horologium Oscillatorium" de
1667. Mais tarde Newton (1643-1727), em 1736, na obra "Geometria Analytica", foi quem
empregou pela primeira vez os métodos do cálculo diferencial nesta área. O estudo em geometria diferencial no espaço começaram com Clairaut (1713-1775) no trabalho "Recherche sur les
Courbes à Double Curvature" (1731), um trabalho que trata sobre curvas e superfícies. Em se
tratando do estudo das curvas, o método mais importante e até hoje utilizado, conhecido como
triedro móvel de Frenet-Serret, foi introduzido por Michel-Anye Lancret (1774-1807) em 1806.
O estudos em geometria diferencial de superfícies surgem com o estudo das geodésicas,
curvas de comprimento mínimo numa superfície. Em particular, destacava-se o estudo com a
superfície esférica, principalmente pelas aplicações na navegação e a necessidade de elaboração
de mapas cartográficos. Assim, segundo Picado (2006), em 1697 Jean Bernoulli (1667-1748)
colocou o problema de determinação da curva mais curta ligando dois pontos numa superfície convexa. Em 1698 Jacques Bernoulli (1655-1705) determinou as geodésicas nos cilindros,
cones e superfícies de revolução. A forma geral das equações das geodésicas numa superfície
foi obtida por Euler (1707-1783) em 1728. Foi Euler quem deu bases sólidas à teoria das superfícies em "Recherches sur la Courbure des Surfaces" (1760), no qual introduziu as chamadas
curvaturas principais de uma superfície num ponto.
Contudo, foi Gauss (1777-1855) em 1827, com "Disquisitiones circa superfícies curvas",
quem de fato elaborou um volume dedicado a geometria diferencial. Este trabalho foi desenvolvido em um espaço euclidiano, utilizando propriedades da trigonometria esférica, conhecida dos tempos das navegações, e que tem como referência a geometria de Euclides (BISPO;
15
MARTINS, 2005). Na verdade, segundo Carmo (1999), ele foi motivado por um problema de
Geodésia, pois Gauss foi encarregado do levantamento geodésico de uma região da Alemanha.
Isto exigia medir triângulo sobre a superfície da Terra, o que o levou a refletir sobre a influência
da forma da Terra nestas medidas. Para resolver este problema, ele generalizou a questão para
uma superfície qualquer e obteve, para triângulos geodésicos pequenos, o que é conhecido hoje
como Teorema de Gauss-Bonet, que é o resultado mais importante da geometria diferencial
clássica.
Em virtude disso, na obra "Disquisitiones circa superfícies curvas" encontra-se todo o desenvolvimento da teoria de Gauss para o estudo de uma superfície curva que culminaram com a
introdução de ferramentas que serviram de base para a geometria diferencial não-euclidiana. O
que mais tarde levou Riemann (1826-1866) a generalizações mais abstratas da ideia de geometria.
No Brasil, conforme Carmo (1999), a influência da filosofia de Augusto Comte (17981857) no século XIX retardou a introdução de idéias novas na matemática. Segundo Comte a
matemática estava pronta e acabada, e só restava aplicá-la. Esta atitude dogmática era aceita
na Escola Militar e nas poucas escolas de Engenharia que eram, naquela época, os lugares
onde se encontrava a matemática no Brasil. Aliado a este dogmatismo, a ausência de meios
de divulgação, o isolamento científico e a falta de estímulo social eram algumas das outras
dificuldades que se apresentavam. Assim, era muito difícil fazer qualquer pesquisa naquela
época. Contudo, ainda neste período, destacam-se alguns fatos importantes como a criação da
Faculdade de Filosofia, Ciências e Letras da USP em 1934 e a do CNPq em 1951. Deste modo,
lentamente as novas idéias da matemática foram se estabelecendo no Brasil.
A mudança de fato começou a acontecer quando realizou-se em Poços de Caldas o 1◦
Colóquio Brasileiro de Matemática em 1957, no qual sua influência foi decisiva para o futuro
da matemática brasileira. A partir daí iniciou-se um movimento que veio a ampliar de forma
significativa a sua pesquisa no Brasil. Em particular, conforme Carmo (1999), para a geometria
diferencial iniciou-se um novo período com a qualificação de muitos pesquisadores brasileiros
principalmente no exterior. Aliás, um dos aspectos deste período, é que todos os trabalhos de
brasileiros sobre este assunto, sem exceção, eram feitos no exterior. Portanto, era necessário
consolidar a pesquisa no Brasil, o que acontece a partir de 1970. Assim, ao fim do período de
1970 à 1983, estavam em pleno andamento os Programas de Pós-Graduação em geometria diferencial no IMPA, na USP e na UNICAMP. As teses eram, em geral, já publicadas em revistas
de circulação internacional, o que acabava por valorizar e prestigiar a pesquisa em matemática
no Brasil.
3
PROPRIEDADES DAS CURVAS PARAMETRIZADAS
DIFERENCIÁVEIS ESPACIAIS
Neste capítulo discute-se quais os tipos de curvas que são objetos de estudo da geometria
diferencial clássica. Em especial, culmina-se no conceito de curva regular parametrizada por
comprimento de arco que é, sem dúvida, o resultado mais importante para o desenvolvimento
da teoria local de curvas e para a determinação do triedro de Frenet.
3.1
CURVAS PARAMETRIZADAS DIFERENCIÁVEIS
Ao iniciar um estudo sobre curvas, convém se perguntar: o que é uma curva? E mais
especificamente, em se tratando de geometria diferencial: qual é o tipo ideal de curva a ser
estudada?
O fato é que todos possuem pelo menos uma ideia intuitiva sobre curva. Pode-se pensar,
então, uma curva como um conjunto de pontos no plano ou no espaço e com dimensão igual a
1. Assim, por exemplo, uma curva pode ser o gráfico de uma função real de uma variável, ser
uma figura feita com um único traço, sem tirar o lápis do papel, ou ainda descrever a trajetória
de uma partícula movendo-se no espaço. Uma curva, portanto, pode representar uma reta, uma
parábola, uma circunferência, uma elipse ou um traço qualquer.
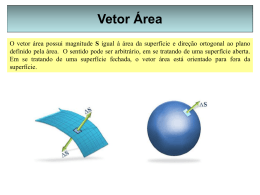
Figura 3.1: Exemplos de curvas.
Algebricamente uma curva pode ser descrita de maneiras diferentes, assim, y = x representa
uma reta, y = x2 representa uma parábola, x2 + y2 = 1 representa uma circunferência de raio
unitário e 12 x2 + y2 = 9 representa uma elipse. Muitas curvas como estas podem ser descritas
por meio de equações cartesianas, ou seja, no caso das curvas planas, tomando-se y como uma
17
função de x [y = f (x)], escrevendo-se x como uma função de y [x = g(y)] ou conhecendo a
relação entre x e y que considera y implicitamente como uma função de x [ f (x, y) = 0]. Mas
também pode-se considerar curvas em R3 , como é caso da reta que representa o eixo OY dada
por {(x, y, z) ∈ R3 |x = z = 0}.
Entretanto uma curva pode assumir diversas formas e, em consequência, nem sempre é possível descrevê-la por meio de uma equação cartesiana. Além disso, dependendo da necessidade,
uma curva muitas vezes é melhor descrita de uma maneira do que por outra. Deste modo, no
contexto da geometria diferencial, o objetivo é caracterizar as curvas como certos subconjuntos
de R3 aos quais possam ser aplicados os métodos do cálculo diferencial. Para tanto, uma curva
deverá ser vista como o caminho feito por um ponto a mover-se no espaço euclidiano R3 . Assim, ao invés de se ter curvas definidas por equações, serão consideradas curvas descritas por
funções do tipo vetoriais.
Definição 13. Uma função vetorial α de um subconjunto I de R em R3 , denotada por α : I ⊂
R → R3 , é uma correspondência que, para cada t ∈ I, associa α(t) ∈ R3 .
Isto significa que para todo número t ∈ I associa-se um único vetor denotado por α(t).
Uma função vetorial, então, é uma função cujo domínio é um conjunto dos números reais e
cuja imagem é um conjunto de vetores. Desse modo, uma função vetorial α : I ⊂ R → R3
pode ser representada por α(t) = (x(t), y(t), z(t)), no qual as funções reais x, y, z : I → R são
denominadas funções coordenadas ou funções componentes de α.
Um fato importante é que as funções vetoriais contínuas e as curvas espaciais estão intimamente relacionadas (STEWART, 2006). Sejam f , g e h funções reais contínuas em um intervalo
I e componentes de uma função vetorial γ . Então o conjunto P de todos os pontos (x, y, z) no
espaço para os quais
x = f (t) y = g(t) z = h(t)
e com t variando no intervalo I é dita uma curva espacial.
Deste modo qualquer função vetorial define uma curva espacial que é traçada pela ponta
do vetor em movimento. Assim, a curva espacial será descrita por uma função γ de parâmetro
t no qual γ(t) é o vetor da posição do ponto no instante t e a imagem dessa curva será um
subconjunto de R3 .
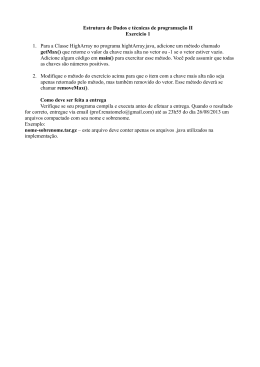
Na Figura 3.2, a curva é traçada pelo movimento de uma partícula cuja posição no instante
t é ( f (t), g(t), h(t)). Assim quando t varia, o ponto P( f (t), g(t), h(t)) também varia e traça
a curva. Curvas assim descritas, em função de um parâmetro t ∈ I, são chamada de curvas
parametrizadas.
18
Figura 3.2: Curva espacial descrita por uma função vetorial.
Definição
α :I→
R3
14. Uma
curva
parametrizada
em
R3
é
uma
função
vetorial
definida em um intervalo I de R. A imagem α(t), com t ∈ I, de uma curva
parametrizada α é chamada traço, rastro ou, ainda, caminho da curva.
Dessa forma é importante ressaltar que uma curva possui domínio, contradomínio e uma
aplicação associando a cada elemento do domínio com um no contradomínio. Trata-se, portanto, de pensar em uma curva não apenas como um conjunto de pontos no plano ou no espaço,
mas como uma função. A este conjunto de pontos, que na verdade é a imagem, ou seja, o
"desenho" da curva, será chamado de traço.
Conforme Cunha (2008), as propriedades geométricas de uma curva são as que dependem
somente de seu traço, enquanto as propriedades cinemáticas dependem não apenas do traço,
mas também da parametrização escolhida para a curva. Diz-se propriedades cinemáticas, pois
em muitos casos é natural considerar o parâmetro t como sendo o tempo e a curva como a
trajetória de algum ponto material.
Em Picado (2006), pode-se encontrar um exemplo no qual é possível compreender a importância da definição de curva como uma função de um parâmetro t e a diferença entre curva
e traço da curva. Então, suponha que uma formiga caminha de um ponto A até um ponto B e
que se marque em cada instante t, com o número t, a sua posição (começando com t = 0 em A).
Quando a formiga chegar a B estará traçado o caminho por ela percorrido. O mesmo efeito se
consegue ao seguir o rasto de uma lesma, mas agora sem marcar a sua posição em cada instante.
19
Figura 3.3: Rastro da formiga e da lesma, respectivamente.
