TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
TRANSMISSÃO DIGITAL ATRAVÉS DE CANAIS DE BANDA LIMITADA
Muitos canais de comunicação, incluindo canais telefônicos e alguns canais de rádio,
podem ser caracterizados como filtros lineares de banda limitada. Consequentemente estes
canais são descritos pela sua resposta em freqüência,
C ( f ) = A( f ) ⋅ e jθ ( f ) ,
onde A( f ) é a resposta em amplitude e θ ( f ) é a resposta em fase. Outra característica
que é usada algumas vezes no lugar da resposta em fase é o atraso de envoltória ou atraso
de grupo, definido como
τ(f )= −
1 dθ ( f )
⋅
df
2π
Um canal é dito sem distorção ou ideal se, dentro da largura de banda W ocupada
pelo sinal transmitido, A( f ) for constante e θ ( f ) for uma função linear com a freqüência (ou
o atraso de grupo τ ( f ) for constante). Caso contrário, se A( f ) e τ ( f ) não forem constantes
dentro da banda ocupada pelo sinal transmitido o canal distorce o sinal. Se A( f ) não for
constante a distorção é chamada distorção em amplitude e se τ ( f ) não for constante a
distorção á chamada de distorção em atraso.
Questão 1 – Considere a transmissão de um sinal com largura de banda W. Desenhe
qual deve ser a resposta em freqüência do canal em módulo, A( f ) , e fase, θ ( f ) , para
que o canal não introduza distorção no sinal recebido.
Como conseqüência da resposta em amplitude e fase (atraso) causada pela
característica de resposta em freqüência, C ( f ) , de um canal não ideal, uma sucessão de
pulsos transmitidos através do canal, com taxas comparáveis a largura de banda W, será o
espalhamento no tempo dos pulsos de tal forma que eles não podem ser identificados
separadamente no receptor.
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
O programa do exemplo1.m modela um canal de comunicação utilizando um filtro
digital. Para diferentes seqüências de bits transmitidos no canal o programa mostra as
seqüências recebidas com o efeito da distorção.
Questão 2 – Analisando a resposta em freqüência do canal de comunicação (filtro),
justifique porque pode ocorrer distorção e quando vai ocorrer distorção.
Para um canal ideal, com a resposta em freqüência conforme descrita na Questão 1, existe
um pulso transmitido no tempo que é limitado exatamente à largura de banda W. Este
formato de pulso é sinc, dado por
x(t ) =
sin (π t T )
πt T
1, − 1 2T ≤ f ≤ 1 2T
X(f )=
0, fora
Considerando agora a transmissão dos bits ou símbolos utilizando estes pulsos, com taxa
de transmissão R = 1 T , a banda ocupada pelo sinal será de W = R 2 .
O programa exemplo2.m mostra exemplos de transmissão digital em banda base (PAM)
utilizando pulsos tipo sinc.
Questão 3 – Identifique na figura 3 gerada pelo exemplo2.m qual a seqüência de
símbolos transmitidos e qual a taxa de transmissão.
Justifique porque a transmissão digital em banda base utilizando pulsos tipo sinc seria a
melhor escolha e porque ela não pode ser implementada na prática.
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
Uma alternativa de pulso de banda limitada que não gera interferência nos instantes de
amostragem dos pulsos vizinhos é o coseno levantado (raised cosine). O programa
exemplo3.m mostra exemplos deste pulso no domínio do tempo e da freqüência, para
diferentes valores do fator de roll-off.
Questão 4 – Justifique porque é possível gerar este tipo de pulso na prática.
Qual a implicação da escolha do valor do fator de roll-off ?
Qual a faixa de variação possível do fator de roll-off ?
