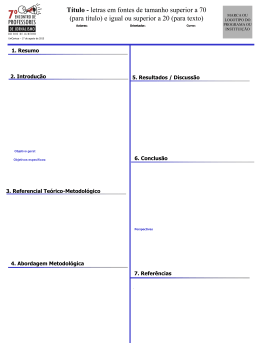
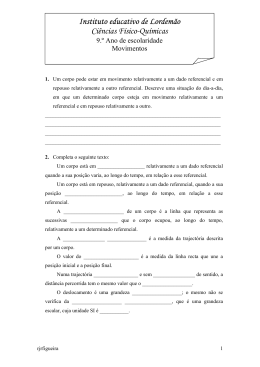
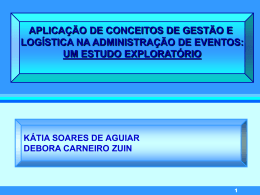
DEPARTAMENTO DE FÍSICA APONTAMENTOS DE CINEMÁTICA para a Cadeira de MECÂNICA E ONDAS Movimento circular e movimento relativo João Fonseca 4 – Movimento circular Quando o raio de curvatura é constante e igual a R – ou seja. quando a trajectória é uma circunferência – o vector velocidade pode ser escrito na forma v = R(dθ/dt) ûθ ou v = ωR ûθ, onde [30] ω = dθ/dt é a velocidade angular. É conveniente definir o vector velocidade angular w como se indica na figura 21: o seu módulo é igual a dθ/dt, a sua direcção é perpendicular ao plano do movimento, e o seu sentido é dado pela regra da mão direita – quando os outros dedos apontam o sentido da rotação, o polegar aponta no sentido de ω. R ω β v r Figura 21 – Definição do vector velocidade angular ω Resulta da maneira como foi definido que o vector velocidade angular verifica a expressão [31] v=ωx r Com efeito, o módulo de ω x r é ω r senβ = ωR, que é o módulo da velocidade no movimento circular. Verifique que a direcção e o sentido do vector velocidade resultam correctos quando se usa a expressão [31]. 5 – Movimento relativo de translacção. Em muitas situações é importante comparar descrições de um dado movimento feitas por observadores que estão em movimento relativo de translacção entre si. Por conveniência, vamos considerar que (S) é o referencial de um observador em repouso e (S’) é o referencial de um observador móvel♣. (S’) m (S) r’ rR r Figura 22 – Movimento relativo de translacção A figura 22 mostra que os vectores posição da partícula vistos pelos dois observadores se relacionam através de [32] r’ = r – rR onde rR é o vector posição da origem do referencial móvel, em relação ao referencial fixo. A derivação da expressão [32] conduz directamente à Como se sabe, é arbitrário dizermos que um dado objecto está fixo: o chão que pisamos está suficientemente fixo para descrevermos em relação a ele o movimento de um projéctil, mas acompanha os movimentos de rotação e translacção da Terra, movimento do Sistema Solar na galáxia, etc... ♣ relação existente entre as velocidades da partícula segundo os dois observadores: [33] v’ = v – vR e derivando novamente obtém-se a relação entre as acelerações: [34] a’ = a – aR A última expressão tem uma consequência importante: se o movimento relativo entre os observadores for rectilíneo e uniforme, aR será zero e ambos os observadores determinam a mesma aceleração para o objecto móvel. Se no referencial (S) se verificar o Princípio da Inércia, que diz que um corpo livre de interacções mantém constante a sua velocidade, e se não existir aceleração de (S’) em relação a (S), será pela equação [34] a’ = a = 0, ou seja, o Princípio da Inércia verifica-se também em (S’). Chamamos referencial inercial a um sistema de eixos em que seja verificado o Princípio da Inércia. Podemos agora concluir que se (S) for um referencial inercial, qualquer outro referencial que tenha em relação a (S) um movimento de translacção rectilíneo e uniforme será também um referencial de inércia. Por esse motivo, designam-se por referenciais equivalentes dois sistemas de eixos com movimento relativo de translacção rectilíneo e uniforme. Um referencial que sofra uma aceleração não pode ser um referencial inercial. Um autocarro que trava (isto é, desacelera) é um bom exemplo de um referencial não inercial. Um objecto abandonado a si mesmo tende a manter o seu movimento inalterado (Princípio da Inércia) e por isso quando o autocarro trava esse objecto tende a acelerar em relação ao referencial autocarro. Se conseguirmos identificar um referencial inercial, poderemos testar os outros referenciais verificando se têm aceleração em relação ao primeiro. A Mecânica Clássica (ou Newtoniana) resolve este problema postulando que o Espaço Absoluto é imóvel – logo, é um referencial inercial. Podemos imaginar esse referencial imóvel como sendo definido por quatro estrelas no Cosmos, mas ainda assim estaremos a fazer uma aproximação, visto que as estrelas acompanham os movimentos das suas galáxias. Na prática, interessa-nos que o referencial com que trabalhamos seja “suficientemente inercial” para estudarmos o movimento de que nos ocupamos. Se quizermos estudar a queda de uma maçã, a superfície da Terra está suficientemente em repouso. Já o movimento do planeta Mercúrio será difícil de descrever e explicar se tomarmos a Terra como referencial, como verificaram os astrónomos anteriores a Copérnico (séc. 16) que usavam um sistema geocêntrico para o Sistema Solar. 