Aparentemente, o rastro não mudou. No entanto, existe uma diferença significativa entre
ambas as representações. No rastro da lesma, por exemplo, não se pode dizer se ela esteve
parada durante algum tempo em algum ponto ou ainda se, em algum pedaço do caminho, o
percorreu várias vezes. Por estas razões, para o estudo de curvas, se está mais interessado na
função que representa a posição no instante t e não apenas no caminho, sem a sua evolução
ao longo do tempo. Em virtude disso, adota-se para a definição de curva o conceito de curva
parametrizada.
Além disso, a geometria diferencial clássica estuda as propriedades locais, ou seja, aquelas
que dependem somente do comportamento da curva na vizinhança de um ponto. Assim, ao se
falar em vizinhança de um ponto, deve-se assumir que a função α : I → R3 é sempre contínua.
Entretanto, existe uma outra situação que é fundamental no estudo de curvas. É necessário que
as funções além de serem contínuas sejam infinitamente diferenciáveis. De fato, ao assumir que
a função α é sempre contínua, claramente as figuras a seguir são alguns exemplos de imagens
de funções contínuas I → R3 :
Figura 3.4: Exemplos de imagens de funções contínuas.
Mas, existem certas funções que fogem muito à intuição que se tem sobre curvas. Em
1890 Peano (1858-1932) apresentou um exemplo de uma função contínua de [0, 1] em R2 , hoje
chamada Curva de Peano, cuja imagem preenche todo quadrado 0 ≤ x, y ≤ 1, contradizendo
aquilo que intuitivamente acredita-se ser uma curva. Portanto, para evitar exemplos como este
e permanecer próximo a intuição inicial, restringe-se o estudo apenas às curvas parametrizadas
infinitamente diferenciáveis.
20
Figura 3.5: Exemplo de função contínua: A curva de Peano.
Aqui, então, estende-se os conceitos do cálculo infinitesimal sobre continuidade e diferenciabilidade, válidos para funções reais que associam valores reais, para funções vetoriais. Assim, uma função vetorial é contínua se, e somente se, as suas funções componentes f , g e h são
contínuas. De modo análogo, será diferenciável se, e só se, f , g e h são funções diferenciáveis.
Se
a
função
vetorial
α : I → R3
é
diferenciável,
então
a
função
α 0 : I → R3 , para cada t ∈ I, que associa α 0 (t) = ( f 0 (t), g0 (t), h0 (t)) é também uma função
vetorial chamada derivada de primeira ordem de α. Se a função α 0 é também diferenciável
pode-se obter um nova função vetorial, chamada derivada de segunda ordem de α, denotada
por α”(t) = ( f ”(t), g”(t), h”(t)). De maneira geral, uma função vetorial é dita diferenciável de
classe C∞ se existem as derivadas de todas as ordens desta função.
Se α e β são funções vetoriais diferenciáveis em I e f é uma função real diferenciável em
I, então α + β , f α, hα, β i e α × β são diferenciáveis e
(α + β )0 = α 0 + β 0 ;
( f α)0 = f (α 0 ) + ( f 0 )α;
(hα, β i)0 = α 0 , β + α, β 0 ;
(3.1)
(α × β )0 = α 0 × β + α × β 0 .
A partir de agora, pode-se iniciar o desenvolvimento da teoria local de curvas no espaço
R3 . Uma primeira definição de curva que surge, ainda não inteiramente satisfatória, é o de
curva parametrizada diferenciável.
Definição 15. Uma curva parametrizada diferenciável de R3 é uma aplicação α, de classe C∞ ,
de um intervalo aberto I ⊂ R em R3 . A variável t ∈ I é o parâmetro da curva e o subconjunto
de R3 formado pelos pontos α(t), t ∈ I, é o traço da curva.
Observa-se, portanto, que uma curva parametrizada de R3 é um aplicação α : I → R3 que
para cada t associa α(t) = ( f (t), g(t), h(t)), t ∈ I, no qual f (t), g(t) e h(t) são funções diferenciáveis de classe C∞ . A partir disso verifica-se a seguir que:
Exemplo
7. A
aplicação
α(t) = (x0 + at, y0 + bt, z0 + ct),
t ∈ R,
no
qual
21
a2 + b2 + c2 6= 0 é uma curva parametrizada diferenciável, cujo traço é uma linha reta passando pelo ponto P0 (x0 , y0 , z0 ) e paralela ao vetor de coordenadas v = (a, b, c).
Figura 3.6: Reta.
De fato, dado uma reta r no espaço tridimensional, sua equação é determinada quando é
conhecido um ponto P0 (x0 , y0 , z0 ) em r e a direção de r, dada pelo vetor v = (a, b, c). A condição
a2 + b2 + c2 6= 0 garante que |v| 6= 0, caso contrário não seria possível determinar a reta, muito
menos a sua orientação. Além disso, as suas funções componentes são funções diferenciáveis.
Com efeito, seja f (t) = x0 + at. Como f 0 (t) = a, f 00 (t) = 0, f 000 (t) = 0, . . . , segue que f (t)
possui derivadas de todas as ordens, ou seja, é diferenciável de classe C∞ . Analogamente,
estendendo isso para as demais, facilmente vê-se que esta aplicação é uma curva parametrizada
diferenciável.
Exemplo 8. A curva cuja equação vetorial é representada por
α(t) = (r cost, r sint, at), com t ∈ R, r > 0 e a > 0,
é uma curva parametrizada diferenciável.
Seja x = r cost, y = r sint e z = at. Segue claramente que α é uma curva parametrizada
diferenciável. Além disso, tem-se que x2 + y2 = r2 (cos2 t + sin2 t) = r2 , logo a curva pertence
ao cilindro circular x2 + y2 = r2 . Nota-se, que o ponto (x, y, z) está diretamente acima do ponto
(x, y, 0), no qual as terceiras coordenadas diferem por um múltiplo de 2πa. A curva se move no
sentido anti-horário em torno da circunferência x2 + y2 = r2 no plano xy. Como z = at, a curva
faz uma espiral para cima ao redor do cilindro quando t aumenta. Essa curva é chamada hélice
circular.
22
Figura 3.7: Hélice circular
Exemplo
9.
(x − a)2 + y2
= a2
A
curva
de
com a esfera
Viviani
x2 + y2 + z2
formada
pela
intersecção
do
cilindro
= 4a2
e que pode ser parametrizada por
t α(t) = a 1 + cost, sint, 2 sin
2
é outro exemplo de curva parametrizada diferenciável.
Figura 3.8: Curva de Viviani.
Exemplo 10. A aplicação α : R → R2 dada por α(t, |t|) não é uma curva parametrizada diferenciável, pois |t| não é diferenciável em t = 0.
23
Figura 3.9: Exemplo de curva parametrizada, mas não diferenciável.
3.2
COMPRIMENTO DE ARCO E MUDANÇA DE PARÂMETRO
Um dos problemas iniciais que se coloca ao estudo de curvas é referente a determinação
do comprimento de uma curva. Inicialmente, para determinar uma fórmula que permita este
cálculo, convém dividir uma curva em vários segmentos. Seja então α uma curva definida num
intervalo fechado [a, b] e com uma partição a = t0 = t1 = . . . = tm = b arbitrária desse intervalo.
Ao se unir os pontos α(ti−1 ) e α(ti ), com i = 1, · · · , m, por segmentos de reta obtém-se uma
linha poligonal sobre a curva.
Figura 3.10: Linha poligonal sobre uma curva.
O comprimento da linha poligonal é obtido pelo somatório
m
∑ |α(ti) − α(ti−1)| ,
i=1
ou seja, o comprimento da linha poligonal é a soma dos comprimentos de todos os segmentos de
reta que unem α(ti−1 ) a α(ti ) nos intervalos [ti−1 ,ti ], com 1 ≤ i ≤ m. Dessa forma, quanto maior
for o número de intervalos dessa partição, melhor o somatório deve representar o comprimento
da curva, ou seja, melhor se aproxima de seu comprimento real. Considerando ti −ti−1 tendendo
a zero, segue que o limite desse somatório é dado pela integral
a seguinte definição:
Rb
a
|α 0 (t)| dt. Deste modo, tem-se
24
Definição 16. A aplicação
Z t
α 0 (t) dt
s(t) =
t0
é denominada função comprimento de arco da curva α a partir de t0 .
Mas, além da determinação do comprimento de uma curva, um outro fato importante é que
uma única curva pode ser representada por mais de uma função vetorial.
Exemplo 11. A cúbica retorcida α(t) = (t,t 2 ,t 3 ) para 1 ≤ t ≤ 2 poderia ser representada
também pela função γ(u) = (eu , e2u , e3u ) para 0 ≤ u ≤ ln 2 no qual a relação entre os parâmetros
é dada por t = eu .
Este fato motiva a seguinte definição:
Definição 17. Sejam I e J intervalos de R, α : I ⊂ R → R3 uma curva e h : J → I uma função
diferenciável (C∞ ), cuja derivada de primeira ordem é não nula em todos os pontos de J e tal
que h(J) = I. Então a função composta β = α ◦ h : J → R3 é uma curva que tem o mesmo traço
que α, chamada reparametrização de α por h. A função h é dita mudança de parâmetro.
Exemplo 12. Seja a cúbica retorcida α(t) = (t,t 2 ,t 3 ) para 1 ≤ t ≤ 2 e h(u) = eu para 0 ≤ u ≤
ln 2. A reparametrização de α por h é a curva γ(u) = α ◦ h(u) = (eu , e2u , e3u ).
Seguem as observações:
1. A inversa de uma mudança de parâmetro ainda é uma mudança de parâmetro. Se γ = α ◦h
é uma reparametrização da curva α, tem-se também que α é uma reparametrização de γ;
2. Duas curvas que são reparametrizadas uma da outra possuem o mesmo traço, logo terão
as mesmas propriedades geométricas;
3. Em qualquer mudança de parâmetro h : J → I, os intervalos I e J são do mesmo tipo,
simultaneamente abertos, fechados ou semi-abertos. Tal fato se justifica pois, tendo h
derivada de primeira ordem não nula, a restrição h : J → I é uma função estritamente
crescente ou decrescente e sendo h(I) = J segue, das duas afirmações, que h é injetora e
sobrejetora. Logo h é bijetora. Portanto, se γ é uma reparametrização de α por h, então
α é uma reparametrização de γ por h−1 .
4. O fato de h0 nunca se anular implica que h0 (t) > 0 ∀t ∈ J ou h0 (t) < 0 ∀t ∈ J. Logo,
no primeiro caso diz que a reparametrização por h preserva a orientação da curva e no
segundo caso que inverte a orientação.
25
Exemplo 13. A função vetorial α(t) = (cost, sint) para t ∈ [0, 2π] é uma parametrização para
a circunferência x2 + y2 = 1. Outra parametrização é γ(t) = (sin 2t, cos 2t) com t ∈ [0, π]. Para
verificar que γ é uma reparametrização de α, pode-se encontrar uma mudança de parâmetro
λ tal que (cos λ (t), sin λ (t)) = (sin 2t, cos 2t). Uma solução possível é λ (t) =
π
2
− 2t.
O traço de α e γ é a circunferência de raio unitário. Entretanto, em α quando t aumenta de 0
até 2π, o ponto (x, y) = (cost, sint) se move ao redor do círculo no sentido anti-horário partindo
do ponto (1, 0). Por sua vez, em γ quando t aumenta de 0 à π, o ponto (x, y) = (sin 2t, cos 2t)
começa em (0, 1) e se move ao redor do círculo no sentido horário. Houve uma uma mudança
na orientação pois λ 0 (t) = −2 < 0 ∀t.
