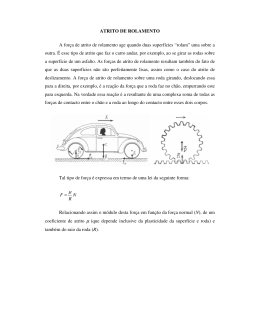
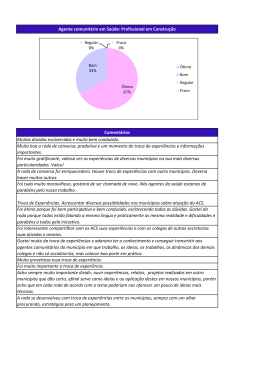
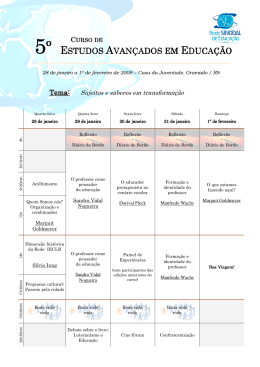
II CONGRESSO NACIONAL DE ENGENHARIA MECÂNICA II NATIONAL CONGRESS OF MECHANICAL ENGINEERING 12 a 16 de Agosto de 2002 - João Pessoa – PB Título: Propriedades de Contato de Rolamento de Sistema Veicular ROBERTO SPINOLA BARBOSA Professor Doutor da Escola Politécnica da Universidade de São Paulo – EP-USP Instituto de Pesquisas Tecnológicas do Estado de São Paulo - IPT e-mail: [email protected] Resumo: O modelamento matemático do comportamento dinâmico de veículos tem grande dependência da representativa descrição das forças de contato do conjunto roda/via produzida pelo sistema veicular. As forças de contato dependem dos movimentos relativos entre os corpos em rolamento, da forma da superfície de contato e de características do material. Veículos automotores sob rodas de borracha possuem grandes deformações devido à elasticidade do material. Em contrapartida veículo metro-ferroviário, com roda metálica cônica, produz pequena área de contato devido à elevada rigidez do material. As velocidades relativas são identificadas com auxílio das equações diferenciais de movimento do sistema dinâmico. A mecânica de contato descreve as propriedades do par de rolamento, baseando-se na descrição acurada da forma das superfícies em contato. A identificação das dimensões da elipse de contato, foi realizada com interpolação numérica baseada em splines, sobre a descrição geométrica da seção das superfícies. A partir dos movimentos relativos de translação e rotação do par roda/trilho um modelo discreto finito (EF) permite identificar as regiões de adesão e escorregamento na área de contato, compondo a força tangencial de interação entre os corpos. Foi utilizada a rotina FASTSIM proposta por Kalker para o cálculo das forças tangenciais. Um experimento foi montado com o objetivo de identificar a rigidez de contato entre corpos em contato de rolamento. O dispositivo é composto por uma roda que rola sobre uma pista retificada e permite medir as forças laterais em função do ângulo de ataque. Os resultados experimentais de rigidez de contato de rolamento obtidos nos ensaios de laboratório foram comparados com valores calculados. Observou-se boa concordância entre os resultados experimentais de coeficiente de rigidez de contato e os valores previstos analiticamente. Palavras-chave: dinâmica, veículo, contato, rolamento, ferrovia 1. INTRODUÇÃO Quando dois corpos elásticos rolam um sobre o outro, os pontos de sua superfície que entram em contato, podem permanecer lado a lado durante a passagem pela zona de contato, graças às deformações elásticas locais, até o ponto onde as contrações tangenciais desenvolvidas pelas deformações superem um limite, que é função da pressão normal e do coeficiente de atrito entre as superfícies. O conhecimento da distribuição das deformações tangenciais na zona de contato, e portanto do esforço transmitido pelo contato, são necessárias para a implementação de modelos de simulação numérica para o estudo do comportamento dinâmico de veículos. A identificação das tensões de contato vem sendo estudada desde o século XVIII com Hertz que desenvolveu as primeiras formulações analíticas para o cálculo das deformações de corpos cilíndricos submetidos à força normal. Para a determinação das deformações locais é necessária uma descrição precisa das superfícies em contato. Além das solicitações normais impostas no contato, em alguns casos pode haver movimento relativo tangencial ou angular entre os corpos. Este é o caso do sistema de rolamento ferroviário que utiliza rodas cônicas. Para o cálculo das forças tangenciais de contato entre corpos em rolamento, é necessária a determinação do escorregamento que depende da velocidade relativa entre os corpos em movimento e das propriedades do material. A motivação deste trabalho consiste na avaliação comparativa do algoritmo do cálculo das forças tangenciais de contato de rolamento com resultados experimentais. Foram realizados ensaios para a medição do coeficiente de rigidez de contato, parâmetro utilizado para o cálculo das forças tangenciais de contato. Os resultados experimentais foram comparados com o cálculo analítico realizado. 