6 – Movimento relativo de rotação. Se um referencial girar em relação a outro considerado fixo, os respectivos observadores descreverão de modo diferente o movimento de uma mesma partícula. A figura 23 exemplifica essa situação. (S) z (S’) z’ ω y’ r = r’ y x x’ Figura 23 – Os eixos do referencial (S’) giram em torno do eixo de rotação indicado a traço-ponto. A origem dos dois referenciais mantém-se coincidente. Num exemplo importante de aplicação, o eixo a traço-ponto seria o eixo de rotação da Terra, e o eixo Oz’ a vertical (direcção do fio do prumo) de um lugar, por exemplo Lisboa. O referencial fixo poderia ser definido astronomicamente (eixos apontados para estrelas distantes). Como comparar as velocidades e as acelerações determinadas por dois observadores, um fixo e outro a girar? Como as origens se mantém coincidentes, o vector posição é o mesmo independentemente do referencial que se considere. Podemos afirmar que [35] r = xûx + yûy + zûz,= x’ ûx’ + y’ ûy’ + z’ ûz’ onde se considertam as duas maneiras possíveis de decompôr o vector posição. Para o cálculo da velocidade, vamos optar por derivar a segunda decomposição, mas calculando segundo o ponto de vista do referencial (S): v = dr/dt = d/dt(x’ ûx’ + y’ ûy’ + z’ ûz’) = (dx’/dt) ûx’ + (dy’/dt) ûy’ + (dz’/dt) ûz + ’ x’ (dûx’/dt)’+ y’(dûy’/dt)’+ z’ (dûz’/dt). Foi necessário derivar os vectores de base do referencial (S’) pois estamos a calcular a velocidade segundo o observador em (S), para quem aqueles vectores de base estão a girar. (dûy/dt) ω ûy’ Figura 24 – Derivada do vector unitário de base de um eixo girante Podemos considerar ûy’ , por exemplo, como o vector posição de um ponto que se encontra na sua extremidade, e que gira com velocidade angular ω. A derivada (dûy’/dt) será o vector velocidade desse ponto (Figura 24). De acordo com a equação [31], deverá então ser (dûy’/dt) = ω x ûy’ . Resultados análogoa aplicam-se aos outros vectores de base, e a velocidade v pode ser escrita na forma v = [(dx’/dt) ûx’ + (dy’/dt) ûy’ + (dz’/dt) ûz’] + + x’ ω x ûx’’+ y’ ω x ûy’’+ z’ ω x ûz’.= [(dx’/dt) ûx’ + (dy’/dt) ûy’ + (dz’/dt) ûz’] + ωxr A quantidade entre parentesis rectos é a velocidade observada no referencial (S’), pelo que se pode concluir que [36] v = v’ + ω x r que é a relação procurada entre as duas velocidades. Para relacionar as acelerações, há que derivar [36]: a = (dv/dt) = d/dt(v’x’ ûx’ + v’y’ ûy’ + v’z’ ûz’) + d/dt(ω x r). Repetindo o raciocínio quanto à derivação dos vectores de base, e admitindo que ω é constante, resulta: a = (a’x’ ûx’ + a’y’ ûy’ + a’z’ ûz’) + ω x (v’x’ ûx’ + v’y’ ûy’ + v’z’ ûz’) + ω x v Identificando os vectores, usando [36] e resolvendo em ordem a a’, resulta: [37] a’ = a - 2 ω x v’ - ω x (ω x r) Em conclusão, o observador que está num referencial girante vê duas componentes de aceleração adicionais, que resultam da sua própria rotação. A parcela aCor = -2 ω x v’ designa-se por aceleração de Coriolis. A parcela ac = - ω x (ω x r) designa-se por aceleração centrífuga. A aceleração de Coriolis só afecta os corpos que se movem em relação ao referencial (S’), pois anula-se se v’ = 0. Os corpos que se movem à superfície da Terra ficam sujeitos à aceleração de Coriolis quando observados a partir da Terra. A aceleração centrífuga é responsável pelo facto de a aceleração de queda dos corpos no campo gravítico depender da latitude. Exemplo 4 – Imagine que a velocidade de rotação da Terra aumentava gradualmente. Para que duração do dia a aceleração da gravidade em Lisboa se reduzia a zero? Qual seria a situação no Equador? E no Polo Norte? Latitude de Lisboa: 39ºN. ω2Rcos2λ Solução: A figura ao lado mostra como o efeito da aceleração centrífuga associada ao movimento de rotação da Terra corresλ ponde (em primeira aproximação) a subtrair ω2Rcos2λ ao valor da aceleração ac g0 da gravidade, sendo λ a latitude. Para que a aceleração da gravidade se anule (imponderabilidade) deve ser g0 = ω2Rcos2λ. Substituindo R po 6360000m, λ por 39º e g0 por 9.8 ms-1, resulta ω = 1.597x10-3 rads-1. Este valor corresponde à velocidade angular da Terra na situação pretendida, e o período de rotação correspondente é dado por T = 2π/ω = 3933 s, ou seja, T = 1h05m34s. No Equador, a componente centrífuga da aceleração seria superior a g0, e os objectos que não estivessem fixos seriam projectados no espaço. No Polo Norte, a situação não se alteraria, pois a aceleração centrífuga seria nula (cos 90º = 0).
Download