Figura 3.11: (a) Curva α. (b) Curva γ.
Como o comprimento de arco é uma propriedade geométrica espera-se que sua medida não
dependa da parametrização. Fato confirmado pela proposição:
Proposição 1. Seja β : [c, d] → R3 uma reparametrização da curva α : [a, b] → R3 . Então os
comprimentos de α e β coincidem.
Existe uma outra relação entre comprimento de uma curva e a sua parametrização. Em
muitas situações é frequentemente útil parametrizar uma curva em relação ao comprimento de
arco, pois o comprimento de arco aparece naturalmente da forma da curva e não depende do
sistema de coordenadas utilizado (STEWART, 2006).
Se uma curva γ(t) já está dada em termos de um parâmetro t e s(t) é a função comprimento
de arco, pode-se escrever t como uma função de s, ou seja, t = t(s). A curva pode então ser
26
reparametrizada em termos de s substituindo-se o parâmetro t, logo γ(t) passa a ser γ(t(s)).
Assim se s = 3, por exemplo, γ(t(3)) é a posição do ponto que está a três unidades de comprimento do início da curva. Este processo é conhecido como parametrização por comprimento de
arco. Mais precisamente segue a definição:
Definição 18. Uma curva α : I ⊂ R → R3 é dita parametrizada pelo comprimento de arco, se
para cada t0 , t ∈ I, t0 ≤ t o comprimento do arco da curva α de t0 a t é igual a t − t0 . Isto é
s(t) =
Z t
α 0 (t) dt = t − t0 .
t0
Disto resulta imediatamente que:
Proposição 2. Uma curva α : I ⊂ R → R3 está parametrizada pelo comprimento de arco se, e
somente se, ∀t ∈ I, |α 0 (t)| = 1.
Exemplo 14. A curva representada por α(t) = (− sint, cost) é uma curva parametrizada por
comprimento de arco.
De fato, conforme se verifica
Z tq
Z tp
Z t
2
2
2
2
s(t) =
(− sint) + (cost) dt =
sin t + cos t dt =
dt = t − t0 .
t0
t0
t0
E considerando a Proposição 2 tem-se
p
0 q
α (t) = (− sint)2 + (cost)2 = sin2 t + cos2 t = 1.
Exemplo 15. (Reparametrizando curvas por comprimento de arco)
Seja a curva espiral logarítmica definida por γ(t) = (et cost, et sint), com t ∈ [0, +∞). Para
reparametrizá-la pelo comprimento de arco deve-se inicialmente calcular seu comprimento de
arco. Assim, segue que
γ 0 (t) = et (cost − sint), et (sint + cost) ,
0 2
γ (t) = e2t (cost − sint)2 + e2t (sint + cost)2 = 2e2t .
Logo, o comprimento de arco de γ a partir do ponto γ(0) = (1, 0) é dado por
Z t√
2e2u du =
s(t) =
√ t
2(e − 1).
0
Assim, escrevendo t em função de s tem-se t =
em
β (s) =
√s
2
+ 1 , que ao ser substituído em γ resulta
!
s
s
s
s
√ + 1 cos ln √ + 1 , √ + 1 sin ln √ + 1
,
2
2
2
2
27
no qual β é uma reparametrização por comprimento de arco de γ.
O estudo de uma curva simplica-se quando ela está parametrizada por comprimento de
arco. Mas quais curvas admitem reparametrização por comprimento de arco? Esta questão será
respondida na próxima seção.
3.3
CURVAS REGULARES
Definição 19. Seja α(t) = (x(t), y(t), z(t)), com t ∈ I ⊂ R, uma curva parametrizada diferenciável. O vetor tangente a α em t ∈ I é o vetor α 0 (t) = (x0 (t), y0 (t), z0 (t)).
A derivada de uma função vetorial é definida de modo semelhante às funções reais, ou seja,
d
α(t + h) − α(t)
α = α 0 (t) = lim
.
h→0
dt
h
Deste modo, uma interpretação para o vetor tangente pode ser dada a seguir: se os pontos P0 e
→
P1 tem vetores de posição α(t) e α(t + h) então P0 P1 representa o vetor α(t + h) − α(t), que
pode ser visto como o vetor secante. Se h > 0, o múltiplo escalar 1h (α(t + h) − α(t)) tem a
mesma direção e o sentido que α(t + h) − α(t). Quando h tende a zero parece que esse vetor se
aproxima de um vetor que está sobre a reta tangente. Por esta razão este vetor é chamado vetor
tangente à curva definida por α no ponto P0 .
Figura 3.12: (a) Vetor Secante α(t + h) − α(t). (b) Vetor tangente α 0 (t).
O vetor tangente em um ponto de uma curva traz duas informações importantes. Uma de
caráter estritamente geométrico: sua direção é tangente a curva. A outra informação, de carater
cinemático, refere-se ao sentido e a intensidade, que variam dependendo da parametrização
28
adotada para a curva. Deste modo, o vetor α 0 (t) também é chamado vetor velocidade e sua
magnitude ou norma é a velocidade escalar ou, ainda, a rapidez.
Para o desenvolvimento da teoria local das curvas é preciso que exista uma reta tangente
a uma curva α para cada valor do parâmetro t. Para tanto é suficiente que o vetor tangente a
α seja não nulo para todo t. Se faz necessário então restringir o estudo apenas às curvas que
satisfazem esta condição.
Definição 20. Uma curva parametrizada diferenciável α : I ⊂ R → R3 é dita curva regular se
para todo t ∈ I tem-se α 0 (t) 6= 0.
Exemplo 16. Seja o vetor de posição de uma partícula que se move em um plano descrito por
γ(t) = (1 + t 3 ,t 2 ), conforme Figura 3.13. Deseja-se determinar a velocidade e a rapidez da
partícula no instante t = 0. A velocidade para um instante t é dada por v(t) = γ 0 (t) = (3t 2 , 2t).
Quando t = 0, tem-se v(0) = (0, 0). A rapidez é |v| = 0.
Note que quando t varia, para valores maiores e menores que zero, tem-se diferentes
posições para a partícula e em cada uma delas estão associados diferentes vetores tangentes.
√
Por exemplo, para t = −1, v(−1) = (3, −2) e |v(−1)| = 13. Para t = 1, v(1) = (3, 2) e
√
√
|v(1)| = 13. Para t = 2, v(2) = (12, 4) e |v(2)| = 4 10.
Figura 3.13: Curva γ descrita pelo movimento da partícula.
Curvas regulares são aquelas cujo vetor tangente nunca se anula e por isso têm uma direção
tangente bem definida em cada instante. Portanto, pode-se concluir que a curva do exemplo
acima não é regular, pois em t = 0 não há como definir um vetor tangente.
Existe uma relação entre a regularidade de uma curva e a existência de reparametrizações
por comprimento de arco desta curva. Inicialmente segue uma primeira propriedade das curvas
regulares:
Proposição 3. Qualquer reparametrização de uma curva regular é regular.
E como resultado mais importante tem-se:
29
Teorema 2. Uma curva possui uma reparametrização por comprimento de arco se, e somente
se, é regular.
Entretanto, conforme em Picado (2006), em muitas situações parametrizar uma curva regular por comprimento de arco pode ser muito complicado ou mesmo impossível. Em primeiro
lugar, pode não ser possível exprimir a integral da Definição 16 em termos de funções familiares
(logaritmos, exponenciais, trigonométricas, etc). Em segundo lugar, mesmo que se consiga determinar s(t), poderá não ser possível encontrar a função inversa s−1 : s(I) → I, o que impede
de se escrever t como uma função de s. Além disso, outro fato importante sobre curvas é que,
dada uma curva qualquer, pode-se ter parametrizações regulares e não regulares. Por exemplo,
a parametrização γ(t) = (t,t 2 ) da parábola y = x2 é regular, mas a parametrização α(t) = (t 3 ,t 6 )
já não é regular pois α 0 (0) = (0, 0).
Contudo, a partir de agora, dentre os mais variados tipos de curvas, define-se quais realmente são o objetos de nosso estudo: as curvas regulares parametrizadas por comprimento de
arco.
4
O TRIEDRO DE FRENET E O TEOREMA FUNDAMENTAL DA
TEORIA LOCAL DE CURVAS
Um referencial é escolhido como "referência" a partir do qual as posições de outros pontos serão determinadas ou medidas. Normalmente, um referencial é dado por um sistema de
coordenadas que tanto pode ser unidimensional, bidimensional ou tridimensional. No entanto,
existem dois tipos de referenciais: os referenciais inerciais e os referenciais não-inerciais. Os
referenciais inerciais ou fixos, por exemplo, são muito utilizados em Física e para os quais são
válidos todas as leis da Mecânica. Contudo, em muitos problemas nem sempre estes referenciais são adequados. Basta considerar o estudo dos movimentos quando se adota como referencial
um sistema de eixos solidário com o movimento da Terra. O referencial em questão não é inercial, pois está sujeito a vários tipos de rotações de acordo com o movimento da Terra. Um
referencial deste tipo é também chamado de referencial móvel.
Em geometria diferencial é possível caracterizar uma curva utilizando um referencial móvel.
O mais conhecido deles é o triedro de Frenet, uma base ortonormal que é obtida em cada ponto
de uma curva regular. Além disso, sua importância reside no fato de que a partir dele é possível
determinar duas outras medidas importantes: a curvatura e a torsão, duas funções escalares, ou
seja, funções de uma única variável real, e que são capazes de determinar por completo a forma
de uma curva.
4.1
CURVATURA
Curvatura dá ideia de curvar, ou seja, de mudar de direção. Está-se agora preocupado em
determinar rigorosamente o que seja esta curvatura e de que forma pode ser medida. Em Silva
(2007) encontra-se uma interpretação geométrica bastante interessante para se entender, em
termos matemáticos, a ideia de curvatura e o modo como é definida.
Seja, então, α : I → R3 definida por α(s) = (x(s), y(s), z(s)) uma curva regular parametrizada
por comprimento de arco e considere a Figura 4.1:
31
Figura 4.1: Vetores tangentes em α(s1 ), α(s2 ) e variação do ângulo θ .
Os vetores tangentes nos pontos α(s1 ) e α(s2 ) são respectivamente α 0 (s1 ) e α 0 (s2 ). Dado
θi o ângulo que o vetor α 0 (si ) faz com a linha horizontal, determina-se ∆θ = θ2 − θ1 . Além
disso, pode-se escrever
α”(s) =
d 0
α 0 (s) − α 0 (s0 )
∆α 0
α (s) = lim
.
= lim
s→s0
s→s0 ∆s
ds
s − s0
E assim, por meio de manipulações algébricas, pode-se chegar em
|α 0 (s) − α 0 (s0 )|
|∆α 0 |
= lim
.
s→s0
s→s0 ∆s
|s − s0 |
|α”(s)| = lim
(4.1)
Figura 4.2: Variação do ângulo θ .
Sabe-se que sendo α uma curva parametrizada por comprimento de arco, seus vetores tangentes são unitários. Logo, ao se considerar a Figura 4.2, tem-se por construção a seguinte
32
relação:
Ah < AT < A1
(4.2)
no qual Ah é a área do setor circular do círculo de raio h delimitado pela circunferência pontilhada, AT é área do triângulo AOB e A1 é a área do setor circular do círculo de raio unitário.