2. FUNDAMENTOS O modelamento matemático do comportamento dinâmico de veículos necessita da descrição das forças de contato do conjunto roda/via produzida pelo sistema veicular. As forças de contato dependem dos movimentos relativos entre os corpos em rolamento, da forma da superfície de contato e de características do material. As velocidades relativas podem ser calculadas com auxílio das equações diferenciais de movimento do sistema veicular composto pela estrutura, suspensão e roda. A área de contato depende da força normal e da forma das superfícies em contato. Considerando que as superfícies possuam curvaturas conhecidas é possível determinar a forma do contato utilizando a formulação de Hertz. A identificação das dimensões da elipse de contato, foi realizada com interpolação numérica baseada em splines, sobre a descrição geométrica da seção das superfícies. A partir dos movimentos relativos de translação e rotação do par roda/via um modelo discreto finito (EF) permite identificar as regiões de adesão e escorregamento na área de contato, compondo a força tangencial de interação entre os corpos.Diversos atores propuseram algoritmos para cálculo das forças tangenciais (Kalker,1982; Polach, 1999). Neste trabalho foi adotada a rotina FASTSIM desenvolvida por Kalker. Cada um dos aspectos mencionado será descrito adiante de forma detalhada. 2.1 Descrição dos Perfis Como as superfícies são identificadas de forma discreta (medidas ou geradas) através de pares ordenados de coordenadas cartesianas, técnicas de interpolação podem ser empregadas para a descrição completa do perfil. Foi utilizada a spline para descrever o perfil dos corpos em contato. Existem duas formas comuns de constituição de splines. A representação polinomial (piecewise polynomial, ou forma pp) e a representação na forma de combinação linear (forma B). A representação polinomial Pj descreve a curva em termos de polinômio local de coeficientes cij para cada intervalo entre os pontos b1, ..., bj+1 , exclusivamente crescentes. k Pj ( x ) = ∑ i =1 ( x − bj )k −i (k − i )! cij (1) A utilização de splines para a descrição dos perfis possui alguns vantagens: possui derivadas contínuas; permite a manipulação das curvas, realizando alisamento com desvio tratado pelo método de mínimos quadrados, permite a realização de subtração entre duas curvas e a rotação da curva. Estes aspectos são importantes pois permitem manipular geometricamente os perfis e calcular a curvatura com facilidade, informação necessária para a determinação das tensões. A curvatura Cy do perfil, é calculada em função do posicionamento lateral Y com base na primeira e segunda derivadas do perfil z, conforme a expressão a seguir. Cy = &z&y (1 + z& ) (2) 2 3/ 2 y A localização do ponto de contato para um determinado deslocamento lateral é feita através da determinação do mínimo da função distância entre os perfis. A função distância é obtida pela subtração das splines que descreve cada um dos perfis. O mínimo é obtido pelo zero da derivada da função distância de cada lado (esquerdo e direito). 