EQUALIZADORES LINEARES
O tipo mais comum de equalizador de canal usado na prática para reduzir a
interferência intersimbólica (ISI) é um filtro linear FIR com coeficientes {ci } ajustáveis. Em
canais cuja característica da resposta em freqüência é desconhecida mas invariante no
tempo, podemos determinar a característica do canal e ajustar os parâmetros do
equalizador. Uma vez que os coeficientes do equalizador foram ajustados eles permanecem
fixos durante a transmissão dos dados. Este tipo de equalizador é denominado de preset
equalizer. Por outro lado, equalizadores adaptativos atualizam seus parâmetros em
intervalos periódicos durante a transmissão dos dados, de tal forma que eles possam se
ajustar à canais com variações lentas no tempo. Considere inicialmente as características
de projeto de um equalizador linear do ponto de vista do domínio da freqüência.
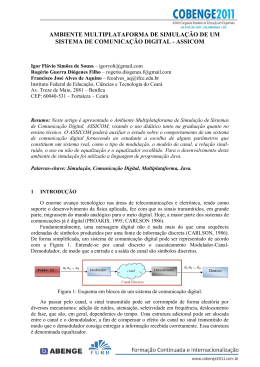
Entrada
de Dados
Detetor
GT ( f )
C( f )
Filtro de
Transmissão
Canal
+
GR ( f )
GE ( f )
Filtro de
Recepção
Equalizador
n(t )
Ruído
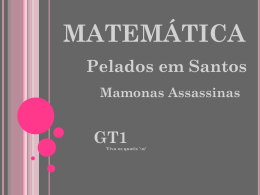
Figura 1 – Diagrama de Blocos de um Sistema com Equalizador
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
O receptor consiste de um filtro casado com resposta em freqüência G R ( f ) em cascata com
o filtro equalizador de canal que possui resposta em freqüência G E ( f ) . A resposta do filtro
de recepção G R ( f ) é casada com a resposta do filtro de transmissão, ou seja,
G R ( f ) = GT* ( f ) e o produto G R ( f ) ⋅ GT ( f ) é usualmente projetado de tal forma que haja ISI
zero nos instantes de amostragem, como por exemplo no caso de G R ( f ) ⋅ GT ( f ) = X RC ( f ) ,
onde X RC ( f ) é a resposta em freqüência do coseno levantado.
Para o sistema mostrado na Figura 1 em que a resposta em freqüência do canal não
é ideal, a condição desejada para ISI zero é
GT ( f ) ⋅ C ( f ) ⋅ G R ( f ) ⋅ G E ( f ) = X RC ( f )
onde X RC ( f ) é a característica espectral desejada do coseno levantado. Dado que pela
condição de projeto G R ( f ) ⋅ GT ( f ) = X RC ( f ) , a resposta em freqüência do equalizador que
compensa a distorção do canal é
GE ( f ) =
1
1
=
⋅ e − jθ C ( f ) .
C( f ) C( f )
A resposta em amplitude do equalizador é G E ( f ) = 1 C ( f ) e sua resposta em fase
θ E ( f ) = −θ C ( f ) . Neste caso o equalizador possui a resposta em freqüência inversa do
canal. Observe que neste caso o equalizador elimina completamente a ISI causada pelo
canal. Dado que o equalizador força a ISI a ser zero nos instantes de amostragem t = kT
para k = 0, 1, K , o equalizador é chamado de zero-forcing equalizer. Portanto a entrada
para o detetor é
z k = ak + η k ,
k = 0, 1, K
onde η k representa o ruído aditivo e a k o símbolo desejado. Na prática a ISI causada pelo
canal é usualmente limitada a um número finito de símbolos em ambos os lados do símbolo
desejado.
Questão 5 – O programa exemplo4.m implementa um equalizador. Compare os
gráficos do pulso na entrada e na saída do equalizador.
a) Este equalizador elimina a interferência de quantos símbolos anteriores e posteriores
ao símbolo atual ?
b) Modifique o equalizador para que ele equalize 4 símbolos anteriores e posteriores.
TEORIA DE COMUNICAÇÕES II – PROF. MARCELO E. PELLENZ
Download