Como a área do setor circular de raio r e ângulo θ é
Ah =
rθ
2 ,
segue que
|∆α 0 | h
h |∆θ |
1 |∆θ |
, A1 =
e AT =
.
2
2
2
(4.3)
Substituindo as equações em 4.3 na desigualdade em 4.2, obtém-se
h |∆θ | |∆α 0 | h 1 |∆θ |
<
<
2
2
2
o que é equivalente a
|∆θ |
|∆θ | < ∆α 0 <
.
h
(4.4)
Tomando-se o limite de cada equação em 4.4, com s → s0 , vem
|∆θ |
|∆α 0 |
|∆θ |
< lim
< lim
.
s−s0 |s − s0 |
s−s0 |s − s0 |
s−s0 h |s − s0 |
lim
Mas
(4.5)
|∆θ |
|∆θ |
|∆θ |
1
· lim = lim
,
= lim
s−s0 |s − s0 | s−s0 h
s−s0 |s − s0 |
s−s0 h |s − s0 |
lim
pois, em particular, da Figura 4.2, quando s1 → s2 tem-se α 0 (s1 ) → α 0 (s2 ) e, em consequência, h → |α 0 (s2 )| = 1. Deste modo, concluí-se que lims→s0 1h = 1. Então, pelo Teorema do
Confronto, resulta que
|∆θ |
|∆α 0 |
= lim
s−s0 |s − s0 |
s−s0 |s − s0 |
lim
donde, pela equação 4.1, vem
dθ |∆θ |
|α”(s)| = lim
= .
s−s0 |s − s0 |
ds
O valor de |α”(s)| representa, então, a variação do ângulo que o vetor tangente faz com a
horizontal. A este valor será dado o nome de curvatura. Portanto, percebe-se que a curvatura
mede a velocidade com que as retas tangentes mudam de direção em uma curva. Formalmente
tem-se a definição:
Definição 21. Se α : I ⊂ R → R3 é uma curva regular parametrizada por comprimento de arco,
33
então a curvatura de α em s ∈ I, é o número real
k(s) = |α”(s)| .
Note que k(s) sempre será maior ou igual a zero, pois toma-se a curvatura como uma medida
escalar: o módulo do vetor derivada segunda de α(s). Entretanto, o módulo é uma propriedade
cinemática, ou seja, uma propriedade que varia conforme a parametrização utilizada. Logo,
em outras parametrizações de uma mesma curva, poderia se ter valores diferentes de curvatura
em um mesmo ponto. Por isso, a definição acima está restrita às curvas parametrizadas por
comprimento de arco. Além do mais segue que:
Proposição 4. Sejam α : I → R3 e β : I → R3 duas reparametrizações por comprimento de
arco de uma curva γ. Então,
kα (s) = |α”(s)| = |β ”(s)| = kβ (s).
Geometricamente, vê-se que a reta tangente em uma curva muda de direção muito devagar
quando esta se parece com uma reta e muda de direção mais rapidamente quando a curva dobra
ou retorce de modo acentuado. Como a curvatura representa a variação do ângulo θ entre as
retas tangentes, então grandes variações de θ implica em
dθ
ds
relativamente grande. Olhando
para o traço de uma curva α, isso significa que onde a curva é mais fechada a curvatura é
grande e onde a curva é mais aberta a curvatura é pequena.
Figura 4.3: Curvatura.
A partir destes resultados, percebe-se, mesmo intuitivamente, que a curvatura de uma linha
reta deverá ser sempre zero e a curvatura de uma circunferência deverá ser constante, tanto
maior quanto menor for seu raio.
Exemplo 17. A reta α : I → R3 que passa por um dado ponto u ∈ R3 e tem a direção do vetor
v ∈ R3 , com |v| = 1, tem uma parametrização por comprimento de arco dada por α(s) = vs + u.
34
Segue que α”(s) = 0 ∀s ∈ I, e, portanto, |α”(s)| = 0 para qualquer s. Geometricamente, isso
significa que ∆θ é sempre nulo para quaisquer dois pontos α(s1 ), α(s2 ) no traço de α, ou seja,
dθ
ds
= 0. Assim, uma reta tem curvatura nula. A recíproca também é verdadeira, ou seja, um
segmento de uma curva tem curvatura nula se, e somente se, está contido numa reta.
Determinado o significado geométrico da curvatura ser nula, objetiva-se agora estudar os
pontos da curva onde a curvatura não se anula, ou seja, restringe-se aos casos em que k > 0.
Exemplo 18. Seja α : I → R3 uma circunferência de raio unitário no plano xy. Uma parametrização por comprimento de arco desta curva é dada por α(s) = (cos s, sin s, 0). Então, α 0 (s) =
(− sin s, cos s, 0) e α”(s) = (− cos s, − sin s, 0). Disso resulta que
q
|α”(s)| = (− cos s)2 + (− sin s)2 + 02 = 1,
donde vem que uma circunferência de raio unitário tem curvatura constante e igual a 1.
Exemplo 19. De maneira geral, considerando uma circunferência qualquer, de raio r no plano
xy, uma parametrização por comprimento de arco é
s
s
α(s) = r cos
, r sin
, 0 , s ∈ R.
r
r
Logo,
0
α (s) =
e
α”(s) =
s
s
, cos
,0
− sin
r
r
1
s
1
s
− cos
, − sin
,0 .
r
r
r
r
Então,
s
|α”(s)| =
r
2 2
s
1
s
1
1
1
− cos
+ − sin
+ 02 =
=
.
r
r
r
r
r2
r
Portanto, a curvatura k(s) de uma circunferência de raio r é constante e dada por
k(s) =
1
∀s ∈ R.
r
Exemplo 20. Seja a hélice circular de eixo vertical definida por
γ(t) = (r cost, r sint, at), (−∞ < t < ∞)
no qual r e a são constantes reais.
Esta curva, conforme visto anteriormente, tem o seu traço contido no cilindro circular
35
x2 + y2 = r2 . O número real positivo |r| é o raio da hélice. As terceiras coordenadas diferem
por um múltiplo de 2πa. Assim o número positivo 2π |a| é o passo da hélice. Ao reparametrizar
γ por comprimento de arco obtém-se
s
s
as
γ(s) = r cos √
.
, r sin √
,√
r2 + a2
r2 + a2 r2 + a2
Inicialmente, o vetor tangente em cada ponto será dado por
s
1
s
0
− r sin √
γ (s) = √
, r cos √
,a .
r2 + a2
r 2 + a2
r 2 + a2
Como
s
−r
s
γ”(s) = 2
, sin √
,0 ,
cos √
r + a2
r2 + a2
r 2 + a2
tem-se que a curvaura será
|r|
k(s) = |α”(s)| = 2
.
r + a2
Deste modo, vê-se que a curvatura da hélice circular é constante e diminui com o crescimento
em valor absoluto de r ou de a.
Nos casos especiais em que a = 0 (com r 6= 0), a hélice circular será uma circunferência no
plano horizontal xy e de raio r, logo pelo Exemplo 19 sua curvatura será 1r . Por outro lado, no
caso em que r = 0 (com a 6= 0), o traço da hélice seria apenas uma linha reta, o próprio eixo z,
logo sua curvatura seria nula, conforme Exemplo 17. E ao se considerar, respectivamente, os
casos a < 0, r > 0 e a > 0, r > 0 têm-se os seguintes traços para a hélice circular.
Figura 4.4: Hélices circulares.
36
Estes exemplos da hélice circular mostram que a curvatura não é suficiente para identificar
completamente a forma da curva. De fato, basta observar, por exemplo, que tomando respectivamente a < 0 e a > 0 o traço da hélice circular altera-se por uma rotação de π radianos em
torno do eixo z e, entretanto, a curvatura não altera-se. Mais interessante ainda é que a circunferência de raio 2 no plano xy e a hélice circular de parâmetros r = a = 1 possuem curvatura
constante e iguais a 21 , apesar de serem curvas completamente diferentes em seu traço. Tais
resultados indicam, portanto, que se faz necessário introduzir um outro tipo de curvatura que
seja capaz de diferenciar cada caso.
4.2
TRIEDRO DE FRENET E TORÇÃO
Seja α : I → R3 uma curva parametrizada por comprimento de arco, então, sabe-se que
α 0 (s) é um vetor unitário. Denota-se, portanto, o vetor tangente α 0 (s) como sendo t(s). Segue
também que
ht(s),t(s)i = |t(s)| |t(s)| cos 0 = 1,
e, derivando, tem-se ht 0 (s),t(s)i = 0, ou seja, t 0 (s)⊥t(s).
Definição 22. Seja α : I → R3 uma curva regular parametrizada por comprimento de arco e
seja t(s) = α 0 (s) o seu vetor tangente no ponto α(s). Se a curvatura k(s) for não nula, pode-se
definir o vetor normal de α no ponto α(s) como sendo o vetor
α”(s)
t 0 (s)
=
.
n(s) =
|α”(s)| k(s)
O vetor n(s) é uma combinação linear de t 0 (s), logo resulta que n(s), além de ser um vetor
unitário, também é ortogonal a t(s). Assim, o vetor normal pode ser entendido como indicador
da direção na qual a curva está se virando em cada ponto. O plano gerado por t(s) e n(s) é
chamado de plano osculador
Definição 23. Seja α : I → R3 uma curva regular parametrizada por comprimento de arco tal
que k(s) > 0. O vetor binormal a α em s é dado por
b(s) = t(s) × n(s).
no qual t(s) × n(s) é o produto vetorial dos vetores t(s) e n(s) em R3 .
Da Definição 23 segue que b(s) é um vetor unitário ∀s, pois
|b(s)| = |t(s) × n(s)| = |t(s)| |n(s)| |sin(t(s), n(s))|
37
no qual (t(s), n(s)) é o ângulo entre os vetores t(s) e n(s). Como tal ângulo é
π
2
segue que
|b(s)| = 1. Também tem-se b0 (s) ortogonal a b(s), pois
|b(s)| = 1 ⇒ hb(s), b(s)i = 1 ⇒ b0 (s), b(s) = 0 ⇒ b0 (s)⊥b(s).
Além do mais, derivando b(s) = t(s) × n(s), resulta que
b0 (s) = t 0 (s) × n(s) + t(s) × n0 (s).
Mas da Definição 22 vem t 0 (s) = k(s)n(s) o que implica t 0 (s) × n(s) = k(s)n(s) × n(s) = 0.
Portanto,
b0 (s) = t(s) × n0 (s),
ou seja, a equação mostra que b0 (s) também é ortogonal a t(s). Então, b0 (s) é paralelo a n(s),
pois b0 (s)⊥b(s) e b0 (s)⊥t(s). Assim existe τ = τ(s) tal que b0 (s) = τ(s)n(s).
Definição 24. O número real τ(s) é denominado torção da curva em s e é definido como
b0 (s) = τ(s)n(s).
Ainda pode-se escrever τ = hb0 (s), n(s)i. Note que a torção somente estará definida quando
a curvatura for não nula e, diferentemente da curvatura, a torção pode assumir valores negativos.
Além disso, sendo n(s) um vetor unitário, segue que |b0 (s)| = |τ(s)|. Logo, como b(s) = t(s) ×
n(s), o módulo da torção mede a velocidade com que varia o plano osculador da curva. Em
outras palavras percebe-se que, enquanto a curvatura mede o quanto é que a curva se afasta de
estar contida em uma reta, a torção mede quanto é que a curva se afasta de estar contida num
plano.