2.2 Cálculo da Tensão Normal A metodologia utilizada para o cálculo da área de contato e portanto das tensões está baseada na metodologia proposta por Hertz (Seely, 1952). Assume-se que os corpos ilimitados (semiespaço) em contato sejam homogêneos, isotrópicos e elásticos de acordo com a lei de Hooke. Podese expressar a deformação elástica (ou profundidade de penetração) devido à força vertical Fz aplicada no ponto P (x, y, 0) com distância r (r2 = x2+y2) da origem, pela fórmula: δ P = u z = (1 − υ 2 )Fz / πEr (3) Considerando que o par de rolamento, devido a sua forma geométrica, apresenta uma região de contato na forma elíptica, as tensões são proporcionais à soma das curvaturas (inverso do raio) das superfícies nas várias direções conforme: 1 1 1 1 E σ ≅ b + + + R1R R2 R R1T R2 T 1 − υ2 (4) onde E é o módulo de elasticidade do material e υ o coeficiente de Poisson. 2.3 Movimentos Relativos Tangenciais Foi elaborado um modelo matemático do veículo para determinação dos movimentos relativos tangenciais entre a roda e a via. Uma representação simplificada linear de ¼ do veículo (Barbosa, 1996), pode ser observada na Figura 1. O sistema físico foi descrito com dois graus de liberdade correspondendo ao deslocamento lateral do rodeiro uy em relação à via e rotação angular ϕz . O sistema de referência adotado está vinculado à estrutura do veículo e trafega junto a este a uma velocidade constante Vo. Assumindo pequenos deslocamentos e desconsiderando os efeitos inerciais do truque, o conjunto de equações diferenciais de movimento pode ser obtido a partir da aplicação da 2a lei de Newton sobre o rodeiro nas direções dos graus de liberdade utilizando as dimensões (eo e bo) e propriedades elásticas (cx e cy) mostradas na figura: m 0 &&u y c y + 0 Θ ϕ && z 0 0 u y Ty1 + Ty 2 Fy + = c x e 2o ϕ z b o (Tx1 − Tx 2 ) Tϕ (5) De maneira simplificada e linear, pode-se exprimir as forças no contato nas direções longitudinal Txi e lateral Tyi como sendo proporcionais às velocidades relativas υx e υy entre as superfícies de contato roda/trilho. As constantes de proporcionalidade, kx e ky, relacionam os escorregamentos entre as superfícies da seguinte forma: Truque eo eo CZ/2 CZ/2 ϕZ Z Y ωX CY/2 CY/2 r1 r2 br Dormente bo bo CX/4 CX/4 Vo X Tx1 Tx2 Y CY/2 ϕZ Ty1 Ty2 CY/2 rN CX/4 CX/4 Figura 1 – Modelo do Truque Tx1, 2 = k x υx 1, 2 Vo e Ty1, 2 = k x υy 1, 2 (6) Vo u& λ u ϕ& b Tx 2 = − Tx1 = kx y + z o e Ty1 = Ty 2 = ky −ϕ z + y Vo Vo ro (7) De forma geral o escorregamento linearizado para o caso ferroviário (υx e υy), incluindo o escorregamento de pivotamento υsp, podem ser resumidas na forma matricial geral conforme apresentado a seguir: υ x 0 1 υ y = 0 + υ − δ / r r0 sp 0 0 (8) − λ 0 − ε 0 u y 1 − r0 + ϕ V 0 z 0 0 − e0 1 0 u& y + 1 ϕ& r 0 1 z 0 λ 0 ε λr0 υ g 1 0 + ϕg V − ε r0 0 0 − δ r / e 00 0 0 0 υ& g r0 ϕ& g 0 onde uy e ϕz são os graus de liberdade de um rodeiro, υg e ϕg são o alinhamento e inclinação da via e respectivas derivadas, λ a conicidade do rodeiro, δ a inclinação do plano de contato da roda. Substituindo as expressões 7 na equação diferencial de movimento obtêm-se: m 0 &&u y 1 2 k y + 0 Θ ϕ && z Vo 0 0 u& y cy + 2 2 k x b o ϕ& z 2 k x λb o / ro −2 k y u y Fy = c x e 2o ϕ z Tϕ (9) que correlaciona os graus de liberdade com os efeitos externos. Observa-se que o termo da primeira derivada é inversamente proporcional a velocidade Vo do veículo. Assim, o amortecimento modal se reduz em função do aumento da velocidade. 3. CÁLCULO DAS FORÇAS TANGENCIAIS NO CONTATO O equacionamento do problema tangencial de contato, traduz-se no fato de que, a todo ponto P(x,yt) dentro da elipse de contato, um escorregamento total W, é dado pela diferença entre o escorregamento de corpo rígido, introduzido pelo tensor (GT, Ωp) e a parte compensada pelo deslocamento elástico relativo U, entre os sólidos (diferença entre os deslocamentos do ponto de contato na roda e o respectivo no trilho). X N δ Z υsp Yt Yt P O yt Ty X Y Tx x b a υx , υy, υsp - Escorregamentos Tx , Ty - Forças Tangenciais X Tx Ty Y Vx υx υy Z Vx - Velocidade Longitudinal ωy - Velocidade Angular α - Angulo de Ataque (yaw) ωy α δ - Angulo do Plano de Contato N - Força Normal no Contato Figura 2 - Identificação dos Escorregamentos