Tem-se, então, uma nova medida de curvatura para uma curva. Uma das primeiras observações que se pode fazer em relação a esta nova medida é que se ela for nula a curva estará
contida num plano.
Teorema 3. Seja α : I → R3 uma curva regular de curvatura não nula. Então α é planar se, e
somente se, τ = 0.
Demonstração. Seja τ(s) = 0 ∀s, logo b0 (s) = τ(s)n(s) = 0 ⇒ b(s) é constante ⇒
d
ds hα(s) − α(s0 ), b(s)i
= ht(s), b(s)i = 0 ⇒ hα(s) − α(s0 ), b(s)i é constante. Para s = s0 tem-
se que hα(s) − α(s0 ), b(s)i = 0, logo hα(s) − α(s0 ), b(s)i = 0 ∀s, ou seja, α(s) é planar. Reciprocamente, seja v um vetor ortogonal ao plano que contem α(s). Logo hα(s) − α(s0 ), vi = 0.
Derivando tem-se que hα 0 (s), vi = 0 e mais hα”(s), vi = 0 portanto ht(s), vi = 0 e k(s) hn(s), vi =
38
0. Assim, v é paralelo a b(s), pois como k(s) 6= 0, v⊥n(s) e v⊥t(s) ∀s. Desse modo hb(s), n(s)i =
0, logo τ(s) = hb0 (s), n(s)i = 0 ∀s.
Geometricamente pode-se observar que se a torção é positiva, a curva volta-se para o lado
o qual aponta o vetor binormal nestes pontos. Caso contrário, se for negativa, a curva voltase para o lado oposto. Mas para que uma dessas duas situações aconteça, num dado ponto, é
ncessário que o vetor binormal neste ponto esteja bem definido.
Exemplo 21. Sabe-se que as retas têm curvatura zero e as circunferências têm curvatura constante. Sabe-se também que uma reta e uma circunferência são ambas curvas planas. Entretanto, uma circunferência apenas pode estar contida em um único plano, enquanto que uma
reta está contida numa infinidade deles (Figura 4.5). Logo, conforme teorema acima, segue
que uma circunferência tem torção nula. Apesar de uma reta também ser plana, ela não tem
torção definida devido sua propriedade de estar contida numa infinida de planos. Em geral,
sempre que a torção num ponto é diferente de zero a curva "vai para fora do plano", do plano
osculador.
Figura 4.5: Circunferência e reta.
Da Definição 23 vem que b(s) é um vetor unitário e perpendicular a t(s) e n(s), portanto,
pode-se considerar {t(s), n(s), b(s)} como uma base ortonormada de R3 , ou seja, tem-se um
conjunto de vetores unitários, dois a dois ortogonais (linearmente independentes) e que geram
o espaço vetorial R3 .
Definição 25. Seja α : I → R3 uma curva regular parametrizada por comprimento de arco
com k(s) 6= 0, ∀s ∈ I. O referencial móvel ortonormal {t(s), n(s), b(s)} é chamado o Triedro
de Frenet ao longo da curva α(s), no qual t(s), n(s) e b(s) são os vetores tangente, normal e
binormal, respectivamente.
A seguir mostra-se o triedro de Frenet em um ponto de uma curva regular α:
39
Figura 4.6: Triedro de Frenet.
A partir do triedro de Frenet, passa-se à estudar as propriedades de uma curva utilizando um
referencial adaptado à própria curva, ao invés de usar um referencial fixo. Assim, por meio
dele associa-se campos de vetores aos pontos da curva e estuda-se a variação destes campos ao
longo da curva.
Cada par de vetores do triedro determinar um plano. Além do plano osculador gerador por
t(s) e n(s), em cada ponto α(s) tem-se mais dois planos especiais: o plano normal gerado por
n(s) e b(s) e o plano retificante gerado por t(s) e b(s).
Figura 4.7: Planos gerados pelo Triedro de Frenet.
Exemplo 22. Obter o triedro de Frenet e a torção da hélice circular parametrizada pelo comprimento de arco
s
s
as
γ(s) = r cos √
, r sin √
,√
, s ∈ R.
r2 + a2
r 2 + a2 r 2 + a2
40
A curvaura é
k(s) = |γ”(s)| =
|r|
r2 + a2
.
Logo, o vetor normal será dado por
γ”(s)
n(s) =
=
k(s)
s
s
, − sin √
− cos √
r 2 + a2
r 2 + a2
,0
e o vetor binormal por
s
s
a sin √
, −a cos √
,r .
b(s) = t(s) × n(s) = √
r 2 + a2
r2 + a2
r 2 + a2
1
Assim,
s
s
cos √
b (s) = √
, sin √
,0 .
r 2 + a2
r2 + a2
r 2 + a2
Por último tem-se que a torção será
0
a
a
τ(s) = b0 (s), n(s) = − √
.
2
r + a2
Figura 4.8: Vetores t, n e b em dois pontos da hélice circular.
41
4.3
AS FÓRMULAS DE FRENET
As fórmulas ou equações de Frenet são obtidas pela derivação das funções vetoriais t(s),
n(s) e b(s). Mais especificamente, sabe-se que se α : I → R3 é uma curva regular parametrizada
por comprimento de arco e tal que k(s) > 0, ∀s ∈ I, então o triedro de Frenet da curva α em s
é um referencial ortonormal de R3 . Portanto, pode-se obter os vetores t 0 (s), n0 (s) e b0 (s) como
combinação linear de t(s), n(s) e b(s). Isto significa que as variações dos campos t, n e b são
expressas em funções do próprio referencial. De fato, inicialmente tem-se que:
t 0 (s) = k(s)n(s),
b0 (s) = τ(s)n(s).
(4.6)
Considerando que n(s) = b(s) × t(s), ao derivar tem-se
n0 (s) = b0 (s) × t(s) + b(s) × t 0 (s).
(4.7)
Substituindo b0 (s) e t 0 (s) pelas expressões em 4.6 obtêm-se
n0 (s) = −τ(s)b(s) − k(s)t(s).
(4.8)
Dessa forma o triedro de Frenet definido por {t(s), n(s), b(s)}, para uma curva regular α :
I → R3 parametrizada por comprimento de arco e com k(s) > 0, ∀s ∈ I, satisfaz as equações
t 0 (s) = k(s)n(s),
n0 (s) = −τ(s)b(s) − k(s)t(s),
(4.9)
b0 (s) = τ(s)n(s).
As equações acima foram obtidas por Serret (1819-1885) em 1851 e por Frenet (18161900) em 1847. Frenet as desenvolveu em sua dissertação, mas somente as publicou em 1852.
A importância destas equações reside no fato de que por meio delas é possível obter entidades
geométricas, a curvatura k e a torção τ, que informam sobre o comportamento de uma curva em
uma vizinhança de um ponto.
42
4.4
ISOMETRIA EM R3 E O TEOREMA FUNDAMENTAL DA TEORIA
LOCAL DE CURVAS
A partir das equações de Frenet é possível estudar o Teorema Fundamental da Teoria Local
de Curvas. Entretanto, faz-se necessário inicialmente considerar a noção de isometria. Ressaltase que as demonstrações de alguns resultados serão omitidas, mas podem ser encontradas em
Tenenblat (1990) e Carmo (2008).
Definição 26. Uma aplicação F : R3 → R3 é uma isometria de R3 se preserva distâncias, ou
seja, ∀p, q ∈ R3 tem-se
|F(p) − F(q)| = |p − q| .
Exemplo 23. A transformção linear T : R3 → R3 tal que T (v) = v, ou seja, a transformação
identidade, é uma isometria.
Exemplo 24. A aplicação T : R3 → R3 no qual T (v) = u + v, para cada v ∈ R3 e u é um vetor
fixo em R3 , é uma isometria denominada translação por u.
Exemplo 25. A aplicação F que para cada (x, y, z) ∈ R3 associa
F(x, y, z) = (x cos θ − y sin θ , x sin θ + y cos θ , z),
no qual 0 < θ < 2π é fixo, é uma isometria de R3 , denominada rotação no eixo OZ.
Definição 27. Uma transformação ortogonal de R3 é uma transformação linear C : R3 → R3
que preserva produto interno, ou seja, ∀p, q ∈ R3 tem-se
hC(p),C(q)i = hp, qi .
Os Exemplos 23, 24 e 25 são também exemplos de transformações ortogonais. Além do
mais segue que:
Proposição 5. Toda transformação ortogonal é uma isometria.
Teorema 4. Se F : R3 → R3 é uma isometria, então existe uma única translação T e uma única
transformação ortogonal C tal que F = T ◦C.
Deste modo, vê-se que toda isometria de R3 pode ser obtida de uma única forma, como
composta de uma translação e uma transformação ortogonal.
Exemplo 26. A aplicação F(x, y, z) = (2 − x, 3 + y, z), com (x, y, z) ∈ R3 , é uma isometria e F =
T ◦C no qual T é a translação por (2, 3, 0) e C é a transformção ortogonal C(x, y, z) = (−x, y, z).
43
Proposição 6. Seja F = T ◦C uma isometria de R3 , então F é diferenciável e ∀p ∈ R3 e v ∈ R3 ,
dFp (v) = C(v).
A proposição acima implica que dFp (v) é uma transformação ortogonal, logo:
Corolário 1. Se F é uma isometria de R3 , então ∀p ∈ R3 , dFp preserva produto interno, isto é,
dFp (v), dFp (w) = hv, wi ,
∀v, w ∈ R3
Portanto, se F : R3 → R3 é uma isometria, então a diferencial de F em p ∈ R3 leva uma
base ortonormal v1 , v2 , v3 de R3 em outra base ortonormal dFp (v1 ), dFp (v2 ), dFp (v3 ). Além do
mais:
Proposição 7. Sejam p, q pontos de R3 , v1 , v2 , v3 e w1 , w2 , w3 referenciais ortonormais de R3 .
Então existe uma única isometria F de R3 tal que F(p) = q e dFp (vi ) = wi , com i = 1, 2, 3.
Dadas uma curva regular α e uma isometria F de R3 , então F ◦ α é uma curva regular que
difere de α apenas pela sua posição no espaço.
Definição 28. Duas curvas regulares α, β : I → R3 são conguentes se existe isometria F de R3
tal que β = F ◦ α.
O próximo resultado relaciona o triedro de Frenet, a curvatura e a torção em pontos correspondentes de duas curvas congruentes.
Proposição 8. Seja α : I → R3 uma curva parametrizada por comprimento de arco tal que a
curvatura k(s) > 0, ∀s ∈ I. Seja F uma isometria de R3 e β = F ◦ α. Então β é uma curva
regular parametrizada por comprimento de arco e ∀s ∈ I tem-se
kβ = kα ;
τβ = ±τα ;
tβ (s) = dFα(s) (tα (s));
nβ (s) = dFα(s) (nα (s));
bβ (s) = ±dFα(s) (bα (s)).
no qual kβ , τβ , etc, são a curvatura e a torção, etc, de β e os sinais ± indicam que F pode
preservar a orientação de β (+) ou inverter (−).
Pela proposição anterior, verifica-se que duas curvas congruentes têm a mesma curvatura
e a torção (a menos de sinal). O Teorema Fundamental das Teoria Local de Curvas mostra
44
que esta propriedade caracteriza as curvas congruentes. Além disso, o teorema prova que dadas
duas funções escalares diferenciáveis k(s) > 0 e τ(s), existe uma curva regular de R3 que admite
estas funções como curvatura e torção, respectivamente.
Teorema 5. (Teorema Fundamental da Teoria Local de Curvas)
i) Dadas duas funções diferenciavéis k(s) > 0 e τ(s), s ∈ I ⊂ R, existe uma curva regular
α(s), parametrizada por comprimento de arco, tal que k(s) é a curvatura e τ(s) é a
torção de α em s.
ii) A curva α(s) é única se fixar α(s0 ) = p0 ∈ R3 , α 0 (s0 ) = v1 , α”(s0 ) = k(s0 )v2 , no qual v1
e v2 são vetores ortonormais de R3 .
iii) Se duas curvas α(s) e γ(s) têm a mesma curvatura e torção (a menos de sinal) então α e
γ são congruentes.
Demonstração. Inicialmente será provado iii). Para mostrar que α e γ são congruentes deve-se
mostrar que existe uma isometria F tal que γ = F ◦ α. A idéia, então, é considerar a curva
β = F ◦ α que é congruente a α, em seguida provar que β = γ. Seja s0 ∈ I e, por hipótese,
kα = kγ e τα = τγ (ou respectivamente, τα = −τγ ). Os índices α, β e γ denotam à curva a qual
se refere a curvatura, a torção e assim por diante. Define-se F como a isometria de R3 tal que
F(α(s0 )) = γ(s0 ),
dFα(s0 ) (tα (s0 )) = tγ (s0 ),
(4.10)
dFα(s0 ) (nα (s0 )) = nγ (s0 ),
dFα(s0 ) (bα (s0 )) = bγ (s0 ) (respec. dFα(s0 ) (bα (s)) = −bγ (s0 )).
Note que F assim definida associa um ponto de α com um ponto de γ. Além disso também leva
o triedro de Frenet (referencial ortonormal) do ponto α(s0 ) ao triedro de Frenet do ponto γ(s0 ).
Logo, sua existência é garantida pela Proposição 7. Seja β = F ◦ α, então segue da Proposição
8 que
kα = kβ ,
τα = τβ (respec. τβ = −τα ),
F(α(s0 )) = β (s0 ),
dFα(s0 ) (tα (s0 )) = tβ (s0 ),
dFα(s0 ) (nα (s0 )) = nβ (s0 ),
dFα(s0 ) (bα (s0 )) = bβ (s0 ) (respec. dFα(s0 ) (bα (s0 )) = −bβ (s0 )).
(4.11)
45
Então da escolha de F segue que
β (s0 ) = γ(s0 ),
kβ = kα = kγ ,
τβ = τα = τγ (respec. τβ = −τα = τγ ),
(4.12)
tβ (s0 ) = tγ (s0 ),
nβ (s0 ) = nγ (s0 ),
bβ (s0 ) = bγ (s0 ).
Para provar que β = γ, basta mostrar que tβ = tγ , pois neste caso se terá β (s) − γ(s) constante
e como β (s0 ) = γ(s0 ) pode-se concluir que β (s) = γ(s) ∀s ∈ I. Para tanto pode-se definir a
função f : I → R, que a cada s ∈ I associa
2 2 2
f (s) = tβ (s) − tγ (s) + nβ (s) − nγ (s) + bβ (s) − bγ (s) .
Verifica-se facilmente que f 0 (s) = 0 ∀s ∈ I, portanto f (s) é constante. Como f (s0 ) = 0, pois
tβ (s0 ) = tγ (s0 ), nβ (s0 ) = nγ (s0 ) e bβ (s0 ) = bγ (s0 ), concluí-se que f (s) ≡ 0. E sendo f (s)
definida como uma soma de termos estritamente positivos, segue obrigatoriamente que tβ = tγ .
i) Para provar a existência de α, basta mostrar que existe um referencial ortonormal t(s), n(s) e
b(s) que satisfaz as fórmulas de Frenet e em seguida definir α(s) =
Rs
s0 t(s)ds.
Denota-se t(s) = (t1 (s),t2 (s),t3 (s)), n(s) = (n1 (s), n2 (s), n3 (s)), b(s) = (b1 (s), b2 (s), b3 (s)).
Objetiva-se provar a existência de funções ti (s), ni (s), bi (s), 1 ≤ i ≤ 3 que satisfazem o sistema
de nove equações diferenciais.
ti0 (s) = k(s)ni (s),
n0i (s) = −τ(s)bi (s) − k(s)ti (s) 1 ≤ i ≤ 3,
(4.13)
b0i (s) = τ(s)ni (s).
Segue-se do teorema da existência e unicidade de soluções de equações diferenciais lineares que
fixados os valores de ti (s0 ), ni (s0 ), bi (s0 ), 1 ≤ i ≤ 3, para um s0 ∈ I, existe um única solução
do sistema acima. Ou seja, esta solução é única quando se fixa um ponto s0 , o vetor tangente,
normal e binormal em s0 . Em particular, existe uma única solução ti (s), ni (s), bi (s), 1 ≤ i ≤ 3,
46
do sistema 4.13 quando fixa-se
t(s0 ) =
(t1 (s0 ),t2 (s0 ),t3 (s0 ))
= (1, 0, 0),
n(s0 ) = (n1 (s0 ), n2 (s0 ), n3 (s0 )) = (0, 1, 0),
(4.14)
b(s0 ) = (b1 (s0 ), b2 (s0 ), b3 (s0 )) = (0, 0, 1).
Prova-se agora que esta solução t(s), n(s), b(s) é um referencial ortonormal. Para isto, considerase o seguinte sistema de equações para as funções ht(s),t(s)i, hn(s), n(s)i, hb(s), b(s)i, ht(s), n(s)i,
ht(s), b(s)i, hb(s), n(s)i:
ht,ti0 = 2k ht, ni ,
hn, ni0 = −2τ hb, ni − 2k ht, ni ,
hb, bi0 = 2τ hb, ni ,
ht, ni0 = k hn, ni − k ht,ti − τ ht, bi ,
(4.15)
ht, bi0 = k hb, ni + τ ht, ni ,
hb, ni0 = τ hn, ni − k ht, bi − τ hb, bi .
com a condição inicial ht(s0 ),t(s0 )i = hn(s0 ), n(s0 )i = hb(s0 ), b(s0 )i = 1, ht(s0 ), n(s0 )i
= ht(s0 ), b(s0 )i = hb(s0 ), n(s0 )i = 0. A solução para este problema de valor inicial é única
e dada pelas funções
ht(s),t(s)i = hn(s), n(s)i = hb(s), b(s)i ≡ 1,
ht(s), n(s)i = ht(s), b(s)i = hb(s), n(s)i ≡ 0.
(4.16)
De fato, basta substituir estas funções no sistema acima para verificar que formam uma solução
do sistema. Portanto, a solução de 4.13 com a condição inicial 4.14 forma um referencial
ortonormal para todo s. Além disso, b(s) = t(s) × n(s), já que esta condição é satisfeita para
s = s0 definido em 4.14.
Basta então definir a curva
Z s
α(s) =
t(s)ds.
s0
Como t(s) é um vetor unitário obtém-se que α está parametrizada por comprimento de arco s.
Além disso, α 0 (s) = t(s) e α”(s) = t 0 (s). Segue de 4.13 que α”(s) = k(s)n(s). Como n(s) é
unitário e k(s) > 0, tem-se que n é o vetor unitário na direção de α”, ou seja, n é o vetor normal
a α e, portanto, k(s) é a curvatura de α. Segue do fato de b(s) = t(s) × n(s), que b é o vetor
binormal a α, donde concluí-se de 4.13 que τ é a torção de α.
ii) Provar que α é única, quando fixa-se α(s0 ) = p0 , α 0 (s0 ) = v1 , α”(s0 ) = k(s0 )v2 , no qual
47
v1 e v2 são vetores ortonormais de R3 , corresponde a provar inicialmente que existe um única
solução do sistema 4.13 quando fixa-se t(s0 ) = v1 , n(s0 ) = v2 e b(s0 ) = v1 × v2 . Este fato
decorre do teorema da existência e unicidade de soluções de sistemas de equações diferenciais
lineares. Obtida esta solução t(s), n(s), b(s), prova-se que é um referencial ortonormal usando
o sistema 4.15. Como a curva α deve satisfazer α 0 (s) = t(s), segue que
Z s
α(s) = p0 +
t(s)ds.
s0
Seguem algumas observações decorrentes do teorema acima:
1. Em síntese, este teorema, baseado nos resultados apresentados sobre as fórmulas de
Frenet, mostra que uma curva parametrizada por comprimento de arco fica completamente determinada a partir do momento que são conhecidas a sua curvatura e torção em
cada ponto.
2. Se duas curvas possuem valores iguais de curvatura e torção, então elas são conguentes.
Logo existe uma isometria F que leva uma curva na outra. Isto significa que é possível transformar qualquer uma das curvas na outra sem recorrer a deformações, ou seja,
utilizando uma isometria composta apenas por translações e transformações ortogonais.
Portanto, diz-se que a curvatura e a torção determinam completamente a forma de uma
curva a menos de sua posição no espaço.
3. Uma curva será unicamente determina quando se define um ponto, a tangente e a normal
neste ponto. Em particular, afirma-se que, além da função curvatura e da função torção,
basta se ter o ponto inicial da curva e o triedro de Frenet inicial da curva. Este fato será
melhor discutido no próximo capítulo.
5
APLICAÇÕES DO TRIEDRO DE FRENET
Conforme visto no capítulo anterior, o triedro de Frenet é parte importante na prova do teorema fundamental. Neste capítulo será apresentada outra aplicação do triedro, em especial das
fórmulas de Frenet: a caracterização das hélices. Posteriormente, também faz-se um estudo,
com auxílio do software Mathematica, de uma hélice circular parametrizada por comprimento
de arco, no qual busca-se determiná-la em termos de curvatura e torção.
5.1
CARACTERIZAÇÃO DAS HÉLICES
Existem casos particulares de classes de curvas que têm a mesma propriedade.
Exemplo 27. A hélice circular parametrizada pelo comprimento de arco do Exemplo 22 tem
a propriedade de que o vetor tangente forma um ângulo constante com o eixo Oz. Em outras
palavras existe um vetor unitário, que neste caso é v = (0, 0, 1), tal que o ângulo entre t(s) e v
é constante. Com efeito, tem-se que
ht(s), vi = |t(s)| |v| cos θ (s).
Conforme no Exemplo 20, o seu vetor tangente é dado por
1
s
s
t(s) = √
− r sin √
, r cos √
,a .
r2 + a2
r 2 + a2
r 2 + a2
Além do mais |v| = 1 e |t(s)| = 1 ∀s ∈ I. Disso resulta que
cos θ (s) = ht(s), vi
1
s
s
√
− r sin √
, r cos √
, a , (0, 0, 1)
=
r2 + a2
r 2 + a2
r 2 + a2
a
= √
,
r 2 + a2
donde vem
a
θ (s) = arccos √
,
r2 + a2
49
ou seja, o ângulo θ entre t(s) e v é constante para todo s.
As curvas que satisfazem uma propriedade como esta são chamadas de hélices generalizadas ou, simplesmente, hélices. Assim, tem-se:
Definição 29. Uma curva regular α : I → R3 é uma hélice generalizada, se existe um vetor
unitário v que forma um ângulo constante com α 0 (t), ∀t ∈ I, isto é,
hα 0 (t),vi
|α 0 (t)|
é constante. O vetor
v é dito eixo da hélice.
Exemplo 28. A curva α(t) = (et cost, et sint, et ), t ∈ R3 é uma hélice, pois α 0 (t) também forma
um ângulo constante com o vetor (0, 0, 1).