e Forças Tangenciais no Contato O escorregamento é dado pelo tensor composto pelos vetores: r GT = υ x { υy } 0 ′ e r ′ Ω P = 0 0 υ sp { } (10) No caso do rolamento estacionário, e considerando que a zona de contato evolui na direção longitudinal (x), tem-se: r r ∂ r r W = Vx GT + Ω p ∧ ( P − O ) − U ∂x (11) Considerando que o movimento permanece dentro do plano de contato (X, Yt) a componente na direção normal é nula. A equação acima, gera o sistema de equações correspondentes ao problema plano tangencial: ∂Ux Wx = υ x − yt ⋅υ sp − Vx ∂x e Wy Vx = υ y + x ⋅υ sp − ∂Uy ∂x (12) A resolução deste sistema de equações, exige o conhecimento de U. Baseado na teoria da elasticidade, é possível obter uma relação entre os deslocamentos elásticos relativos Ux,y e as deformações tangenciais tx,y (Soua, 1997). Esta resolução é apresentada por diversos autores (Kalker, 1967, François 1993). 3.1 Algoritmo de Cálculo A rotina FASTSIM adotada neste trabalho, é utilizada pela comunidade de dinâmica de veículos, sendo baseado na teoria de distribuição parabólica da pressão normal em uma área elíptica de contato (formulação de Hertz). Considera a hipótese de proporcionalidade entre os deslocamentos elásticos e deformações tangenciais, na zona de contato limitado pela lei de atrito de Coulomb. A discretização da elipse de contato para cálculo da deformação de cada elemento que compõe a força tangencial de contato é realizada conforme exemplificado na Figura 3. O aspecto não linear de transição até o escorregamento completo é provido pela saturação individual de cada elemento respeitando a limitação de Coulomb em função da força normal. Discretização da Malha para Cálculo da Forças Tangenciais Tx , Ty - (mx = 5 ; my = 6) X i Yt i+1 b X dx dy Y Z a Figura 3 – Discretização da Elipse de Contato A Figura 4 apresenta um exemplo de resultado do cálculo com 180 elementos discretos (15 × 12) contendo escorregamento horizontal e de pivotamento. Neste caso foi adotada uma força normal de 105 kN, coeficiente de atrito de 0,5, escorregamentos horizontais moderados (longitudinal de 0,0017 e transversal de 0,00056) e rotacional elevado (-0,91). Observa-se quando houve escorregamento no elemento quando identificado pelo sinal “°” . Nota-se na região interna da elipse de contato, que a direção das forças tangenciais dos elementos definem um pólo cuja força tangencial é nula. Os valores de forças de contato (TX e TY) estão expressos no canto inferior direito da figura. Distribuição das Tensões Tangenciais 4 nux = 0.0017 3 Área = 100 mm2 b = 3.4 mm nuy = 0.00056 mx = 15 fi = -0.91 m-1 my = 12 Direção Transversal (mm) 2 1 0 a = 9.4 mm -1 -2 mu= 0.5 -3 -4 -10 N = 105 kN Tx = -17.9 kN x Adesão Ty = 34.3 kN o Escorregamento TT = 38.7 kN -8 -6 -4 -2 0 2 Direção Longitudinal (mm) 4 6 8 10 Figura 4 – Distribuição das Tensões Tangenciais (Elevada Rotação Relativa) 4. MEDIDA EXPERIMENTAL Foram realizadas medidas experimentais das forças tangenciais de contato em função do escorregamento entre os sólidos em contato de rolamento. Foi utilizado um dispositivo de ensaio composto de uma roda que rola sobre uma pista plana com eixo de rolamento de direção controlada. Foi medida a força lateral em função do ângulo de ataque da roda. Para pequeno escorregamento as forças tangenciais e momento (Tx, Ty e Msp), normalizadas para carga vertical unitária, são funções dos escorregamentos tangenciais (υx e υy) e da rotação relativa entre as superfícies (ver Figura 5), podendo ser expressa de forma matricial e linear por: Tx C11 Ty = G ab 0 M 0 sp 0 C22 − ab C32 υ x − ab C23 υ y abC33 υ sp 0 (13) onde a e b são as dimensões da elipse de contato Cmn os coeficientes de Kalker e G modulo de cisalhamento do material. Isolando apenas o termo na direção lateral e considerando a carga total N, obtêm-se: Ty = -N2/3 G ab C22 υy - N G (ab)3/2 C23 υsp. (14) No caso do dispositivo concebido, como a roda não possui conicidade (φ = 0 pois sin δ = 0) e o plano de contato é paralelo ao eixo de rotação da roda, o segundo termo da equação acima é nulo. Portanto a expressão pode ser simplificada para: Ty = -N2/3 G ab C22 υy ou Ty = ky υy ou ky = Ty / υy = -N2/3 G ab C22 (15) Y Roda Cônica y& = Vy V α Roda αVc Vc=ωro Vx ω X R υsp = ω sinδ a) direção da roda (vista em planta) δ b) rotação no plano de contato (spin) Figura 5 – Indicação da Velocidade Relativa A constante de proporcionalidade ky que condiciona a relação entre a força tangencial e o escorregamento relativo corresponde à rigidez do contato (coeficiente C22). É função das proporções da elipse de contato (ab) calculadas para uma carga normal unitária N, das características do material (G). Neste experimento o valor de carga normal é mantido constante e portanto a proporção da elipse de contato também. A constante de proporcionalidade ky é função de Ty /υy e obtida diretamente pela inclinação na origem dos ângulos na curva de resultados de ensaio. O valor experimental de inclinação, próximo da origem dos ângulos, correspondente ao coeficiente de rigidez de contato, foi identificado e comparado aos valores propostos por Kalker. 4.1 Dispositivo de Ensaio O dispositivo utilizado para a realização dos ensaios consiste em uma roda, guiada por um sistema deslizante retilíneo conforme apresentado na Figura 6. A roda possui uma superfície de rolamento circular de raio R que rola sobre uma superfície metálica plana. A seção transversal da roda possui raio idêntico. A roda está suportada por mancais de rolamento fixados a uma estrutura (carro). O carro está ligado ao sistema deslizante por meio de três tirantes articulados. Este sistema permite que o carro se movimente livremente na direção vertical. Uma chapa de aço plana e retificada foi utilizada como pista de rolamento da roda Dois sistemas de medição foram utilizados para amostrar informações durante o ensaio. Um sistema com dois tirantes laterais com uma célula de carga para medida da força lateral no tirante inferior. Outro sistema composto por um parafuso com rosca micrométrica que controla o ângulo do movimento da roda em relação à direção do movimento da guia (ângulo de ataque). A roda possui um diâmetro de 0,250 metros e raio de arredondamento da superfície de 0,125 metros. Esta geometria produz elipse de contato com semi-eixos idênticos no plano (a/b ≈ 1). A identificação de força lateral na região de contato é obtida por relação de momentos a partir da força medida e respectivas distâncias. Os ensaio foram realizados movimentando-se o carro sobre a pista, sempre no mesmo sentido. Para cada ensaio foi ajustado um valor de ângulo de ataque do carro e a força lateral desenvolvida foi medida. Um sistema de amostragem de dados foi utilizado para observação da força lateral ao longo do movimento do carro. Foi utilizado o valor médio de regime da força lateral para cada ângulo de ataque utilizado em cada ensaio. Carro Guia Deslizante F Z Roda Y α R Regulagem do Ângulo Vy Vo Vx X Figura 6 - Dispositivo de Ensaio 4.2 Resultados O resultado proveniente do ensaio consiste em conjunto de pares de valores contendo o ângulo do carro e a força lateral desenvolvida. Os pares foram desenhados num gráficos cartesianos típico conforme apresentados na Figura 7. Os pontos medidos estão identificados com circulo e o traço pontilhado corresponde ao cálculo realizado. Para carga de ensaio de 496,4 N, produz-se uma elipse de contato com semi-eixos principais de dimensões 0,742 mm. Nesta situação a área total é de 1,73 mm2 e a tensão máxima de contato (no centro) de 430,6 MPa. O ângulo de ataque foi incrementado gradualmente até a saturação das forças tangenciais de contato (máxima força lateral disponível) no valor de 270 N, resultando num coeficiente de