Exemplo 29. Toda curva plana é uma hélice generalizada. De fato, em uma curva plana o
vetor binormal b(s) não depende de s, ou seja, é constante b(t) = b ∀t.
Proposição 9. Seja α : I → R3 uma curva regular de curvatura e torção não nulas. Então α é
uma hélice se, e somente se,
k
τ
é constante.
Demonstração. Pode-se supor que α é parametrizada por comprimento de arco. Se α é uma
hélice, então existe um vetor unitário v tal que hα 0 (s), vi é constante. Portanto, hα”(s), vi = 0 ⇒
hk(s)n(s), vi = k(s) hn(s), vi = 0. Como k(s) 6= 0, segue que hn(s), vi = 0, isso significa que v
e n(s) são ortogonais, logo v pertence ao plano determinado por t(s) e b(s), para cada s ∈ I.
Então, seja
v = cos θ (s)t(s) + sin θ (s)b(s).
Derivando tem-se
0 = − sin θ (s)θ 0 (s)t(s) + cos θ (s)t 0 (s) +
+ cos θ (s)θ 0 (s)b(s) + sin θ (s)b0 (s).
(5.1)
E utilizando as fórmulas de Frenet segue que
0 = − sin θ (s)θ 0 (s)t(s) +
+ (k(s) cos θ (s) + τ(s) sin θ (s))n(s) +
+ cos θ (s)θ 0 (s)b(s).
(5.2)
Portanto, ∀s ∈ I
sin θ (s)θ 0 (s) = 0
cos θ (s)θ 0 (s) = 0
k(s) cos θ (s) + τ(s) sin θ (s) = 0.
(5.3)
50
As duas primeiras equações determinam θ 0 (s) = 0, ∀s ∈ I.
Com efeito, segue que
(sin θ (s)θ 0 (s))2 + (cos θ (s)θ 0 (s))2 = 0 donde vem θ 0 (s)2 (sin2 θ (s) + cos2 θ (s)) = 0 ⇒ θ 0 (s) =
0. Portanto θ (s) é constante. Além disso, a constante cos θ é não nula, pois caso contrário
tem-se τ(s) sin θ = 0 com obrigatoriamente sin θ 6= 0 o que resulta em τ(s) = 0, contradizendo
a hipótese. Assim, segue da terceira igualdade que
k
sin θ
=−
,
τ
cos θ
ou seja,
k
τ
é constante. Reciprocamente, se
k
τ
é constante, fixa-se θ tal que tan θ = − τk . Então
v = cos θt(s) + sin θ b(s)
é um vetor unitário constante e tal que ∀s ∈ I ht(s), vi = cos θ é constante. Portanto α é uma
hélice.
Pela Proposição 9 vê-se que a descrição de uma determinada família de curvas com propriedades comuns, no caso as hélices, é completa com a obtenção de uma caracterização dessas
curvas em termos de curvatura e torção.
5.2
CARACTERIZAÇÃO DE UMA HÉLICE CIRCULAR EM TERMOS
DE CURVATURA E TORÇÃO POR MEIO DO SOFTWARE MATHEMATICA
Nesta seção, com auxílio do software Mathematica, é feito um estudo para se obter, em
termos de curvatura e torção, o traço da hélice circular parametrizada por comprimento de arco
de raio r = 8 e passo 8π, ou seja, com a = 4, e definida por
s
s
4s
γ(s) = 8 cos √ , 8 sin √ , √
s ∈ [0, +∞).
80
80 80
(5.4)
Assim, identifica-se num primeiro momento quais os valores adequados de curvatura e torção
com as quais se tem uma hélice circular acima e, em seguida, implementa-se tais resultados
computacionalmente.
No software Mathematica, uma visualização prévia do traço de γ é dada simplesmente
quando define-se:
ParametricPlot3D[{8Cos[t/Sqrt[80]],8Sin[t/Sqrt[80]],4t/Sqrt[80]},
{t,0,200}].
51
Figura 5.1: Hélice circular com r = 8 e a = 4.
Em Picado (2006) encontra-se um algoritmo na linguagem do software Mathematica no
qual é possível aplicar o teorema fundamental. Inicialmente é necessário definir a sintaxe abaixo
como segue:
plotintrinsic3d[{kk_,tt_}, {a_:0,{p1_:0,p2_:0,p3_:0},
{q1_:1,q2_:0,q3_:0}, {r1_:0,r2_:1,r3_:0}},
{smin_:10,smax_:10}, opts___]:=
ParametricPlot3D[Module[{x1,x2,x3,t1,t2,t3,
n1,n2,n3,b1,b2,b3},{x1[s],x2[s],x3[s]}/.
NDSolve[{x1'[ss]==t1[ss],
x2'[ss]==t2[ss],
x3'[ss]==t3[ss],
t1'[ss]==kk[ss]n1[ss],
t2'[ss]==kk[ss]n2[ss],
t3'[ss]==kk[ss]n3[ss],
n1'[ss]==-kk[ss]t1[ss]-tt[ss]b1[ss],
n2'[ss]==-kk[ss]t2[ss]-tt[ss]b2[ss],
n3'[ss]==-kk[ss]t3[ss]-tt[ss]b3[ss],
52
b1'[ss]==tt[ss]n1[ss],
b2'[ss]==tt[ss]n2[ss],
b3'[ss]==tt[ss]n3[ss],
x1[a]==p1, x2[a]==p2, x3[a]==p3,
t1[a]==q1, t2[a]==q2, t3[a]==q3,
n1[a]==r1, n2[a]==r2, n3[a]==r3,
b1[a]==q2 r3 - q3 r2,
b2[a]==q3 r1 - q1 r3,
b3[a]==q1 r2 - q2 r1},
{x1,x2,x3,t1,t2,t3,n1,n2,n3,b1,b2,b3},{ss,smin,smax}]]
//Evaluate,{s, smin,smax}, opts]
Pode-se dizer que o algoritmo acima é construído com base na demostração da parte i) do
teorema fundamental. Assim, em {kk_,tt_} defini-se kk como sendo a curvatura e tt como
sendo a torção. Logo após define-se os valores de ti , ni e bi com i = 1, 2, 3, componentes dos
vetores tangente, normal e binormal, segundo as fórmulas de Frenet. Os valores em pi , qi e ri
correspondem as condições iniciais, ou seja, representam respectivamente um ponto da curva,
a tangente e a normal neste ponto.
Após definida a sintaxe basta escrever, por exemplo,
plotintrinsic3d[{1&,0&},{0,{0,0,0},{1,0,0},{0,1,0}}, {-10,10},
PlotPoints − > 1000].
Observe que em {1&,0&} o valor 1 representa a curvatura e o valor 0 representa a torção. Como
são valores constantes, a única curva que satisfaz estas condições é uma circunferência de raio
1 (Figura 5.2). Para se obter uma reta pode-se considerar a curvatura sendo 0 e uma torção
qualquer, constante ou não, sendo 1 por exemplo (Figura 5.3).
53
Figura 5.2: Circunferência com k = 1 e τ = 0.
Figura 5.3: Reta com k = 0 e τ = 1.
Conforme Exemplos 20 e 22, a hélice circular tem curvatura constante k > 0 e torção constante τ em todos os seus pontos no qual
k=
r
r 2 + a2
e
τ =−
a
r 2 + a2
.
8
4
Ao considerar r = 8 e a = 4, da hélice definida em 5.4, tem-se k = 80
= 0.1 e τ = − 80
= −0.05.
Logo, atribuindo-se k = 0.1 e τ = −0.05, escreve-se:
plotintrinsic3d[{0.1&,-0.05&},{0,{0,0,0},{1,0,0},{0,1,0}},{0,200},
PlotPoints − > 1000]
e o gráfico gerado é:
54
Figura 5.4: Hélice circular gerada para k = 0.1 e τ = −0.05.
Note, portanto, que o traço acima é diferente do traço de γ e, contudo, ambos são traços de
hélices circulares. Em particular, percebe-se que a curvatura k = 0.1 e a torção τ = −0.05 são
capazes de determinar por completo não apenas uma única hélice circular, mas uma família de
hélices circulares. Isso sugere o que já foi evidenciado no teorema fundamental e, em particular,
para as hélices, o que foi visto na Proposição 9.
Esta observação também pode ser estendida para os exemplos da reta e da circunferência.
No caso da circunferência o que se tem não é apenas uma, mas uma infinidade de circunferências cuja curvatura é 1 e torção é 0. Basta pensar na quantidade de circunferências de raio
unitário que se pode obter no plano xy apenas alterando o seu centro.
Mas, então, surge a pergunta: como determinar a hélice circular da Figura 5.1? É certo que
a curvatura e a torção não são suficientes. Precisa-se, então, de algo a mais que diferencie uma
hélice circular da outra. De fato, quando se escreveu o algoritmo que culminou na determinação da Figura 5.4 outras medidas estavam associadas como {0,0,0}, {1,0,0}, {0,1,0} e
{0,200}. Este último refere-se a variação do parâmetro s utilizado no software, ou seja, s varia
de 0 à 200. Já os demais referem-se, respectivamente, ao ponto inicial da curva, a tangente e a
normal, ambas também no ponto inicial da curva.
Assim, da parte ii) do teorema fundamental, vê-se que uma curva é única quando se fixa um
ponto inicial s0 , a tangente e a normal neste ponto. Logo, para a hélice circular γ, sendo s0 = 0,
basta encontrar os valores γ(0), t(0) e n(0) e, assim, substituí-los no algoritmo.
55
Segue que
γ(0) = (8, 0, 0),
8
4
t(0) =
0, √ , √
,
80 80
n(0) = (−1, 0, 0).
(5.5)
Logo escreve-se
plotintrinsic3d[{0.1&,-0.05&},{0,{8,0,0},{0,8/Sqrt[80],4/Sqrt[80]},
{-1,0,0}},{0,200},PlotPoints − > 1000],
e o resultado obtido é o seguinte:
Figura 5.5: Hélice circular gerada para k = 0.1, τ = −0.05 e os valores de γ(0), t(0) e n(0).
Confirma-se, então, por meio da caracterização de uma hélice circular, que uma curva fica
definida de maneira única por quatro informações:
1. A função curvatura k(s) > 0;
2. A função torção τ(s);
56
3. Um ponto da curva;
4. O triedro de Frenet neste ponto da curva.
Em particular, para a implementação no software, tomou-se este ponto como sendo o ponto
inicial da curva.
Agora, seja α a hélice circular cujo traço é dado pela Figura 5.4. Conforme visto, se duas
curvas têm as mesmas funções curvatura k(s) > 0 e torção τ(s), então existe uma isometria que
transforma uma na outra, ou seja, deve existir F = T ◦ C, composta de uma translação e uma
transformação ortogonal, tal que γ = F ◦ α.
Para determinar F define-se a transformação linear C : R3 → R3 tal que
8
4
0, √ , √
C(1, 0, 0) =
,
80 80
C(0, 1, 0) = (−1, 0, 0),
4
8
C(0, 0, 1) =
0, − √ , √
.
80 80
Como ∀(x, y, z) ∈ R3 tem-se
(x, y, z) = x(1, 0, 0) + y(0, 1, 0) + z(0, 0, 1),
resulta que
C(x, y, z) = xC(1, 0, 0) + yC(0, 1, 0) + zC(0, 0, 1)
4
4
8
8
=
− y, √ x − √ z, √ x + √ z .