atrito da ordem de 0,57 (escala à direita). Para o caso da pista seca o escorregamento produzido foi de até 11 mrad. Foi realizada também uma medição utilizando baixo coeficiente de atrito, lubrificando-se a pista com uma fina camada de óleo pulverizada. O ângulo de ataque foi incrementado até 2 mrad e a velocidade longitudinal utilizada foi de 5 mm/s. A inclinação inicial da curva é constante até cerca de 0,3 mrad. A partir de 0,5 mrad a inclinação da curva diminui caracterizando o início do escorregamento. A força máxima lateral foi de 63 N resultando num coeficiente de atrito da ordem de 0,13. Fy/Fn 0.604 Ensaio Escorregamento Lateral 300 FSIM... mi: 0.56 [-] Ens 30 (16/12/96) 0.504 250 a: 0.7419 [mm] Peso: 496.4 Newtons Forca Lateral (N) 200 0.403 b: 0.742 [mm] b/a: 1 [-] 0.302 150 Pcentro: 430.6 [MPa] 100 0.201 dy/dx: 1.492e+005 [N/rad] 50 0.101 c22o: 3.305 (Ensaio) C22: 3.699 (Kalker) 0 -2 0 2 4 6 Ângulo (mrad) 8 10 12 0.000 Figura 7 – Resultado Típico de Ensaio (Pista seca) Fy/Fn 0.145 Ensaio Escorregamento Lateral 70 FSIM... 60 Ens 24 (21/11/96) Oleo mi: 0.1315 [-] Peso: 483.9 Newtons a: 0.7356 [mm] 0.124 0.103 50 Forca Lateral (N) b: 0.7357 [mm] 40 0.083 b/a: 1 [-] 0.062 30 Pcentro: 426.9 [MPa] 0.041 20 dy/dx: 1.554e+005 [N/rad] c22o: 3.501 (Ensaio) 10 0.021 C22: 3.699 (Kalker) 0 -0.5 0 0.5 1 Ângulo (mrad) 1.5 2 Figura 8 – Resultado Típico de Ensaio (Pista Lubrificada) 0.000 2.5 5. COMPARAÇÃO DE RESULTADOS Para efeito de visualização dos resultados do cálculo analítico foi apresentada a distribuição das forças laterais em cada elemento discreto da região de contato (elipse), considerando as mesmas condições do ensaio (1,5 mrad). Observa-se na Figura 9 o vetor com intensidade e direção das forças e a identificação (círculo) quando o modulo supera a relação de contato (Coulomb). Na Figura 10 apresenta-se a distribuição das forças laterais e limite de adesão (linha pontilhada) ao longo do comprimento de rolagem (direção longitudinal). Finalmente na Figura 11 apresenta-se uma visão tridimensional da área de contato com a respectiva intensidade das tensões laterais produzidas (eixo Z com cores). Comparando-se os resultados para a pista com atrito elevado, observou-se boa aproximação (12 %) entre o resultado analítico (C22 = 3,699) e experimental (C220 = 3,305) da inclinação na origem (rigidez de contato). Os valores intermediários da força lateral até o escorregamento completo (saturação) apresentaram entretanto um desvio maior (ver Figura 7). Para o caso de baixo atrito (pista lubrificada) observou-se melhor aproximação (5,3 %) entre o resultado analítico (C22 = 3,699) e experimental (C220 = 3,501) e os valores intermediários da força lateral até o escorregamento completo apresentaram boa concordância também, conforme apresentado na Figura 8. Distribuição das Tensões Tangenciais 1 Área = 1.73 mm2 nux = 0 0.8 nuy = -0.0015 mx = 15 b = 0.742 mm my = 12 fi = 0 m-1 Direção Transversal (mm) 0.6 0.4 0.2 0 -0.2 a = 0.742 mm -0.4 -0.6 -0.8 -1 -1 mu= 0.5 N = 0.4964 kN Tx = 0 kN x Adesão Ty = 0.184 kN o Escorregamento TT = 0.184 kN -0.8 -0.6 -0.4 -0.2 0 0.2 Direção Longitudinal (mm) 0.4 0.6 0.8 1 Figura 9 – Distribuição das Forças Laterais e Identificação do Escorregamento Distribuição das Tensões (FASTSIM) 250 mu = 0.5 nux = 0 nuy = -0.0015 Modulo Tensão Tangencial (MPa) 200 fi = 0 m-1 150 100 50 a = 0.742 mm b = 0.742 mm 0 -0.8 -0.6 -0.4 -0.2 0 0.2 Direção Longitudinal (mm) 0.4 0.6 0.8 Figura 10 - Distribuição das Forças Laterais e Limite de Adesão (Coulomb) Distribuição das Tensões Laterais 250 Tensão (MPa) 200 150 100 50 0 1 0.5 1 0.5 0 0 -0.5 Direção Lateral (mm) -0.5 -1 -1 Direção Longitudinal (mm) Figura 11 – Distribuição das Tensões Tangenciais na Área de Contato 6. CONCLUSÕES Foi apresentada a formulação para o cálculo das forças tangenciais de contato de corpos em rolamento. Foi