80
80
80
80
Como os referenciais são ortonormais, segue-se da definição de C que C preserva produto
interno. Portanto é uma transformação ortogonal.
Seja T a translação por (8, 0, 0) +C(0, 0, 0) = (8, 0, 0). Então a isometria F = T ◦C satisfaz
F(0, 0, 0) = T (C(0, 0, 0)) = T (0, 0, 0) = (8, 0, 0).
Conforme Proposição 6 tem-se
dF(0,0,0) (1, 0, 0) = C(1, 0, 0) =
dF(0,0,0) (0, 1, 0) = C(0, 1, 0) =
8
4
0, √80 , √80 ,
(−1, 0, 0),
4
8
dF(0,0,0) (0, 0, 1) = C(0, 0, 1) =
0, − √80 , √80 .
57
E da Proposição 7 vem que essa isometria é única. Logo, pode-se escrever F como sendo
F(x, y, z) = T (C(x, y, z))
= (8, 0, 0) +C(x, y, z)
8
4
4
8
=
8 − y, √ x − √ z, √ x + √ z .
80
80
80
80
Deste modo tem-se que o ponto inicial γ(0) da curva e o triedro de Frenet em γ(0) correspondem, respectivamente, à translação e à transformação ortogonal realizados a partir de α
para se obter γ. De fato, considerando que α é uma curva parametrizada por comprimento de
arco, ela é definida como
√
√
64 sin s/ 80 16s
s −32 sin s/ 80 32s
√
√
α(s) =
+
, 8 − 8 cos √ ,
+
.
80
80
80
80
80
no qual seu traço é o da Figura 5.4. Então, tomando F ◦ α tem-se
s
s
4s
F(α(s)) = 8 cos √ , 8 sin √ , √
= γ(s).
80
80 80
Portanto, vê-se que γ = F ◦ α, ou seja, F é a isometria que leva o traço de α no traço de γ.
6
CONCLUSÕES
Ao se desenvolver este trabalho, uma pesquisa bibliográfica em geometria diferencial restrita ao estudo local de curvas, destacam-se dois aspectos importantes. O primeiro refere-se à
aplicação dos conhecimentos matemáticos adquiridos durante a graduação. O segundo referese às conclusões obtidas a partir das perguntas diretrizes inicialmente desenvolvidas no projeto,
quais sejam, investigar qual é a importância do Triedro de Frenet e em quais circunstâncias
contribui para a teoria local de curvas.
De fato, na tentativa de construir um texto introdutório, mais didático e compreensível,
ressalta-se a importância e a contribuição do cálculo diferencial e integral, da álgebra linear
e da geometria analítica. Em particular destaca-se que, ao se restringir o estudo às curvas
parametrizadas regulares, então pelas definições do triedro de Frenet, de curvatura e torsão
pode-se deduzir as equações de Frenet. A partir delas estuda-se o Teorema Fundamental da
Teoria local de Curvas, pelo qual é possível observar que a curvatura e a torção determinam
completamente a forma de uma curva, a menos de sua posição no espaço. Logo, dadas duas
funções escalares diferenciáveis k(s) > 0, τ(s), um ponto s0 da curva e o triedro de Frenet em
s0 (na verdade, apenas t(s) e n(s)) existe exatamente uma curva que satisfaz estas condições.
Fato que ficou evidente ao se estudar o exemplo de uma hélice circular parametrizada por comprimento de arco.
De maneira geral, a partir das abordagens e estudos realizados, buscou-se muito mais do que
conhecer um pouco sobre a teoria local de curvas, mas sim ser capaz de elaborar um material
de estudo que surge no intuito de auxiliar à acadêmicos de Licenciatura em Matemática da
UNEMAT num primeiro contato com geometria diferencial. Talvez essa abordagem inicial
também possa se apresentar futuramente como um caminho interessante, estimulando em outros
acadêmicos um maior desenvolvimento de seu estudo ou servindo como propulsora para que
novos temas, aparentemente desconhecidos em nosso curso, possam começar a ser discutidos e
trabalhados.
59
REFERÊNCIAS BIBLIOGRÁFICAS
BISPO, A. P.; MARTINS, R. de A. Gauss e a origem da geometria diferencial. VI Seminário
Nacional de História da Matemática, 2005.
CARMO, M. P. do. Pesquisa em geometria diferencial no brasil. Revista Matemática
Universitária, n. 26/27, p. 01–27, Junho/Dezembro 1999.
CARMO, M. P. do. Geometria Diferencial de Curvas e Superfícies. Rio de Janeiro: Sociedade
Brasileira de Matemática, 2008.
CUNHA, M. T. Curvas no Plano e no Espaço. Universidade Federal de Minas Gerais, 2008.
Disponível em: <http://www.mat.ufmg.br/∼tcunha/CalcIII08/07Curvasv2.pdf>.
HOFFMAN, K.; KUNZE, R. Álgebra linear. Rio de Janeiro: Livros Técnicos e Científicos,
1979.
LIMA, E. L. Álgebra linear. 3. ed. Rio de Janeiro: IMPA, 2008.
PICADO, J. Apontamentos de Geometria Diferencial. Coimbra: Universidade de Coimbra,
2006. Disponível em: <http://www.mat.uc.pt/∼picado/geomdif/Apontamentos/sebenta.pdf>.
SILVA, M. N. da. Teoria Local de Curvas. Universidade Estadual do Vale do Acaraú, 2007.
Disponível em: <http://www.sobralmatematica.org/preprints/curvatura.pdf>.
STEWART, J. Cálculo. 5. ed. São Paulo: Thomson Learning, 2006.
TENENBLAT, K. Introdução à Geometria Diferencial. Brasília: Universidade de Brasília,
1990.
60
APÊNDICE A -- BREVE APRESENTAÇÃO DO SOFTWARE
MATHEMATICA
Em particular, esta seção foi desenvolvida para mostrar alguns conceitos básicos do software Mathematica, principalmente para entender alguns dos recursos que foram utilizados no
capítulo 4.
Inicialmente destaca-se o fato de que é um software extremamente abrangente e completo,
capaz de efetuar cálculos numéricos, operar expressões algébricas, gerar uma grande variedade
de diferentes tipos de gráficos e produzir documentos com alta qualidade para impressão. Aliado a isso destaca-se sua poderosa linguagem de programação que permite estender seu uso
para aplicações que atendam a necessidades específicas como, por exemplo, cálculo estrutural,
séries temporais, redes neurais, etc.
O Mathematica é um software comercial que deve ser adquirido no site da produtora
(http://store.wolfram.com) ou em empresas autorizadas. Mas existem licenças especiais para
pessoas físicas, estudantes, governos e universidades, cada qual com seus recursos e limitações.
O preço varia de acordo com a licença escolhida, a versão profissional padrão custa aproximadamente US$ 2.000. Para aqueles que desejam apenas testar o programa e os recursos, a
Wolfram Research Inc. oferece uma versão shareware que funciona por 15 dias e possui todas
as funções da versão completa, contudo não se pode salvar os cálculos efetuados. Para isso,
basta acessar o site http://www.wolfram.com/products/mathematica/trial.cgi.
Assim que você abre o programa, desconsiderando a tela de tutorial, esta é a interface
padrão da versão 6.0 do Mathematica:
61
Figura A.1: Interface do software Mathematica 6.0.
As operações aritméticas simples são similares a todos os programas de cálculos no computador. Como as versões do Mathematica são em inglês os seus comandos também o são. Para
serem executados devem ser confirmados com shift+ENTER ou ENTER do teclado numérico.
Abaixo seguem os principais:
1.Adição - Sinal de mais (+);
2.Subtração - Sinal de menos (-);
3.Multiplicação - Asterisco (*) ou espaço ( );
4.Divisão - Barra ( / ) ou ctrl+ barra (/);
6.Raiz Quadrada - digita-se Sqrt (com inicial maiúscula) com o valor desejado entre colchetes
ou ctrl+2 e ctrl+espaço para sair;
7.Valor Numérico - digita-se N e o valor Numérico desejado entre colchetes;
8.Valor Absoluto ou Módulo - digita-se Abs e o valor desejado entre colchetes;
9.Solve - o comando Solve é usado para resolução de equações de qualquer grau. Digita-se
Solve com o valor desejado entre colchetes e na hora de igualar tem que digitar dois
iguais (==);
62
10.Simplify - Este comando ajuda a simplificar valores, digitando Simplify e o valor desejado
entre colchetes.
A maioria das funções em Mathematica faz uso de argumentos e estes devem ser colocados
entre colchetes [...]. Por exemplo, Sin[x]. Dois ou mais argumentos ou informações são
separados por vírgulas. As chaves, {...}, são usadas para construir uma lista. Normalmente são
usadas para permitir que vários objetos sejam tratados como um só. Parênteses, (...), são usados
para agrupar os termos.
Para se fazer um gráfico de uma função de uma variável neste software, digita-se basicamente Plot[f[x],x,xmin,xmax]. Caso se trate do gráfico de uma circunferência, por exemplo, utiliza-se o comando ParametricPlot:
Sintaxe: ParametricPlot[x(t),y(t),x,xmin,xmax,y,ymin,ymax]
Para os gráficos em 3D o comando básico para plotar é: Plot3D, que mostra gráficos de
2 variáveis em 3D. Sintaxe: Plot3D[f[x,y],x,xmin,xmax,y,ymin,ymax]. É possível também, além de parametrizar gráficos em 2D, proceder da mesma forma no espaço. Basta escrever
a mesma sintaxe com uma variável a mais. Observe:
ParametricPlot3D[x(t),y(t),z(t),t,tmin,tmax]
Para resolver equações basta utilizar o comando:
Solve[(lado direito da equação) == (lado esquerdo da equação), incógnita].
Sistemas de equação tem sintaxe semelhante: Solve[eq1,eq2,...,eqN,incógnitas]. Este
comando é capaz de resolver equações (e sistemas de equações) literais, numéricas, trigonométricas, entre todos os tipos de funções (com uma restrição: não devem ultrapassar grau 4).
Em se tratando de equações diferenciais e sistemas sabe-se que existem inúmeros tipos,
podendo ser homogêneas ou não, lineares, ordens variadas, coeficientes variáveis, constantes
etc. No software Mathematica todas elas podem ser resolvidas utilizando-se basicamente um
único comando, DSolve. A sintaxe do comando é a seguinte:
DSolve[equação,função,var.independente].
Por exemplo, quando se calcula a função y(x), deve-se fazer: DSolve[equação,y[x],x].
Para resolver problemas de valores iniciais (PVIs), basta modificar a sintaxe da função para
receber uma lista de equações, de modo a ficar da seguinte forma:
DSolve[equação,cond1,cond2,...,y[x],x].
Na resolução de sistemas de equações diferenciais, da mesma forma que nos PVIs, novamente é requerida uma alteração na sintaxe para a adição de mais equações, assim :
DSolve[equação1,equação2,...,cond1,cond2,...,y1[x],y2[x]...,x].
63
Na maioria dos casos, é necessário recorrer à solução numérica. Para isso, usa-se o comando
NDSolve, fixando o valor numérico das condições iniciais.
Para aprender mais sobre o Mathematica, abaixo seguem duas sugestões de sites que foram
consultados para escrever esta breve apresentação e nos quais pode-se encontrar tutoriais e
materiais de apoio com inúmeros exemplos referente a este software.
http://www.ime.unicamp.br/∼marcio/tut2005/mathematica/
http://www.wolfram.com/
Download