descrita a metodologia para a interpolação de perfis com splines utilizada para a determinação das proporções da elipse de contato. Foi apresentado o modelo matemático do veículo que calcula o comportamento dinâmico das rodas e permite a determinação dos escorregamentos na região do contato. Foi descrito o experimento realizado para a medição da rigidez de contato cujos resultados foram comparados com a metodologia analítica de cálculo. Observa-se por comparação com os resultados experimentais que a metodologia de cálculo utilizada apresenta boa concordância da inclinação na origem da curva de rigidez de contato. Os valores de saturação de contato apresentam também bons resultados para a comparação realizada com os ensaios realizados com baixo atrito (pista lubrificada). Para a pista seca, os resultados de saturação calculados ficaram acima dos valores medidos revelando alguma limitação do método para elevado coeficiente de atrito. 7. REFERÊNCIAS BARBOSA, R. S. (2000). Interação de Contato do Par Roda/Trilho, Congresso Nacional de Engenharia Mecânica, CONEM 2000, 11 pp, Natal, RN. BARBOSA, R. S.; COSTA, A. (1996). Dinâmica do rodeiro ferroviário. Revista Brasileira de Ciências Mecânicas - ABCM, v. 18, n. 4, pp. 318-329. BARBOSA, R. S. (1997). Vérification Expérimentale des Coefficients de Raideur au Contact. Institut de Recherche sur le Transporte et leur Sécurité (INRETS), Paris, França, 56 p. FRANÇOIS, D. PINEAU A. (1998) Mechanical Behavior of Materials, Vol. II, Kluwer Academic Publishers, France. KALKER, J. J. (1982). A fast algorithm for the simplified theory of rolling contact. Journal of Vehicle System Dynamics, Swets & Zeitlinger, v. 11, pp. 1-13. KALKER, J. J. (1967). On the rolling contact of two elastics bodies in the presence of dry friction. Delft, Netherlands. PhD. Thesis, Delft University, Holland. POLACH, O. (1999) A fast wheel-rail forces calculation computer code. Journal of Vehicle System Dynamics, Swets & Zeitlinger, Supplement 33, pp. 728-739. SEELY, F. B. SMITH, J. O. (1952). Advanced Mechanics of Materials, University of Illinois, 2nd Edition, 450 p., Editora John Willey & Sons, EUA. SOUA, B. (1997) Etude de l’Usure et de l’Endommagement du Roulement Ferroviaire avec des Modeles d’Essieux Non-Rigides, These de Doctorat, 213 p. Paris, France. Title: Rolling Contact Properties of Vehicular System Roberto Spinola Barbosa Professor Doutor da Escola Politécnica da Universidade de São Paulo – EP-USP Instituto de Pesquisas Tecnológicas do Estado de São Paulo - IPT e-mail: [email protected] Abstract: Vehicle dynamic modelling has dependence from a representative vehicle wheel/track contact force description. Contact forces depend upon rolling bodies relative movements, surface shape and material properties. Rubber vehicles tyre has large deformations due to material elasticity. On the contrary rail vehicle with conic iron wheel produces small contact area. Relative speeds are to be identified with moving differential equations of the dynamic system. Based in the surface shape, contact mechanics describes rolling bodies properties. Spline numeric interpolation is used over geometric surface description to identify contact ellipse proportions. A discrete finite model is used to identify slip stick contact regions based on wheel/rail translation and rotation relative movements forming tangential interaction force. FASTSIM routine proposed by Kalker is used to tangential force calculations. An experiment has been set to identify rolling bodies contact stiffness. A wheel-based device has been used to measure lateral rolling force due to attack angle. Experimental results have been compared with analytical calculations. It has been observed good agreement between experimental and analytical rolling contact stiffness. Keywords: dynamics, vehicle, rolling contact, railway.
Download